 電子發燒友App
電子發燒友App


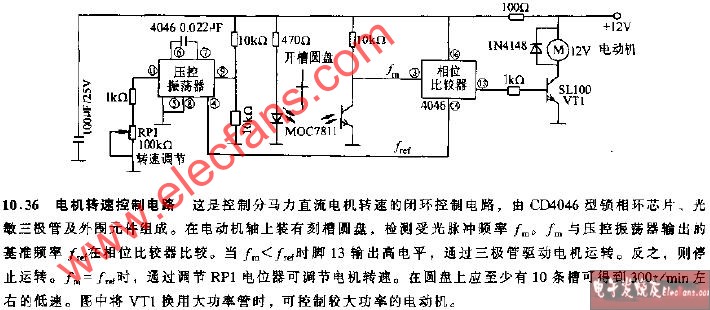
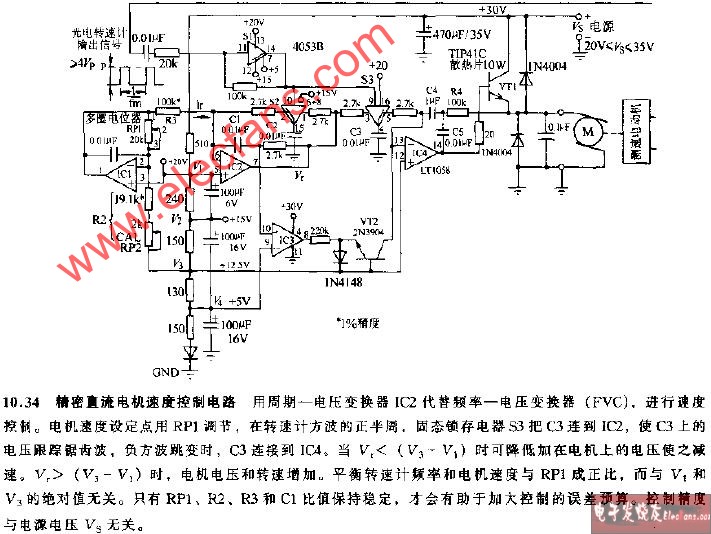
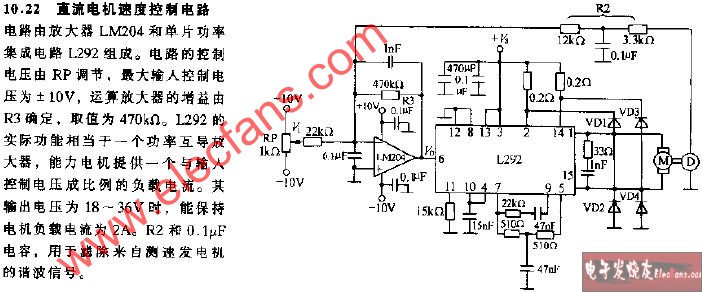
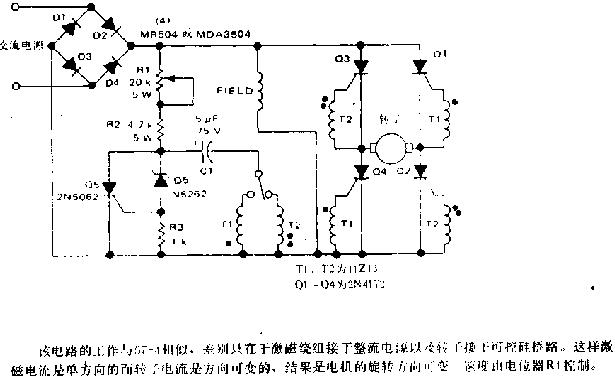
超聲電機是一種基于壓電陶瓷逆壓電效應的新型電機。與一般電磁電機相比,超聲電機能直接輸出低轉速大力矩,且瞬態響應快(可達ms量級)、定位精度高(可達nm量級),非常適合取代傳統的伺服電機及步進電機。目前超聲電機已廣泛應用于照相機及攝像機的自動調焦系統,而且在精密儀器以及航空航天領域也有許多應用。
?????? 盡管超聲電機具有很多優點,但由于超聲電機對于驅動信號有著較高的要求,所以目前國內外開發的超聲電機的驅動及控制電路普遍存在電路體積大、控制性能單一等問題。大多數超聲電機的控制特性研究還是基于與超聲電機配套的普通驅動電路,難以利用計算機方便地進行超聲電機的控制特性研究。
針對上述問題,應用目前市面上流行的DDS芯片AD9850和高壓運放PA08開發出了一種高性能的超聲電機驅動及控制電路。該電路可以通過串行接口用教育處機實施控制和參量采集,并且信號的頻率及相位控制精度高;可以在溫度傳感器的控制下實現信號頻率的自動調節,同時電路中還預留了4路模擬、
1 超聲電機驅動及控制電路的工作原理
?????? 由超聲電機的工作機理[1]可知,大部分超聲電機的運行需要相關的驅控制電路提供兩路頻率相同、相位差為90度(或可調)、頻率為20kHz~100kHz、輸出信號峰-峰值為100~350V、功率為0.1~10W的交變信號。此外,由于超聲電機的最佳工作頻率是由系統的機械共振頻率決定的,而以壓電元件為主的振動系統的共振頻率會隨著外界參數(如溫度、預壓力等)的改變發生變化,因此一款好的超聲電機驅動及控制電路必須能夠很好地對系統共振頻率的變化實施跟蹤,從而確保電機的穩定運行。
 ?
?
2 電路的基本構成和原理
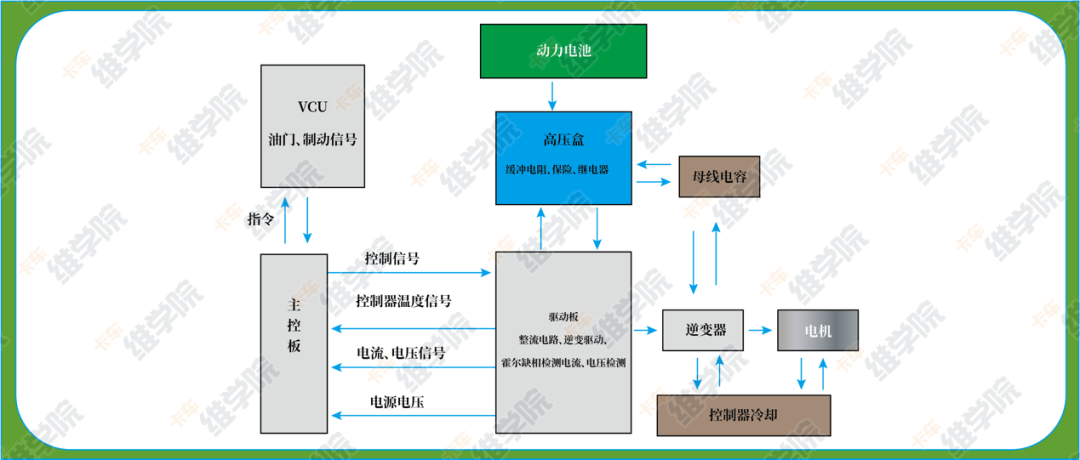
超聲電機驅動及控制電路主要由以下5個部分組成:DDS信號發生單元、信號隔離單元、信號功率放大單元、溫度傳感器單元、單片機主控和接口控制單元(參見圖1)。
?????? DDS信號發生單元產生的兩路獨立的正弦信號,兩路信號間的相位差可以在0~360度范圍內任意調節;兩路信號分別經RC低通濾波和三極管射極跟隨送至高速光耦,然后經由高壓運放放大至250V,用于驅動超聲電機;超聲電機工作一段時間后溫度會發生變化,該溫度由溫度傳感器采集送至主控單片機處理;單片機將溫度數據通過串行口傳到PC機,由PC機根據控制模型將修正后的驅動頻率控制字傳回單片機,或者由單片機根據片內預存的溫度-頻率表修正DDS的信號發生頻率。
?????? 考慮到未來擴展的需要,系統預留出4路A/D及通用I/O復用端口,用來和測量電機轉速的光電編碼器、應變片力矩傳感器等接口。
以下分別就各單元的組成和功能作簡要介紹。
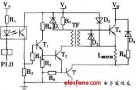
2.1 單片機主控單元
主控單片機采用PIC16F73A型單片機(參見圖2)。該款單片機20MHz的頻率下以5MIPS工作,片內帶有4K FALSH程序存儲器,片上集成有3路定時器、1路USART(可實現RS232通訊)、5路8-bitA/D、路SPI(I2C)以及WDT(看門狗)。該單片機負責兩路DDS的控制(占用RBO~RB7、RC0~RC2、RC5)和串行接口數字式溫度傳感器的控制(采用I2C總線,占用RC3、RC4),并與PC機通過RS232串行口交換數字(占用RC6、RC7),同時該單片機還預留出4只管腳的接口(RA0~RA3),可以工作在通用I/O或者A/D方式,便于未來與其它傳感器或控制器接口。
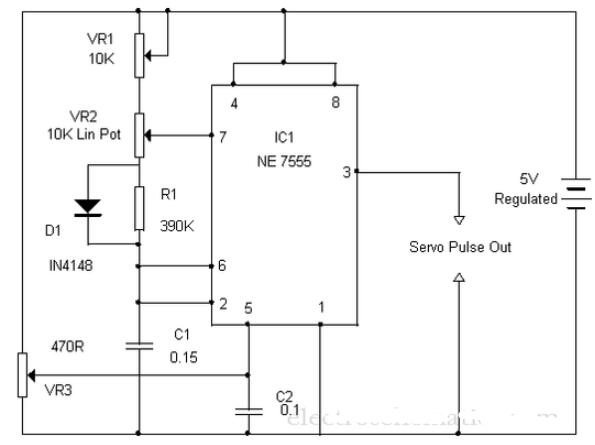
2.2 DDS信號發生單元
DDS信號發生單元使用兩片AD9850直接數字頻率合成器[2](參見圖3,圖3為其中一路,另一路與之完全相同)。該款DDS具有較高的性價比,可以產生最高至62.5MHz的信號,32bit頻率分辨率(即在125MHz時鐘下可以達到0.0291Hz),相位直接控制精度達11.25度,可以采用8位并行或串行方式傳輸總長40bit的控制字。為了實現頻率的快速更新,電路設計中采用了并行的傳輸方式,這樣就能用5個字節完成DDS頻率及相位控制字的更新。而且為了節省總線資源,兩枚DDS芯片共用8-bit數據線、復位線和串行時鐘線,只是采用不同的數據更新控制線FQ-UD。
?????? 盡管11.25度的相位控制精度在應用中已基本滿足需求,但考慮到實驗研究的需要,可能需要更高的相位控制精度(如1度左右)。這一點可以通過以下兩種方法來實
現:
一是通過改變兩路數據更新線FQ-UD間上升沿的延時來實現。考慮到單片機的定時精度約為0.2μs,這一方法在信號頻率為50kHz時可以達到3.6度的相位控制精度。
二是通過短時間內改變兩路信
號的頻率一致性,使得其中一路的頻率比另一路偏高幾赫茲來實現的。這種方法的原理與高頻通訊中通過調頻的方法實現調相的原理基本相同,可以實現優于0.1度的相位控制精度。例如:兩路信號中的一路頻率為50kHz,另一路為50.001kHz。開始時兩路相位相同,200μs(即10個周期)后兩路相位差變為10×360/50000=0.072度。
2.3 信號隔離單元
考慮到信號的放大部分電壓較高(約為260V),而且信號發生部分還需要和計算機接口,為保證電路能完全可靠地工作,在信號發生單元和放大單元間加入了一級信號隔離單元。該單元使用一片HP2531高速光耦作信號傳遞元件。該光耦具有3MHz的帶寬,內帶兩路獨立的光耦,在1kHz~300kHz間作為線性光耦使用具有較好的線性度。在光耦的輸入端還加了一級三極管射極跟隨電路,從而保證光耦輸入端的電流處于較佳的工作點上(參見圖4)。

點擊看原圖
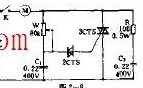
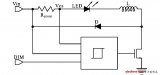
2.4 信號放大單元
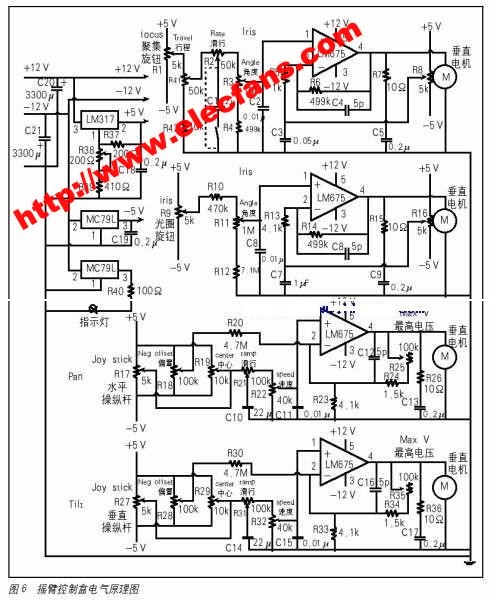
該單元采用兩片PA08系列高壓運放[3]。這種芯片采用8腳TO3封裝,可以在±15V~±150V電源范圍內工作,輸出電流可達±150mA,1MHz處的增益帶寬積為5MHz。該芯片在使用上與普通運放基本沒有差別,只是考慮到超聲電機的負載特性,在電路中加上了耐壓200V以上的超快恢復二極管,對運放的輸出端加以保護,防止電路諧振時產生的反向電壓超出芯片的極限壓差300V。此外,諞芯片通過外接兩枚電阻(圖5中的R7、R8)對輸出電流加以限制,實現對電路的保護作用。電路使用的高壓電源直接由220V交流市電整流產生,通過兩枚130V的穩壓管和串連在回路中的功率電阻向高壓運放提供工作電源。輸出信號的幅度可以方便地通過改變運放的增益系數實現(調節圖5中的電位器R11即可)。
2.5 溫度傳感器單元
?????? 溫度傳感器部分采用兩種方案:
一種是使用MAX6656[4]。該芯片共提供3路溫度傳感器,片內一路,片外兩路,溫度分辨率為0.125。此外,該芯片還提供3路電壓監測以及溫度、電壓的超限報警。數據的傳送采用I2C總線。電路通過在片外接兩枚SOT23封裝的PNP三極管2N3904來實現對超聲電機機殼溫度的兩點采集,采集的結果由單片機處理后送PC機進行監測處理。另一種是采用LM74溫度傳感器[5]。該款溫度傳感器采用SO-8封裝,可直接將溫度傳感器貼在電機機殼上。該溫度傳感器的分辨率為0.0625℃,而且由于是直接將溫度進行A/D量化后通過SPI總線傳輸,因而不受一般外接導線電阻以及電路布線、干擾的影響。使用該芯片唯一的不足是需要從電路板上引出4~5根連線,不如前一種方案中兩根連線(實際選用的是2mm細同軸電纜)方便。
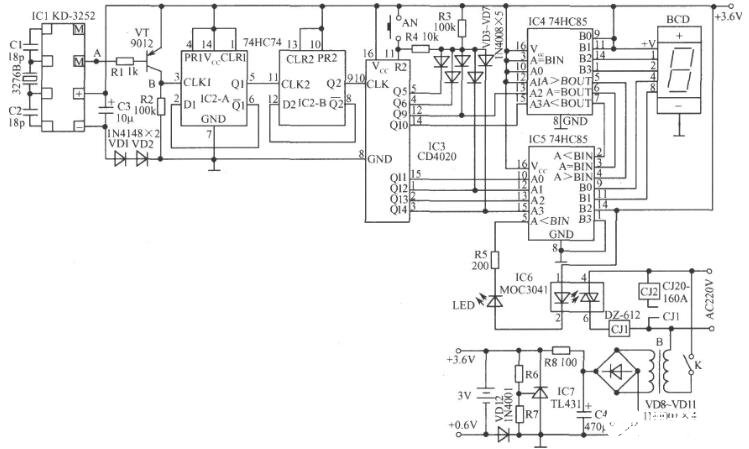
3 日本新生公司的超聲電機驅動及控制電路簡介
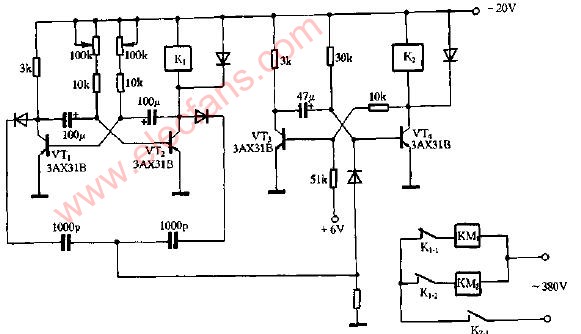
新生公司的超聲電機驅動電路能夠輸出兩路頻率在50kHz附近、相位差90度的正弦信號,通過頻率微調的方式調節超聲電機的轉速,由外置的開關控制電機的啟動和運轉方向。此外還能通過電機上預留的反饋極實現頻率小范圍的自動跟蹤。該電路除功率驅部分和變壓器外,大部分單元已經集成到新生公司定制的集成電路缺點在于信號的相位固定,信號電壓的調節也不方便,此外電機沒有預留出較靈活的控制接口,電機的控制策略也較簡單。由于大部分的超聲電機并未設置專門的反饋極,所以該電路一般只適合于該公司的特定系列的超聲電機。此外,由于該電路使用24V直流電壓供電,因此使用中還需要專門配備一功率不小于10W的整流電源,使用起來不方便。
4 實驗測試
實驗使用20MHz有源晶振作為單片機和DDS共用的時鐘源。本文設計的電路可以在20kHz~300kHz范圍內產生兩路穩定的工弦波,信號峰-峰值最高可達250V,兩路最大輸出功率之和約為5W。在驅動新生公司USR30型超聲電機時,輸出信號頻率隨電機溫度在50.1kHz~49.2kHz間變化(溫度升高驅動頻率降低),Vpp=210V時單路輸出電流Ipp約為230mA。
本超聲電機驅動及控制系統具有如下優點:
系統結構簡單,功放部分無需輸入變壓器及阻抗匹配電路,可靠性高;無需電源變壓器,可直接采用市電供電,使用方便;程序開發難度小,用戶可以在計算機上方便地使用各種熟悉的編程環境(如VC、VB、MATLAB等)完成控制程序的編寫;頻率及相位的控制精度高,信號幅度的調整也比較方便;通過電路自帶的溫度傳感器和附設的接口可以方便地進行反饋參量的采集;通用性好,適合大部分中低功率的超聲電機(5W以下)。











 工商網監
工商網監
評論