本文針對(duì)無人飛行器高空飛行時(shí)機(jī)翼前緣等關(guān)鍵部位出現(xiàn)的結(jié)冰問題,提出了一種基于FPGA的無人飛行器溫度巡檢裝置的設(shè)計(jì)方案,方案利用FPGA并結(jié)合鉑電阻傳感器PT100實(shí)現(xiàn)對(duì)無人機(jī)各部分尤其是機(jī)翼前緣
2014-02-11 11:51:09 1127
1127 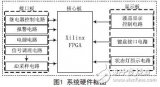
了直升機(jī)的垂直升降的飛行性能,同時(shí)也在一定程度上降低了飛行器機(jī)械結(jié)構(gòu)的設(shè)計(jì)難度。四軸飛行器的平衡控制系統(tǒng)由各類慣性傳感器組成。在制作過程中,對(duì)整體機(jī)身的中心、對(duì)稱性以及電機(jī)性能要求較低,這也正是制作四軸飛行器的優(yōu)
2017-12-13 09:52:3016376 放暑假了閑來無事想做飛行器。有那個(gè)大神用msp430做過四軸飛行器啊,求指點(diǎn)啊,求幫助,求資料,各種求啊
2013-07-11 11:00:03
系統(tǒng)分成控制模塊和執(zhí)行模塊。控制模塊是一個(gè)遙控器,安芯一號(hào)作為主控芯片。按鍵來控制飛行器的運(yùn)動(dòng),包括懸空,上升,下降,水平4個(gè)方向的運(yùn)動(dòng)。單片機(jī)直接與無線串口模塊進(jìn)行通信,把指令直接通過串口拋數(shù)據(jù)給
2013-11-03 23:25:05
在無人機(jī)飛行控制系統(tǒng)中,飛行控制器是其核心部件,它負(fù)責(zé)飛行控制系統(tǒng)信號(hào)的采集、控制律的解算、飛機(jī)的姿態(tài)和速度,以及與地面設(shè)備的通訊等工作。隨著無人機(jī)越來越廣泛的應(yīng)用,它所完成的任務(wù)也越來越復(fù)雜,對(duì)無人機(jī)的機(jī)動(dòng)性要求也越來越高,這就要求無人機(jī)的控制核心向高集成度和小型化方向發(fā)展。
2019-10-22 07:58:23
深圳市拓天騰飛科技有限公司專業(yè)生產(chǎn)無人機(jī)、航模、多軸飛行器的電機(jī),聯(lián)系qq 239396310
2017-07-05 18:05:24
如何去實(shí)現(xiàn)基于STM32F103CBT6微型四旋翼飛行器的硬件設(shè)計(jì)呢?如何去實(shí)現(xiàn)基于STM32F103CBT6微型四旋翼飛行器的件軟設(shè)計(jì)呢?
2021-12-20 07:07:33
求飛行器PCB圖,想自己制作一個(gè)簡易飛行器
2015-09-26 20:19:52
本帖最后由 tabwen 于 2015-11-30 20:19 編輯
求四軸飛行器方案,有意請(qǐng)站內(nèi)聯(lián)系或聯(lián)系*** 文先生
2015-11-30 20:18:16
本人小白想做個(gè)微型四軸飛行器,想請(qǐng)教各位大神微型四軸飛行器的教程,還有配件清單,謝謝
2016-04-19 14:54:25
飛行控制系統(tǒng),自行下載
2016-08-17 12:03:33
領(lǐng)域…… 無人飛行器框圖: 一、安全通信(數(shù)據(jù)鏈)RF(Datalink)①ADF7242:低功耗IEEE 802.15.4/專有GFSK/FSK零中頻2.4 GHZ收發(fā)器IC一款高度集成的低功耗
2018-10-15 09:10:14
的DIY給我們提供了另外一種思路,在這個(gè)四軸飛行器上MSP430并不進(jìn)行平衡算法的計(jì)算,而是將當(dāng)前的運(yùn)行數(shù)據(jù)通過無線發(fā)送給PC,PC再計(jì)算出必要的動(dòng)作回傳給飛行器,MSP430根據(jù)回傳的數(shù)據(jù)作出動(dòng)作。轉(zhuǎn)自:http://bbs.eeworld.com.cn/viewthread.php?tid=320222
2012-03-14 17:54:53
四軸飛行器.pdf 四旋翼飛行器設(shè)計(jì)與穩(wěn)定控制研究.pdf (四軸飛行器)德國開源代碼的理解.pdf 四軸飛行器研究與設(shè)計(jì).pdf 一種基于STM32的四旋翼飛行器控制器.pdf
2018-06-28 11:03:39
多多支持四軸飛行器.pdf 四旋翼飛行器設(shè)計(jì)與穩(wěn)定控制研究.pdf (四軸飛行器)德國開源代碼的理解.pdf 四軸飛行器研究與設(shè)計(jì).pdf 一種基于STM32的四旋翼飛行器控制器.pdf
2018-07-05 07:54:18
”,創(chuàng)造出更多的創(chuàng)意作品。 下面是華強(qiáng)芯城給大家提供的一種基于 Atmel ATSAM4S16-AU 的四軸飛行器解決方案,期待能帶給有需要的朋友們,華強(qiáng)芯城也需要通過提供這些一個(gè)方案解決平臺(tái),幫助大家
2016-05-13 15:51:34
和IIC接口;(5)、3路AD轉(zhuǎn)換;(6)、充足的I/O 口;(7)、足夠的FLASH和RAM空間;(8)、一定的浮點(diǎn)運(yùn)算能力和較強(qiáng)的數(shù)據(jù)處理能力; 二,軟件部分 姿態(tài)檢測性能測試飛行器控制系統(tǒng)采集到
2016-05-23 15:41:22
申請(qǐng)理由:在開發(fā)四涵道飛行器時(shí),采用的STM32F4進(jìn)行飛行控制算法編程,還沒做過在嵌入式操作系統(tǒng)下的開發(fā)。知道致遠(yuǎn)電子的這個(gè)開發(fā)板免費(fèi)申請(qǐng)活動(dòng),因此,想申請(qǐng)一塊開發(fā)版,設(shè)計(jì)一個(gè)四涵道的飛行控制系統(tǒng)
2015-10-23 10:14:30
,并學(xué)習(xí)研究相關(guān)編程控制的實(shí)現(xiàn)。(2)主要任務(wù)是利用altium designer設(shè)計(jì)硬件控制系統(tǒng),利用keil C編寫改進(jìn)相應(yīng)的軟件控制程序。(3)設(shè)計(jì)飛行器控制板1套,編寫C代碼5000余行,基本實(shí)現(xiàn)了飛行器各個(gè)傳感器的功能。
2015-10-23 10:13:19
等6種基本運(yùn)動(dòng)狀態(tài),利用陀螺儀進(jìn)行物體姿態(tài)檢測,利用智能傳感器技術(shù)和GPS全球衛(wèi)星定位系統(tǒng)使飛行器在無人操控的情況下實(shí)現(xiàn)智能化自主導(dǎo)航、自動(dòng)返航、地理圍欄等功能。
2015-07-07 10:40:09
申請(qǐng)理由:一直在做四軸飛行器的設(shè)計(jì),有著很好的開發(fā)經(jīng)驗(yàn),而這塊開發(fā)板的傳感器恰好符合我的需求項(xiàng)目描述:以stm32作為主控 六軸陀螺儀的到飛行器姿態(tài) 氣壓計(jì)獲取飛行器高度 磁力機(jī)獲取其方向 而藍(lán)牙通過與手機(jī)連接通信 從而控制飛行器 姿態(tài)算法采用四元算法和互補(bǔ)濾波 控制直接用單級(jí)pid 簡單暴力
2016-01-26 13:59:13
般的飛行器有一定的區(qū)別,四旋翼飛行器的控制系統(tǒng)包括姿態(tài)控制、速度控制和軌跡控制,而姿態(tài)控制是整個(gè)飛行控制的核心。姿態(tài)控制策略的優(yōu)劣直接影響速度控制和軌跡控制的品質(zhì)。目前的四旋翼飛行器有多種適合的控制算法,如
2018-10-24 17:24:21
等6種基本運(yùn)動(dòng)狀態(tài),利用陀螺儀進(jìn)行物體姿態(tài)檢測,利用智能傳感器技術(shù)和GPS全球衛(wèi)星定位系統(tǒng)使飛行器在無人操控的情 況下實(shí)現(xiàn)智能化自主導(dǎo)航、自動(dòng)返航、地理圍欄等功能。
2015-08-04 16:08:39
,使其發(fā)展趨于無人機(jī),智能機(jī)器人。四軸飛行器不但實(shí)現(xiàn)了直升機(jī)的垂直升降的飛行性能,同時(shí)也在一定程度上降低了飛行器機(jī)械結(jié)構(gòu)的設(shè)計(jì)難度。四軸飛行器的平衡控制系統(tǒng)由各類慣性傳感器組成。在制作過程中,對(duì)整體機(jī)身
2015-08-11 10:00:45
MICOKIt主板系統(tǒng)的控制下,四旋翼飛行器在飛行時(shí)能夠更加穩(wěn)定。同時(shí)我會(huì)把測試結(jié)果反饋給貴公司。項(xiàng)目描述:基于物聯(lián)網(wǎng)的四旋翼飛行器,是以四旋翼飛行器為主體,其帶有主控制芯片、傳感器和信號(hào)發(fā)送模塊等
2015-07-31 21:17:45
申請(qǐng)理由:為了滿足四旋翼飛行器的設(shè)計(jì)要求,設(shè)計(jì)了微控制器為核心的控制系統(tǒng)和算法。首先進(jìn)行各單元電路方案的比較論證,確定了硬件設(shè)計(jì)方案。四旋翼飛行器采用了固連在剛性十字架交叉結(jié)構(gòu)的4個(gè)電機(jī)驅(qū)動(dòng)的一種
2015-07-14 10:52:35
小型化,并融入了人工智能,使其發(fā)展趨于無人機(jī),智能機(jī)器人。四軸飛行器不但實(shí)現(xiàn)了直升機(jī)的垂直升降的飛行性能,同時(shí)也在一定程度上降低了飛行器機(jī)械結(jié)構(gòu)的設(shè)計(jì)難度。四軸飛行器的平衡控制系統(tǒng)由各類慣性傳感器組成。在
2015-08-11 10:38:55
幸得到,我們也會(huì)大量在我們學(xué)校科協(xié)宣傳貴公司的產(chǎn)品,實(shí)現(xiàn)互惠!謝謝!項(xiàng)目描述:項(xiàng)目名稱 : 大學(xué)生創(chuàng)新實(shí)驗(yàn), 基于四軸無人飛行器的環(huán)境偵查系統(tǒng)設(shè)計(jì)我們打算將該項(xiàng)目分為:四軸平臺(tái)的搭建,語音控制四軸飛行器
2015-07-24 18:42:59
的單片機(jī),我想那一定非常炫,如果單片機(jī)有了系統(tǒng)的話,我想對(duì)圖像處理會(huì)更加流暢,快速。剛好我們和老師正在做基于四軸無人飛行器環(huán)境偵查系統(tǒng),希望借此機(jī)會(huì)能好好探索下帶系統(tǒng)的OK210,希望給我次機(jī)會(huì)。謝謝項(xiàng)目
2015-08-04 12:24:24
、監(jiān)督、檢查(如地雷探測)等任務(wù),可以勝任需要冒險(xiǎn)近地飛行或靠近其他物體的飛行任務(wù),不像有人飛行器那樣給飛行員安全帶來威脅。當(dāng)無人飛行器低速飛行或懸停于特定目標(biāo)上空時(shí),對(duì)于低成本的慣導(dǎo)系統(tǒng)(INS)或
2015-09-10 11:10:13
開發(fā)板,然而沒有合適的板子,看到這款板子大家一致認(rèn)為可以嘗試用一下,特此申請(qǐng)項(xiàng)目描述:通過陀螺儀,采集無人機(jī)的姿態(tài)數(shù)據(jù),計(jì)算控制量并輸出到舵機(jī)等執(zhí)行機(jī)構(gòu),接受地面站的指令并傳輸無人飛行器的位置等信息。利用設(shè)計(jì)的控制板進(jìn)行伺服控制算法的實(shí)現(xiàn),完成對(duì)執(zhí)行機(jī)構(gòu)舵機(jī)的控制
2015-09-10 11:18:57
項(xiàng)目名稱:基于自主目標(biāo)跟蹤的無人機(jī)飛行控制系統(tǒng)試用計(jì)劃:申請(qǐng)理由本人具有三年的嵌入式設(shè)計(jì)和開發(fā)的相關(guān)工程經(jīng)驗(yàn),曾自主完成了四旋翼飛行器的飛行控制系統(tǒng)的軟硬件設(shè)計(jì),并對(duì)計(jì)算機(jī)圖像標(biāo)定技術(shù),圖像識(shí)別
2019-07-03 10:47:45
,并融入了人工智能,使其發(fā)展趨于無人機(jī),智能機(jī)器人。四軸飛行器不但實(shí)現(xiàn)了直升機(jī)的垂直升降的飛行性能,同時(shí)也在一定程度上降低了飛行器機(jī)械結(jié)構(gòu)的設(shè)計(jì)難度。四軸飛行器的平衡控制系統(tǒng)由各類慣性傳感器組成。在
2015-08-11 10:30:35
申請(qǐng)理由:我們是在校大學(xué)生科研興趣團(tuán)隊(duì),正在設(shè)計(jì)制作四軸無人 項(xiàng)目。現(xiàn)在四軸無人機(jī)一般通過遙控器或者電腦上位機(jī)控制飛行。所以,我們希望通過申請(qǐng)藍(lán)牙開發(fā)套件,用手機(jī)藍(lán)牙控制四軸飛行器的運(yùn)行,對(duì)飛行器
2015-10-09 14:16:12
飛行器的螺旋槳與空氣發(fā)生相對(duì)運(yùn)動(dòng),產(chǎn)生了向上的升力,當(dāng)升力大于四軸的重力時(shí)四軸就可以起飛了。四軸飛行器飛行過程中如何保持水平:我們先假設(shè)一種理想狀況:四個(gè)電機(jī)的轉(zhuǎn)速是完全相同的是不是我們控制四軸飛行器
2019-07-14 05:00:00
四軸飛行器的結(jié)構(gòu)是如何構(gòu)成的?四軸飛行器的基本飛行原理是什么?一種基于四軸飛行器的雙閉環(huán)PID控制算法
2021-05-19 06:20:42
一 任務(wù)及設(shè)計(jì)要求1.1任務(wù)模擬飛行器(如無人機(jī)、導(dǎo)彈等)在空中飛行過程中使用九軸加速度/陀螺儀/磁力計(jì)模塊采集姿態(tài)信息;并且能使用攝像頭模塊采集圖像信息實(shí)現(xiàn)目標(biāo)檢測功能,從而實(shí)現(xiàn)飛行器朝目標(biāo)飛行
2021-08-09 06:15:54
四軸飛行器的發(fā)展背景;四軸飛行器的研究現(xiàn)狀;四軸飛行器的研究意義;哪位大神知道的說下,想了解啊
2012-07-27 14:09:48
了一種數(shù)字式飛行控制系統(tǒng)的總體結(jié)構(gòu)。飛行控制計(jì)算機(jī)是四旋翼飛行器自動(dòng)駕駛儀的基本組成部件。采用模塊化設(shè)計(jì)思想,設(shè)計(jì)開發(fā)一種基于PIC32 高性能單片機(jī)為核心的飛行控制計(jì)算機(jī)。四旋翼飛行器采用對(duì)稱分布
2019-04-05 07:00:00
一種基于PLC的智能鉗型吊電氣控制系統(tǒng)的設(shè)計(jì)方案
2021-05-07 07:07:42
`一.四旋翼飛行器簡介四旋翼飛行器,又稱為四旋翼直升機(jī),顧名思義,是一種具備4個(gè)螺旋槳的飛行器,與直升機(jī)類似,可以完成空中懸停、飛行的動(dòng)作。傳統(tǒng)直升機(jī)會(huì)用一個(gè)主槳來產(chǎn)生推力,用一個(gè)尾槳來抵消主槳產(chǎn)生
2015-10-23 11:30:24
重力和螺旋槳拉力5、螺旋槳1、3為逆時(shí)針轉(zhuǎn)動(dòng),螺旋槳2、4為順時(shí)針轉(zhuǎn)動(dòng)多旋翼建模流程圖一、動(dòng)力單元模型二、控制效率模型CT是螺旋槳拉力系數(shù),CM是螺旋槳轉(zhuǎn)矩系數(shù)。三、剛體模型預(yù)備知識(shí):一、旋轉(zhuǎn)矩陣1、旋轉(zhuǎn)矩陣改變向量表達(dá)形式的目的在于:在地球坐標(biāo)系下表示四旋翼飛行器的
2021-09-15 07:22:37
四旋翼微型飛行器是一種以4個(gè)電機(jī)作為動(dòng)力裝置.通過調(diào)節(jié)電機(jī)轉(zhuǎn)速來控制飛行的欠驅(qū)動(dòng)系統(tǒng);為了實(shí)現(xiàn)四旋翼微型飛行器的自主飛行控制,對(duì)飛行控制系統(tǒng)進(jìn)行了初步設(shè)計(jì),并且以C8051F020單片機(jī)為計(jì)算控制
2013-11-28 09:29:12
是一種六自由度的垂直起降機(jī),因此非常適合靜態(tài)和準(zhǔn)靜態(tài)條件下飛行。但是四旋翼飛行器只有四個(gè)輸入力,同時(shí)卻有六個(gè)狀態(tài)輸出,所以它又是一種欠驅(qū)動(dòng)系統(tǒng)。 控制航行姿態(tài)的依據(jù)就是航姿傳感器輸出的信號(hào)。航姿傳感器
2019-02-18 15:02:22
]采用OpenMV制作了全自動(dòng)模擬目標(biāo)搜救系統(tǒng),為飛行器追蹤地面移動(dòng)目標(biāo)提供了新方案。要完成飛行器對(duì)地面移動(dòng)目標(biāo)的快速追蹤,需滿足以下要求:首先,飛行器本身運(yùn)動(dòng)控制須非常靈活,響應(yīng)迅速,滯后少;接著
2018-12-03 19:35:50
stm32做四軸飛行器難度很大嗎
2017-03-20 22:13:59
上位機(jī)傳給四軸飛行器一段航線四軸飛行器怎么按航線運(yùn)動(dòng)求類似代碼最好有l(wèi)abview實(shí)現(xiàn)的航線規(guī)劃
2014-05-21 20:45:12
我想編寫一個(gè)四軸飛行器的程序應(yīng)該怎么辦,求大神幫助
2016-05-08 11:35:30
`通過學(xué)習(xí)這個(gè)課程了解四周飛行器的原理,知其然并知其所以然。不光可以做四周飛行器還可以做智能家居系統(tǒng)、智能農(nóng)業(yè)檢測、智能物流倉儲(chǔ)系統(tǒng)、安防監(jiān)控系統(tǒng)、智能穿戴、智能機(jī)器人小車、無人機(jī)等項(xiàng)目。 一
2018-01-02 16:16:52
四軸飛行器教程四軸飛行器教程 四軸入門超詳細(xì)的好文檔【INF】BlackHole1開發(fā)手冊(cè) 四軸開發(fā)思路及方案
2019-01-15 15:16:58
四軸飛行器的硬件,一般分為兩大類,一類是使用空心杯電機(jī)的微型四軸,一種是使用無刷電機(jī)的四軸飛行器,體積較使用空心杯的微型四軸要大很多。空心杯四軸:該四軸一般直接用PCB做機(jī)架,玩具廠家也會(huì)開模
2021-09-13 07:37:28
四軸飛行器的結(jié)構(gòu)原理 四軸飛行器,又稱四旋翼飛行器、四旋翼直升機(jī),簡稱四軸、四旋翼。這四軸飛行器(Quadrotor)是一種多旋翼飛行器。四軸飛行器的四個(gè)螺旋槳都是電機(jī)直連的簡單機(jī)構(gòu),十字形的布局
2016-01-15 16:42:28
`一.固定翼飛行器簡介固定翼飛行器,又稱為固定翼直升機(jī),顧名思義,是一種具備4個(gè)螺旋槳的飛行器,與直升機(jī)類似,可以完成空中懸停、飛行的動(dòng)作。傳統(tǒng)直升機(jī)會(huì)用一個(gè)主槳來產(chǎn)生推力,用一個(gè)尾槳來抵消主槳產(chǎn)生
2015-10-23 11:21:59
本人最近參加虛擬儀器大賽,用FPGA實(shí)現(xiàn)飛行器的控制,該怎么寫?求大神指教!
2014-11-19 19:09:51
如何利用51單片機(jī)去制作一種微型四軸飛行器呢?
2021-12-20 06:48:50
四旋翼的工作原理是什么?四旋翼飛行器是由哪些部分組成的?如何去實(shí)現(xiàn)一種四旋翼飛行器的設(shè)計(jì)呢?
2021-11-11 08:01:28
四旋翼自主飛行器是由哪些模塊組成的?如何去實(shí)現(xiàn)一種四旋翼自主飛行器的設(shè)計(jì)呢?
2021-11-12 06:20:09
四軸飛行器的硬件設(shè)計(jì)包括哪些呢?如何去實(shí)現(xiàn)一種四軸飛行器的硬件設(shè)計(jì)呢?
2021-12-20 07:23:57
1.對(duì)于飛行器上的多電機(jī)控制,選用FPGA/ARM哪一種更好?而且要具有網(wǎng)絡(luò)通信功能。2.如果對(duì)于將來的就業(yè)前景來講,F(xiàn)PGA/ARM哪一種比較好?多謝了
2017-03-06 10:40:57
作者:紅桃K 0 引言 微型飛行器(Micro Air Vehicle,簡稱MAV)是20世紀(jì)90年代發(fā)展起來的一種新型飛行器。根據(jù)美國國防高級(jí)研究計(jì)劃局(DARPA)的定義,微型飛行器
2021-09-13 08:29:01
本文描述了一個(gè)簡易四軸飛行器系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn),整個(gè)方案分為遙控控制板各飛行控制板兩部分,通過2.4G無線模塊進(jìn)行控制通信,飛控系統(tǒng)采用IMU系統(tǒng)獲取姿態(tài)信息根據(jù)反饋控制算法進(jìn)行電機(jī)控制從而實(shí)現(xiàn)飛行控制
2021-03-04 06:03:00
模擬飛行器系統(tǒng)的原理框圖及模塊作用是什么?怎樣去設(shè)計(jì)一種基于STM32F427+K210開發(fā)板的模擬飛行器?
2021-11-15 07:31:17
怎樣去使用STMF103的處理器和外設(shè)呢?怎樣去設(shè)計(jì)一種基于STMF103處理器的微型四軸飛行器呢?
2021-11-09 07:07:08
復(fù)雜,不易操作等原因,四旋翼飛行器的發(fā)展一直都比較緩慢。直到20世紀(jì)90年代之后,隨著微機(jī)電系統(tǒng)(MEMS)和微慣性(MIMU)以及飛行控制等技術(shù)研究的成熟,多旋翼飛行器的自動(dòng)控制器出現(xiàn)了。只需等待速度...
2021-08-06 08:22:07
利用LabVIEW(或其他軟件)實(shí)現(xiàn)地面控制站的人機(jī)接口程序;實(shí)現(xiàn)在線飛行狀態(tài)監(jiān)測、顯示飛行數(shù)據(jù)和報(bào)警信息;實(shí)現(xiàn)地面站對(duì)無人機(jī)的控制接口,包括命令控制臺(tái)、飛行參數(shù)顯示、無人機(jī)飛行航跡顯示,并能根據(jù)任務(wù)對(duì)航跡進(jìn)行實(shí)時(shí)規(guī)劃;還要能利用3D模型動(dòng)態(tài)顯示飛行器的情況
2013-05-12 22:14:13
比較麻煩,基于模型的控制算法的通病就是模型一旦差別較大,控制效果不如意,反而還是PID簡單明了。但是為了達(dá)到更高精度的控制性能,建模分析是非常必要的。四軸飛行器是一個(gè)欠驅(qū)動(dòng)系統(tǒng),模型方程是一組非線性方程,給
2019-08-06 17:12:20
四軸飛行器電源控制采用的什么機(jī)制?
2023-10-08 10:18:22
飛行器的旋翼效率相對(duì)很低,從單個(gè)旋翼上增加拉力的空間是非常有限的,所以采用多旋翼結(jié)構(gòu)形式無疑是一種提高四旋翼飛行器負(fù)載能力的最有效手段之一。至于四旋翼結(jié)構(gòu)存在控制量較多的問題,則有望通過設(shè)計(jì)自動(dòng)飛行
2016-08-06 15:19:13
深圳市大疆創(chuàng)新科技有限公司(簡稱DJI),成立于2006年,是全球領(lǐng)先的無人飛行器控制系統(tǒng)級(jí)無人機(jī)解決方案的研發(fā)和生產(chǎn)商,客戶遍布全球40多個(gè)國家。通過持續(xù)的創(chuàng)新,大疆致力于為無人機(jī)工業(yè)、行業(yè)用戶
2013-02-02 14:46:38
本文設(shè)計(jì)了一個(gè)自舉飛行器的微機(jī)控制系統(tǒng)。結(jié)合動(dòng)力學(xué)模型,討論了飛行速度和迎角對(duì)飛機(jī)高度的影響及飛行航向的控制,闡述了飛機(jī)
2009-09-14 08:42:52 14
14 旋翼式微型飛行器升力系統(tǒng)設(shè)計(jì):在綜合分析多種微型飛行器升力系統(tǒng)方案的基礎(chǔ)上,提出了3 種旋翼式微型飛行器的升力系統(tǒng)布局方案. 通過對(duì)其中的雙電動(dòng)機(jī)雙旋翼微型飛行器升力
2009-12-29 23:47:0254 摘要:基于C8051F310單片機(jī)設(shè)計(jì)超小型無人飛行器舵機(jī)控制系統(tǒng)是一種成本低廉、實(shí)現(xiàn)容易的方法。文中介紹了舵機(jī)控制系統(tǒng)的實(shí)現(xiàn)原理并給出了該系統(tǒng)具體的軟硬件設(shè)計(jì),系統(tǒng)在飛
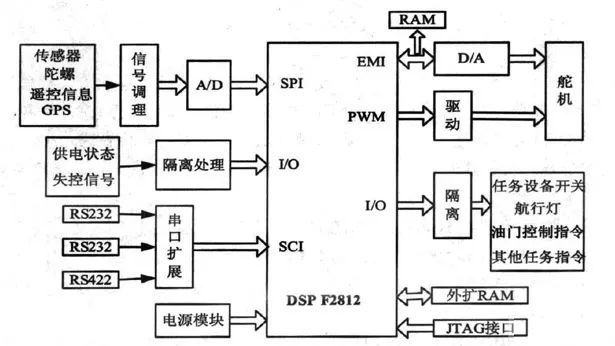
2010-07-16 11:49:01338 研究一種基于TMS320F28335 DSP(Digital Signal Processor)的全數(shù)字飛行器控制系統(tǒng)的硬件設(shè)計(jì),分析了其結(jié)構(gòu)組成:主控制器電路、舵面位置檢測電路和通訊等硬件電路設(shè)計(jì)。經(jīng)過多次試驗(yàn)調(diào)試
2013-04-27 16:52:2268 為滿足無人機(jī)控制律參數(shù)調(diào)節(jié)及后期控制策略優(yōu)化的需要,以某型無人機(jī)為應(yīng)用背景,提出了一種無人機(jī)飛行控制系統(tǒng)地面仿真平臺(tái)的設(shè)計(jì)方案。首先分析了該平臺(tái)的總體設(shè)計(jì)方案,然
2013-05-06 11:15:44136 研究生論文,四軸飛行器,無人機(jī),飛行控制器,嵌入式.
2016-03-21 11:47:4917 本文選擇斜十字飛行器進(jìn)行研究, 首先對(duì)飛行器建模條件進(jìn)行了合理的假設(shè),而后根據(jù)牛頓定律和歐拉方程,建立了一種斜十字四旋翼飛行器的動(dòng)力學(xué)模型。 在此模型的基礎(chǔ)上,設(shè)計(jì)了四旋翼飛行器的控制系統(tǒng), 利用
2016-05-13 11:28:0524 1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文
2016-08-23 17:56:0041 一種基于STM32的四旋翼飛行器控制器
2017-09-25 09:15:3725 隨著航空、航天工業(yè)技術(shù)的迅速發(fā)展,對(duì)飛行器的研制成本和研發(fā)周期要求越來越高,這促進(jìn)了飛行器仿真系統(tǒng)的研制和開發(fā)。飛行仿真轉(zhuǎn)臺(tái)是一個(gè)高精度的隨動(dòng)系統(tǒng),由精密機(jī)械臺(tái)體和高性能的控制系統(tǒng)兩部分組成。 作為
2017-11-16 11:20:087 四軸飛行器又稱四旋翼飛行器、四旋翼直升機(jī),簡稱四軸、四旋翼。這四軸飛行器(Quadrotor)是一種多旋翼飛行器。四軸飛行器的四個(gè)螺旋槳都是電機(jī)直連的簡單機(jī)構(gòu),十字形的布局允許飛行器通過改變電機(jī)轉(zhuǎn)速
2017-11-19 15:14:4748535 四軸飛行器是一種四旋翼的飛行器,其四個(gè)螺旋槳都是通過無刷電機(jī)驅(qū)動(dòng)產(chǎn)生上升力,X形的布局允許飛行器通過飛控系統(tǒng)改變無刷電機(jī)轉(zhuǎn)速,起到了穩(wěn)定飛行姿態(tài)的作用。近年來,無論是軍事科技上還是民用航拍市場,甚至
2018-02-01 15:06:233 通俗點(diǎn)說就是擁有四個(gè)獨(dú)立動(dòng)力旋翼的飛行器,四軸飛行器是多軸飛行器其中的一種,常見的多軸飛行器有兩軸,三軸,四軸,六軸,八軸。
2018-03-28 09:39:0497771 本文檔的主要內(nèi)容詳細(xì)介紹的是多旋翼無人機(jī)飛行器的入門學(xué)習(xí)資料和實(shí)踐說明包括了:(1)無人飛行器概述 (2)多旋翼無人飛行器飛行控制系統(tǒng) (3)多旋翼無人飛行器模擬訓(xùn)練 (4)多旋翼無人飛行器的安裝調(diào)試
2019-11-04 08:00:0012 無人機(jī)是一種有動(dòng)力、可控制、能攜帶多種任務(wù)設(shè)備并能重復(fù)使用的無人駕駛飛行器。如今民用消費(fèi)級(jí)無人機(jī)越來越受到人們的喜愛,市面上無人機(jī)品牌這么多看得頭都痛了,不如自己做個(gè)飛行器。下面小編為您介紹六軸飛行器制作教程。
2020-05-13 11:02:582799 基于STM32單片機(jī)的四旋翼飛行器控制系統(tǒng)
2021-06-11 09:54:54119 飛行器燃料溫度控制系統(tǒng)設(shè)計(jì)方案
2021-06-22 15:21:2319 多旋翼飛行器設(shè)計(jì)與控制的底層飛行控制
2021-09-14 09:36:140 全球領(lǐng)先的無人飛行器控制系統(tǒng)及無人機(jī)解決方案的研發(fā)和生產(chǎn)商選用GLPOLY無應(yīng)力導(dǎo)熱凝膠XK-G30;低密度雙劑液態(tài)導(dǎo)熱凝膠XK-S10LD,導(dǎo)熱吸波凝膠XK-G20E;為什么全球最大的無人飛行器客戶會(huì)如此青睞GLPOLY的導(dǎo)熱材料呢?
2022-04-18 09:06:16670 在本教程中,我們將設(shè)計(jì)一個(gè) X 形的四軸飛行器。兩種形狀都是穩(wěn)定的,但在向前飛行中,四軸飛行器在向前飛行中需要偏航控制輸入。兩種配置的偏航控制權(quán)限相同,但在交叉配置的情況下,俯仰和橫滾控制權(quán)限最多可增加約 30%。四軸飛行器依靠加速度計(jì)和陀螺儀等電子傳感器和控制系統(tǒng)來穩(wěn)定飛行。
2022-07-29 16:13:582353 
隨著科技的發(fā)展以及軍事戰(zhàn)略思想的轉(zhuǎn)變,無人飛行器在軍事、民用領(lǐng)域具有廣泛的應(yīng)用前景和極其重要的現(xiàn)實(shí)意義。各國正在研制和開發(fā)各種性能獨(dú)特的無人飛行器, 改造的核心就是飛行控制系統(tǒng)。
2023-06-19 16:35:09682 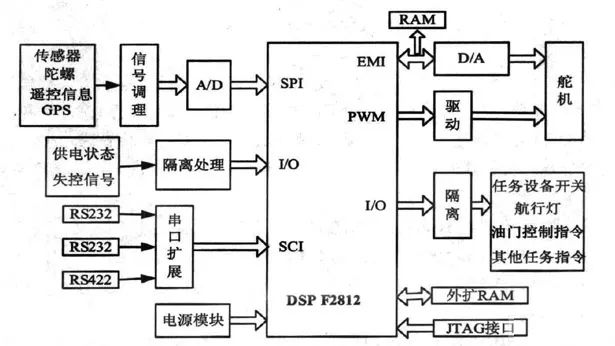
電子發(fā)燒友網(wǎng)站提供《單片機(jī)在超小型無人飛行器控制系統(tǒng)中的應(yīng)用.pdf》資料免費(fèi)下載
2023-10-12 10:41:290
 電子發(fā)燒友App
電子發(fā)燒友App


 ? ?
? ? ?
?
 ? ?
? ?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論