 電子發燒友App
電子發燒友App


數字輸出驅動器廣泛用于工業應用中的過程控制(PLC 系統)和樓宇自動化,也可用于任何使用 24V DC 系統進行控制的應用,例如電機控制、機器人和機械自動化。
乍一看,數字輸出驅動器是只有兩種輸出狀態的簡單器件:開或關;略微深入了解,就會發現,成功替代機械開關和繼電器能夠為工程師帶來諸多好處,例如可靠性、低功耗、簡單、較小尺寸、靈活性,可編程性,可以用其構建自動化、容錯控制系統。
Maxim 的數字輸出驅動器擁有高達 200kHz 的開關頻率、快速且安全的電感負載消磁、負載開路 / 低電壓 / 欠壓檢測、過流和過溫保護、看門狗定時器以及 SPI 檢錯。器件能夠承受高達 60V 電源尖峰脈沖、±1kV 浪涌脈沖,以及高達 12kV ESD 沖擊,工作在 -40°C 至+125°C 寬溫工作范圍。
本文中,我們討論如何有效利用 MAX14912/MAX14913 輸出驅動器的不同特性。為實現這一目的,我們討論系統設計師必須采取的決策,并了解綜合權衡因素和 MAX14912/MAX14913 提供的好處。
確定系統工作狀態
高邊(HS)或推挽(PP)式?
一般來說,推挽式工作方式用于高速通信,信號波形應具有陡峭的邊沿。該模式的缺點是輸出總處于工作狀態,為高電平或低電平,不能處于三態或具有高阻抗,除非使用 Global EN 引腳。
相反,高邊工作方式允許工程師將輸出置于高阻態,但信號波形很大程度上依賴于負載阻抗。高邊模式下也可以將輸出并聯,支持高達 9.6A 的較大負載。
因此,工作模式的選擇取決于具體的應用。
電源要求
MAX14912/MAX14913 支持從 12V 至 36V 的較寬范圍電源,所以能夠用于較寬范圍的應用,甚至用于電源要求較低以及容限更寬的系統。這樣可保證系統設計的可靠性和靈活性。
集成 5V DC-DC 轉換器省去了額外的電源,最大程度減少外部元件的數量,以及提高系統效率。系統中的其它器件可由該 5V DC 電源供電,該電源能夠為外部電路提供超過 100mA 的電流。
系統集成
數字輸出驅動器是低電壓 MCU/FPGA 與相對高電壓(12V 至 36V)外設器件之間的接口,外設的例子包括執行器、電機、照明燈、繼電器、LED 等。器件提供了對電壓和電流尖峰脈沖、電感或電容負載、磁干擾和靜態放電的高抗擾性。
此外,MAX14912/MAX14913 提供全面的診斷能力,包括熱關斷、開路檢測、低電源和欠壓檢測、過壓和過流保護。4 × 4 LED 驅動器矩陣可以對每通道的輸出狀態和故障狀態進行指示。
數字接口
MAX14912 和 MAX14913 支持兩種接口:并行和串行。系統設計師能夠靈活使用并行或串行接口進行控制,或者同時使用兩種接口。為便于理解接口,我們首先了解幾個全局配置引腳。
全局配置引腳
EN – 該引腳為高電平時,器件處于正常工作模式;該引腳為低電平時,禁止任何輸出操作,例如設置所有輸出為高阻態。
SRIAL – 該引腳為高電平時,使能串行(SPI)操作;該引腳為低電平時,使能并行操作。
PUSHPUL – 該引腳為高電平時,使能推挽式工作模式;該引腳為低電平或浮空時,所有輸出引腳處于高邊工作模式。
FLTR – 該引腳為高電平時,使能所有并行邏輯輸入和 CS 引腳上的尖峰脈沖濾波。
并行接口
并行接口是基于引腳的簡單接口,用于控制驅動器輸出。如果 SRIAL 引腳連接至地(SRIAL = 低電平),則通過并行接口控制器件。OUT_ 引腳的狀態由對應 IN_ 引腳和全局配置引腳控制:PUSHPL、FLTR 和 EN。在并行模式下控制 MAX14912/MAX14913,至少需要 9 個 GPIO 引腳:控制 8 個輸入引腳 IN_ 和 PUSHPL 引腳。FLTR 和 EN 引腳可始終保持為高電平。表 1 為引腳設置匯總。
并行模式引腳配置
注:MAX14913 在并行模式下不允許通過串行接口進行配置,而 MAX14912 即使在 SRIAL 為低電平時也可通過串行接口進行配置。該模式下可訪問除寄存器 0 之外的全部寄存器(參見下文的“串行接口”部分)。
通過串行接口進行配置的優先級比 PUSHPL 引腳設置高。邏輯電平 0 (低電平)或 1 (高電平)取決于 VL 輸入,1.6V 至 5.5V 有效。并行模式的缺點是缺少診斷信息。
串行接口
將 SRIAL 引腳驅動為 VL 電平(SRIAL = 高電平)時,使能 SPI 串行接口。串行模式下,所有輸出引腳由內部寄存器設置和輸入引腳控制。可通過串行接口引腳訪問寄存器:CS、CLK、SDI 和 SDO。詳細信息請參考 MAX14912/MAX14913 數據資料的串行接口部分。
循環冗余校驗(CRC)、看門狗和濾波等部分特性僅受 CRC/IN3、WDEN/IN5 和 FLTR 引腳的輸入邏輯控制,而負載開路檢測和輸出配置由 OL/IN1 和 PUSHPL 引腳的輸入邏輯控制或通過寄存器設置控制。
此外,CMND/IN2、CNFG/IN7 和 S16/IN8 的設置見表 2 中的匯總。
?SPI 接口模式選擇
直接模式
直接 SPI 模式下,不需要命令字節。16 位模式下,高字節控制輸出電平,低字節控制輸出配置。CNFG/IN7 和 S16/IN8 設置為低電平時,只能訪問寄存器 0;CNFG/IN7 和 S16/IN8 設置為高電平時,只能訪問寄存器 1 和寄存器 2。
直接模式寫操作期間,通過 SDO 引腳提供故障(F)和輸出電平(L)診斷信息。
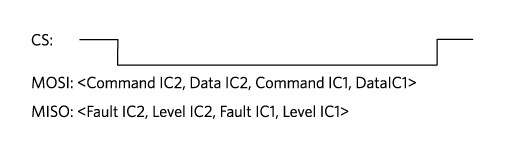
圖 1. 16 位直接 SPI 模式下的 SPI 周期。

16 位 SPI 直接模式位定義
總結:
S16/IN8 = 低電平,且 CNFG/IN7 = 低電平時,一個字節的串行數據控制 OUT_ 狀態;S16/IN8 = 低電平,且 CNFG/IN7 = 高電平時,一個字節的串行數據控制輸出模式:高邊或推挽式。
S16/IN8 = 高電平,且 CNFG/IN7 = 低電平時,兩個字節的串行數據控制 OUT_ 狀態和輸出模式配置:高邊或推挽式。
S16/IN8 = 高電平,且 CNFG/IN7 = 高電平時,第一個字節設置輸出配置(高邊 / 推挽),第二個字節使能 / 禁止負載開路檢測功能。
建議首先設置配置寄存器,然后再更新輸出電平。
注:返回的 F_ (故障)和 L_ (電平)信息針對之前寫入的命令。為了獲得實時故障和電平診斷信息,寫兩次。驅動器處于高邊模式且使能負載開路檢測時,無負載的 OUT_ 引腳由 75μA 電流上拉至 VDD 電平。在這種情況下,確定為 FAULT 條件。
命令模式
命令模式下,通過 SPI 接口提供所有特性和增強診斷信息。為設置為命令模式,CNMD/IN2 引腳必須為高電平。S16/IN8 和 CNFG/IN7 引腳輸入被忽略。命令包含命令字節和之后的數據字節。總共有六種命令類型(命令說明見表 4,寄存器映射見表 5)。更多信息請參考數據資料。
命令模式協議
注:所有故障寄存器只能由任意命令周期中設置 Z = 1 清除。
?寄存器映射
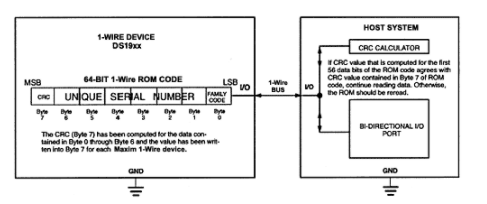
通信錯誤(CRC 檢測)
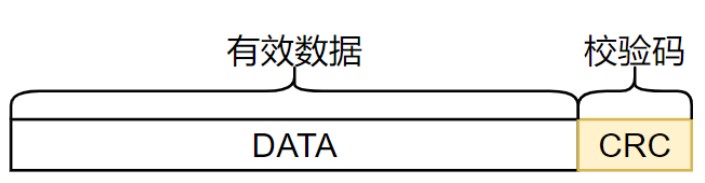
循環冗余校驗(CRC)是一種檢錯機制,可提高通信可靠性,以及避免意外執行錯誤命令。SPI 協議初始沒有任何檢錯能力,在惡劣工業環境下可能破壞串行數據。使能 CRC 檢測時(SRIAL= 高電平,CRC/IN3 = 高電平),來自 SPI 主機的所有命令之后必須有一個包括 7 位 CRC 編碼的附加字節,如圖 2 所示。
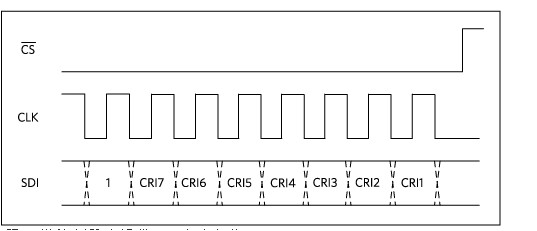
圖 2. 微控制器應提供 SDI 校驗字節
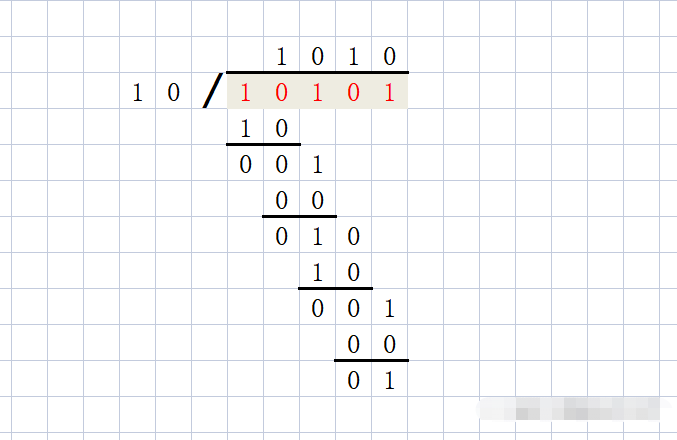
7 位 CRC 編碼,也稱為 CRC 幀校驗序列(FCS),根據生成多項式計算(x7 + x5 + x4 + x2 + x + 1)。MAX14900E 也使用相同的多項式。更多信息以及 CRC 計算的 C 語言示例代碼,請參考應用筆記 6002:“MAX14900E 八通道、高速工業開關的 CRC 編程”。
MAX14912 或 MAX14913 安裝好后,器件檢查接收到的數據是否存在誤碼,如果未檢測到錯誤則執行命令。如果從微控制器接收的 CRC 編碼與計算的 CRC 不一致,則忽略該命令,并置位寄存器 6 中的第 6 位 CRC 錯誤位。在下一個 SPI 幀將 CRC 錯誤報告給主機微控制器。
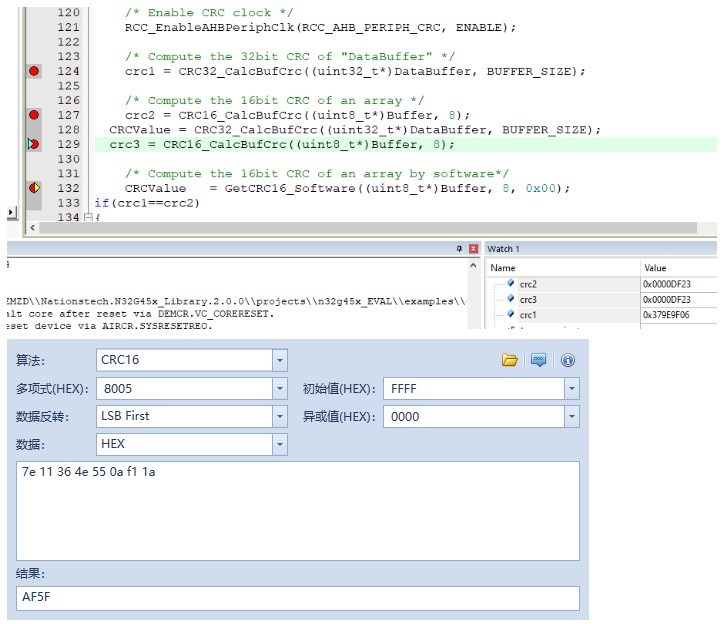
MAX14912EVKIT 評估軟件內置有 CRC 計算器。如果 CRC/IN3 引腳為高電平,自動計算 CRC 字節并附加到 SPI 命令幀。從 Option 菜單中選中 Show Status Log 選項后,可在 Status Log 窗口中看到。
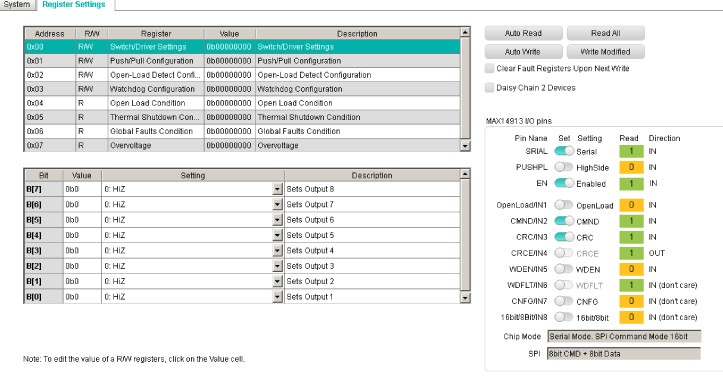
圖 3. 數字輸出驅動器 GUI 中的 CRC 計算。圖 3. 數字輸出驅動器 GUI 中的 CRC 計算。
在 CRC 計算器彈出式窗口中,可手動計算 CRC 編碼。進入 Help 菜單,點擊 CRC 計算器,將其調出。輸入字節 1 和字節 2 的值,然后點擊 Calculate CRC 按鈕,如圖 4 所示。
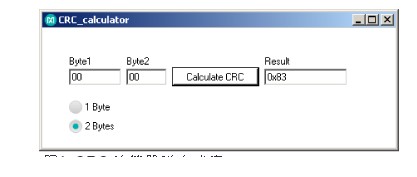
圖 4. CRC 計算器彈出式窗口。圖 4. CRC 計算器彈出式窗口。
多個 IC 的菊鏈配置
MAX14912 和 MAX14913 支持多個器件采用菊鏈配置,通過單命令方法控制 / 監測同一 SPI 總線上的所有器件。所有器件使用相同的 CLK 和 CS 信號;第一片器件的 SDI 引腳連接到主機的 MOSI 引腳,最后一片器件的 SDO 引腳連接到主機的 MISO 引腳。第一片器件的數據輸出(SDO)引腳連接到第二片器件的數據輸入(SDI)引腳,如圖 5 所示。其它器件通過類似的方式以菊鏈連接。
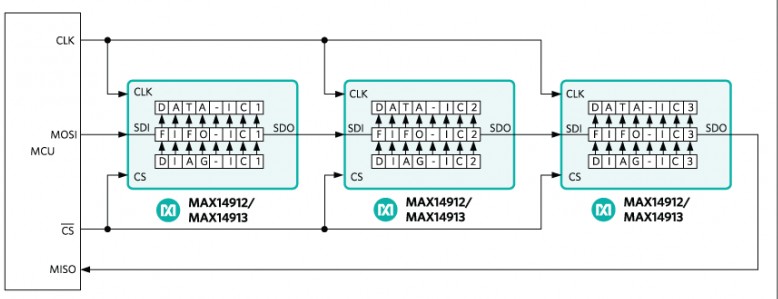
圖 5. 菊鏈連接。
MAX14912/MAX14913EVKIT 支持兩個評估板采用菊鏈連接,但相同的命令結構適用于三片或更多器件。
例如,16 位模式下兩片器件菊鏈連接的命令幀。
Daisy-chain devices
安裝評估板時,應使下一片器件 EVKIT #2 的 J24 連接頭連接到上一片器件 EVKIT #1 的 J23,如圖 6 所示。USB 電纜或外部主機應連接到 EVKIT #1。此外,EVKIT #1 的跳線 J26 必須處于位置 2 至 3,EVKIT #2 的跳線 J26 應處于位置 1 至 2。必須手動將 EVKIT #2 的跳線 J9、J5、J4、J22、J10、J6、J12、JMP1、J11、JMP2、J8 和 J3 的位置設置為與 GUI 中一致。更多信息請參考 MAX14912/MAX14913 數據資料和原理圖。
圖 6. 菊鏈連接的 MAX14912EVKIT。
如圖 7 所示,應選中菊鏈連接選擇框。
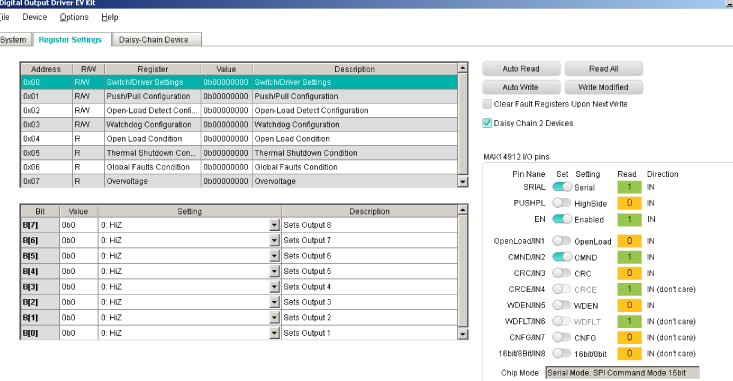
圖 7. 菊鏈操作。
菊鏈連接不僅對擴展輸出通道的數量沒有限制,而且也支持通過組合使用數字輸出驅動器和數字輸入接收器,構建更加復雜的系統。例如八通道數字輸入隔離器 / 串行器家族,MAX31910/MAX31913。
驅動電感負載
MAX14912 和 MAX14913 具有對電感負載進行安全消磁(SafeDemag)的功能,防止高邊模式下電感負載關斷時引起的反沖電壓損壞芯片。如果您需要驅動大電感,例如執行器、繼電器或電機,當電流由芯片通過負載流向地時,電感負載中儲存較大的能量。當高邊開關關斷造成電流終止時,能量轉換為 OUT_ 引腳上的負向尖峰脈沖。內部齊納二極管將尖峰脈沖箝位到(VDD -56V)。例如,如果 VDD = 24V,則將 OUT_ 引腳箝位到 -32V (相對于地)。在這種情況下,由于能量與|V x I|成比例,電感負載中儲存的能量將快速釋放。然而,能量越大,釋放需要的時間越長。在此時間期間,芯片的溫度可能會達到安全門限。為防止危險的熱擊穿,激活低邊開關,使能量釋放較小,直到內部溫度達到安全范圍。
? ? ? ?責任編輯:pj












 工商網監
工商網監
評論