 電子發燒友App
電子發燒友App


為搞清IO結構,首先看看上拉和下拉電阻的作用。
一、上拉電阻
上拉就是將不確定的信號通過一個電阻鉗位在高電平!電阻同時起限流作用!下拉同理!
上拉電阻是用來解決總線驅動能力不足時提供電流的。一般說法是拉電流,下拉電阻是用來吸收電流。
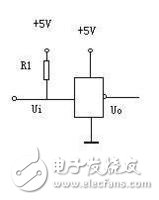
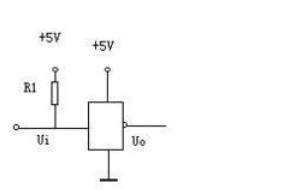
1、在用TTL電路驅動CMOS電路時,若TTL的高電平低于CMOS要求的高電平的門限值(1,TTL電平: 輸出高電平>2.4V,輸出低電平<0.4V。在室溫下,一般輸出高電平是3.5V,輸出低電平 是0.2V。最小輸入高電平和低電平:輸入高電平>=2.0V,輸入低電平<=0.8V,噪聲容限是 0.4V。 2,CMOS電平: 1邏輯電平電壓接近于電源電壓,0邏輯電平接近于0V。而且具有很寬的噪聲容限。),此時需用上拉電阻來提升輸出高電平的電壓值 。
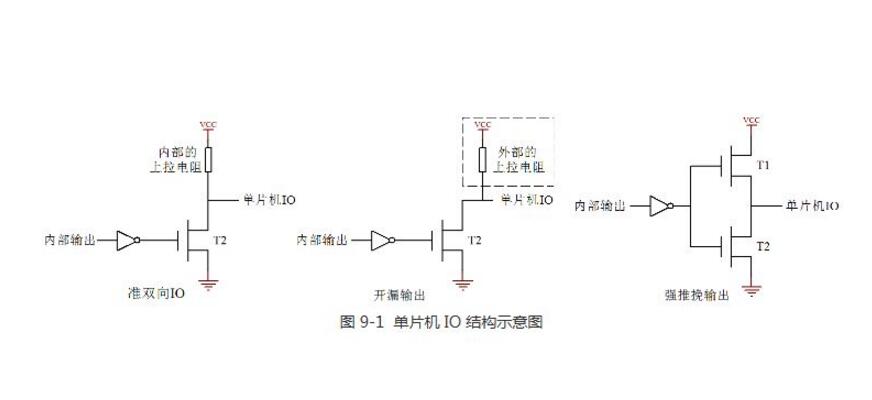
2、OC門必須外加上拉電阻,才能使用。(OC門:三極管的叫集電極開路,場效應管的叫漏極開路,簡稱開漏輸出。具備"線與"能力,有0得0。 )
3、為加大輸出管腳的驅動能力,單片機的引腳常接入上拉電阻,(AVR單片機可配置是否接上拉,51單片機P1 P2 P3均帶上拉,P0口不帶,所以用P0口做按鍵,液晶等應用時要自己加上上拉電阻,否則無法使用切記)
4、CMOS芯片上為防止靜電破壞,不用的管腳不能懸空,需要接上拉電阻降低輸入阻抗,提供泄荷通路。
5、提高總線的搞電磁干擾能力,懸空就容易就電磁干擾。
二、上拉電阻阻值的選擇
1、為節約功耗或使灌電流足夠大,阻值要大,電流小。
2、為確保足夠的驅動電流,阻值要小,電流大。
3、對于高速電路,過大的上拉電阻可能導致邊沿變得平緩。
基于以上三點,一般選取上拉阻值為1K-10K。
三、上拉阻值的計算
OC門輸出高電平時是一個高阻態,其上拉電流要由上拉電阻來提供,設輸入端每端口不大于100uA,設輸出口驅動電流約500uA,標準工作電壓是5V,輸入口的高低電平門限為0.8V(低于此值為低電平);2V(高電平門限值)。
選上拉電阻時:
500uA x 8.4K= 4.2即選大于8.4K時輸出端能下拉至0.8V以下,此為最小阻值,再小就拉不下來了。如果輸出口驅動電流較大,則阻值可減小,保證下拉時能低于0.8V即可。
當輸出高電平時,忽略管子的漏電流,兩輸入口需200uA
200uA x15K=3V即上拉電阻壓降為3V,輸出口可達到2V,此阻值為最大阻值,再大就拉不到2V了。選10K可用。COMS門的可參考74HC系列
設計時管子的漏電流不可忽略,IO口實際電流在不同電平下也是不同的,上述僅僅是原理,一句話概括為:輸出高電平時要喂飽后面的輸入口,輸出低電平不要把輸出口喂撐了(否則多余的電流喂給了級聯的輸入口,高于低電平門限值就不可靠了)
在數字電路中不用的輸入腳都要接固定電平,通過1k電阻接高電平或接地。
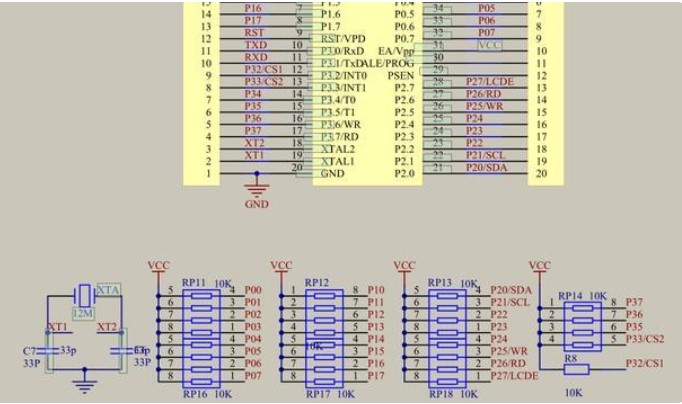
四、51型單片機IO口
AVR的IO是真正雙向IO結構,由于大部分網友都是從標準51轉過來的,受標準51的準雙向IO和布爾操作概念影響,沒能掌握AVR的IO操作,所以有必要撰文說明一下
其實采用真正雙向IO結構的新型MCU很多,常用的有 增強型51,PIC,AVR等,
先簡單的回顧一下標準51的準雙向IO結構
這種準雙向IO結構的特點是
1 輸出結構類似 OC門,輸出低電平時,內部NMOS導通,驅動能力較強(800uA);輸出高電平靠內部上拉電阻,驅動能力弱(60uA)。
2永遠有內部電阻上拉(P0口除外),高電平輸出電流能力很弱,所以即使IO口長時間短路到地也不會損壞IO口
(同理,IO口低電平輸出能力較強,作低電平輸出時不能長時間短路到VCC)
3作輸出時,輸出低電平可以推動LED(也是很弱的),輸出高電平通常需要外接緩沖電路(所以LED多為共陽接法)
五、AVR單片機IO口(千呼萬喚始出來)
端口引腳配置
DDxn PORTxn PUD (in SFIOR) I/O 上拉電阻 說明
0 0 X 輸入 No 高阻態 (Hi-Z)
0 1 0 輸入Yes 被外部電路拉低時將輸出電流
0 1 1 輸入 No 高阻態(Hi-Z)
1 0 X 輸出 No 輸出低電平 ( 漏電流)
1 1 X 輸出 No 輸出高電平 ( 源電流)
//////////////////////////////////////////
輸入狀態:
一、上拉輸入狀態:
1、在IO口線懸空時讀入PINxn的值為1,狀態穩定
2、在IO口線外接輸入信號時讀入PINxn的值隨外部信號高低電平變化而變化
二、高阻輸入狀態:
1、在IO口線懸空時讀入PINxn的值為0,且極易受到干撓,狀態很不穩定
2、外接上拉電阻,在IO口線外接輸入信號時讀入PINxn的值隨外部信號高低電平變化而變化(等同于內接上拉電阻)
輸出狀態:
在輸出狀態下,PORTxn=0則輸出為低電平,PORTxn=1則輸出為高電平
1、輸出低電平,IO口線懸空時讀入PINxn的值為0
2、輸出低電平,IO口線連接VCC或強上拉(指上拉阻值很小,相當于直接連接VCC,能提供足夠的上拉電流)時讀入PINxn的值為1
3、輸出高電平,IO口線懸空時讀入PINxn的值為1
4、輸出高電平,IO口線連接GND或強下拉(指下拉阻值很小,相當于直接連接GND,能吸收足夠的下拉電流)時讀入PINxn的值為0
由于無論如何配置DDRxn,我們都可以讀取PINxn值,綜上所述,我們在讀取PINxn的值時,要想獲得正確且穩定的值,
應該選擇在內部上拉輸入或高阻輸入且外部上拉這兩種方式中進行。當然在選擇內部上拉輸入且外部也上拉的方式也是
可以的,只是內部和外部都加上拉(重復上拉)沒有什么意義。
還有一點就是我們在讀取軟件賦予的電平時,讀PINxn值之前,要插入一個NOP。
也就是說在IO口輸出邏輯電平之后再讀入這個輸出的值中間應插入一個NOP。
AVR的真正雙向IO結構就復雜多了,單是控制端口的寄存器也有4個
PORTx.DDRx,PINx,SFIOR(PUD位),不過功能也強勁多了
作為通用數字I/O 使用時,所有AVR I/O 端口都具有真正的讀- 修改- 寫功能。
這意味著用SBI 或CBI 指令改變某些管腳的方向( 或者是端口電平、禁止/ 使能上拉電阻) 時不會無意地改變其他管腳的方向( 或者是端口電平、禁止/ 使能上拉電阻)。
輸出緩沖器具有對稱的驅動能力,可以輸出或吸收大電流,直接驅動LED。
所有的端口引腳都具有與電壓無關的上拉電阻。
并有保護二極管與VCC 和地相連。
* (很多數字器件都有保護二極管,在低功耗應用時要考慮保護二極管的電流倒灌的影響)
每個端口都有三個I/O 存儲器地址:
數據寄存器 –PORTx
數據方向寄存器–DDRx
端口輸入引腳 –PINx。
數據寄存器PORTx和數據方向寄存器DDRx為讀/ 寫寄存器,而端口輸入引腳PINx為只讀寄存器。
但是需要特別注意的是,對PINx 寄存器某一位寫入邏輯"1“ 將造成數據寄存器相應位的數據發生"0“ 與“1“ 的交替變化。
當寄存器MCUCR 的上拉禁止位PUD置位時所有端口引腳的上拉電阻都被禁止。
在( 高阻態) 三態({DDxn, PORTxn} = 0b00) 輸出高電平({DDxn, PORTxn} = 0b11) 兩種狀態之間進行切換時,
上拉電阻使能({DDxn, PORTxn} = 0b01) 或輸出低電平({DDxn,PORTxn} = 0b10) 這兩種模式必然會有一個發生。
通常,上拉電阻使能是完全可以接受的,因為高阻環境不在意是強高電平輸出還是上拉輸出。
如果使用情況不是這樣子,可以通過置位SFIOR 寄存器的PUD 來禁止所有端口的上拉電阻。
在上拉輸入和輸出低電平之間切換也有同樣的問題。
用戶必須選擇高阻態({DDxn,PORTxn} = 0b00) 或輸出高電平({DDxn, PORTxn} = 0b10) 作為中間步驟。










 工商網監
工商網監
評論