步進(jìn)電機(jī)控制器電路
2010-02-05 15:32:40 2478
2478 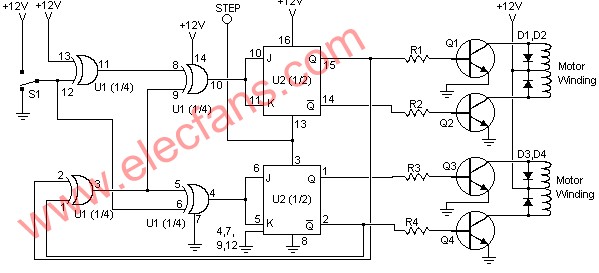
在本教程中,我們將步進(jìn)電機(jī)與PIC微控制器PIC16F877A連接。
2022-11-15 17:25:101016 
parameters of the controller setup program have been completed in subroutine.子程序中完成了激光器、程控衰減器和樣品移動(dòng)臺(tái)的步進(jìn)電機(jī)控制器...
2021-08-31 08:44:22
用單片機(jī)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)控制器。要求能對(duì)步進(jìn)電機(jī)實(shí)現(xiàn)正、反轉(zhuǎn)及速度控制,同時(shí)能對(duì)步進(jìn)電機(jī)進(jìn)行位置控制,即能控制步進(jìn)電機(jī)從一個(gè)位置精確地運(yùn)行到另一個(gè)位置。步進(jìn)電機(jī)為四相反應(yīng)式,軟件生成脈沖序列,可設(shè)
2012-12-08 15:50:26
用單片機(jī)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)控制器。要求能對(duì)步進(jìn)電機(jī)實(shí)現(xiàn)正、反轉(zhuǎn)及速度控制,同時(shí)能對(duì)步進(jìn)電機(jī)進(jìn)行位置控制,即能控制步進(jìn)電機(jī)從一個(gè)位置精確地運(yùn)行到另一個(gè)位置。步進(jìn)電機(jī)為四相反應(yīng)式,軟件生成脈沖序列,可設(shè)
2013-03-20 16:48:37
步進(jìn)電機(jī)控制器總結(jié)一、整體框架:系統(tǒng)在通信方式時(shí)支持主從控制二、系統(tǒng)原理1、 控制信號(hào)模塊電機(jī)控制信號(hào):EN——>電機(jī)使能信號(hào),只有當(dāng)該信號(hào)有效的時(shí)候,步進(jìn)電機(jī)才會(huì)工作DIR/CP+——>
2021-09-07 07:46:23
步進(jìn)電機(jī)與步進(jìn)電機(jī)控制器連接:A+:黑A-:綠B+:紅B-:藍(lán)電機(jī)控制器與arduino板連接:PUL-,DIR-,EN-連arduino的地EN+:脫機(jī)信號(hào),接地或者不接DIR+:控制轉(zhuǎn)動(dòng)方向,高電平正轉(zhuǎn)PUL+:控制脈沖...
2021-07-08 07:21:38
特點(diǎn)◆ 高性能、低價(jià)格◆ 采用獨(dú)特的控制電路,有效的降低了噪音,增加了轉(zhuǎn)動(dòng)平穩(wěn)性◆ 最高反應(yīng)頻率可達(dá)200Kpps ◆ 步進(jìn)脈沖停止超過100ms時(shí),線圈電流自動(dòng)減半,減小了許多場(chǎng)合的電機(jī)過熱◆ 雙
2008-11-07 16:10:51
01步進(jìn)電機(jī)驅(qū)動(dòng)控制器步進(jìn)電機(jī)驅(qū)動(dòng)器作為實(shí)驗(yàn)裝置可控的部分,能夠提供自動(dòng)測(cè)量的方法。前面已經(jīng)有兩款步進(jìn)電機(jī)驅(qū)動(dòng)器:SH-20403AXIS12雙軸藍(lán)牙移動(dòng)框架基于ESP8266WiFi步進(jìn)電機(jī)控制
2021-08-31 08:32:52
控制器硬件:一體化步進(jìn)電機(jī)控制器 modbus-rtu-485控制器云臺(tái)硬件:北京江云光電 DZY200RA100電動(dòng)旋轉(zhuǎn)云臺(tái)1,控制接線,連接RS485通信接線: USB轉(zhuǎn)485的 T/R+-
2021-08-31 08:26:26
SM1P步進(jìn)電機(jī)控制器怎么接線?
2021-10-09 07:33:24
江湖救急呀,大神們。小弟目前的任務(wù)是用labview來編寫步進(jìn)電機(jī)控制器程序,也就是編寫脈沖發(fā)生器的程序,不知道該如何開始,求大神們給點(diǎn)思路,多指點(diǎn)指點(diǎn)。多謝了。
2015-04-23 14:54:39
基于FPGA的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制設(shè)計(jì)一、基本要求:在理解步進(jìn)電機(jī)的工作原理以及細(xì)分原理的基礎(chǔ)上,利用FPGA實(shí)現(xiàn)四相步進(jìn)電機(jī)的8細(xì)分驅(qū)動(dòng)控制。二、評(píng)分標(biāo)準(zhǔn):1、設(shè)計(jì)方案介紹 (共15分)要求:詳細(xì)
2013-06-14 22:03:43
伺服電機(jī)控制器與步進(jìn)電機(jī)控制器有啥不一樣?
2021-02-25 07:42:10
誰有FPGA步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制設(shè)計(jì)資料,求共享
2014-04-30 09:35:17
控制器的輸出信號(hào)為雙脈沖,能否控制單脈步進(jìn)驅(qū)動(dòng)器驅(qū)動(dòng)兩相步進(jìn)電機(jī)?
2023-04-04 16:42:23
用vhdl語(yǔ)言做步進(jìn)電機(jī)的控制器。應(yīng)該如何入手呢?看了很多資料,各有各的思路,越看越混亂,要分成幾個(gè)模塊去做呢? 求大神帶!
2016-04-27 10:21:33
步進(jìn)電機(jī)是一種完全數(shù)字化的電動(dòng)執(zhí)行機(jī)構(gòu),從原理上說,其角位移與驅(qū)動(dòng)脈沖的個(gè)數(shù)成正比,在正常情況下,步進(jìn)電機(jī)具有使用簡(jiǎn)單、運(yùn)動(dòng)精確、連續(xù)運(yùn)行無累積誤差等特點(diǎn),因而被廣泛應(yīng)用于各種位置控制系統(tǒng)中。當(dāng)前
2019-09-19 06:55:10
現(xiàn)在市場(chǎng)上有基于FPGA的多電機(jī)運(yùn)動(dòng)控制器的成品嗎,注意是成品喲,成品!成品!成品!
2016-01-19 11:22:17
基于LabVIEW的步進(jìn)電機(jī)控制器的設(shè)計(jì)
2012-09-04 15:14:31
新人一枚,希望大家能發(fā)個(gè)關(guān)于 基于LabVIEW的步進(jìn)電機(jī)PID速度控制器 的文章,謝謝了!!!!
2015-04-20 20:34:47
本文提出了一種基于SOPC片上可編程的全數(shù)字化步進(jìn)電機(jī)控制系統(tǒng),本系統(tǒng)是以FPGA為核心控制器件,將驅(qū)動(dòng)邏輯功能模塊和控制器成功地集成在FPGA上實(shí)現(xiàn),充分發(fā)揮了硬件邏輯電路對(duì)數(shù)字信號(hào)高速的并行處理
2021-05-06 06:34:07
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
如何利用HMI USART串口屏做一個(gè)步進(jìn)電機(jī)控制器呢?其代碼該怎樣去實(shí)現(xiàn)呢?
2021-12-23 06:55:13
一、工程簡(jiǎn)介1、本工程實(shí)現(xiàn)的功能:用FPGA通過兩個(gè)按鍵控制步進(jìn)電機(jī)的啟動(dòng)和停止,硬件包括:黑金開發(fā)板、步進(jìn)電機(jī)和Vince步進(jìn)電機(jī)驅(qū)動(dòng)器和電腦。2、FPGA通過控制電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)的旋轉(zhuǎn)
2021-07-08 07:41:16
本文介紹通過FPGA實(shí)現(xiàn)的步進(jìn)電機(jī)控制器。該控制器可以作為單片機(jī)或DSP的一個(gè)直接數(shù)字控制的外設(shè),只需向控制器的控制寄存器和分頻寄存器寫入數(shù)據(jù),即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2021-04-29 06:05:44
步進(jìn)電機(jī)控制器能夠發(fā)出均勻脈沖信號(hào),它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。驅(qū)動(dòng)器所接收
2020-10-05 09:00:33
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線型,CAN總線型等,通過編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-08-31 08:09:29
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器到底長(zhǎng)什么樣?
2021-10-28 07:46:29
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線型,CAN總線型等,通過編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-08-31 07:06:25
本文采用Verilog FPGA設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語(yǔ)言編程實(shí)現(xiàn)的控制算法,驅(qū)動(dòng)步進(jìn)電機(jī),對(duì)懸掛運(yùn)動(dòng)物體進(jìn)行精確的控制。
2021-05-06 07:11:03
STM32發(fā)出脈沖一般有哪幾種方式?怎樣通過控制器輸入脈沖去控制步進(jìn)電機(jī)呢?
2021-12-21 06:25:47
求大神分享SM1P步進(jìn)電機(jī)控制器操作說明
2021-10-09 07:40:22
Arduino 2560控制兩個(gè)步進(jìn)電機(jī)用arduino和步進(jìn)電機(jī)控制器驅(qū)動(dòng)兩個(gè)步進(jìn)電機(jī),具體的接線過程和怎樣連接都在圖片上。準(zhǔn)備工具:兩個(gè)步進(jìn)電機(jī)(我用的是J42):Arduino板(我用
2021-08-31 06:13:29
描述硬盤步進(jìn)電機(jī)速度控制器這個(gè)想法來自控制步進(jìn)電機(jī)的需要,而不需要復(fù)雜的編程或微控制器和其他復(fù)雜的 IC,我想找到最便宜的解決方案。PCB
2022-08-05 06:29:44
想求一個(gè)FPGA控制步進(jìn)電機(jī)的程序。非常感謝。
2019-05-27 04:13:24
跪求!!求基于LabVIEW步進(jìn)電機(jī)PID速度控制器的設(shè)計(jì)
2015-04-21 15:52:00
基于GAL器件的步進(jìn)電機(jī)控制器的研究與設(shè)計(jì)
采用GAL控制脈沖分配的邏輯設(shè)計(jì)若采用集成電路芯片來實(shí)現(xiàn)三相六拍步進(jìn)電機(jī)的控制,所用器件較多! 電路一般比較復(fù)雜# 為
2008-10-21 01:53:23 42
42 本文說明了基于FPGA的步進(jìn)電機(jī)的控制原理。
2009-04-02 16:39:3850 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):步進(jìn)電機(jī)控制器.vhd,直流電機(jī)控制器.vhd
2009-05-27 08:51:5462 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):
2009-05-27 10:23:0547 美國(guó)Allegro 公司推出的A3972 型串口控制器是步進(jìn)電機(jī)微步距驅(qū)動(dòng)專用電路。一個(gè)A3972 外加一個(gè)CPU 即可實(shí)現(xiàn)步進(jìn)電機(jī)的微步距驅(qū)動(dòng),本文用VHDL 語(yǔ)言對(duì)FPGA 進(jìn)行編程仿真,產(chǎn)生A3972
2009-12-19 16:05:5731 GY8608 CAN 總線接口的雙路步進(jìn)電機(jī)控制器:1、CAN 總線接口,可通過同時(shí)控制2 路步進(jìn)電機(jī)。2、如果只控制一路步進(jìn)電機(jī),最大工作頻率25khz。3、如果同時(shí)控制兩路步進(jìn)電機(jī),則
2010-01-14 18:40:1434 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL 為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA 內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速
2010-01-18 14:52:31314 FPGA在步進(jìn)電機(jī)任意細(xì)分驅(qū)動(dòng)中的應(yīng)用
摘要:介紹一種采用FPGA 輸出PWM控制信號(hào)對(duì)步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)的實(shí)現(xiàn)方法。利用FPGA 中的嵌入式EAB 構(gòu)成LPM-ROM,存放步進(jìn)電機(jī)各
2010-05-11 16:55:2048 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速、減
2010-07-13 16:14:4045 控制步進(jìn)電機(jī)的現(xiàn)場(chǎng)總線端子-集成的步進(jìn)電機(jī)控制器:用于新驅(qū)動(dòng)技術(shù)的總線端子為最高功率為200W 的小型步進(jìn)電機(jī)提供了運(yùn)動(dòng)控制解決方案。KL2531和KL2541 步進(jìn)電機(jī)端子便是用于傳
2010-10-06 09:52:5741 TMC428是TRINAMIC公司最新開發(fā)的步進(jìn)電機(jī)運(yùn)動(dòng)控制器,它可減少電機(jī)控制軟件設(shè)計(jì)的工作量,降低開發(fā)成本。以它為核心(包括TMC236型步進(jìn)電機(jī)驅(qū)動(dòng)器)構(gòu)成的3軸步進(jìn)電機(jī)驅(qū)動(dòng)
2010-12-03 15:47:2971 FPGA在步進(jìn)電機(jī)控制中的應(yīng)用
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過控制脈沖數(shù)來控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可
2009-12-24 16:52:261645 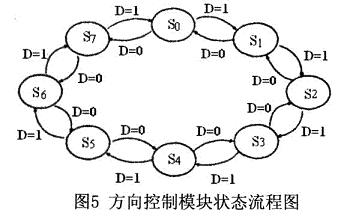
根據(jù)Nios II處理器的Avalon總線規(guī)范,設(shè)計(jì)了一款面向步進(jìn)電機(jī)的控制器IP核。該定制IP核采用軟、硬件協(xié)同設(shè)計(jì)的方法,功能符合Avalon總線的讀寫傳輸時(shí)序,具有完備的步進(jìn)電機(jī)驅(qū)動(dòng)能力。仿
2011-12-23 14:02:3244 很不錯(cuò)的資料,基于FPGA的步進(jìn)電機(jī)控制,希望對(duì)大家學(xué)習(xí)有幫助。
2016-03-21 17:23:538 基于FPGA的電機(jī)控制,同時(shí)控制步進(jìn)電機(jī)和伺服電機(jī)。
2016-03-21 17:09:1442 TMC428型3軸步進(jìn)電機(jī)控制器的原理及應(yīng)用
2016-04-25 10:10:0728 基于SOPC的步進(jìn)電機(jī)加減速PWM控制器IP核設(shè)計(jì)
2016-05-03 13:52:5918 步進(jìn)電機(jī)控制器,感興趣的小伙伴們可以看一看。
2016-08-23 16:23:3216 、反饋裝置、驅(qū)動(dòng)放大器、運(yùn)動(dòng)控制器組合成一個(gè)整體。其優(yōu)勢(shì)為:體積小、故障率低、無需匹配電機(jī)和驅(qū)動(dòng)控制器,使用簡(jiǎn)單,系統(tǒng)設(shè)計(jì)和維護(hù)方便,大大減少產(chǎn)品開發(fā)時(shí)間。 然而國(guó)外的一體化步進(jìn)系統(tǒng)售價(jià)高昂,一般在200到1000美
2017-11-01 10:16:015 的步進(jìn)電機(jī)多軸控制器是以微控制器(MCU)/微處理器(MPU)/專用集成電路(ASIC)/數(shù)字信號(hào)處理器(DSP)為核心,再輔以其他外圍分立器件構(gòu)成的。這種結(jié)構(gòu)的步進(jìn)電機(jī)多軸控制器的優(yōu)點(diǎn)在于其硬件結(jié)構(gòu)清晰,易于復(fù)制再現(xiàn),對(duì)于類
2017-11-08 14:21:4512 意法半導(dǎo)體新推出的步進(jìn)電機(jī)控制芯片L6470在一顆芯片上集成了功率級(jí)和一個(gè)數(shù)字控制內(nèi)核。這款步進(jìn)電機(jī)控制芯片能夠通過SPI接口接收微控制器的運(yùn)動(dòng)曲線命令,按照預(yù)制的加速度和速度曲線自動(dòng)執(zhí)行運(yùn)動(dòng),還能自動(dòng)加快電機(jī)的運(yùn)轉(zhuǎn)速度,并使之保持預(yù)設(shè)的轉(zhuǎn)速。
2018-07-19 07:07:002411 
提出一種應(yīng)用現(xiàn)場(chǎng)可編程門陣列(FPGA)實(shí)現(xiàn)多軸步進(jìn)電機(jī)控制器的方法。采用IP設(shè)計(jì)思想,步進(jìn)電機(jī)的運(yùn)動(dòng)控制由硬件電路(步進(jìn)電機(jī)IP核)實(shí)現(xiàn),軌跡計(jì)算由同一芯片上的微處理器(Nios II軟核)實(shí)現(xiàn)
2017-12-06 10:41:3023 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4726 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2018-09-16 09:48:192770 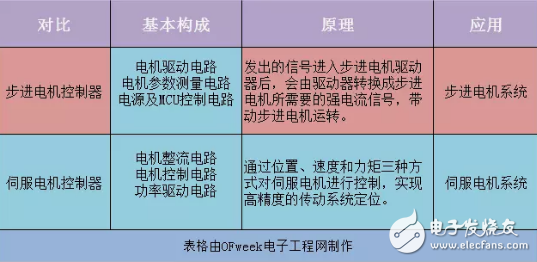
該項(xiàng)目旨在通過制造模塊化控制器來簡(jiǎn)化步進(jìn)電機(jī)的使用,該模塊化控制器可以輕松驅(qū)動(dòng)步進(jìn)電機(jī),而無需使用微控制器來完成工作。
2019-08-08 11:52:0317706 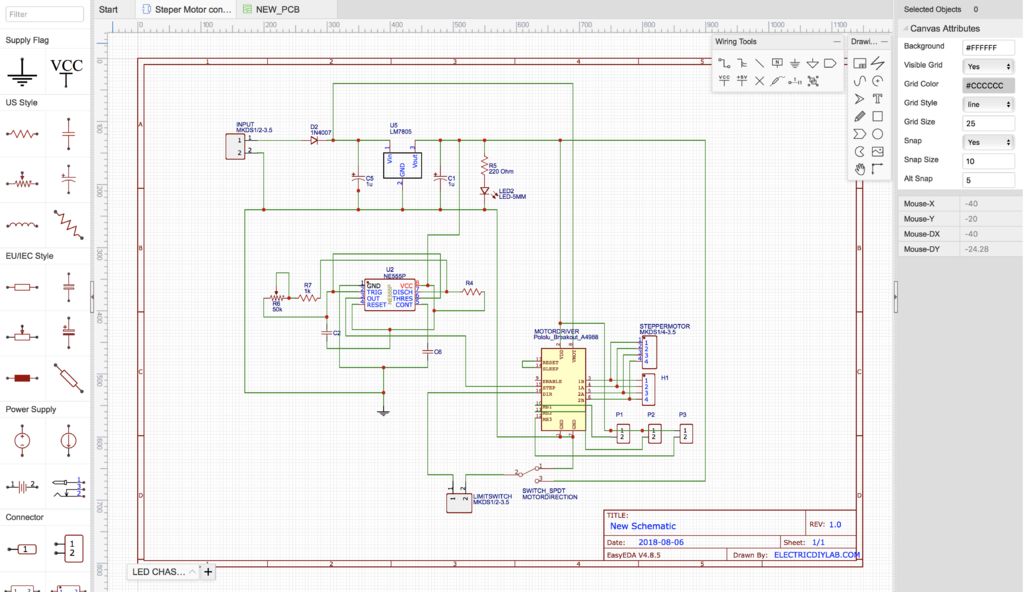
步進(jìn)電機(jī)控制器是一種能夠發(fā)出平均脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2019-10-01 15:10:005488 
步進(jìn)電機(jī)控制器接線圖如下:接線之前我們需要大概了解,控制器需要發(fā)送什么信號(hào),才能控制驅(qū)動(dòng)器,進(jìn)而操縱電機(jī)。
2019-10-01 08:51:0014742 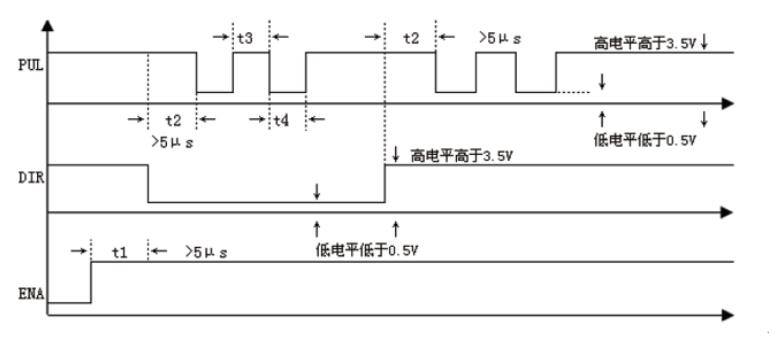
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-10-01 08:58:0015865 步進(jìn)電機(jī)控制器:它是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-12-10 08:49:067858 ,并把斬波控制電路集成到FPGA 內(nèi)部,極大地提高了系統(tǒng)的集成度和穩(wěn)定性。微控制器只需提供細(xì)分?jǐn)?shù)等參數(shù),就能精確控制步進(jìn)電機(jī)的運(yùn)行,特別適用于某些實(shí)時(shí)控制場(chǎng)合。
2020-07-24 16:51:3928 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2020-12-14 20:26:091309 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2021-01-31 06:17:2415 介紹基于FPGA 的步進(jìn)電機(jī)控制器的設(shè)計(jì), 在分析步進(jìn)電機(jī)的工作原理的基礎(chǔ)上, 給出了層次化設(shè)計(jì)方案與VHDL程序,并利用Quartus Ⅱ進(jìn)行了仿真并給出了仿真結(jié)果。它以FP GA 作為核心器件
2021-02-05 11:37:0027 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)并且運(yùn)用范圍廣泛的電機(jī)控制器,步進(jìn)電機(jī)控制器怎么使用?下面就由小編來簡(jiǎn)單介紹一下!
2021-07-19 09:52:575456 的發(fā)展,步進(jìn)電機(jī)的需求量與日俱增,在各個(gè)國(guó)民經(jīng)濟(jì)領(lǐng)域都有應(yīng)用。 步進(jìn)電機(jī)控制系統(tǒng)由步進(jìn)電機(jī)控制器、步進(jìn)電機(jī)驅(qū)動(dòng)器、步進(jìn)電機(jī)三部分組成,步進(jìn)電機(jī)控制器是指揮中心,它發(fā)出信號(hào)脈沖給步進(jìn)電機(jī)驅(qū)動(dòng)器,而步進(jìn)電機(jī)驅(qū)動(dòng)器把接
2021-07-19 15:49:3311901 本文檔作備份用。摘 要: 設(shè)計(jì)了一種具有多模式的步進(jìn)電機(jī)控制裝置,本裝置基于STC的一款單片機(jī)STC89C52,軟件部分由C51編寫,包含啟停中斷程序、轉(zhuǎn)向中斷程序、步進(jìn)電機(jī)調(diào)速程序以及鍵盤信號(hào)
2021-11-23 16:22:5118 引出MCU是 stm32F407ZGT6 最小系統(tǒng)板根據(jù)步進(jìn)電機(jī)控制器的資料可以知道 步進(jìn)電機(jī)的速度和轉(zhuǎn)過的角度都是通過 PUL + 和PUL- 來控制的(這里...
2021-12-05 12:51:160 有多種版本的步進(jìn)電機(jī)類型,也有多種版本的步進(jìn)電機(jī)控制器設(shè)計(jì)。本電路是一款使用ICTDA2030作為驅(qū)動(dòng)器的通用步進(jìn)電機(jī)控制器。
2022-06-04 17:17:002478 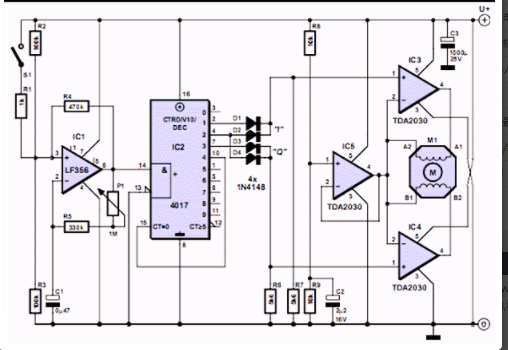
一種基于FPGA-的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì).pdf
2022-06-23 14:52:068 電子發(fā)燒友網(wǎng)站提供《硬盤步進(jìn)電機(jī)速度控制器.zip》資料免費(fèi)下載
2022-07-22 11:29:022 MS35711T 器件是一款步進(jìn)電機(jī)控制器, 它使用外部 N 溝道 MOSFET 來驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī)或兩個(gè)刷式直流電機(jī)。
2022-07-31 10:26:464 電子發(fā)燒友網(wǎng)站提供《PCB設(shè)備步進(jìn)電機(jī)控制器.zip》資料免費(fèi)下載
2022-08-22 16:17:530 電子發(fā)燒友網(wǎng)站提供《如何測(cè)試TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器控制器和步進(jìn)電機(jī).zip》資料免費(fèi)下載
2022-12-06 15:51:083 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所
需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-03-23 10:24:221 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,可以用來控制步進(jìn)電機(jī)的轉(zhuǎn)速和方向。步進(jìn)電機(jī)控制器通常包括一個(gè)驅(qū)動(dòng)電路板和一個(gè)控制板,驅(qū)動(dòng)電路板用于提供電源和輸出脈沖信號(hào),控制板則用于控制步進(jìn)電機(jī)的運(yùn)行。
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置一般包括以下幾個(gè)方面:
2023-03-26 22:30:201184 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:034 電子發(fā)燒友網(wǎng)站提供《步進(jìn)電機(jī)控制器的FPGA的實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-07 16:29:171 電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:10:400 控制,需要使用步進(jìn)電機(jī)控制器。步進(jìn)電機(jī)控制器是一種電子裝置,用于接收和處理控制信號(hào),并將其轉(zhuǎn)換為電機(jī)驅(qū)動(dòng)信號(hào)。通過調(diào)整步進(jìn)電機(jī)控制器的參數(shù)設(shè)置,可以使電機(jī)按照需求進(jìn)行旋轉(zhuǎn),實(shí)現(xiàn)精確的運(yùn)動(dòng)控制。 在進(jìn)行步進(jìn)電
2024-01-19 10:50:22503 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,主要用于控制步進(jìn)電機(jī)的運(yùn)動(dòng)。它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2024-02-07 17:57:00651 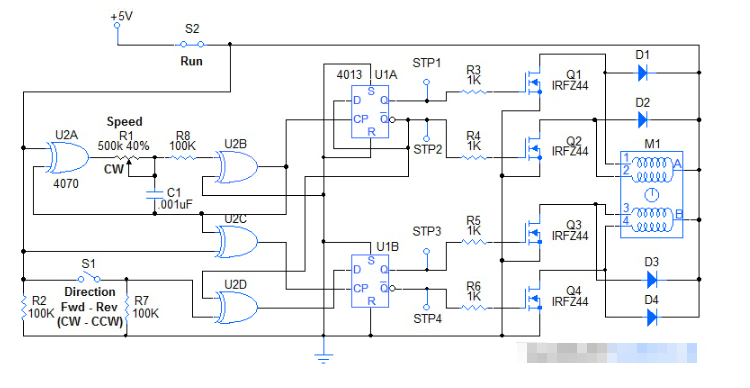
正在加载...
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論