本文采用一種基于比例積分(PI)控制算法的環路濾波器應用于帶寬自適應的全數字鎖相環,建立了該鎖相環的數學模型
2010-10-14 10:03:25 1271
1271 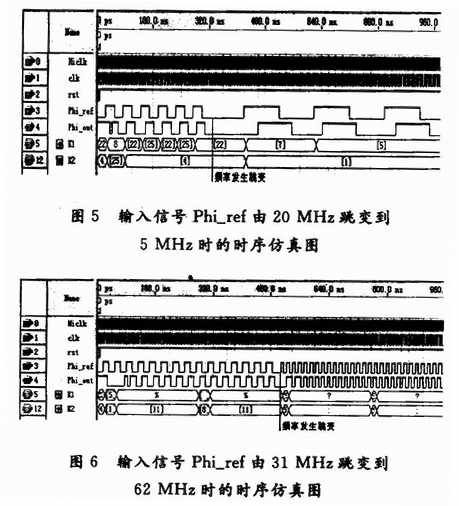
本帖最后由 gk320830 于 2015-3-9 20:38 編輯
最近在用adf 4001做一個鎖相環,環路配置好后發現鎖定不了,電荷泵cp 輸出一直在掃描,檢查芯片內部的配置,也沒發現什么問題,分頻輸出也是正常的,哪位高手用過這個芯片,幫我分析分析吧,期待中。。。
2010-09-14 08:52:16
摘要:本文針對光伏并網發電系統中數字鎖相環易受過零檢測電路影響,穩定度差的問題,采用了相應的硬件和軟件方 法解決鎖相環穩定性問題。硬件上通過提前過零檢測來補償加重濾波器帶來的相位滯后;軟件上加入判斷
2018-12-03 14:01:24
相同的方法用lead產生一個dec信號,用lag信號產生一個inc信號。至此,整個數字鎖相環已經設計完畢。步驟中提到的計數器就相當于積分,phase的作用就是完成鑒相,第10步也就是一些有關數字鎖相環的書籍
2012-01-12 15:29:12
數字鎖相環設計源程序PLL是數字鎖相環設計源程序, 其中, Fi是輸入頻率(接收數據), Fo(Q5)是本地輸出頻率.目的是從輸入數據中提取時鐘信號(Q5), 其頻率與數據速率一致, 時鐘上升沿鎖定在數據的上升和下降沿上;頂層文件是PLL.GDF
2009-12-18 10:37:37
與解調、反卷積、SVD、獨立分量分析及同太民濾波等)、平穩隨機信號的基本概念、經典功率譜估計、參數模型功率譜估計、數字信號處理中的有限字長問題及數字信號處理的硬件實現等內容。書中介紹了數字信號處理中所
2023-09-19 08:01:36
,在處理起來更是高效,所以,非常的使用在便捷設備當中的使用,像是手機等。DSP經常使用能夠同時獲取多個數據或指令的特殊內存架構。 數字信號處理器的特點 (1) 軟件可實現 純粹的模擬信號處理必須
2020-12-09 14:01:39
要實現鎖相環的基本原理及工作狀態,如何編寫程序呢?
2014-06-11 21:33:38
請問鎖相環仿真用什么軟件好,我們需要用到ADF4110VOC選擇MAX2606
2016-06-27 15:57:53
的條理性以及邏輯性,其實現在想想原來就是軟件鎖相環原理跟控制器設計方法混為一談,經過上面這么一分析,明白原來我們的控制器是采用簡便方法,這樣一來就清楚多了。
2015-01-04 22:57:15
鎖相環控制頻率的原理鎖相環頻率自動跟蹤-------用鎖相環可以確保工作在想要的頻率點上如何理解以下兩段話?鑒相器是相位比較裝置, 它把輸入信號和壓控振蕩器的輸出信號的相位進行比較, 產生對應
2022-06-22 19:16:46
對于鎖相環部分一直有個疑問:1)鑒相器是根據輸入信號和輸出信號的相位差來輸出一個電壓,通過LP后,控制壓控振蕩器的頻率輸出2)假如輸入鑒相器的頻率不同,那么電路是如何根據相位差來判斷頻率之間的差值呢?也就是相位差與頻率差之間的關系是怎樣的? 有木有相關的資料可以參考?或是請大牛們解釋下,多謝啦
2017-07-27 09:03:46
本帖最后由 gk320830 于 2015-3-7 20:18 編輯
鎖相環的原理,特性與分析所謂鎖相環路,實際是指自動相位控制電路(APC),它是利用兩個電信號的相位誤差,通過環路自身調整作用,實現頻率準確跟蹤的系統,稱該系統為鎖相環路,簡稱環路,通常用PLL 表示。
2008-08-15 13:18:46
電荷泵鎖相環的基本原理是什么?電荷泵鎖相環的噪聲模型與相位噪聲特性是什么?電荷泵鎖相環的相位噪聲與環路帶寬關系是什么?
2021-06-07 06:57:53
本帖最后由 zhihuizhou 于 2011-12-21 17:43 編輯
鎖相環PLL原理與應用 第一部分:鎖相環基本原理 一、鎖相環基本組成 二、鑒相器(PD) 三
2011-12-21 17:35:00
如題,AD9957的鎖相環一直失鎖,不用鎖相環輸出點頻信號時正常的,用了鎖相環后,PLL_LOCK信號一直為低,sync_clk輸出信號也不是穩定的周期信號,環路濾波器的值有點誤差,因為現有的器件沒有那么精確的電容電阻值,問下鎖相環的控制除了控制CFR3之外還有別的要注意的么?
2018-12-10 09:30:24
使用ADF4002搭建一個鎖相環,依據simPLL軟件推薦的濾波器,實驗效果未達預期。實驗記錄見附件,請高手給看看問題出在哪里?
2021-11-24 22:56:12
新版AD公司鎖相環仿真軟件
2013-07-20 21:44:03
求助,CD4046鎖相環的參數要怎么設計呀?我設計的時候是根據datasheet設計的,可是用protues仿真的時候,在中心頻率也入不了鎖,引腳1輸出總是一高一低,然后把輸入信號的電壓調大后,不管
2020-10-11 13:02:47
該文章是完全原創,用最簡潔的語言講清楚FPGA實現負反饋的精要。震撼!FPGA實現負反饋控制純數字鎖相環!.zip (225.26 KB )
2019-04-30 04:50:41
LabVIEW鎖相環(PLL) 鎖相環是一種反饋電路,其作用是使得電路上的時鐘和某一外部時鐘的相位同步。PLL通過比較外部信號的相位和由壓控晶振(VCXO)的相位來實現同步的,在比較的過程中,鎖相環
2022-05-31 19:58:27
原理實現的頻率及相位的同步技術,其作用是將電路輸出的時鐘與其外部的參考時鐘保持同步。當參考時鐘的頻率或相位發生改變時,鎖相環會檢測到這種變化,并且通過其內部的反饋系統來調節輸出頻率,直到兩者
2021-11-04 08:57:18
PLL(鎖相環)電路原理是什么?
2022-01-21 07:03:37
概述:SC9257是杭州士蘭微電子生產的一款數字調諧系統鎖相環(PLL FOR DTS)。該SC9257是鎖相環(PLL)的LSI數字調諧系統(DTS)與內置的2模數預分頻器。所有功能都通過3根串行
2021-05-18 07:27:48
信號源的任何應用的理想選擇,并且利用微帶或陶瓷諧振器拓撲結構可提供出色的相位噪聲性能。測試儀器雷達系統SFS10500H-LF鎖相環SFS10625H-LF鎖相環SFS10640H-LF鎖相環
2021-04-03 17:05:46
DSP數字信號處理器
2023-04-06 11:21:43
數字信號處理器
2023-03-24 15:01:31
a[10]=[0],用觀察窗口觀察變量時,只有a[0]=0,其他值仍然是隨機值。難道數組的初始化必須對每個元素分別賦值嗎?
2. 單相數字鎖相環的設計。目前我們在進行單相光伏并網逆變器的開發,在對電網相位的跟蹤上處理不是特別好,請問貴司有沒有數字鎖相環的程序包或者相關的說明文檔可以參考?
2018-05-14 03:22:42
采用后向Euler數值積分法實現二階鎖相環的一個仿真模型,對二階鎖相環進行仿真,那位大俠做過?可以參考下原代碼不?
2012-05-28 17:21:05
Phase-Locked Loop)逐步發展起來。所謂全數字鎖相環,就是環路部件全部數字化,采用數字鑒相器、數字環路濾波器、數控振蕩器構成鎖相環路,并且系統中的信號全是數字信號。與傳統的模擬電路實現的鎖相環
2010-03-16 10:56:10
有沒有大神有用Verilog代碼寫的數字鎖相環程序呀,求 。謝謝
2017-07-05 22:54:56
鎖相環路是一種反饋控制電路,簡稱鎖相環(PLL)。許多電子設備要正常工作,通常需要外部的輸入信號與內部的振蕩信號同步,利用鎖相環路就可以實現這個目的。鎖相環通常由鑒相器(PD)、環路濾波器(LF
2019-03-17 06:00:00
小弟需要對正弦信號進行鎖相,就是鎖相環的輸入輸出都是正弦信號,有合適的芯片嗎?最好給點資料,小弟急需!!還有芯片要可以外接倍頻單元。在此謝過了!!!
2011-03-13 09:46:00
DSP技術廣泛應用于各個領域,但傳統的數字信號處理器由于以順序方式工作使得數據處理速度較低,且在功能重構及應用目標的修改方面缺乏靈活性。而使用具有并行處理特性的FPGA實現數字信號處理系統,具有很強的實時性和靈活性,因此利用FPGA實現數字信號處理成為數字信號處理領域的一種新的趨勢。
2019-10-17 08:12:27
,就像空氣之于人類。 本次記錄一下基于二階廣義積分器虛擬兩相的單相軟件鎖相環的simulink仿真。仿真搭建如圖1 所示。...
2021-07-09 07:20:10
哪位大神關于《數字信號處理與數字信號處理器》的DSP論文,求分享。。。。
2014-05-27 16:25:52
一、內容繼續無霍爾的學習,根據原理及仿真,了解相關原理和實現方法。二、知識點1.基于鎖相環的轉子位置估計反正切函數的轉子位置估算由于是根據估算的擴展反電動勢進行計算的,但是由于滑模控制在滑動模態下
2021-08-27 06:54:13
、鎖相環頻率合成器的基本工作原理鎖相環(PLL)是一個相位誤差控制系統,通過將輸入信號與壓控振蕩器(VCO)輸出信號之間的相位進行比較,產生相位誤差電壓經處理后去調整壓控振蕩器的相位。當環路鎖定時,輸入信號
2018-09-06 14:32:13
摘要:數字三相鎖相環中含有大量乘法運算和三角函數運算,占用大量的硬件邏輯資源。為此,提出一種數字三相鎖相環的優化實現方案,利用乘法模塊復用和CORDIC算法實現三角函數運算,并用Vetilog
2019-06-27 07:02:23
隨著集成電路技術的不斷進步,數字化應用逐漸普及,在數字通信、電力系統自動化等方面越來越多地運用了數字鎖相環。它的好處在于免去了模擬器件的繁瑣,而且成本低、易實現、省資源。本文綜合以上考慮,在一片FPGA中以Quartus II為平臺用VHDL實現了一個全數字鎖相環功能模塊,構成了片內鎖相環。
2019-10-10 06:12:52
鎖相環是什么工作原理?如何采用FPGA與頻率綜合器ADF4111相結合的方法實現數字鎖相式頻率源的設計?
2021-04-14 07:00:20
鎖相環頻率合成器是什么原理?基于CD4046的鎖相環頻率合成器的設計
2021-04-12 06:28:35
全數字鎖相環由那幾部分組成?數字鎖相環的原理是什么?如何采用VHDL實現全數字鎖相環電路的設計?
2021-05-07 06:14:44
如何去選擇數字信號處理器 (DSP)?
2021-05-25 07:20:05
控制用微處理器的主要性能有哪些?處理器在調頻(FM)調諧器中的應用是什么?數字調諧系統有哪些性質?怎樣去設計一種基于PLL(鎖相環)合成器的數字調諧系統?
2021-08-17 07:03:36
摘要:本文針對光伏并網發電系統中數字鎖相環易受過零檢測電路影響,穩定度差的問題,采用了相應的硬件和軟件方法解決鎖相環穩定性問題。硬件上通過提前過零檢測來補償加重濾波器帶來的相位滯后;軟件上加入判斷
2018-12-05 09:53:26
fpga中的用鎖相環產生時鐘信號相比于用計數器進行分頻有哪些優點,看fpga中鎖相環的結構,其前期的輸入信號和后期的輸出信號不也是通過計數器進行分頻實現的嗎
2014-10-06 10:46:05
模擬鎖相環與數字鎖相環的主要區別在哪里?
2023-04-24 10:48:52
經典數字鎖相環路結構及工作原理是什么?改進的數字鎖相環結構及工作原理是什么怎樣對改進的數字鎖相環進行仿真?
2021-04-20 06:47:12
數字鎖相環頻率合成系統的工作原理CPU控制數字鎖相環頻率合成系統FPGA實現
2021-04-09 06:20:37
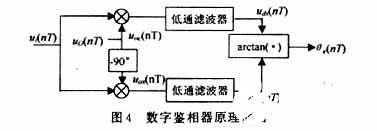
大家好,我的課題是要用FPGA做一個高精度鎖相環。這個數字鎖相環的工作原理為:正弦模擬信號通過低通濾波器后,經過模數轉換器(ADC)轉化為數字信號,與NCO(數控振蕩器) 的輸出信號相乘后濾波,從而
2016-08-15 11:31:56
小的做畢業設計遇到的瓶頸,我要設計一個實現位同步的電路,基帶信號是1khz,載波是10khz,圖中紅線是基帶信號,黃色的是我經過低通,微分,整流后出來的信號,現在我需要用一個鎖相環實現窄帶濾波器的功能,把黃色信號變成頻率和基帶信號1khz一樣的位定時信號,該如何實現,求大神附圖,感激不盡!!!
2013-05-16 17:26:46
最近在搞鎖相環,總是有問題,功能無法實現,特求一個可以鎖住輸入信號頻率為0.01~1Hz的數字鎖相環程序參考參考,最好有注。參數達不到也沒關系,我可以自己修改。謝謝大神們啦!
2016-08-28 17:33:56
本文介紹了電荷泵鎖相環電路鎖定檢測的基本原理,通過分析影響鎖相環數字鎖定電路的關鍵因子,推導出相位誤差的計算公式。并以CDCE72010 為例子,通過實驗驗證了不合理的電路設計或外圍電路參數是如何影響電荷泵鎖相環芯片數字鎖定指示的準確性。
2021-04-20 06:00:37
簡易數字信號傳輸性能分析儀鎖相環資料
2015-07-20 23:40:43
請教一下大神鎖相環是如何實現倍頻的?
2023-04-24 10:15:39
數字鎖相環可以用于鎖定正弦信號嗎?
2019-02-18 07:38:23
數字鎖相環的參考信號可以是正弦信號嗎
2018-08-18 06:55:49
工程師您好:ADF4351內部集成VCO振蕩器,如果結合外部環路濾波器和外部參考時鐘頻率能構成數字鎖相環嗎?如果不能是不是因為ADF4351內部沒有鑒相器,如果我想做數字鎖相環還要和ADF4002合用嗎?能實現位同步嗎?期待您們的答復!
2018-09-14 14:23:29
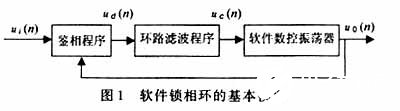
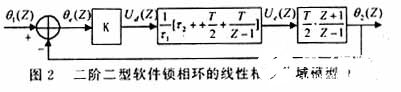
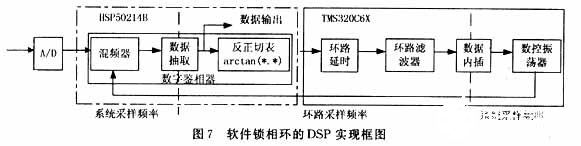
軟件鎖相環的基本模型軟件鎖相環的數學模型多速率條件下的軟件鎖相環軟件鎖相環的DSP實現
2021-04-21 07:22:49
怎樣去設計一種自適應軟件鎖相環?如何對自適應軟件鎖相環進行測試?
2021-06-08 07:07:17
我剛接觸鎖相環沒多長時間,最近想使用ADF4106搭建一個雙環鎖相環,我閱讀的資料都沒有說主環路環路濾波器參數計算問題,我想咨詢專家ADIsimPLL是否可以仿真計算雙環鎖相環,如果可以具體怎么考慮,如果可以告訴我一些主環路環路帶寬的知識就更好了.
2019-03-07 10:34:03
本帖最后由 gk320830 于 2015-3-7 16:40 編輯
高速數字鎖相環的原理及應用
2012-08-17 10:47:04
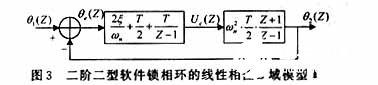
根據虛擬無線電技術的特點和鎖相環的基本原理,提出一種適于計算機軟件化實現的鎖相環數學模型,分析不同參數對鎖相環捕獲和跟蹤性能的影響,得出不同情況下參數設定的基
2008-08-15 12:36:19 101
101 本文在分析商用全數字鎖相環的常用技術和低頻信號的特點后,提出一種適用于低頻信號的基于CPLD的鎖相環實現方法。
2010-08-06 14:39:19118
數字信號處理器中D/A功能的實現
摘要:通過對脈寬調制(PWM)信號進行濾波處理,在TMS320F2407A型DSP中實現了D/A功能的
2009-07-11 10:47:241073 
數字信號處理器(DSP)
數字信號處理器(digital signal processor, 簡寫 DSP)是一種專用于(通常為實時的)數字信號處理的微處理器。
2010-01-04 10:54:543402 。本文基于坐標變換理論,提出一種通過電壓矢量變換的數字信號鎖相環,并將其應用在三相PWM整流器中。利用Matlab/Simulink對搭建的三相電壓型PWM整流器模型進行仿真。
2011-11-10 11:06:282192 
基于FPGA的數字鎖相環設計與實現技術論文
2015-10-30 10:38:359 Xilinx FPGA工程例子源碼:用FPGA實現數字鎖相環
2016-06-07 15:07:4537 基于DSP的軟件鎖相環的實現
2017-06-22 09:54:0669 的實時性和靈活性,因此利用FPGA實現數字信號處理成為數字信號處理領域的一種新的趨勢。 以往基于FPGA的數字信號處理系統的模型及算法采用VHDL或VerilogHDL等硬件描述語言描述。但這些硬件描述語言往往比較復雜,而采用Altera公司推出的專門
2017-10-31 10:37:230 鎖相環路是一種反饋控制電路,簡稱鎖相環( PLL)。鎖相環的特點是:利用外部輸入的參考信號控制環路內部振蕩信號的頻率和相位。因鎖相環可以實現輸出信號頻率對輸入信號頻率的自動跟蹤, 所以鎖相環通常
2020-08-06 17:58:2524 中采用的鎖相技術是基于數字信號處理技術在 DSP等通用可編程器件上的實現形式 ,由于這一類型鎖相環的功能主要通過軟件編程實現, 因此可將其稱為軟件鎖相環 (software PLL )。
2021-05-28 10:44:3533 模擬鎖相環和數字鎖相環的主要區別在于它們的控制方式不同。模擬鎖相環是通過模擬電路來控制頻率和相位,而數字鎖相環是通過數字信號處理技術來控制頻率和相位。此外,模擬鎖相環的精度較低,而數字鎖相環的精度較高。
2023-02-15 13:47:533623
正在加载...
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論