單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。步進(jìn)電機(jī)是數(shù)字控制電機(jī),將脈沖信號(hào)轉(zhuǎn)換成角位移,電機(jī)的轉(zhuǎn)速、停止的位置取決于脈沖信號(hào)的頻
2011-01-19 21:24:16 12823
12823 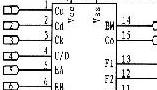
**步進(jìn)電機(jī)開環(huán)控制步進(jìn)電機(jī)開環(huán)伺服系統(tǒng)的一般構(gòu)成步進(jìn)電動(dòng)機(jī)的電樞通斷電次數(shù)和各相通電順序決定了輸出角位移和運(yùn)動(dòng)方向,控制脈沖分配頻率可實(shí)現(xiàn)步進(jìn)電動(dòng)機(jī)的速度控制。因此,步進(jìn)電機(jī)控制系統(tǒng)一般采用開環(huán)
2021-07-07 06:56:09
步進(jìn)電機(jī)控制系統(tǒng)的Simulink仿真模型,推薦大家學(xué)習(xí)參考。
2021-06-29 09:22:33
《計(jì)算機(jī)控制技術(shù)課程設(shè)計(jì)(論文)步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)》由會(huì)員分享,可在線閱讀,更多相關(guān)《計(jì)算機(jī)控制技術(shù)課程設(shè)計(jì)(論文)步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)(23頁(yè)珍藏版)》請(qǐng)?jiān)谌巳宋膸?kù)網(wǎng)上搜索。1、課 程 設(shè) 計(jì)
2021-09-01 07:50:15
步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)一個(gè)開環(huán)步進(jìn)電機(jī)控制系統(tǒng)。使得步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)。并能實(shí)現(xiàn)啟停、正反轉(zhuǎn)、調(diào)速控制。以及顯示速度。2.設(shè)計(jì)要求如下:①硬件測(cè)試通過(guò)。接線完成。三個(gè)芯片分別測(cè)試通過(guò)。步進(jìn)電機(jī)
2021-06-29 06:48:40
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應(yīng)用極為廣泛。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受
2023-03-01 10:29:10
為適應(yīng)步進(jìn)電機(jī)的運(yùn)動(dòng)控制領(lǐng)域需求,提出了步進(jìn)電機(jī)的全閉環(huán)控制系統(tǒng)。通過(guò)編碼器實(shí)時(shí)反饋,調(diào)整脈沖的輸出,采取相應(yīng)的辦法。 步進(jìn)電機(jī)由于結(jié)構(gòu)簡(jiǎn)單、維修方便、沒(méi)有積累誤差,運(yùn)行穩(wěn)定,而且制作
2016-01-11 15:55:53
求問(wèn)各位大神啊,基于單片機(jī)的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制系統(tǒng)怎么設(shè)計(jì)啊,用什么來(lái)實(shí)現(xiàn)細(xì)分驅(qū)動(dòng)啊,求一個(gè)思路。。
2017-02-05 10:58:32
基本完善了開題時(shí)碩士畢業(yè)論文的電機(jī)控制系統(tǒng)概念,實(shí)現(xiàn)了基于概念的仿真模型。記此文檔以備忘。異步電機(jī)矢量控制系統(tǒng)中電流環(huán)控制器至于什么時(shí)異步電機(jī)矢量控制系統(tǒng),這里就不贅述了。可以參考陳伯時(shí)教授的《運(yùn)動(dòng)控制系統(tǒng)》,講的很詳細(xì)。涉及到許多概念,包括何為坐標(biāo)變換,以及...
2021-09-06 09:26:56
步進(jìn)電機(jī)調(diào)速控制系統(tǒng)設(shè)計(jì)C語(yǔ)言程序及說(shuō)明.doc步進(jìn)電機(jī)調(diào)速控制系統(tǒng)設(shè)計(jì)C語(yǔ)言程序調(diào)速。實(shí)現(xiàn)控制功能以8051單片機(jī)為控制器,系統(tǒng)設(shè)四個(gè)按鍵“工作/停止按鍵”、“加速按鍵”、“減速按鍵”、“正反向控制按鍵”。系統(tǒng)上電后,按下“正反向控制按鍵”,控制電機(jī)正反轉(zhuǎn);每按一次“加速按鍵”后,步進(jìn)電機(jī)...
2021-07-05 07:05:35
;自動(dòng)售貨機(jī)VHDL程序與仿真; 出租車計(jì)價(jià)器VHDL程序與仿真 2004.8修改; 出租車計(jì)價(jià)器VHDL程序與仿真;波形發(fā)生程序; 步進(jìn)電機(jī)定位控制系統(tǒng)VHDL程序與仿真
2008-06-27 10:41:44
; 出租車計(jì)價(jià)器VHDL程序與仿真;波形發(fā)生程序; 步進(jìn)電機(jī)定位控制系統(tǒng)VHDL程序與仿真 [此貼子已經(jīng)被作者于2008-5-20 9:54:52編輯過(guò)]
2008-05-20 09:51:33
單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。步進(jìn)電機(jī)是數(shù)字控制電機(jī),將脈沖信號(hào)轉(zhuǎn)換成角位移
2021-04-01 16:47:56
` 本帖最后由 松山歸人 于 2021-4-8 16:06 編輯
大家下午好!繼續(xù)接著我們上期沒(méi)講完的內(nèi)容,今天我們繼續(xù)往下。上期回顧:基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)3 系統(tǒng)軟件設(shè)計(jì)3.1
2021-04-08 16:01:40
專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念概括步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)化為角位移或線位移的電磁機(jī)械裝置。步進(jìn)電機(jī)的穩(wěn)定性和可靠性直接影響到工業(yè)控制領(lǐng)域的精度,特別是在點(diǎn)膠點(diǎn)焊等高精度運(yùn)動(dòng)控制系統(tǒng)中,對(duì)于步進(jìn)電機(jī)的精度和穩(wěn)定性要求更高。所以說(shuō),對(duì)于步進(jìn)電機(jī)控制
2021-09-07 08:21:11
二相步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)1步進(jìn)電機(jī)介紹1.1步進(jìn)電機(jī)特點(diǎn)步進(jìn)電機(jī)(stepping motor)是將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)的角位移或線位移的一種特殊電機(jī)。電動(dòng)機(jī)每輸入一次電脈沖信號(hào),電動(dòng)機(jī)就轉(zhuǎn)動(dòng)一個(gè)
2021-09-10 08:11:50
步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)原理步進(jìn)電機(jī)控制系統(tǒng)硬件電路設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)軟件設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)的檢測(cè)
2021-03-03 07:47:32
求助畢業(yè)設(shè)計(jì)基于LabVIEW下的步進(jìn)電機(jī)自動(dòng)升降控制系統(tǒng)設(shè)計(jì)1.利用LabVIEW構(gòu)建信號(hào)發(fā)生和檢測(cè)裝置;2.合理的選擇測(cè)量元件; 3.控制系統(tǒng)的設(shè)計(jì)及調(diào)試;4.調(diào)速方案的測(cè)試與性能比較 最終設(shè)計(jì)出步進(jìn)電機(jī)的自動(dòng)升降系統(tǒng),控制工作臺(tái)使其控制精度達(dá)到±0.02;可不可以進(jìn)行純軟件仿真?一頭霧水中
2017-04-25 16:57:52
微型計(jì)算機(jī)論文微型計(jì)算機(jī)論宜賓學(xué)院 物理與電子工程學(xué)院 微型計(jì)算機(jī)課程設(shè)計(jì)(論文)Yibin University電子信息科學(xué)與技術(shù)專業(yè)微型計(jì)算機(jī)課程設(shè)計(jì)報(bào)告題 目 基于 Protues的步進(jìn)電機(jī)控制系統(tǒng)專 業(yè)
2021-09-10 08:03:39
基于STM32的步進(jìn)電機(jī)控制系統(tǒng)
2019-08-19 22:28:28
本帖最后由 南中南 于 2016-1-7 11:05 編輯
針對(duì)多步進(jìn)電機(jī)控制系統(tǒng)的要求,設(shè)計(jì)了基于STM32和MSP430的分布式多步進(jìn)電機(jī)控制系統(tǒng)。分享下
2016-01-07 10:16:17
基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)的設(shè)計(jì)基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)前 言步進(jìn)電機(jī)是一種進(jìn)行精確步進(jìn)運(yùn)動(dòng)的機(jī)電執(zhí)行元件,它廣泛應(yīng)用于工業(yè)機(jī)械的數(shù)字控制,為使系統(tǒng)的可靠性、通用性、可維護(hù)性
2021-06-29 09:51:59
基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)
2012-08-08 00:18:34
基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)摘要: 通過(guò)ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開環(huán)控制。在步進(jìn)電機(jī)控制器的設(shè)計(jì)中
2009-08-26 15:03:12
基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)的設(shè)計(jì)基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)前 言步進(jìn)電機(jī)是一種進(jìn)行精確步進(jìn)運(yùn)動(dòng)的機(jī)電執(zhí)行元件,它廣泛應(yīng)用于工業(yè)機(jī)械的數(shù)字控制,為使系統(tǒng)的可靠性、通用性、可維護(hù)性
2021-07-06 06:41:14
如何設(shè)計(jì)一個(gè)開環(huán)步進(jìn)電機(jī)控制系統(tǒng)?
2021-10-15 06:43:25
怎么實(shí)現(xiàn)基于51單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)?
2021-10-19 08:01:35
步進(jìn)電機(jī)是什么?步進(jìn)電機(jī)有哪些應(yīng)用?怎樣去設(shè)計(jì)一種基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)?怎樣去設(shè)計(jì)一種基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)?
2021-07-06 06:25:55
跪謝!!!求 基于AVR的智能窗簾控制系統(tǒng)(步進(jìn)電機(jī)ULN2003 ATmega16)
2015-05-13 10:22:21
VHDL語(yǔ)言特點(diǎn)和基本結(jié)構(gòu)是什么?如何去設(shè)計(jì)VHDL的密碼控制系統(tǒng)?怎樣對(duì)VHDL的密碼控制系統(tǒng)進(jìn)行仿真?
2021-04-30 06:57:48
的DIO控制電機(jī)向指定位置運(yùn)動(dòng)。 2 系統(tǒng)軟件設(shè)計(jì) 步進(jìn)電機(jī)控制系統(tǒng)程序流程如圖2所示,首先采集當(dāng)前步進(jìn)電機(jī)負(fù)載指針位置,得出當(dāng)前位置與指定位置的偏差,當(dāng)偏差 圖2 程序流程圖小于穩(wěn)態(tài)誤差(偏差
2019-04-09 09:40:01
萌新求助,求一個(gè)步進(jìn)電機(jī)控制系統(tǒng)的Simulink仿真模型
2021-10-18 08:17:21
步進(jìn)電機(jī)的工作原理是什么?怎樣去設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)的硬件部分?怎樣去設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)的軟件部分?步進(jìn)電機(jī)控制系統(tǒng)的端口地址有哪些?
2021-06-29 08:00:42
步進(jìn)電機(jī)具有控制簡(jiǎn)便、定位準(zhǔn)確等特點(diǎn)。隨著科學(xué)技術(shù)的發(fā)展,在許多領(lǐng)域?qū)⒌玫綇V泛的應(yīng)用。鑒于傳統(tǒng)的脈沖系統(tǒng)移植性不好,本文提出微機(jī)控制系統(tǒng)代替脈沖發(fā)生器和脈沖分配
2009-03-30 16:51:24 110
110 DSA和CAN總線的步進(jìn)電機(jī)控制系統(tǒng):步進(jìn)電機(jī)可直接接收脈沖信號(hào)的控制,適用于數(shù)字控制系統(tǒng)。
2009-04-02 11:12:4528 直線步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)說(shuō)明:介紹了直線步進(jìn)電機(jī)的優(yōu)點(diǎn)和組成。
2009-04-02 12:09:2735 介紹了一種基于單片機(jī)和微機(jī)的步進(jìn)電機(jī)控制系統(tǒng)。
2009-04-02 12:12:4317 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD 和鍵盤陣列, 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在X/
2009-04-06 17:12:3141 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):步進(jìn)電機(jī)控制器.vhd,直流電機(jī)控制器.vhd
2009-05-27 08:51:5462 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):
2009-05-27 10:23:0547 本文介紹由Intel 80C196KC 單片機(jī)和兩片PBL3717A 電機(jī)驅(qū)動(dòng)芯片構(gòu)成的二相步進(jìn)電機(jī)的控制系統(tǒng),包括了基于PBL3717A 芯片的電機(jī)驅(qū)動(dòng)的硬件電路設(shè)計(jì)和步進(jìn)電機(jī)的軟件控制程序。系統(tǒng)通
2009-08-19 11:46:1829 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng):通過(guò)ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開環(huán)控制。在步進(jìn)電機(jī)
2009-08-25 18:27:01102 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD和鍵盤陣列,構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿
2009-09-10 09:19:3033 設(shè)計(jì)了一種利用凌陽(yáng)SPCE061A單片機(jī)和微機(jī)控制步進(jìn)電機(jī)的控制系統(tǒng), 采用上、下位機(jī)控制步進(jìn)電機(jī)的多種運(yùn)行方式。程序采用模塊化設(shè)計(jì), 通過(guò)PC機(jī)容易實(shí)現(xiàn)各功能設(shè)置。系統(tǒng)實(shí)現(xiàn)
2010-01-11 16:31:0348 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL 為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA 內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速
2010-01-18 14:52:31314 本文介紹了一種的新型的步進(jìn)電機(jī)控制系統(tǒng),采用DSP作為控制器,構(gòu)建步進(jìn)電機(jī)的驅(qū)動(dòng)系統(tǒng),并在此基礎(chǔ)上實(shí)現(xiàn)細(xì)分角度和電流的實(shí)時(shí)運(yùn)算。利用其片內(nèi)集成的事件管理模塊通過(guò)軟
2010-02-21 14:14:0033 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速、減
2010-07-13 16:14:4045 摘要:介紹了一種基于微機(jī)和單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),利用上、下位機(jī)控制步進(jìn)電機(jī)的多種運(yùn)行方式,可實(shí)現(xiàn)步進(jìn)電機(jī)正反轉(zhuǎn)控制以及步進(jìn)電機(jī)的無(wú)級(jí)調(diào)速。程序采用模塊化設(shè)計(jì),通
2010-07-22 21:16:4176 任務(wù):設(shè)計(jì)并制作一個(gè)基于單片機(jī)高速高精度步進(jìn)電機(jī)控制系統(tǒng)。目標(biāo):1)完成單片機(jī)控制系統(tǒng)的控制電路、高速、高精度步進(jìn)電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì),提供相應(yīng)的電路原理圖
2010-08-08 17:29:27166 闡述密碼控制設(shè)計(jì)的基本原理。介紹了VHDL語(yǔ)言的特點(diǎn)以及基本的語(yǔ)法結(jié)構(gòu)。在MAX+plusⅡ開發(fā)軟件環(huán)境下,利用VHDL硬件描述語(yǔ)言實(shí)現(xiàn)密碼控制系統(tǒng)設(shè)計(jì),并對(duì)其系統(tǒng)各個(gè)模塊進(jìn)行仿真
2010-12-16 16:10:370 CIPH9803A五相步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)應(yīng)用
1 引言 CIPH9803A是一種可編程五相步進(jìn)電機(jī)控制芯片。該芯片具有步數(shù)設(shè)置(最大步數(shù)高達(dá)
2008-08-29 12:28:571433 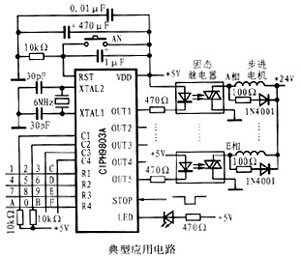
單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)
0 概述
步進(jìn)電機(jī)是一種將電脈沖信號(hào)變換成相應(yīng)的角位移或直線位移的機(jī)電執(zhí)行元件。控制步進(jìn)電機(jī)的輸入
2010-04-12 11:59:381658 
基于XC866的步進(jìn)電機(jī)閥門控制系統(tǒng)
2011-03-30 17:49:221949 
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。電子發(fā)燒友網(wǎng)整理了步進(jìn)電機(jī)控制系統(tǒng)的一些控制原理及步進(jìn)電機(jī)驅(qū)動(dòng)電路圖、步進(jìn)電機(jī)控制驅(qū)動(dòng)程序等知識(shí),較為翔實(shí)的介紹了步進(jìn)電機(jī)控制系統(tǒng)。
2012-06-18 16:52:56

步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0154 電機(jī)控制系統(tǒng)與simulink仿真電機(jī)控制系統(tǒng)與simulink仿真電機(jī)控制系統(tǒng)與simulink仿真電機(jī)控制系統(tǒng)與simulink仿真
2015-12-29 10:33:5872 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的研究....
2016-01-04 15:25:3923 基于模糊PID控制的步進(jìn)電機(jī)定位系統(tǒng)-2005。
2016-04-05 16:31:3025 FPGA學(xué)習(xí)資料,有興趣的同學(xué)可以下載看看。
2016-04-08 14:13:3833 基于TMS320LF2407的步進(jìn)電機(jī)控制系統(tǒng)
2016-04-25 17:07:534 步進(jìn)電機(jī)調(diào)速控制系統(tǒng)資料,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-28 15:45:3125 單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),采用的是C語(yǔ)言。
2016-04-28 10:46:3422 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),有需要的下來(lái)看看
2016-05-03 13:52:5946 步進(jìn)電機(jī)控制系統(tǒng)建模及運(yùn)行曲線仿真,下來(lái)看看
2016-05-04 14:09:5618 介紹了基于MSP430F149單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。在硬件部分 描述了該系統(tǒng)的硬件配置和工作原理; 在軟件部分分析了單片機(jī)控制程序和步進(jìn)電機(jī)運(yùn)動(dòng)的設(shè)計(jì)過(guò)程。該系統(tǒng)具有研制成本低且擴(kuò)展好的特點(diǎn)并具有軟件功能強(qiáng)、操作使用簡(jiǎn)便等優(yōu)點(diǎn)。
2016-05-06 14:12:232 步進(jìn)電機(jī)調(diào)速控制系統(tǒng)資料,很好設(shè)計(jì)資料,快來(lái)學(xué)習(xí)吧。
2016-05-09 17:10:0130 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)。
2016-05-25 14:03:3938 步進(jìn)電機(jī)課程設(shè)計(jì)------步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)報(bào)告
2016-06-17 14:59:5311 PLC的步進(jìn)電機(jī)控制系統(tǒng) 復(fù)雜的控制系統(tǒng)不僅I/O點(diǎn)數(shù)多,功能表圖也相當(dāng)復(fù)雜,除包括前面介紹的功能表圖的基本結(jié)構(gòu)外,還包括跳步與循環(huán)控制,而且系統(tǒng)往往還要求設(shè)置多種工作方式。
2016-08-24 16:52:028 本文以虛擬儀器技術(shù)為理論基礎(chǔ),應(yīng)用labVIEW 軟件替代硬件電路的方式,實(shí)現(xiàn)了步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。本文詳細(xì)介紹了利用485 串口進(jìn)行通信,采用labview 編程來(lái)實(shí)現(xiàn)控制步進(jìn)電機(jī)的正、反轉(zhuǎn)
2016-10-11 17:41:5920 步進(jìn)電機(jī)的單片機(jī)控制仿真和源程序【DOC】
2017-01-24 17:30:1389 基于Proteus的步進(jìn)電機(jī)控制系統(tǒng)仿真設(shè)計(jì)【PDF】
2017-01-26 11:14:5782 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)
2021-11-30 11:55:5827 集散控制在工業(yè)領(lǐng)域中具有廣泛的應(yīng)用,該文以2臺(tái)步進(jìn)電機(jī)為控制對(duì)象,完成了一套簡(jiǎn)單的集散控制系統(tǒng)的整體設(shè)計(jì),該系統(tǒng)由上位機(jī)(PC機(jī))和下位機(jī)(單片機(jī)控制系統(tǒng))組成,通過(guò)VisualBasic的串行通信
2017-09-08 13:52:3612 基于DSP的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)
2017-10-19 15:42:5623 摘 要 本文的主要工作是基于STM32步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。隨著越來(lái)越多的高科技產(chǎn)品逐漸融入了日常生活中,步進(jìn)電機(jī)控制系統(tǒng)發(fā)生了巨大的變化。單片機(jī)、C語(yǔ)言等前沿學(xué)科的技術(shù)的日趨成熟與實(shí)用化,使得
2017-11-27 18:49:3690 4線步進(jìn)電機(jī)控制 仿真+程序源代碼
2018-01-08 17:25:2616 Cortex-M3是ARM公司最新推出的基于ARMv7體系架構(gòu)的處理核。步進(jìn)電機(jī)已被廣泛的應(yīng)用于位置、速度等控制領(lǐng)域。文中基于Cortex-M3核設(shè)計(jì)了具有人機(jī)交互界面的步進(jìn)電機(jī)控制系統(tǒng)。整個(gè)系統(tǒng)
2018-02-20 16:55:001366 
1 系統(tǒng)設(shè)計(jì)原理 步進(jìn)電機(jī)控制系統(tǒng)主要由單片機(jī)、鍵盤LED、驅(qū)動(dòng)/放大和PC上位機(jī)等4個(gè)模塊組成,其中PC機(jī)模塊是軟件控制部分。為保護(hù)單片機(jī)控制系統(tǒng)硬件電路,在單片機(jī)和步進(jìn)電機(jī)之間增加過(guò)流保護(hù)電路
2018-10-18 16:26:018286 
本文檔的主要內(nèi)容詳細(xì)介紹的是電梯控制系統(tǒng)的VHDL程序與仿真免費(fèi)下載。
2020-12-18 16:46:0032 本文檔的主要內(nèi)容詳細(xì)介紹的是27個(gè)FPGA實(shí)例源代碼合集包括了:頻率計(jì)程序設(shè)計(jì)與仿真,LED控制VHDL程序與仿真,LED控制VHDL程序與仿真,基帶碼發(fā)生器程序設(shè)計(jì)與仿真,出租車計(jì)價(jià)器VHDL程序與仿真,步進(jìn)電機(jī)定位控制系統(tǒng)VHDL程序與仿真等等
2021-01-14 16:26:4866 本文檔的主要內(nèi)容詳細(xì)介紹的是步進(jìn)電機(jī)定位控制系統(tǒng)的VHDL程序與仿真資料免費(fèi)下載。
2021-01-20 14:26:0215 介紹基于FPGA 的步進(jìn)電機(jī)控制器的設(shè)計(jì), 在分析步進(jìn)電機(jī)的工作原理的基礎(chǔ)上, 給出了層次化設(shè)計(jì)方案與VHDL程序,并利用Quartus Ⅱ進(jìn)行了仿真并給出了仿真結(jié)果。它以FP GA 作為核心器件
2021-02-05 11:37:0027 基于PLC步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)說(shuō)明。
2021-05-19 10:01:07104 本文步進(jìn)電機(jī)原理及DSP控制方法,進(jìn)行了步進(jìn)電機(jī)速度控制系統(tǒng)的硬件和軟件設(shè)計(jì)。該系統(tǒng)是以DSP作為四線雙極性步進(jìn)電機(jī)的控制核心。此外,還設(shè)計(jì)了顯示模塊、功能按鍵等外圍模塊。本系統(tǒng)實(shí)現(xiàn)了對(duì)步進(jìn)電機(jī)
2021-06-07 09:11:3727 基于單片機(jī)恒溫控制系統(tǒng)程序和仿真設(shè)計(jì)(單片機(jī)仿真軟件)-基于單片機(jī)恒溫控制系統(tǒng)程序和仿真設(shè)計(jì),包含仿真和程序
2021-07-22 15:14:1686 基于89c51單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)
2021-08-31 10:10:4664 一種基于FPGA-的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì).pdf
2022-06-23 14:52:068 混合步進(jìn)電機(jī)和αSTEP混合控制系統(tǒng)
2023-03-07 16:58:19370 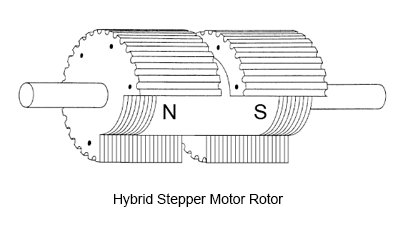
設(shè)計(jì)一個(gè)開環(huán)步進(jìn)電機(jī)控制系統(tǒng)。使得步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)。并能實(shí)現(xiàn)啟停、正反轉(zhuǎn)、調(diào)速控制。以及顯示速度。
設(shè)計(jì)要求如下: ①硬件測(cè)試通過(guò)。接線完成。三個(gè)芯片分別測(cè)試通過(guò)。步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)
2023-03-23 10:56:581 的發(fā)展也需要不斷的創(chuàng)新和技術(shù)進(jìn)步,以滿足不斷變化的市場(chǎng)需求和應(yīng)用挑戰(zhàn)。那控制系統(tǒng)程序如何設(shè)計(jì)?一、確定控制要求首先需要確定步進(jìn)電機(jī)控制系統(tǒng)的控制要求,包括控制精度、
2023-11-16 08:07:11464 
首先需要確定步進(jìn)電機(jī)控制系統(tǒng)的控制要求,包括控制精度、速度、轉(zhuǎn)向等方面。例如,在機(jī)械加工中,需要根據(jù)加工要求來(lái)確定步進(jìn)電機(jī)的步進(jìn)角度和轉(zhuǎn)速等參數(shù)。
2023-11-18 17:13:11856 該項(xiàng)目利用51單片機(jī)實(shí)現(xiàn)了一個(gè)步進(jìn)電機(jī)控制系統(tǒng),可以實(shí)現(xiàn)步進(jìn)電機(jī)的正反轉(zhuǎn)、加減速、啟動(dòng)和停止,并通過(guò)LCD顯示電機(jī)的工作狀態(tài)。通過(guò)該系統(tǒng),你可以控制步進(jìn)電機(jī)啟動(dòng)、旋轉(zhuǎn)的方向和速度。
2023-12-06 16:39:22968 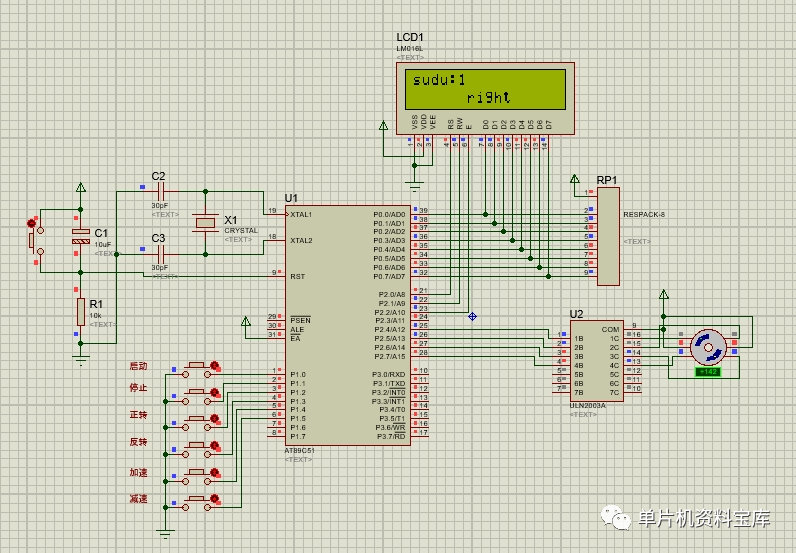
了一種以最少參數(shù)確定一條圓弧軌跡的插補(bǔ)方法和步進(jìn)電機(jī)變頻調(diào)速的方法。步進(jìn)電機(jī)控制系統(tǒng)的開發(fā)采用了軟硬件協(xié)同仿真的方法 可以有效地減少系統(tǒng)開發(fā)的周期和成本。最后給出了步進(jìn)電機(jī)控制系統(tǒng)的應(yīng)用實(shí)例。
2023-12-18 09:24:241
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論