 電子發(fā)燒友App
電子發(fā)燒友App


到 2035 年,全球每年將消耗超過 35 萬億千瓦時的電力,高于 2015 年的不到 21 萬億千瓦時。如今,工業(yè)生產(chǎn)中使用的電機所需電能的近三分之一。其中許多電機基于簡單的交流設(shè)計,因為它們成本相對較低且易于驅(qū)動。它們在能源使用方面也非常低效,特別是在低速時。然而,這樣的交流電機并不是天生的浪費。通過正確的電子控制形式,它們的效率可以顯著提高。使用當今可用的控制技術(shù),可以將給定工作水平的能耗降低多達 60%。
今天使用的最簡單的控制技術(shù)是每赫茲的伏特。它在概念上既簡單又易于在基本的微控制器上實現(xiàn)。核心算法利用了交流電機設(shè)計的核心特性。每個電機都有一個特征磁化電流和產(chǎn)生的最大磁通和轉(zhuǎn)矩。這些特性與每赫茲的伏特比有關(guān)。電機通過圍繞轉(zhuǎn)動機械負載的移動轉(zhuǎn)子布置的定子線圈的切換來轉(zhuǎn)動。在線圈之間切換會迫使轉(zhuǎn)子的磁化元件同步轉(zhuǎn)動,以移動到磁場保持平衡的穩(wěn)定狀態(tài)。
線圈切換頻率的增加反過來會增加速度。但是,如果供應的電能沒有相應增加,則施加的扭矩會下降。每赫茲電壓控制提供了一種解決問題的簡單方法,方法是隨著頻率的升高增加線路電壓,從而可以將扭矩保持在恒定水平。不幸的是,這種關(guān)系在低速時并不是特別一致。需要更高的電壓才能在低速下保持高扭矩,但效率會下降并增加線圈飽和和過熱的可能性。
磁場定向控制提供了一種優(yōu)化電機控制的方法,特別是在低速時,還提供了使電機定位控制更加精確的能力。這增加了交流電機的整體應用范圍,有助于降低工業(yè)機械的成本以及運營成本。
在磁場定向或磁通矢量控制中,伏特每赫茲控制所暗示的速度和轉(zhuǎn)矩之間的聯(lián)系被打破。磁場定向控制的概念可以使用繞組直流電機模型來表達,其中提供給定子和轉(zhuǎn)子的電流是獨立的。在這個模型中,產(chǎn)生的轉(zhuǎn)矩和磁通可以獨立控制。電機組內(nèi)由電流產(chǎn)生的磁場強度決定了磁通量。提供給轉(zhuǎn)子中電磁繞組的電流控制著轉(zhuǎn)矩——因為磁場試圖將自己調(diào)整到穩(wěn)定狀態(tài)。
直流電機在轉(zhuǎn)子上使用換向器,該換向器執(zhí)行控制定子上的哪些線圈隨時通電的工作。換向器的設(shè)計使得電流切換到機械對齊的繞組,以在該點產(chǎn)生最大扭矩。因此,繞組的管理方式使磁通量發(fā)生變化,以保持轉(zhuǎn)子繞組與定子中產(chǎn)生的磁場正交。
在交流電機中,只有定子電流受到直接控制。轉(zhuǎn)子通常使用永磁體來提供其磁場。這意味著磁通和轉(zhuǎn)矩依賴于相同的電流。但是面向場的控制提供了幾乎獨立地操縱它們的能力。在實踐中,定子磁通是動態(tài)控制的,以提供獨立操縱轉(zhuǎn)矩的能力。通常,可以驅(qū)動定子線圈,以便它們產(chǎn)生扭矩或沿定子軸施加力,這種模式不影響旋轉(zhuǎn)。這些方向分別是正交軸和直軸。為了傳遞運動,每個線圈依次被驅(qū)動以產(chǎn)生高正交力。
幾種數(shù)學變換用于提供電流和電壓變化的能力,以解耦扭矩和磁通量。在磁場定向控制下,流過定子不同部分的電流由一個矢量表示。矩陣投影將三相時間和速度相關(guān)系統(tǒng)轉(zhuǎn)換為兩坐標時不變系統(tǒng)。坐標通常使用符號d和q來描述,它們分別代表通量和轉(zhuǎn)矩分量。在 (d,q) 參考系中,施加的扭矩與扭矩分量呈線性關(guān)系。
在磁場定向控制下,從電機接收電信號并結(jié)合到 (d,q) 坐標模型中。該模型通常是相對于轉(zhuǎn)子計算的,從而更容易計算所需的通量。用于計算的典型方法是配對 Clarke 和 Park 變換。
Clarke 變換從不同相位(通常是三個相位)獲取電流,并使用它們在笛卡爾坐標系中估計電流。這些系統(tǒng)的軸使用符號 alpha 和 beta 而不是傳統(tǒng)的 x 和 y,以減少與空間坐標系混淆的可能性。然后將這些應用于 Park 變換,以提供在旋轉(zhuǎn) (d,q) 坐標系中看到的當前向量。三角函數(shù)提供了轉(zhuǎn)換的核心,需要使用微控制器或數(shù)字信號處理器 (DSP)。
通過 Clarke 和 Park 變換,(d,q) 空間中電流矢量的磁通和轉(zhuǎn)矩分量是從饋入每個電相的電流和轉(zhuǎn)子磁通位置導出的,在大多數(shù)描述中采用符號 theta算法。這種結(jié)構(gòu)適用于一系列電機。逆帕克變換用于產(chǎn)生電壓輸出,然后將其用于控制??三相中每一相的功率的算法中。整體結(jié)構(gòu)如圖1所示。
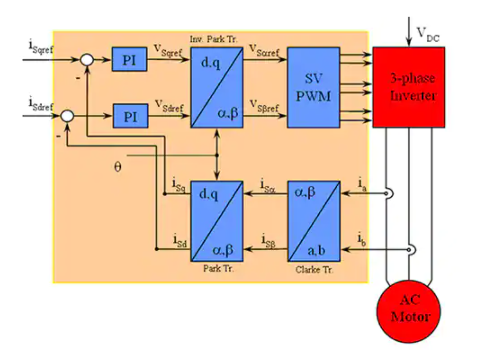
圖 1:用于磁場定向控制的變換和控制塊的基本配置。
通過簡單地改變磁通參考并獲得轉(zhuǎn)子磁通位置,可以使用相同的核心結(jié)構(gòu)來控制同步電機和感應電機。在同步永磁電機中,轉(zhuǎn)子磁通是固定的,因為它由永磁體決定。感應電機需要產(chǎn)生轉(zhuǎn)子磁通才能運行,因此這將作為非零值并入磁通參考中。
磁場定向控制成功的關(guān)鍵是轉(zhuǎn)子磁通位置的實時預測。這種控制策略有一個復雜性。在交流感應電機內(nèi)部,轉(zhuǎn)子的速度與驅(qū)動它的磁通量旋轉(zhuǎn)的速度不匹配。轉(zhuǎn)子往往滯后,導致稱為滑差速度的差異。在舊方案中,電機制造商使用傳感器來分析轉(zhuǎn)子位置,但這會導致不必要的額外成本。在實踐中,可以使用來自電機內(nèi)產(chǎn)生的電壓和電流的反饋來補償滑差。
許多系統(tǒng)使用測量的反電動勢來估計轉(zhuǎn)子滑差。反電動勢電壓的大小與轉(zhuǎn)子的速度成正比。但是,使用該輸入直接在低速或靜止時會導致問題,并且不容易估計初始位置。從未知的轉(zhuǎn)子位置啟動可能會導致電機意外反轉(zhuǎn)一小段距離或完全啟動失敗。簡單地對反電動勢進行采樣的另一個缺點是它對定子電阻的敏感性,定子電阻容易隨溫度變化。
基于間接模型的方案提供了更好的性能。計算開銷和性能之間存在很大的權(quán)衡,但總的來說,通過使用更復雜的基于模型的算法可以提高效率,尤其是在低速時。基于模型的間接方案根據(jù)可用的傳感器讀數(shù)估計這些的實時值。
與反電動勢估計一樣,核心問題是確定電機的起點。一種解決方案是從初始狀態(tài)的估計開始,從該初始狀態(tài)可以推導出預測輸出的向量,并將其與測量的輸出向量進行比較。該差異用于校正模型的內(nèi)部狀態(tài)向量。但是,噪聲會破壞模型的穩(wěn)定性。
擴展卡爾曼濾波器可以補償噪聲和突發(fā)干擾的影響。卡爾曼濾波器的架構(gòu)允許被認為具有較低不確定性的更新被賦予比估計具有更大不確定性的更新更高的權(quán)重。過濾器以遞歸方式工作,因此每次估計只需要一組新讀數(shù)和過濾器的先前狀態(tài)即可生成新狀態(tài)。
卡爾曼濾波器采用兩個主要階段:預測和更新。在預測階段,濾波器根據(jù)前一個狀態(tài)計算系統(tǒng)的下一個狀態(tài),在運動算法的情況下,它提供最后已知的速度和加速度值。由此,過濾器計算當前位置的預測。
在更新階段,將新采樣的電壓和電流值與其預測值進行比較。輸入數(shù)據(jù)與預測越接近,錯誤概率越低。這個錯誤概率反饋到卡爾曼濾波器增益中。在算法級別,卡爾曼濾波器依賴于許多矩陣乘法和求逆。因此,在電機控制中實現(xiàn)擴展卡爾曼濾波器的關(guān)鍵是高算術(shù)性能,與磁場定向控制的其他方面相同。
為了在實時電機控制情況下實現(xiàn)每秒所需的許多算術(shù)運算,需要高性能的 MCU 或 DSP。德州儀器 ( Texas Instruments ) 生產(chǎn)的TMS320F2833x 系列器件旨在處理交流電機應用的典型計算負載,并由各種片上外圍設(shè)備支持,以幫助與電源轉(zhuǎn)換電子設(shè)備集成。
TMS320F2833x 圍繞具有浮點支持的高性能 32 位 CPU 構(gòu)建,符合 IEEE754 單精度算術(shù)標準。通過實施符合 IEEE 標準的浮點單元,TMS320F2833x 簡化了算法開發(fā),因為它可以處理非常寬的數(shù)字范圍,并內(nèi)置支持非數(shù)字 (NaN) 和除零條件等錯誤。與雙 16 x 16 乘加 (MAC) 單元耦合的哈佛架構(gòu)為基于矩陣和投影的運算提供了高吞吐量。為了提高精度,這些單元可以連接在一起以執(zhí)行 32 x 32 MAC。片上外設(shè)包括一個 16 通道模數(shù)轉(zhuǎn)換器 (ADC),用于對來自電機的電壓和電流反饋信號進行采樣。
作為 C2000 系列 DSP 增強型 MCU 的成員,TMS320F2833x 得到 TI 數(shù)字電機控制庫的支持,該庫提供可重復使用的可配置軟件塊來實施各種控制策略。該庫由表示為塊的函數(shù)組成,除了用于閉環(huán)操作的控制塊和用于脈沖寬度調(diào)制 (PWM) 等功能的外圍驅(qū)動程序之外,這些函數(shù)還提供 Clarke 和 Park 等變換。
在電機控制情況下,PWM 輸出控制六個功率晶體管,它們共同向三個電氣相位提供電壓和電流。每個相位都使用半橋晶體管配置。在這些情況下用于控制的常用算法是空間矢量 PWM。與更簡單的 PWM 技術(shù)相比,這減少了諧波,并采用了八種開關(guān)狀態(tài)。有六個活動狀態(tài)和兩個零狀態(tài),每個狀態(tài)都是八個對應空間向量的目標狀態(tài)。這些狀態(tài)以這樣一種方式排列,即兩組互補狀態(tài)在任何時候都處于活動狀態(tài)。一組用于三個高側(cè)功率晶體管,另一組用于低側(cè)。該算法循環(huán)通過狀態(tài)以根據(jù)磁場定向控制模型的要求將電源切換到狀態(tài)。TMS320F2833x 包括適用于采用空間矢量開關(guān)的軟件控制的 PWM 硬件。總共 18 個 PWM 輸出中有 6 個支持高精度控制,分辨率為 150 ps。結(jié)果是一個數(shù)字控制器,需要相對較少的外部硬件來管理功率晶體管,如圖 2 所示。
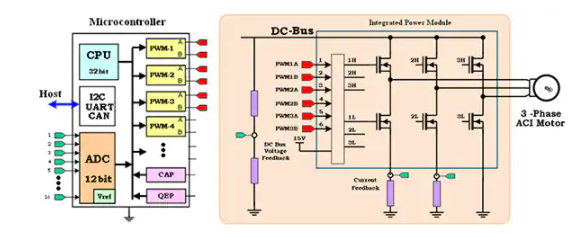
圖 2:框圖,顯示了 F2833x 的 PWM 輸出對電源相位的控制。
結(jié)論
利用具有必要核心和高性能構(gòu)建塊的微控制器,結(jié)合 TI 數(shù)字電機控制庫,設(shè)計人員可以驅(qū)動新一代高效交流電機。















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論