 電子發燒友App
電子發燒友App


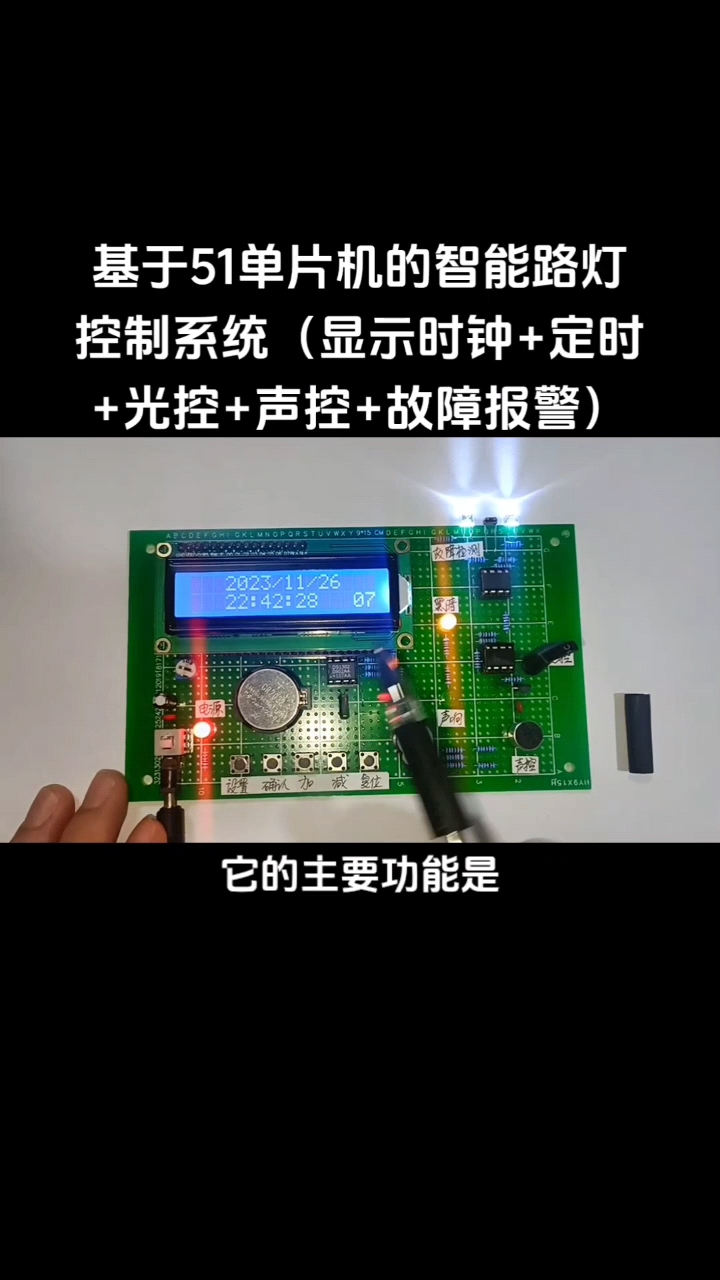
主要內容和基本要求
采用51單片機作為系統的控制芯片,設計一個窗簾升降器,并采用步進電機控制窗簾的升降,控制平穩,精度高。
基本要求:
1.系統設置窗簾升、降變速功能,可設置三種不同的速度,分別為快速、中速、慢速。
2.能夠通過鍵盤設定窗簾上升或者下降的任意定點位置,通過光感應,還能夠自動控制選擇窗簾的升降,設置有全開、半開、全關三個位置。
3.能夠對設置的狀態發出語音提示,并用數碼管顯示電機轉速與窗簾位置值,用點陣顯示器顯示上升“↑”、下降“↓”停止“Ⅱ”三個狀態。
4.系統具有手動、紅外線遙控、光感自控等功能。
部分程序:
#include //庫函數
#include //庫函數//如果 實物 打開
#include //AD轉換庫函數
#define uchar unsigned char//宏定意
#define uint unsigned int//宏定意
#define ulong unsigned long //宏定意
sbit rs=P2^0;//LCD 1602 引腳定意
sbit rd=P2^1;//LCD 1602 引腳定意
sbit lcden=P2^2;//LCD 1602 引腳定意
sbit menu=P2^5; //主功能鍵
sbit add=P2^4;//加鍵
sbit dec=P2^3;// 減鍵
sbit open=P2^6;// 手動 開
sbit close=P2^7;// 手動 關
sbit IR=P3^5; //紅外感 應
sbit BEEP=P3^1;// 報警
#define MOTORSTEP P1 //宏定義,定義P1口為步進電機驅動端口
uchar dsflj,kval,lofl,menusw,con,befl,zhenfl,fanfl,brigfl;// 各種變量標記 正返轉標記
uint sudu,dwbrigfl,humfl; //電機速度 //光度下限/濕度標記
uchar count0,second,zhenzhuan,fanzhuan,timeflg,opensw,closesw,keysw;//時鐘變量 正反轉 變量
uint adc0,adc1;
uint upbrig,dwbrig,kwbrig,uphum,uptemp,upsmo; // 下限 亮度 上限濕度// 上限溫度
uint hour,minit,secon,DSdat,VAldat ,time;//時鐘變量
uint ONhour,ONminit,ONsecon; // 開窗時間變量
uint OFhour,OFminit,OFsecon; // 關窗時間變量
uchar U8T_data_H,U8RH_data_H;
#define Imax 14000
//此處為晶振為11.0592時的取值
,
#define Imin 8000 //如用其它頻率的晶振時,沒
#define Inum1 1450 //要改變相應的取值。
#define Inum2 700
#define Inum3 3000
uchar f=0;
uchar Im[4]={0x00,0x00,0x00,0x00}; // 遙控碼存儲空間
uchar show[2]={0,0}; // 變量申明
ulong m,Tc; // 變量申明
uchar IrOK; // 變量申明
void delay(uint z);// 開窗時間變量
void write_rvalue(); // 顯示函數
// 以下是各種字幕提示語數組 **********
uchar code logo1[]= "Welcome to use ";
uchar code logo2[]="window system ";
uchar code logo3[]="S=253T=85oCU=85%";
uchar code logo4[]="Br= 12:00:00 ";
uchar code logo5[]="window open ";
uchar code logo6[]="window close ";
uchar code logo7[]="GWbrig= LUX ";
uchar code logo8[]="UP-Hum= % ";
uchar code logo9[]="Please input... ";
uchar code logo10[]="Please wait... ";
uchar code logo11[]="UP-TEM= oC ";
uchar code logo12[]="SEtime 12:00:00";
uchar code logo13[]="ONtime 12:00:00";
uchar code logo14[]="OFtime 12:00:00";
uchar code logo15[]="UP-SMO= ";
uchar code logo16[]="KWbrig= LUX ";
void delaymoto() //步進電機每一步間延遲函數
{
uint y=sudu;
while(y--);
}
uchar code FFW[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //步進電機驅動值數組
uchar code REV[]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01}; //步進電機驅動值數組
xdata num1 [4] = {0x00,0x00,0x00,0x00,};
xdata num2 [4] = {0x00,0x00,0x00,0x00,};
xdata num3 [4] = {0x00,0x00,0x00,0x00,};
xdata num4 [4] = {0x00,0x00,0x00,0x00,}; // AD轉換變量組組
xdata num5 [4] = {0x00,0x00,0x00,0x00,}; // AD轉換變量組組
void delaylog(uint z)//延時函數
{
uint x,y;
for(x=z;x>0;x--)
for(y=500;y>0;y--);
}
void delay(uint z)//延時函數
{
uint x,y;
for(x=z;x>0;x--)
for(y=10;y>0;y--);
}
void SETP_MOTOR_FFW() //反轉
{
uint i=0;
for(i=0;i<8;i++) //8步一個循環
{
MOTORSTEP=FFW[i]; //取值賦給P1驅動口
delaymoto();
}
}
void SETP_MOTOR_REV() //正轉
{
uint i=0;
for(i=0;i<8;i++) //8步一個循環
{
MOTORSTEP=REV[i]; //取值賦給P1驅動口
delaymoto();
}
}













 工商網監
工商網監
評論