請問各位大俠,誰知道368能夠驅動的wifi芯片啊?或者誰做個帶wifi模塊的368攝像機啊?跪謝!!!!
2013-09-27 21:15:11
` “火紅六月”為價格而“尖叫”!智能云網(wǎng)絡攝像機手機專享,滿足發(fā)燒友的實時監(jiān)控。手機監(jiān)控:下載“iSmartViewPro”軟件到手機并安裝,就可以隨時隨地掌控我們的生活。 手機應用界面:攝像機
2014-06-08 12:28:46
雙目立體視覺(BinocularStereoVision)是機器視覺的一種重要形式,因其可簡單地利用左右攝像機中的圖像信息計算得到相機視野中物體相對于攝像機的深度信息使得該技術擁有廣泛的應用前景
2021-12-23 07:19:52
攝像機標定是什么?如何對攝像機標定進行分類?傳統(tǒng)攝像機標定方法分為哪些?攝像機自標定方法有哪些?
2021-04-13 06:10:19
DVR攝像機的同步方式一般有內同步、電源同步和外同步。 內同步(INT)是利用攝像機內部的晶體振蕩電路產(chǎn)生同步信號來完成操作。電源同步(LL,Line Locked),也稱之為線性鎖定或行鎖定
2011-03-04 11:04:24
40多年前,美國安培(Ampex)公司推出了世界上第一臺實用型攝像機,開創(chuàng)了圖像記錄的新紀元。由于當時的攝像機
2008-09-05 16:20:27
現(xiàn)在市場上有很多的攝像機,攝像機是用來監(jiān)控的,可以使用在商場,超市,公司等地方。那么光有攝像機還不行因為只有攝像機沒有其它的東西那么攝像機是不可能起到監(jiān)控的作用的,想要攝像機起到監(jiān)控的作用就需要
2012-10-30 15:40:11
現(xiàn)在隨著科技的發(fā)展有有很多的電子產(chǎn)品發(fā)展了起來,而這些電子產(chǎn)品給人們的日常生活,財產(chǎn)安全帶來了很大的保障。給人們的財產(chǎn)安全帶來保障的是攝像機,因為自己可以在屋里安裝攝像機,攝像機可以監(jiān)控。如果屋里有
2012-10-29 16:14:36
(http://www.ztwl.cn/)1. 什么是 CCD攝像機?  
2009-05-26 09:58:48
1. 什么是CCD攝像機? CCD是Charge Coupled Device(電荷耦合器件)的縮寫,它是一種半導體成像器件,因而具有靈敏度高、抗強光、畸變小、體積小、壽命長、抗震動等優(yōu)點
2008-06-16 15:10:19
MS41908M 網(wǎng)絡攝像機·監(jiān)控攝像機用鏡頭驅動芯片(內置光圈控制)MS41908M 是一款用于網(wǎng)絡攝像機和監(jiān)控攝像機的鏡頭驅動芯片。 芯片內置光圈控制功能;通過電壓驅動方式以及扭矩紋波修正技術
2021-02-28 14:29:36
MS41909MS41909MS41909產(chǎn)品描述:MS41909 是一款用于網(wǎng)絡攝像機和監(jiān)控攝像機的鏡頭驅動芯片。通過電壓驅動方式以及扭矩紋波修正技術,實現(xiàn)了超低噪聲微步驅動。產(chǎn)品特點:電壓驅動
2019-09-06 09:53:41
SDI,HDMI類似接口的攝像機如何接入linux系統(tǒng)?
2020-04-07 22:58:06
USB 攝像機支持 GOLDBOX
2023-04-21 06:43:17
ZeroLink技術網(wǎng)絡攝像機作者 江 勇【摘要】隨著智能家居,物聯(lián)網(wǎng)產(chǎn)業(yè)的快速發(fā)展,傳統(tǒng)網(wǎng)絡攝像機廠家的目光不約而同的聚焦到家庭視頻監(jiān)控領域,并且為之增加云存儲,大數(shù)據(jù),智能控制等新新概念。聯(lián)想
2015-08-09 12:08:04
摘要:主要介紹低照度監(jiān)控攝像機的技術原理、應用等,對比低照度監(jiān)控攝像機與紅外攝像機的異同。當今,大眾對監(jiān)控產(chǎn)品要求越來越高,不僅要實現(xiàn)全天候24小時監(jiān)控,還要在照明條件不足的情況下呈現(xiàn)清晰的圖像效果
2010-06-30 11:12:34
求教,怎么用labview控制攝像機啊,控制攝像機的拍攝,傳輸圖片,讀取圖片
2011-09-28 15:25:20
labview支持那種攝像機開發(fā)?那種安防的路邊監(jiān)控一體機,請大神們指教,問了好多支持C,C#的,沒有l(wèi)abview的
2016-03-02 10:49:07
項目名稱:圖像處理-攝像頭標定試用計劃:香蕉派基于OPENCV的安裝教程網(wǎng)上幾乎都是基于apt-get install安裝的,這種安裝方式有個非常大的缺項就是還有很多庫不能被支持,造成無法使用完
2017-04-10 15:42:05
因為我們使用的是Qt+opencv 進行攝像頭項目環(huán)境的搭建去對雙目攝像頭進行測試。目前我用的是Qt5, opencv 使用的是oepcv3.4在安裝了qt和opencv之后,我們開始運行
2020-09-26 21:54:29
` 經(jīng)過申請,收到了雙目攝像頭,這次主要是通過雙目攝像頭搭載linux操作系統(tǒng),基于Qt+Opencv庫進行圖形算法的識別。本次很榮幸可以參加這次的試用體驗活動。好了,下面就開始對USB雙目攝像
2020-09-02 09:52:23
雙目視覺的原理:由于視差原理,左右兩個ccd的位置固定,若能測量空間中同一個點P在左右兩個ccd中圖像的位置,則根據(jù)三角原理,可以求得P點在空間中的坐標位置。可用于攝像頭實現(xiàn)空間點的距離測量。下圖
2021-09-27 16:52:18
這個程序是在VS2013下編寫的,用OpenCv3.00的平臺,攝像機是大恒的HV1351UM,只實現(xiàn)了圖像的采集,并沒有圖像處理的功能在里面。
2017-03-21 21:07:20
回收康耐視相機工業(yè)CCD相機,工業(yè)攝像機,工業(yè)數(shù)字攝像機,工業(yè)CCD攝像機,工業(yè)攝像頭,工業(yè)數(shù)字攝像頭,工業(yè)CCD攝像頭,1394接口工業(yè)相機,1394接口工業(yè)攝像機,1394接口工業(yè)CCD攝像機
2021-10-20 14:00:31
Dragoboard410c開發(fā)板為平臺進行簡單的3D視覺實驗,這里我們將涉及到3D視覺中的攝像機標定、姿勢估計、對極集合和3D圖像中的深度地圖等內容。 這篇blog主要向大家介紹攝像機標定涉及到的一些基礎概念
2018-09-28 10:32:24
基于ML86500的網(wǎng)絡攝像機該如何去設計?
2021-05-31 06:11:29
利用LABVIEW視覺模塊完成攝像機標定,一般需要哪些vi?相關參數(shù)怎么設置?
2015-05-17 17:24:58
幾何模型參數(shù)就是攝像機參數(shù)。在大多數(shù)條件下,這些參數(shù)必須通過實驗與計算才能得到,這個過程被稱為攝像機定標(或稱為標定)。標定過程就是確定攝像機的幾何和光學參數(shù),以及攝像機相對于世界坐標系的方位。由于
2019-06-04 08:00:00
`深圳市視威克科技有限公司,是一家安防監(jiān)控設備專業(yè)制造商。集研發(fā)、生產(chǎn)、銷售防水攝像機、低照度攝像機、網(wǎng)絡攝像機、DVR、NVR、監(jiān)控平臺等全系列安防監(jiān)控設備和服務為一體的高科技企業(yè)。視威克的產(chǎn)品
2013-09-14 10:48:24
如何選擇一款物美價廉的監(jiān)控攝像機?我們要先了解它的基本構造,首先我們由內到外幫你全方位的分析一下監(jiān)控攝像機的組成部件和基本結構,讓您對監(jiān)控攝像機有一個立體的基本認識。 一款攝像機拿來,我們首先
2011-02-23 16:38:40
如何選擇一款物美價廉的監(jiān)控攝像機?我們要先了解它的基本構造,首先我們由內到外幫你全方位的分析一下監(jiān)控攝像機的組成部件和基本結構,讓您對監(jiān)控攝像機有一個立體的基本認識。 一款攝像機拿來,我們首先
2011-02-23 16:39:31
紅外半球攝像機焦點偏移的問題 可見光與紅外光由于波長不同,成像焦點不在一個平面上,導致在白天可見光條件下圖像清晰,而夜間紅外光條件下
2008-09-25 14:37:37
第一步:拿出支架,準備好工具和零件:漲塞、螺絲、改錐、小錘、電鉆等重要工具;按事先確定的安裝位置,檢查好漲塞和自攻螺絲的大小型號,試一試支架螺絲和攝像機底座的螺口是否合適,預埋的管線接口是否處理
2020-12-11 13:43:20
1977年松下公司推出第一代寬動態(tài)攝像機,它的寬動態(tài)范圍是40倍。到了1999年松下公司推出第二代超級寬動態(tài)攝像機,它的寬動態(tài)范圍達到80倍(48dB)。2005年4月松下的第三代超級寬動態(tài)攝像機問世了,它的寬動態(tài)范圍達到160倍(54dB)。
2019-09-12 09:01:58
目前監(jiān)控攝像機市場的寬動態(tài)攝像機種類繁多,很多產(chǎn)品已經(jīng)從第一代發(fā)展到第三代,應用范圍越來越廣
2008-08-20 10:16:15
CCD彩色攝像機的可調整功能 :(1)同步方式的選擇A、對單臺彩色攝像機而言,主要的同步方式有下列三種:內同步——利用彩色攝像機內部的晶體振蕩電路產(chǎn)生同步信號來完成操作。外同步——利用一個外同步信號
2008-08-18 15:42:30
回收康耐視相機工業(yè)CCD相機,工業(yè)攝像機,工業(yè)數(shù)字攝像機,工業(yè)CCD攝像機,工業(yè)攝像頭,工業(yè)數(shù)字攝像頭,工業(yè)CCD攝像頭,1394接口工業(yè)相機,1394接口工業(yè)攝像機,1394接口工業(yè)CCD攝像機
2021-10-09 10:28:44
` 無線供電你造嗎?ithink公司將發(fā)布首款內置電池網(wǎng)絡攝像機手立視Q系網(wǎng)絡攝像機。手立視Q系是ithink公司聯(lián)合中科院共同打造的國內首款內置電池網(wǎng)絡攝像機,憑借逾越頂級網(wǎng)絡攝像機的高性能,手
2015-01-29 14:08:15
` 如今越來越多的人開始重視家庭安全問題,所以家用網(wǎng)絡攝像機理所當然成為人們關注的焦點,這也是近年來智能攝像頭越來越火的原因。如果你也擔心家中的安全,家用網(wǎng)絡攝像機無疑是一個很好的解決方案。打開
2016-03-24 17:50:28
` 隨著物聯(lián)網(wǎng)概念的興起,智能家居也漸漸成為人們關注的焦點。而近兩年,家庭安防市場的開拓讓智能攝像機走下神壇,飛入了尋常百姓家。像360智能攝像機、小蟻智能攝像機、Vimtag P1智能云攝像機
2016-02-23 14:15:18
有什么方法可以將雙目攝像頭結合OpenCV一起使用嗎?
2022-03-02 09:52:05
隨著監(jiān)控系統(tǒng)的日漸普及,攝像機被廣泛應用在各個領域,為社會治安保駕護航。每個應用領域的不同,造就了不同類型的攝像機。攝像機有道路監(jiān)控攝像機、紅外攝像機、超低照度星光級攝像機、夜視一體化系列、煙感型
2009-02-05 15:46:08
什么是攝像機的光譜響應特性?攝像機的數(shù)字信號(DSP)處理指的是什么?什么是攝像機的曝光量?什么是攝像機的最低照度?什么是攝像機的數(shù)字變焦?
2021-10-09 07:56:24
對單臺監(jiān)控攝像機而言,主要的同步方式有下列三種: 內同步--利用監(jiān)控攝像機內部的晶體振蕩電路產(chǎn)生同步信號來完成操作
2008-10-06 16:44:24
紅外攝像機技術分為被動紅外攝像技術和主動紅外攝像技術。 被動紅外攝像機技術是利用任何物質在絕對零度(-273℃)以上都發(fā)射紅外光的原理,人體和熱機發(fā)出的紅外光較強,其它物體發(fā)出的紅外光相對微弱,利用
2008-08-26 10:21:28
設計。中路通訊公司的變焦MCD、MDD、MED、MBB系列攝像機都安裝了大功率紅外燈(最多可達24顆),且采用了大功率恒流電源供電,內部循環(huán)散熱設計,因而能達到遠距離夜視(最遠可達220米)和紅外燈壽命長
2009-05-26 09:54:52
第一、概念要弄清: 模擬攝像機(Camera)前端采用隔行掃描CMOS/CCD感光器將光信號轉換成模擬電信號,然后輸出到DSP,由DSP進行A/D轉換與色彩調整等處理再做D/A轉換調制成PAL
2020-12-11 14:22:45
網(wǎng)絡攝像機 是一種結合傳統(tǒng)攝像機與網(wǎng)絡技術所產(chǎn)生的新一代攝像機,它可以將影像通過網(wǎng)絡傳至有網(wǎng)絡連接端口的另一端,且遠端的瀏覽者不需用任何專業(yè)軟件,只要標準的網(wǎng)絡瀏覽器(如“Microsoft IE或
2008-12-29 14:11:49
(http://www.ztwl.cn/)網(wǎng)絡攝像機網(wǎng)絡攝像機就是擁有獨立的IP地址和嵌入式的操作系統(tǒng)從而實現(xiàn)網(wǎng)絡監(jiān)控的智能化產(chǎn)品。輕此又被叫做IP 攝像機或IP CAMERA。 它可以通過LAN
2009-05-26 09:57:13
網(wǎng)絡攝像機是什么?有什么應用?
2021-06-07 06:51:07
130萬高清網(wǎng)絡全景攝像機 360度魚眼網(wǎng)絡攝像機畫面出現(xiàn)花屏還有軟件打開時出現(xiàn)卡死狀態(tài)是什么原因導致的?求解
2020-10-22 22:14:09
論民用網(wǎng)絡攝像機的應用及技術實現(xiàn),看完你就懂了
2021-05-31 06:17:14
本應用筆記介紹了安全視頻監(jiān)控系統(tǒng)中高級互聯(lián)網(wǎng)協(xié)議(IP)攝像機與模擬攝像機的應用差異。
2021-06-02 06:36:00
在計算機視覺中,二維計算機坐標和三維物體空間坐標的關系可通過攝像機模型來建立。模型中的參數(shù)包括:攝像機幾何、光學特性參數(shù)(內參數(shù))及攝像機空間位置參數(shù)(外參
2009-08-05 15:29:16 41
41 本文提出了一種雙目立體視覺的幾何解法,通過分別獲取場景中某物體在左右攝像機中投影點的實際像素坐標,利用標定得到的攝像機內參數(shù),求得投影點的理想圖像坐標。然后
2009-12-30 17:01:1914 雙目標定是雙目系統(tǒng)的關鍵技術,本文對雙目系統(tǒng)標定進行理論分析,給出基于變換矩陣的坐標系變換關系。考慮實際情況,提出基于投影法及小波變換的雙目系統(tǒng)標定方法,給出
2010-01-07 14:57:0916 視覺傳感器的標定技術
雙目視覺傳感器由兩臺性能相同的面陣CCD攝像機組成,基于立體視差的原理,可完
2009-11-07 11:42:01 1723
1723 利用機器視覺的攝像機標定方法研究
機器視覺的基本任務之一是從攝像機獲取圖像信息并計算三維空間中物體的幾何信息,以由此重建和識別物體。而空間物體表面某
2010-03-04 10:04:541005 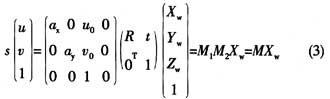
以簡化以往的攝像機標定技術為研究目的,分析了標定算法對于前期圖像處理的要求,給出了基于MATLAB 的簡易 攝像機 標定方法。該方法借助于常用軟件完成了以往攝像機的標定算法中的
2011-06-13 15:52:4039 提出了基于平面單應性矩陣的攝像機標定算法,通過攝像機標定對檢測區(qū)域進行網(wǎng)格劃分,從而進行車輛速度的檢測。經(jīng)實驗測試,該方法易于實現(xiàn),且具有較高的檢測精度,平均測速準確率
2011-11-10 14:35:3651 提出了一種改進標定法.該方法采用分步標定的思想,以創(chuàng)建的平面模板為標定物,利用共面點便可線性求解出攝像機的內外參數(shù).建立的攝像機模型考慮了徑向畸變,有利于提高標定精度
2012-04-26 15:29:2328 介紹了一種線性模型下的攝像機標定方法。在獲取交通視頻的基礎上,利用實際路面上的參照物和圖像處理的基本知識抽象出交通視頻中的像素行和路面實際距離之間的幾何模型,對幾
2012-05-28 16:26:4743 本文介紹了一種線性模型下的攝像機標定方法。在獲取交通視頻的基礎上,利用實際路面上的參照物和圖像處理的基本知識抽象出交通視頻中的像素行和路面實際距離之間的幾何模型,
2012-05-29 16:58:1283 基于B-dual-space的攝像機標定
2015-11-18 16:40:220 本文CameraCalibrator類源代碼來自于OpenCV2 計算機視覺編程手冊(Robert Laganiere 著 張靜 譯) 強烈建議閱讀機器視覺學習筆記(4)——單目攝像機標定參數(shù)
2017-02-08 03:36:38523 攝像機標定是機器視覺和攝像測量領域相對基礎的工作,同時也是最復雜、困難的T作。攝像機標定的意義是得到立體空間中對象的幾何信息,其中所使用的圖像信息由雙目攝像機所得。定后的雙目攝像機得到的圖像目標信息
2017-11-06 14:41:0530 問題,、提出一種基于雙目視覺的投影儀標定算法,將投影儀視為逆向相機,利用一個輔助相機捕獲投影于不同位置標定平面,確立攝像機圖像與標定平面之間的對應關系,然后利用極線原理得到攝像機圖像與投影儀圖像之間的對應關
2017-11-06 15:30:2120 的,這些幾何模型參數(shù)就是攝像機參數(shù)。在大多數(shù)條件下,這些參數(shù)必須通 過實驗與計算才能得到,這個過程被稱為攝像機定標(或稱為標定)。標定過程就是確定攝像機的幾何和光學參數(shù),以及攝像機相對于世界坐標系的方位。
2017-11-17 17:53:3814884 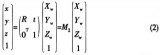
攝像機標定是三維重建時的必要步驟。傳統(tǒng)的標定方法對設備要求高、操作繁瑣,而自標定方法雖然簡便,但精度不高,會嚴重影響三維重建的效果。因此,越來越需要一種操作簡便并且精度高的自標定方法。采用SIFT
2017-11-21 15:01:163 針對無人車(UGV)自主跟隨目標車輛檢測過程中需要對激光雷達(LiDAR)數(shù)據(jù)和攝像機圖像進行信息融合的問題,提出了一種基于梯形棋盤格標定板對激光雷達和攝像機進行聯(lián)合標定的方法。首先,利用激光雷達
2017-11-30 16:23:127 我們首先介紹下計算機視覺領域中常見的三個坐標系:圖像坐標系,相機坐標系,世界坐標系。以及他們之間的關系。然后介紹如何使用張正友相機標定法標定相機。攝像機標定(Camera calibration)簡單來說是從世界坐標系換到圖像坐標系的過程,也就是求最終的投影矩陣的過程。
2017-12-04 16:56:3517861 
可選參數(shù)進行攝像機標定的程序。calibration_artificial.cpp 是程序模擬模擬攝像機標定的過程,即程序創(chuàng)建棋盤然后自主標定。
2017-12-04 17:23:263427 
為提高場景攝像機的標定精度和標定效率,本文利用攝像機透鏡成像原理,基于針孔成像模型,提出了一種基于單幅二維圖像的攝像機標定方法。該方法利用最小二乘法直接計算世界坐標系與計算機圖像坐標系之間的數(shù)學模型
2017-12-15 11:04:185 雙目立體視覺中在對物體進行三維測量或精準定位時,需要對攝像機進行標定以獲得其內外參數(shù)。研究徑向畸變攝像機模型,構造了基于一階徑向畸變( RAC)算法的雙目攝像機內外參數(shù)線性求解公式。考慮側傾角、旋轉
2018-12-27 17:04:5211 建立攝像機的模型,在Tsai方法基礎上,改進算法,對攝像機的內、外部參數(shù)進行了標定。試驗結果表明,該方法明顯好于傳統(tǒng)的Tsai方法,可以準確得到水平方向不確定比例因素s。再結合Tsai方法,可以準確獲得其余的標定參數(shù)。
2019-10-31 16:20:055 這幾天把基于opencv C++ api將魚眼鏡頭的雙目標定以及測距功能實現(xiàn)完畢,效果還可以,至少對齊得非常棒。 這里把其流程及其關鍵函數(shù)在這...
2020-12-08 22:11:06939 雙目攝像頭標定是測距及其三維建模非常重要的步驟,因為標定出來的內外參數(shù)將會用來對原始圖像進行反畸變校正,而反畸變的效果對立體匹...
2020-12-08 22:27:24544 據(jù)來自中國鐵塔的官方消息顯示,中國鐵塔股份有限公司 2021 年雙目熱成像攝像機產(chǎn)品集中招標項目,已具備招標條件,現(xiàn)進行公開招標。 本項目包括三個標包,分別為標包 1(3km 雙光譜攝像機
2020-12-14 14:41:142549 槍球聯(lián)動因其組網(wǎng)復雜、需多設備配套使用、標定難度高等原因,早已被市場詬病;華為作為安防產(chǎn)業(yè)崛起的新星,早已洞悉這一痛點,創(chuàng)新性地推出HoloSens SDC AI雙目球型攝像機,因其同時擁有兩個攝像頭,又被成為“二郎神”。
2021-01-18 10:56:083230 在這里我們所說的雙目標定是狹義的,講解理論的時候僅指兩臺相機之間相互位置的標定,在代碼實踐的時候,我們才說完整的雙目標定。
2021-07-04 11:04:1610836 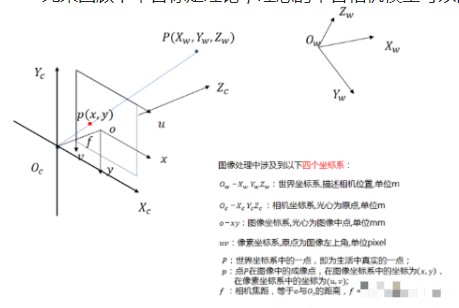
雙目攝像頭標定是測距及其三維建模非常重要的步驟,因為標定出來的內外參數(shù)將會用來對原始圖像進行反畸變校正,而反畸變的效果對立體匹...
2022-01-25 20:04:562 在這里我們所說的雙目標定是狹義的,講解理論的時候僅指兩臺相機之間相互位置的標定,在代碼實踐的時候,我們才說完整的雙目標定。
2022-12-28 17:17:241978 由于OpenCV中cvStereoCalibrate總是會得到很夸張的結果(見下文5.1問題描述),所以最后還是決定用Bouguet的Matlab標定工具箱立體標定,再將標定的結果讀入OpenCV,來進行后續(xù)圖像校準和匹配。
2023-03-21 10:17:28714 一、為什么要進行攝像機標定 隨著機器視覺的迅猛發(fā)展,我們已經(jīng)不滿足于使用攝像機進行監(jiān)控、抓拍這種較為簡單的功能。更多的用戶青睞于它在非接觸三維尺寸測量上的應用。我們所謂的三維測量是廣義的三維測量
2023-06-19 10:57:04975 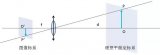
一、為什么要進行攝像機標定 隨著機器視覺的迅猛發(fā)展,我們已經(jīng)不滿足于使用攝像機進行監(jiān)控、抓拍這種較為簡單的功能。更多的用戶青睞于它在非接觸三維尺寸測量上的應用。我們所謂的三維測量是廣義的三維測量
2023-06-20 11:00:03911 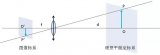
首先,課程介紹了雙目相機標定的基礎知識。我了解到雙目相機是由兩個相機組成的系統(tǒng),通過同時拍攝目標物體的兩個視角來獲取三維信息。
2023-07-03 14:25:061916 
利用本質矩陣和基本矩陣的攝像機標定方法;利用主動系統(tǒng)控制攝像機作特定運動的自標定方法(主動視覺標定方法)。
2023-10-16 11:42:11253 
空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系是由攝像機成像的幾何模型決定的,這些幾何模型參數(shù)就是攝像機參數(shù),為了得到這些參數(shù)而進行的實驗與計算的過程稱為攝像機標定。
2023-10-19 17:31:56544 
空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系是由攝像機成像的幾何模型決定的,這些幾何模型參數(shù)就是攝像機參數(shù),為了得到這些參數(shù)而進行的實驗與計算的過程稱為攝像機標定。
2023-11-03 11:07:58479 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論