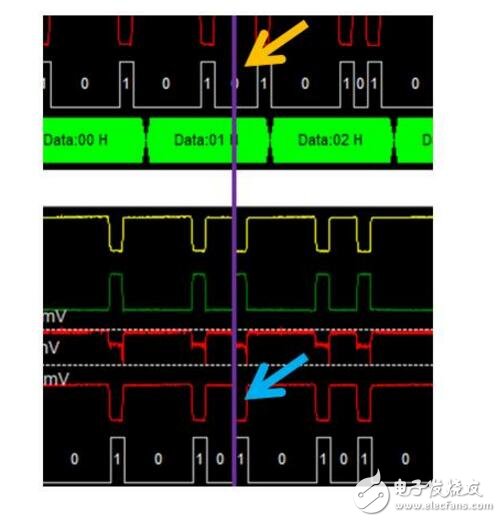
CAN總線在的幀數(shù)據(jù)在總線上傳送時(shí),其它的CAN控制器是通過(guò)驗(yàn)收濾波來(lái)決定總線上的數(shù)據(jù)幀的ID是否和本節(jié)點(diǎn)相吻合,如果與本節(jié)點(diǎn)吻合,那么總線上的數(shù)據(jù)就被存入總線控制器的相應(yīng)寄存器里,否則就拋棄該數(shù)據(jù)
2015-04-28 10:11:26 5290
5290 
了解CAN總線的人都知道,CAN總線在的幀數(shù)據(jù)在總線上傳送時(shí),其它的CAN控制器是通過(guò)驗(yàn)收濾波來(lái)決定總線上的數(shù)據(jù)幀的ID是否和本節(jié)點(diǎn)相吻合
2015-10-26 14:10:081501 
CAN-bus網(wǎng)絡(luò)中原則上不允許兩個(gè)節(jié)點(diǎn)具有相同的ID段,但如果兩個(gè)節(jié)點(diǎn)ID段相同會(huì)怎樣呢?
2017-08-31 15:38:462299 在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181836 
CAN總線是一種常用的總線,對(duì)于剛開(kāi)始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識(shí)符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識(shí)符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識(shí)符。
2023-05-16 09:49:012304 
CAN總線標(biāo)準(zhǔn)只規(guī)定了物理層和數(shù)據(jù)鏈路層,需要用戶自定義應(yīng)用層。不同的CAN標(biāo)準(zhǔn)僅物理層不同。
2023-06-25 15:51:472663 
這意味著變送器通過(guò)CAN收發(fā)器改變總線電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線。接收器通過(guò)監(jiān)測(cè)總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
“0”。CAN總線采用二進(jìn)制不歸零(NRZ)編碼方式,所以總線上不是“0”,就是“1”。但是CAN協(xié)議并沒(méi)有具體定義這兩種狀態(tài)的具體實(shí)現(xiàn)方式,如圖7-7所示。 (10)故障界定(Confinement
2014-04-27 15:16:02
CAN報(bào)文接收時(shí)MASK的值為0時(shí) 不管ID是多少 都接收MASK為1時(shí)看發(fā)送節(jié)點(diǎn)ID與驗(yàn)收碼是否一致同一位上同是0或者同是1則接收,否則不接收對(duì)嗎????
2013-01-02 20:04:53
我正在為我的 CAN 總線使用擴(kuò)展 ID。我想過(guò)濾 ID 0x12。當(dāng)我收到包含 ID 0x12 的擴(kuò)展 ID 幀時(shí),我的代碼運(yùn)行良好。如果收到的 ID 不是 0x12,則不會(huì)觸發(fā) FIFO 回調(diào)
2022-12-13 08:30:26
測(cè)量支持自動(dòng),和A-B通道差分。本次測(cè)試采用單線CAN_H對(duì)地的方式。外部為兩個(gè)CAN總線設(shè)備,將A通道表筆分別和CAN_H和地接好,啟動(dòng)上升沿單次觸發(fā)方式。通訊中實(shí)際周期性的發(fā)送CAN的標(biāo)準(zhǔn)幀ID為
2020-08-19 09:27:19
“0”。CAN總線采用二進(jìn)制不歸零(NRZ)編碼方式,所以總線上不是“0”,就是“1”。但是CAN協(xié)議并沒(méi)有具體定義這兩種狀態(tài)的具體實(shí)現(xiàn)方式,如圖7-7所示。 (10)故障界定(Confinement
2014-04-18 16:36:30
CAN總線在的幀數(shù)據(jù)在總線上傳送時(shí),其它的CAN控制器是通過(guò)驗(yàn)收濾波來(lái)決定總線上的數(shù)據(jù)幀的ID是否和本節(jié)點(diǎn)相吻合,如果與本節(jié)點(diǎn)吻合,那么總線上的數(shù)據(jù)就被存入總線控制器的相應(yīng)寄存器里,否則就拋棄該
2019-08-20 08:12:59
發(fā)送數(shù)據(jù),這被稱作遠(yuǎn)程發(fā)送請(qǐng)求(RTR)。除此以外,CAN協(xié)議還有一個(gè)優(yōu)點(diǎn),當(dāng)總線新加入一個(gè)節(jié)點(diǎn)進(jìn)行通信時(shí)無(wú)需更改原有的程序,新節(jié)點(diǎn)只要通過(guò)ID就可以知道是接收還是丟棄數(shù)據(jù)。 CAN協(xié)議定義了四種
2017-10-19 11:12:46
嗨。1。我想在運(yùn)行時(shí)改變接受的ID ID(過(guò)濾器/面罩)。如果需要重新啟動(dòng)設(shè)備,這是可能的嗎?->CAN PLIB庫(kù)是靜態(tài)的->CAN過(guò)濾器/掩碼是在編譯時(shí)設(shè)置的。在函數(shù)
2019-09-24 11:18:07
現(xiàn)場(chǎng)總線VS工業(yè)以太網(wǎng)現(xiàn)場(chǎng)總線CAN總線(Control Area Network)一、CAN總線是什么?CAN總線的作用?CAN總線的優(yōu)點(diǎn)CAN總線拓?fù)鋱D各接口協(xié)議速率對(duì)比
2021-08-06 07:44:19
CAN總線的仲裁是基于“線與原理(有一個(gè)0則為0,全部為1才為1)”,也即,總線上連接多個(gè)設(shè)備,只要有一個(gè)設(shè)備輸出低電平,那么總線上的電平就為低(這一現(xiàn)象在CAN領(lǐng)域稱為“顯性”);只有全部設(shè)備均
2022-01-19 06:57:59
CAN總線的發(fā)送基本概念報(bào)文的作用報(bào)文的格式CAN.C代碼//CAN發(fā)送一組數(shù)據(jù)(固定格式:ID為0X12,標(biāo)準(zhǔn)幀,數(shù)據(jù)幀)//msg:數(shù)據(jù)指針,最大為8個(gè)字節(jié),len:數(shù)據(jù)長(zhǎng)度(最大為8
2021-08-19 08:17:55
CAN是Controller Area Network的縮寫(xiě),由德國(guó)博世公司開(kāi)發(fā);CAN通過(guò)ISO11891以及ISO11519進(jìn)行了標(biāo)準(zhǔn)化;CAN總線的特點(diǎn):1、多主控制在總線空閑時(shí),所有單元
2021-08-11 08:19:28
總線技術(shù)3.運(yùn)行流程:4.顯性隱性:一、 CAN幀結(jié)構(gòu)CAN-bus通信幀:數(shù)據(jù)幀、遠(yuǎn)程幀、錯(cuò)誤幀、過(guò)載幀和幀間隔1.數(shù)據(jù)幀由7個(gè)段組成,其中根據(jù)仲裁段ID碼長(zhǎng)度的...
2021-08-20 07:03:16
挑戰(zhàn):CAN2.0B 規(guī)范的工業(yè)總線通訊、報(bào)文標(biāo)識(shí)符和數(shù)據(jù)幀定義沒(méi)有形成統(tǒng)一的標(biāo)準(zhǔn),參數(shù)定義 隨意性很大。商用車CAN 總線通訊標(biāo)準(zhǔn),遵循建立在CAN2.0B 基礎(chǔ)上的SAE J1939 協(xié)議
2019-04-08 09:42:13
本帖最后由 于圭 于 2015-1-23 16:33 編輯
我用labview通過(guò)CAN總線發(fā)數(shù)據(jù),單片機(jī)發(fā)過(guò)來(lái)的數(shù)據(jù)有3個(gè)不同的報(bào)文ID,我要怎么正確的把這3個(gè)報(bào)文里面的數(shù)據(jù)讀取出來(lái),求大神指教!!
2014-12-31 14:46:41
1. CAN報(bào)文定義CAN報(bào)文是指發(fā)送單元向接受單元傳送數(shù)據(jù)的幀。我們通常所說(shuō)的CAN報(bào)文是指在CAN線(內(nèi)部CAN、整車CAN、充電CAN)上利用ECU和CAN卡接收到的十六進(jìn)制報(bào)文。2. CAN
2021-09-14 09:23:24
我用labview通過(guò)CAN總線發(fā)數(shù)據(jù),控制器發(fā)過(guò)來(lái)的數(shù)據(jù)有3個(gè)不同的報(bào)文ID,我要怎么正確的把這3個(gè)報(bào)文里面的數(shù)據(jù)讀取出來(lái),求大神指教!!多謝多謝
2021-07-23 11:02:50
CAN現(xiàn)場(chǎng)總線只定義了OSI網(wǎng)絡(luò)模型的第一層(物理層) 和第二層(數(shù)據(jù)鏈路層) ,而這兩層一般已被CAN硬件完全實(shí)現(xiàn)了。由于沒(méi)有規(guī)定應(yīng)用層,本身并不完整,需要一個(gè)高層協(xié)議來(lái)定義CAN報(bào)文中的11
2021-09-09 09:11:37
CAN通信官方例子單個(gè)通道單個(gè)ID過(guò)濾,怎么才能設(shè)置一個(gè)通道全部ID都可以接收?
2023-08-23 07:08:18
是通過(guò)幀id號(hào)進(jìn)行仲裁,仲裁出本次發(fā)送消息的節(jié)點(diǎn)。能夠通過(guò)id來(lái)進(jìn)行總線競(jìng)爭(zhēng)的原因:1 總線遵循與邏輯;0為顯性,1位隱性;2 每個(gè) 節(jié)點(diǎn)在發(fā)送ID號(hào)時(shí),會(huì)監(jiān)聽(tīng)總線電平競(jìng)爭(zhēng)法則:發(fā)送方發(fā)送信息can總線結(jié)果00繼續(xù)01報(bào)錯(cuò)11繼續(xù)10競(jìng)爭(zhēng)失敗,
2022-01-13 06:16:09
上報(bào)CAN總線錯(cuò)誤幀,為0,驅(qū)動(dòng)不會(huì)上報(bào)錯(cuò)誤幀。幀格式CAN幀結(jié)構(gòu)體定義如下,當(dāng)CAN_FRAME中CAN_ID的error為1時(shí),表示該幀為錯(cuò)誤幀。 typedef struct{unsigned int
2017-01-03 15:57:38
為什么我的在頭文件定義的出了問(wèn)題,怎么解決啊……如果把定義can的那些地址移到can.c或main.c,變成說(shuō)我的未定義。你們?cè)囋囄业墓こ蹋幾g下,說(shuō)說(shuō)我的錯(cuò)誤。如果能夠把你們的can的代碼給我看看
2019-05-20 23:40:54
我用STM32F103做的can收發(fā)我發(fā)出的ID是18 FF 88 F1,擴(kuò)展幀,發(fā)的是8個(gè)字節(jié)10 11 121314151617,接收到的信息也是10 11 121314151617,但是
2017-09-29 15:04:03
CYT2B7 can id filter設(shè)置指定id 0x7A1,不能識(shí)別。但設(shè)置為0xA1可以正常識(shí)別。是否對(duì)id有限制?原因是什么?
2024-02-27 07:47:54
有3個(gè)Rx FIFO需要說(shuō)明。
1. Enhanced Rx FIFO需要設(shè)置ID filter elements作為can報(bào)文匹配條件。RX ID 濾芯是否可以動(dòng)態(tài)修改?(RX 可以不停止接收
2023-06-08 07:42:46
相關(guān)設(shè)置 圖四 多過(guò)濾器相關(guān)設(shè)置 圖五 數(shù)據(jù)發(fā)送 圖六 發(fā)送接收顯示顏色自定義設(shè)置 圖七 總線狀態(tài)監(jiān)控 圖八 數(shù)據(jù)發(fā)送接收顯示 圖九 列表模式發(fā)送數(shù)據(jù) 圖十 軟件運(yùn)行相關(guān)狀態(tài)顯示圖十一 CAN適配器實(shí)物圖
2019-02-21 11:37:37
。屏蔽位模式下的屏蔽/標(biāo)識(shí)符寄存器,跟標(biāo)識(shí)符列表模式下的寄存器位定義相同。4 代碼實(shí)例4.1 CAN ID值的結(jié)構(gòu)分析在講到代碼實(shí)例之前,首先大家都弄懂一件事,當(dāng)給定一個(gè)CAN ID,如
2018-03-16 14:14:19
;//判斷接收標(biāo)志/*GPIO設(shè)置*/GPIO_Configuration()//GPIO的設(shè)置CAN發(fā)送接收引腳設(shè)置{ GPIO_InitTypeDef GPIO_InitStructure;//定義
2016-09-03 21:27:50
,IDE 位設(shè)置為 1 表示擴(kuò)展 ID,因?yàn)槲覀兊?ID 是 29 位的,所以 RTR = 0; IDE = 1;再來(lái)看我們參考手冊(cè)中,定義的 : 將上面數(shù)據(jù)中的標(biāo)示符號(hào)位再填入到 figure 的表
2016-08-19 16:28:04
我們設(shè)置為0表示數(shù)據(jù)幀,IDE位設(shè)置為1表示擴(kuò)展ID,因?yàn)槲覀兊?b class="flag-6" style="color: red">ID是29位的,所以RTR = 0; IDE = 1;再來(lái)看我們參考手冊(cè)中,定義的 : 將上面數(shù)據(jù)中的標(biāo)示符號(hào)位再填入到過(guò)濾器中:所以
2016-08-10 14:37:12
的應(yīng)用。2.CAN協(xié)議CAN總線采用分層結(jié)構(gòu),規(guī)范規(guī)定了任意兩個(gè)節(jié)點(diǎn)之間的兼容性。包括電氣特件利數(shù)據(jù)解釋協(xié)議。CAN協(xié)議可分為:目標(biāo)層、傳送層、物理層。其中目標(biāo)層和傳送層包括了ISO/OSI定義的數(shù)據(jù)鏈路的所有
2016-11-06 17:00:51
STM32調(diào)試CAN總線RxMessage.Id異常
2021-08-19 09:38:42
如題 :DSP中是采用兩個(gè)寄存器MSCIDnH和MSCIDnL進(jìn)行設(shè)置的 標(biāo)準(zhǔn)ID11位 擴(kuò)展ID29位。USBCAN等轉(zhuǎn)換器中,ID設(shè)置采用了32為的數(shù)值,例如0x00000000。想問(wèn),比如標(biāo)準(zhǔn)
2015-08-19 20:40:04
單片機(jī): PIC18F45K80關(guān)于幀ID的設(shè)置CAN的幀ID分為標(biāo)志幀和擴(kuò)展幀,配置寄存器如下(這里僅貼上發(fā)送ID的寄存器(TXBnSIDH)配置,接收幀ID寄存器(RXBnSIDH)配置相同
2021-11-25 08:42:57
我們面臨著總線上 CAN 信號(hào)的問(wèn)題。
flex can0中已知有60個(gè)CAN ID,所以我們使用了60個(gè)郵箱ID。
這 60 個(gè)郵箱中斷信號(hào)可以通過(guò) CAN0 回調(diào)正常檢測(cè)到。如果我們嘗試發(fā)送一些
2023-05-09 13:52:33
我想要使用CAN總線濾波器來(lái)篩選自己需要的ID,但是我按照手冊(cè)上設(shè)置的時(shí)候卻不能正常運(yùn)行。下面是我的初始化代碼/*初始化CAN0 */void INIT_CAN0(void
2017-01-14 16:59:38
DSP28335CAN郵箱如何設(shè)置ID可以接收任何ID的報(bào)文??我設(shè)置了 ECanaRegs.CANGAM.all = 0xFFFFFFFF;//全局屏蔽ECanaLAMRegs.LAM1.all
2019-03-07 23:17:49
Can總線加共模電感是如何定義的?
2023-10-16 06:35:54
tms570ls20206的can總線中,為什么設(shè)置了屏蔽寄存器,可是還是所有的CAN的ID都產(chǎn)生中斷,且中斷清不掉.關(guān)于驗(yàn)收濾波器這方面請(qǐng)賜教!謝謝!
2018-08-13 08:30:34
CAN 總線上的節(jié)點(diǎn)是網(wǎng)絡(luò)上的信息接收和發(fā)送站。智能節(jié)點(diǎn)能通過(guò)編程設(shè)置工作方式、ID地址、波特率等參數(shù)。它主要由單片機(jī)和可編程的CAN 通信控制器組成。本文介紹這類節(jié)點(diǎn)的硬
2009-05-13 16:11:39 52
52 摘要:CAN總線上的節(jié)點(diǎn)是網(wǎng)絡(luò)上的信息接收和發(fā)送站;智能節(jié)點(diǎn)能通過(guò)編程設(shè)置工作方式、ID、地址、波特率等參數(shù)。它主要由單片機(jī)和可編程的CAN通信控制器組成。本文介紹這類節(jié)
2010-12-20 22:18:4044 文中分析了CAN總線的發(fā)展和汽車CAN總線技術(shù)的特征,對(duì)CAN總線在汽車領(lǐng)域的應(yīng)用進(jìn)行了深入的探討。
2011-12-14 14:58:1084 本文設(shè)計(jì)的CAN總線中繼器的系統(tǒng)框圖如圖所示。此中繼器以帶有雙CAN接口的STM32F105為核心,外圍電路主要由光電隔離電路、DC/DC電路、CAN收發(fā)器、狀態(tài)顯示電路、波特率設(shè)置電路、ID設(shè)置
2017-09-06 11:27:0624 CAN-bus網(wǎng)絡(luò)中原則上不允許兩個(gè)節(jié)點(diǎn)具有相同的ID段,但如果兩個(gè)節(jié)點(diǎn)ID段相同會(huì)怎樣呢? 實(shí)驗(yàn)前,我們首先要對(duì)CAN報(bào)文的結(jié)構(gòu)組成、仲裁原理有清晰的認(rèn)識(shí)。 一、CAN報(bào)文結(jié)構(gòu) 目前使用最廣
2017-11-12 10:52:428 CAN報(bào)文里是有ID場(chǎng)的,標(biāo)準(zhǔn)幀11位,擴(kuò)展幀29位, 我設(shè)計(jì)時(shí)使用的是擴(kuò)展幀。CAN是以數(shù)據(jù)包方式發(fā)送數(shù)據(jù)的,通常,一包數(shù)據(jù)13字節(jié),第一個(gè)字節(jié)是控制上用的,比如定義了遠(yuǎn)程幀還是別的幀,定義了接收
2017-11-27 10:00:2750723 CAN總線在的幀數(shù)據(jù)在總線上傳送時(shí),其它的CAN控制器是通過(guò)驗(yàn)收濾波來(lái)決定總線上的數(shù)據(jù)幀的ID是否和本節(jié)點(diǎn)相吻合,如果與本節(jié)點(diǎn)吻合,那么總線上的數(shù)據(jù)就被存入總線控制器的相應(yīng)寄存器里,否則就拋棄該數(shù)據(jù)
2017-12-07 10:19:317 明顯的區(qū)別。 當(dāng)CAN總線上的一個(gè)節(jié)點(diǎn)(站)發(fā)送數(shù)據(jù)時(shí),它以報(bào)文形式廣播給網(wǎng)絡(luò)中所有節(jié)點(diǎn)。對(duì)每個(gè)節(jié)點(diǎn)來(lái)說(shuō),無(wú)論數(shù)據(jù)是否是發(fā)給自己的,都對(duì)其進(jìn)行接收。每組報(bào)文開(kāi)頭的11位字符為標(biāo)識(shí)符,定義了報(bào)文的優(yōu)先級(jí),這種報(bào)文格式稱為面向內(nèi)容的編址方案。在
2017-12-07 10:25:5426 CAN總線是什么?CAN總線定義是什么? CAN(Controller Area Network)是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。廣泛應(yīng)用于汽車、船舶等。 CAN控制器通過(guò)組成總線
2017-12-27 13:40:0730720 
1.CAN協(xié)議 1.1 幀類型 通訊時(shí)使用下面5個(gè)類型的幀: 數(shù)據(jù)幀 遙控幀 錯(cuò)誤幀 過(guò)載幀 幀間空隙 在所有這些幀中,數(shù)據(jù)幀和遙控幀由用戶設(shè)置,而其它幀則由CAN硬件設(shè)置。 數(shù)據(jù)和遙控幀有兩種格式
2018-01-04 04:34:217670 
對(duì)比標(biāo)準(zhǔn)的通信七層模型,CAN總線大體可分為物理層、鏈路層、應(yīng)用層。對(duì)鏈路層的解析就能得到節(jié)點(diǎn)ID號(hào)。
2018-03-02 13:00:003677 
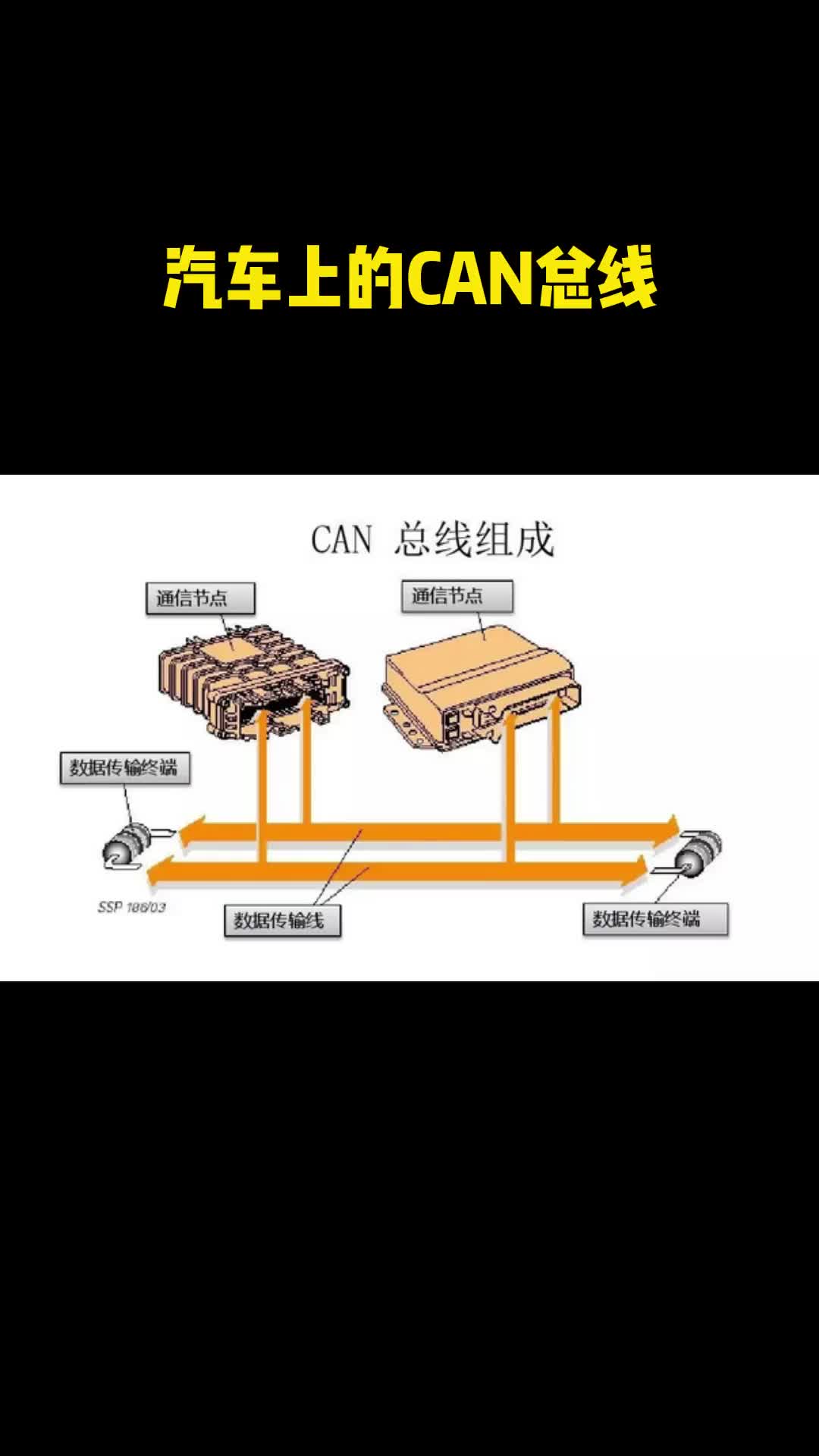
CAN已經(jīng)形成國(guó)際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場(chǎng)總線之一。CAN 總線的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。由于其良好的性能及獨(dú)特的設(shè)計(jì),CAN總線越來(lái)越受到人們的重視,它在汽車領(lǐng)域上的應(yīng)用是最廣泛的。接下來(lái)及跟隨小編一起來(lái)了解一下CAN總線的工作原理、特點(diǎn)及優(yōu)缺點(diǎn)、應(yīng)用領(lǐng)域及應(yīng)用案例吧。
2018-05-07 10:36:3933700 
CAN總線負(fù)載率只是一個(gè)宏觀的參數(shù),已經(jīng)不能充分的評(píng)估總線的有效性和可擴(kuò)展性。一般業(yè)內(nèi)的對(duì)負(fù)載率的定義為實(shí)際數(shù)據(jù)傳輸速率和理論上能達(dá)到的數(shù)據(jù)傳輸速率的比值,本文主要介紹了can總線負(fù)載率如何計(jì)算及CAN總線負(fù)載率必需小于30%問(wèn)題的解答,具體的跟隨小編一起來(lái)了解一下。
2018-05-07 16:34:3141656 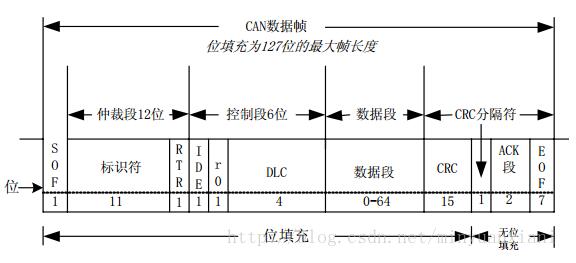
本文說(shuō)的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽(tīng)見(jiàn)CAN總線,也常聽(tīng)見(jiàn)CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來(lái)劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073332 
在理解了CAN總線的自通信程序后,再來(lái)探討CAN總線間的相互通信變得容易了許多。對(duì)于是自通信還是相互通信,這個(gè)肯定是需要對(duì)寄存器進(jìn)行必要的設(shè)置 的,分析PIAE的兩個(gè)程序后不難發(fā)現(xiàn),自通信和互通
2018-09-21 15:06:021466 應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。
2019-04-08 15:51:0631382 總線錯(cuò)誤幀,為0,驅(qū)動(dòng)不會(huì)上報(bào)錯(cuò)誤幀。 幀格式 CAN幀結(jié)構(gòu)體定義如下,當(dāng)CAN_FRAME中CAN_ID的error為1時(shí),表示該幀為錯(cuò)誤幀。 typedefstruct{ unsignedintid
2020-02-05 10:27:241546 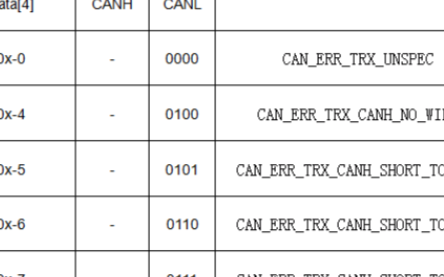
功能,讓每個(gè)節(jié)點(diǎn)對(duì)報(bào)文有選擇性地做出響應(yīng)。 總線使用不歸零位填充。模塊以線與邏輯連接到總線:如果只有一個(gè)節(jié)點(diǎn)向總線傳輸邏輯0,那么不管有多少個(gè)節(jié)點(diǎn)向總線傳輸邏輯1,整個(gè)總線都處于邏輯0狀態(tài)。 CAN標(biāo)準(zhǔn)定義四種不同的報(bào)文類型。報(bào)文使用
2020-04-03 15:32:2213499 CAN總線在的幀數(shù)據(jù)在總線上傳送時(shí),其它的CAN控制器是通過(guò)驗(yàn)收濾波來(lái)決定總線上的數(shù)據(jù)幀的ID是否和本節(jié)點(diǎn)相吻合,如果與本節(jié)點(diǎn)吻合,那么總線上的數(shù)據(jù)就被存入總線控制器的相應(yīng)寄存器里。
2020-07-10 11:30:392152 來(lái)源:羅姆半導(dǎo)體社區(qū) CAN總線和RS485總線的定義 CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱,是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國(guó)BOSCH公司
2023-02-03 16:09:45994 與節(jié)點(diǎn)之間不會(huì)傳輸大數(shù)據(jù)塊,一幀CAN消息最多傳輸8字節(jié)用戶數(shù)據(jù),采用短數(shù)據(jù)包也可以使得系統(tǒng)獲得更好的穩(wěn)定性。CAN總線具有總線仲裁機(jī)制,可以組建多主系統(tǒng)。? 2. CAN標(biāo)準(zhǔn) CAN是一個(gè)由國(guó)際化標(biāo)準(zhǔn)組織定義的串行通訊總線。最初是用于汽車工業(yè),使用兩根信號(hào)總線代替汽車內(nèi)
2020-12-22 16:36:282179 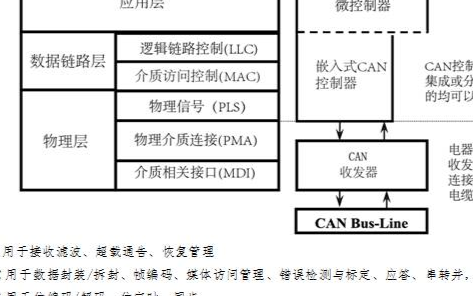
以MSCAN08和MSCAN12為示例,講述CAN現(xiàn)場(chǎng)總線,初步掌握CAN總線技術(shù)的應(yīng)用。
2021-04-20 16:12:35287 CAN總線是什么意思 CAN的全稱是Controller Area Network,中文名稱是控制器局域網(wǎng)絡(luò),是由德國(guó)BOSCH公司開(kāi)發(fā)的,并且最后成為國(guó)際標(biāo)準(zhǔn),這是目前應(yīng)用最多的現(xiàn)場(chǎng)總線之一。現(xiàn)場(chǎng)
2021-08-07 16:37:1317486 上手STM32 CAN協(xié)議配置教程,目的在于 “會(huì)用” CAN總線,對(duì)CAN 協(xié)議原理并未深入講解。CAN協(xié)議基本特點(diǎn)基本特點(diǎn)如下:可多主控制: 當(dāng)CAN總線空閑時(shí),所有在總線上的終端都可以發(fā)送報(bào)文,根據(jù)標(biāo)識(shí)符(CAN ID)決定優(yōu)先級(jí),當(dāng)總線上有兩個(gè)以上的終端發(fā)送消息時(shí),對(duì)各消息CAN ID的每個(gè)位
2021-12-04 17:36:0533 很多的司機(jī)朋友以及工控圈的朋友都有聽(tīng)到過(guò)“CAN總線”一詞,今天我們就來(lái)一起看一下CAN總線為什么這么火? CAN總線,也叫做控制器局域網(wǎng)總線(Controller Area Network
2022-01-15 17:04:485782 can總線光纖轉(zhuǎn)換器是能夠?qū)?b class="flag-6" style="color: red">CAN總線數(shù)據(jù)轉(zhuǎn)換為光信號(hào)進(jìn)行傳輸?shù)脑O(shè)備,是一種非常典型的遠(yuǎn)程CAN中繼工具。和很多的CAN網(wǎng)關(guān)設(shè)備一樣,CAN轉(zhuǎn)光纖中繼器在使用之前也是需要進(jìn)行配置的,但配置的內(nèi)容比較簡(jiǎn)單,就是波特率。下面,我以我們家的CAN總線 光纖轉(zhuǎn)換器為例,讓大家清楚它是怎么實(shí)現(xiàn)波特率的設(shè)置的。
2022-06-28 14:36:371472 can總線光纖轉(zhuǎn)換器是能夠?qū)?b class="flag-6" style="color: red">CAN總線數(shù)據(jù)轉(zhuǎn)換為光信號(hào)進(jìn)行傳輸?shù)脑O(shè)備,是一種非常典型的遠(yuǎn)程CAN中繼工具。
2022-06-28 16:36:005157 CAN總線記錄儀是CANBUS總線配套設(shè)備之一,它可以采集并存儲(chǔ)CANBUS總線上的數(shù)據(jù),并通過(guò)特定的還原軟件還原出來(lái)。有了CAN總線記錄儀,我們就可以不用一直停留在現(xiàn)場(chǎng),而是讓數(shù)據(jù)先保存下來(lái),擇機(jī)再進(jìn)行研究。它長(zhǎng)成什么樣子呢?以我們家的CAN總線記錄儀舉例,它的外形如下
2022-07-26 14:13:32989 高速CAN總線上為顯性電平(邏輯0)時(shí),CAN_H為3.5V、CAN_L為1.5V,此時(shí)電壓差是2V,顯性狀態(tài)的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時(shí),CAN_H和CAN_L都為2.5V,此時(shí)電壓差就是0V,隱性狀態(tài)的CAN總線電壓范圍。
2022-09-13 16:57:223631 CAN總線是硬件實(shí)現(xiàn),編程時(shí)只要設(shè)置相關(guān)的參數(shù)即可.目前在車載通訊和工業(yè)通訊都使用的比較多.
2023-02-07 09:57:492179 CAN總線是一種常用的總線,對(duì)于剛開(kāi)始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識(shí)符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識(shí)符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識(shí)符。
2023-02-09 15:43:152666 不停地去修改參數(shù)。我司研發(fā)的ECAN-401所具備的透明帶標(biāo)識(shí)功能則很好地處理這個(gè)問(wèn)題。該方式把串行幀中的ID信息自動(dòng)轉(zhuǎn)換成CAN總線的幀ID。只要在配置中告訴模塊該
2023-05-31 17:03:04731 
Dialog 中 CAN 總線配置時(shí)的 “New Protocol(總線協(xié)議)”中有四個(gè)選項(xiàng),分別是什么含義?
2023-08-14 15:07:50578 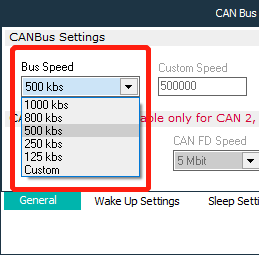
認(rèn)識(shí)CAN 總線錯(cuò)誤的第一步就是了解認(rèn)識(shí)CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463228 
can總線負(fù)載率多少合理? CAN總線是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線的應(yīng)用領(lǐng)域廣泛,例如汽車、航空航天、醫(yī)學(xué)儀器等。在CAN總線中,數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:412173 工程師們?cè)u(píng)估網(wǎng)絡(luò)的性能和可靠性。本文將詳細(xì)介紹CAN總線負(fù)載率的計(jì)算方法。 一、CAN總線負(fù)載率的定義 CAN總線負(fù)載率,指的是在一個(gè)特定時(shí)間內(nèi),總線上發(fā)送和接收數(shù)據(jù)的比率。如果總線的負(fù)載率過(guò)高,就會(huì)導(dǎo)致數(shù)據(jù)沖突、錯(cuò)誤和延遲等問(wèn)題,最終
2023-09-07 15:05:452584 can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053603 CAN總線通訊協(xié)議由德國(guó)博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線通訊協(xié)議的量產(chǎn)車型是1991年的奔馳S級(jí)轎車,至今CAN總線依舊是車內(nèi)主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開(kāi)始
2023-12-21 14:03:45663 
一個(gè)CAN節(jié)點(diǎn)接入總線后,濾波不使能的情況下,總線上所有CAN數(shù)據(jù)幀都能被接收。若僅需接收一個(gè)固定范圍ID的數(shù)據(jù)幀,可以通過(guò)配置屏蔽碼和驗(yàn)收碼,從而對(duì)數(shù)據(jù)幀進(jìn)行過(guò)濾處理。數(shù)據(jù)幀在CAN總線
2023-12-27 08:24:50474 
CAN總線共模電感是應(yīng)用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問(wèn)題。本文將詳細(xì)介紹CAN總線共模電感的定義、作用、選型要點(diǎn)以及常見(jiàn)注意事項(xiàng),并且結(jié)合實(shí)際案例進(jìn)行分析
2024-01-05 13:42:34748 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見(jiàn)的CAN總線類型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497 的隔離地和屏蔽雙絞線的屏蔽層都是用于保護(hù)總線信號(hào)免受外界干擾的措施。 CAN總線的隔離地是指為了防止由于接地問(wèn)題引起的干擾,令總線穩(wěn)定正常工作而設(shè)置的一個(gè)專用地線。這個(gè)隔離地一般與總線的地線相連接,其連接方式可以采用星形結(jié)構(gòu)
2024-02-06 10:15:021398
 電子發(fā)燒友App
電子發(fā)燒友App


















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論