 電子發燒友App
電子發燒友App


傳統的無人值守地面探測系統可以探測一定范圍內的地面運動目標。其工作模式是把采集到的信號發送回地面接收站再進行處理。此方法不能實現終端實時信號處理,且反應時間較長。另外,信號在傳輸和接收的過程中會受到不同程度的干擾,這樣就會使識別效果出現偏差,特別是在復雜電磁環境條件下,無線通信時間越長,傳輸數據量越大,則受到的干擾越多,且探測系統越容易被敵方發現。本文所設計的探測系統提出了一種實時處理信號的方法,直接將處理的結果發送給決策者,這樣既避免了震動和聲音信號在傳輸過程中的失真,又縮短了反應時間,同時還增加了探測系統的隱蔽性。
系統總體方案設計
無人值守探測系統一般由地震動和聲音傳感器、中央處理芯片、運算放大電路以及無線收發裝置等模塊組成,通過傳感器系統采集震動和聲音信號經過濾波電路、運算放大電路以及AD轉換電路將模擬信號轉換為數字信號,再對這些信號進行時頻分析,以期達到識別目標性質的目的。根據系統探測和監視的需求,地震動傳感器應能探測到200m以內的運動車輛及20m以內人員腳步的信號,聲音傳感器應能感應到600m以內的車輛噪聲。
由于DSP處理器具有效率高,適合數據量較大、算法較復雜的信號處理等特點,因此本文選取DSP作為無人值守地面探測系統運算處理芯片。
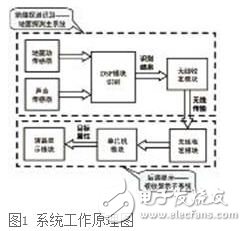
本文所設計的地面探測系統主要由前端探測識別——地面探測主系統和后端顯示——接收顯示子系統兩部分組成。當探測區域出現激勵時,系統開始工作,DSP的集成A/D采樣接口開始采集地震動和聲音傳感器經過放大調理的信號。DSP模塊識別目標性質以后,通過串口發送相應的編碼到無線收發模塊,然后經過無線傳輸,發送到接收顯示子系統的無線收發模塊,最后通過單片機串口將編碼發送給單片機,將編碼代表的目標屬性在液晶模塊上顯示出來。系統工作原理如圖1所示。
設計所需器件選型
傳感器的選型
(1)地震動傳感器
系統所使用的地震動傳感器安裝在探測系統中并布設到地面上,用于檢測目標運動引起的地震動信號。
動圈磁電式傳感器是地震勘探中廣泛使用的一種成熟的傳感器,其性能可靠、價格低廉,而且輸出信號對后續電路要求不高,可以簡化系統電路設計。本文選用DX20動圈磁電式傳感器。
(2)聲音傳感器
聲音傳感器主要用于檢測目標發動機引起的噪聲和聲壓變化,是由探測到的聲音信號的頻率和聲強級來識別目標的出現。常用的聲音傳感器可分為電容式、碳粉式、壓電式和光纖聲音傳感器。其中電容式聲音傳感器具有較高的靈敏度、較低的自生噪聲及較低的失真,性能優良,其性能可以滿足本系統的要求。本系統選用電容式聲音傳感器。
電子元件的選型
為了使該系統在野外長期穩定地工作,系統需采用低功耗設計。在該系統中,DSP、運算放大器和無線收發模塊的功耗占系統功耗的很大部分。所以對此三種器件的選擇需特別注意功耗的問題。
(1)DSP的選型
隨著半導體科技的發展,DSP的種類越來越多。選擇DSP處理器主要從以下幾個方面考慮:
② 性能:描述DSP性能的最重要的指標是運算速度。
②片內硬件資源:片內硬件資源主要包括片內RAM、ROM的數量,I/O接口的種類和個數,總線驅動能力,外部可擴展的程序和數據空間等。
③系統運算量。
④通常,DSP的功耗是較大的,系統采用的DSP芯片需具有空閑模式,能夠做到有目標的時候探測,沒有目標的時候休眠的要求,以降低功耗。
TI公司是DSP主要生產廠家,它的產品主要包括TMS320C6000、TMS320C5000、TMS320C2000系列。其中,C5000DSP可達200MHz左右的工作時鐘頻率,被廣泛應用于語音信號處理和調制解調器等領域,其價格適中,且硬件設計要求比較高。
本系統所必需的DSP片內外設主要包括集成ADC轉換器、DPLL時鐘產生器、DMA控制器、EMIF、MCBSPS、通用定時器、看門狗定時器等,同時本系統具有一定的運算量。因此,本系統選用C5000DSP作為主要運算處理芯片。C5000 DSP包括C55x和C54x兩代產品。充分考慮到系統的實時性和低功耗要求,本系統選取TI公司生產的TMS320VC5509A作為核心計算單元,它的處理能力可達到400MIPS,其資源可以完成地震動和聲音信號采樣以及目標識別功能。該型DSP具有休眠功能,當探測區域內沒有目標時,主系統DSP進入旁路模式,處于空閑模式,其工作電流僅為16μA,大大降低了DSP的功耗;當目標出現時,DSP開始工作。
TMS320VC5509A集成一個雙通道10位的模數轉換(ADC)模塊。模數轉換器不能工作在連續模式下,DSP必須向ADC控制寄存器(ADCctl)的ADCstart位寫入1來初始化每次轉換。一旦轉換開始,DSP必須等到轉換完成才能選擇另外一個通道或者初始化另外一次新的轉換。ADC不會向DSP發出中斷信號,所以DSP只有通過查詢ADC數據寄存器(ADCdata)的ADCBusy位來獲取ADC的狀態。當轉換完成時,ADCBusy由1被置為0,表示轉換數據已經存放在數據寄存器ADCData中,然后DSP能夠從ADCData讀取數據。ADCData中也包含寄存器ADCctl中表示多路選擇器通道選擇值的ChSelect的值,所以DSP能夠鑒別是從哪個通道獲取的采樣值。
(2)外設控制和擴展芯片的選型
本系統的可編程邏輯器件需滿足上電即可工作,其作用是作為DSP外設控制和擴展的芯片,設計的組合邏輯比較多,因此首選CPLD。隨著大規模可編程器件的發展,采用DSP+CPLD結構的信號處理系統顯示出了優越性,該結構具有結構靈活,通用性較強,適于模塊化設計,易于維護和擴展。
可編程邏輯器件(CPLD)采用ALTERA公司的EPM570T100C5N來實現系統的接口邏輯。該邏輯器件采用FPGA結構,配置芯片集成在內部,和普通PLD一樣滿足上電即可工作。
(3)集成運放的選型
地震動傳感器需探測200m以內的運動車輛及20m以內人員腳步的信號,聲音傳感器需感應600m以內的車輛噪聲(探測距離與傳感器的靈敏度關系非常密切)。在如此遠距離情況下,由傳感器檢測得到的目標信號很微弱,通常只有毫伏級。如此小的信號必須先經過前置放大和預處理后才能進行采集處理。另外,信號放大處理電路功耗應盡量小。
由于原始信號極其微弱,很容易被噪聲所淹沒,為了能有效抑制干擾,設計選用美國TI公司生產的OPA4336運算放大器,它的內部集成了四個運算放大器,具有精度高、功耗低等特點。
(4)其他器件的選型
SDRAM選用HY57V641620ETP,FLASH選用S29AL800D;選用78M05(12V-5V電壓轉換芯片)作為輔助芯片。
DSP系統設計
DSP工作模塊設計
在此主要介紹硬件電路設計,通常是指以DSP為中心的外圍電路設計,包括前向通道(輸入數據通道)和后向通道(輸出數據通道),以及復位電路、電源設計等。DSP工作模塊原理如圖2所示。
DSP系統采用四節3V高效能電池串聯供電(供電電壓DC12V),采用78M05轉換出來的DC5V,再由TLV1117-3.3和TLV1117-ADJ穩壓芯片提供的3.3V與1.6V兩種電壓作為DSP的工作電壓,并用JTAG口硬件仿真并下載程序,SDRAM用于動態存儲采集到的數據,FLASH保存DSP運行程序,待復位后重新載入DSP內部RAM中運行,CPLD負責外圍器件的選擇控制。DSP通過16根數據線和14根地址線與SDRAM、FLASH、CPLD進行通信。DSP作為系統的核心,完成信號采集、過零數分析、短時能量分析、功率譜相似性識別算法等處理過程。
系統電源模塊設計
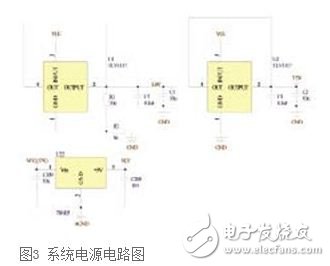
主系統額定輸入電壓DC12V,78M05(圖3中U22)轉換出DC5V(供無線通信模塊使用)再由TLV1117-3.3(圖3中U2)和TLV1117-ADJ(圖3中U1)轉換DC3.3V和DC1.6V供DSP系統使用,系統電源電路如圖3所示。
由于本系統需要將采集到的信號做信號分析和變換等工作,對DSP的時鐘信號有較高的要求,因此采用12M有源晶振作為DSP系統工作時鐘源。DSP等各個芯片的濾波電容均放置于芯片的底層,一方面可以節省頂層布線空間,另一方面可以較好地濾除電源產生的毛刺等干擾信號。另外將10uF和0.1uF的電容交叉放置可以產生更好的濾波效果,系統晶振與DSP的濾波電容電路如圖4所示。

DSP與SDRAM和FLASH的接口電路設計
本系統硬件設計中涉及較多的DSP與存儲器的連接與訪問。TMS320VC5509A的外部存儲器接口除了對異步存儲器的支持以外,還提供對同步突發靜態存儲器(SBSRAM)和同步動態存儲器(SDRAM)的支持。異步存儲器可以是靜態隨機存儲器(SRAM)、閃存等存儲設備,也可以是A/D轉換器件、并行顯示設備等。DSP與SDRAM和FLASH的接口電路如圖5所示。
![]()
存儲模塊的設計
DSP既可將SRAM作為程序存儲器,也可作為數據存儲器。本系統用FLASH存放程序,在系統運行時,為提高運行速度,需將程序從FLASH搬至快速SRAM中運行,此時SRAM地址映射在程序空間中,而當系統的數據存儲空間超過內部RAM時,SRAM地址映射在數據空間中。系統采用HY57V641620型動態數據存儲器SDRAM作為SRAM。
為了充分發揮DSP性能,在加電后需要將用戶代碼裝載到高速RAM存儲器中運行。FLASH存儲器是一種高密度、非易失性的電可擦寫存儲器,存儲量大,使用方便,適用于低功耗、高性能的系統。設計FLASH與DSP的接口時,FLASH的數據線和地址線分別和DSP的外部數據和地址總線相連,FLASH的分頁控制位A[13:18]位連接CPLD,對CPLD編程實現寄存器控制高位譯碼,使得DSP可以訪問FLASH的高位存儲地址段。
傳感器調理及放大電路設計
(1)地震動信號采集電路
考慮到地震動信號的頻率均為150Hz以下,在儀器用測量放大器的基礎上添加了低通濾波電路,以進一步抑制環境高頻噪聲對信號產生的不良影響,該低通濾波器將采集到的地震動信號頻率限制在340Hz以下。
OPA4336是CMOS型、軌對軌輸入輸出的運算放大器,提供了4個獨立的放大器,具有高輸入阻抗、低輸入失調電壓、低輸入偏置電流、低噪聲等特點,其電源工作范圍為2.3V~5.5V。系統放大電路由兩級組成:兩個對稱的同相放大器U6A和U6C構成第一級,U6B為第二級放大器,U6D是聲音放大器,震動信號調理及放大電路如圖6所示。
![]()
該兩級放大電路,既滿足電路穩定性要求,又可提供一定倍數的增益。對經過放大的信號進行A/D轉換后即可送入DSP進行信號的采集與識別。
(2)聲信號采集電路
聲音放大電路附加了一個一階低通硬件濾波器(C41=470pF)以消除較高頻環境噪聲。此外,由于采用單電源模式,供電電壓為3.3V,因此需提供一偏置電壓將參考電平拉高1.6V,以保證信號的完整性。為了電源去耦,應在電源引腳和印制線路板上與運放參考端之間連接一個旁路電容。同時該電容在元器件布局時應盡量靠近運放電源引腳。VOICE接聲音傳感器,AIN1接DSP的A/D轉換接口ADC1。聲音信號調理及放大電路如圖7所示。
![]()
便攜式接收顯示子系統的設計
單片機接收系統電路設計
采用ATMEL公司推出的AT89S52作為單片機接收系統主控芯片。AT89S52除了具有8051的全部功能外,還內置了一些比較實用的功能部件。如AT89S52內部的程序存儲器是8KB可擦寫的FLASH存儲器,支持在線系統編程ISP,調試非常方便。單片機接收系統電路如圖8所示。
![]()
液晶顯示電路設計
顯示模塊有兩種選擇方案:①用數碼管作為顯示器;②LCD液晶顯示。雖然數碼管使用簡單,但不能顯示漢字、字符等,為了使指揮員能夠更加直觀并且更加迅速地了解目標的屬性,便攜式接收顯示子系統采用JM12864帶中文字庫的液晶顯示器作為顯示模塊。
JM12864可顯示漢字及圖形,內置8192個中文漢字(16×16點陣)、128個字符(8×16點陣)及64×256點陣顯示RAM(SDRAM)。液晶顯示模塊電路如圖9所示。
![]()
無線收發模塊設計
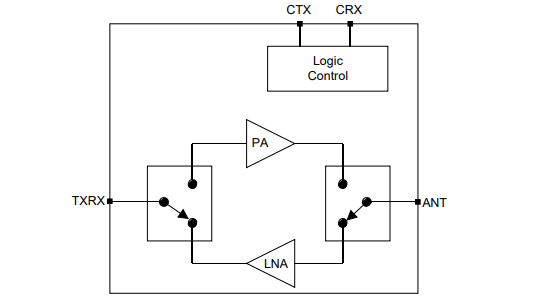
無線收發模塊選用深圳科易連公司生產的KYL-1020L,它的優點是通信距離遠,并且具有休眠控制功能,DSP可以通過軟件控制它處于工作或休眠狀態,極大地降低了系統功耗。
KYL-1020L具有如下特點:①載波頻率為433MHz;②多種可選的通訊接口,如RS-232和TTL;③8個通訊信道;④傳輸數率為9600bps;⑤數據格式為8N1/8E1/801;⑥提供方波傳輸功能,方便非標的編碼客戶使用;⑦收發一體,半雙工工作模式;⑧低功耗,并具有休眠功能;⑨工作溫度為-35℃~+75℃(工業級)。
KYL-1020L的休眠功能對本系統極為重要。由于休眠電流只有不到20μA,功率不到0.18mW,極大地降低了系統功耗,使得系統能夠長時間工作。無線收發模塊電路如圖10所示。
![]()
結束語
本文完成了基于DSP無人值守地面探測系統的硬件設計。首先介紹了系統總體方案設計以及傳感器和電子元件的選型,然后闡述了DSP工作模塊、電源模塊、外部寄存器接口電路、存儲模塊和傳感器調理及放大電路的設計,最后介紹了便攜式接收顯示子系統的設計。該地面探測系統性能穩定,原理可行,能實時地為偵察或警戒分隊提供戰場信息。




















 工商網監
工商網監
評論