 電子發(fā)燒友App
電子發(fā)燒友App


本文主要是關(guān)于CAN總線的相關(guān)介紹,并著重對(duì)CAN接120歐姆終端電阻的原因進(jìn)行了詳盡的闡述。
CAN總線
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱,是由以研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國(guó)BOSCH公司開發(fā)的,并最終成為國(guó)際標(biāo)準(zhǔn)(ISO 11898),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。
CAN總線是德國(guó)BOSCH公司從80年代初為解決現(xiàn)代汽車中眾多的控制與測(cè)試儀器之間的數(shù)據(jù)交換而開發(fā)的一種串行數(shù)據(jù)通信協(xié)議,它是一種多主總線,通信介質(zhì)可以是雙絞線、同軸電纜或光導(dǎo)纖維。通信速率最高可達(dá)1Mbps。
完成對(duì)通信數(shù)據(jù)的成幀處理
CAN總線通信接口中集成了CAN協(xié)議的物理層和數(shù)據(jù)鏈路層功能,可完成對(duì)通信數(shù)據(jù)的成幀處理,包括位填充、數(shù)據(jù)塊編碼、循環(huán)冗余檢驗(yàn)、優(yōu)先級(jí)判別等項(xiàng)工作。
使網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制
CAN協(xié)議的一個(gè)最大特點(diǎn)是廢除了傳統(tǒng)的站地址編碼,而代之以對(duì)通信數(shù)據(jù)塊進(jìn)行編碼。采用這種方法的優(yōu)點(diǎn)可使網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制,數(shù)據(jù)塊的標(biāo)識(shí)符可由11位或29位二進(jìn)制數(shù)組成,因此可以定義2或2個(gè)以上不同的數(shù)據(jù)塊,這種按數(shù)據(jù)塊編碼的方式,還可使不同的節(jié)點(diǎn)同時(shí)接收到相同的數(shù)據(jù),這一點(diǎn)在分布式控制系統(tǒng)中非常有用。數(shù)據(jù)段長(zhǎng)度最多為8個(gè)字節(jié),可滿足通常工業(yè)領(lǐng)域中控制命令、工作狀態(tài)及測(cè)試數(shù)據(jù)的一般要求。同時(shí),8個(gè)字節(jié)不會(huì)占用總線時(shí)間過長(zhǎng),從而保證了通信的實(shí)時(shí)性。CAN協(xié)議采用CRC檢驗(yàn)并可提供相應(yīng)的錯(cuò)誤處理功能,保證了數(shù)據(jù)通信的可靠性。CAN卓越的特性、極高的可靠性和獨(dú)特的設(shè)計(jì),特別適合工業(yè)過程監(jiān)控設(shè)備的互連,因此,越來越受到工業(yè)界的重視,并已公認(rèn)為最有前途的現(xiàn)場(chǎng)總線之一。
可在各節(jié)點(diǎn)之間實(shí)現(xiàn)自由通信
CAN總線采用了多主競(jìng)爭(zhēng)式總線結(jié)構(gòu),具有多主站運(yùn)行和分散仲裁的串行總線以及廣播通信的特點(diǎn)。CAN總線上任意節(jié)點(diǎn)可在任意時(shí)刻主動(dòng)地向網(wǎng)絡(luò)上其它節(jié)點(diǎn)發(fā)送信息而不分主次,因此可在各節(jié)點(diǎn)之間實(shí)現(xiàn)自由通信。CAN總線協(xié)議已被國(guó)際標(biāo)準(zhǔn)化組織認(rèn)證,技術(shù)比較成熟,控制的芯片已經(jīng)商品化,性價(jià)比高,特別適用于分布式測(cè)控系統(tǒng)之間的數(shù)據(jù)通訊。CAN總線插卡可以任意插在PC AT XT兼容機(jī)上,方便地構(gòu)成分布式監(jiān)控系統(tǒng)。
結(jié)構(gòu)簡(jiǎn)單
只有2根線與外部相連,并且內(nèi)部集成了錯(cuò)誤探測(cè)和管理模塊。
傳輸距離和速率
CAN總線特點(diǎn):(1) 數(shù)據(jù)通信沒有主從之分,任意一個(gè)節(jié)點(diǎn)可以向任何其他(一個(gè)或多個(gè))節(jié)點(diǎn)發(fā)起數(shù)據(jù)通信,靠各個(gè)節(jié)點(diǎn)信息優(yōu)先級(jí)先后順序來決定通信次序,高優(yōu)先級(jí)節(jié)點(diǎn)信息在134μs通信; (2) 多個(gè)節(jié)點(diǎn)同時(shí)發(fā)起通信時(shí),優(yōu)先級(jí)低的避讓優(yōu)先級(jí)高的,不會(huì)對(duì)通信線路造成擁塞; (3) 通信距離最遠(yuǎn)可達(dá)10KM(速率低于5Kbps)速率可達(dá)到1Mbps(通信距離小于40M);(4) CAN總線傳輸介質(zhì)可以是雙絞線,同軸電纜。CAN總線適用于大數(shù)據(jù)量短距離通信或者長(zhǎng)距離小數(shù)據(jù)量,實(shí)時(shí)性要求比較高,多主多從或者各個(gè)節(jié)點(diǎn)平等的現(xiàn)場(chǎng)中使用。
技術(shù)介紹
位仲裁
要對(duì)數(shù)據(jù)進(jìn)行實(shí)時(shí)處理,就必須將數(shù)據(jù)快速傳送,這就要求數(shù)據(jù)的物理傳輸通路有較高的速度。在幾個(gè)站同時(shí)需要發(fā)送數(shù)據(jù)時(shí),要求快速地進(jìn)行總線分配。實(shí)時(shí)處理通過網(wǎng)絡(luò)交換的緊急數(shù)據(jù)有較大的不同。一個(gè)快速變化的物理量,如汽車引擎負(fù)載,將比類似汽車引擎溫度這樣相對(duì)變化較慢的物理量更頻繁地傳送數(shù)據(jù)并要求更短的延時(shí)。
CAN總線以報(bào)文為單位進(jìn)行數(shù)據(jù)傳送,報(bào)文的優(yōu)先級(jí)結(jié)合在11位標(biāo)識(shí)符中,具有最低二進(jìn)制數(shù)的標(biāo)識(shí)符有最高的優(yōu)先級(jí)。這種優(yōu)先級(jí)一旦在系統(tǒng)設(shè)計(jì)時(shí)被確立后就不能再被更改。總線讀取中的沖突可通過位仲裁解決。例如標(biāo)識(shí)符0111111、0100100、0100111發(fā)生位仲裁時(shí),0100100報(bào)文將會(huì)被跟蹤,而其余報(bào)文會(huì)被丟棄。具體過程為:當(dāng)幾個(gè)站同時(shí)發(fā)送報(bào)文時(shí),站1的報(bào)文標(biāo)識(shí)符為0111111,站2的報(bào)文標(biāo)識(shí)符為0100110,站3的報(bào)文標(biāo)識(shí)符為0100111,所有標(biāo)識(shí)符都有相同的兩位01,直到第3位進(jìn)行比較時(shí),站1的報(bào)文被丟棄,因?yàn)樗牡?位為高,而其它兩個(gè)站的報(bào)文第3位為低。站2和站3報(bào)文的4、5、6位相同,直到第7位時(shí),站3的報(bào)文才被丟棄。注意,總線中的信號(hào)持續(xù)跟蹤最后獲得總線讀取權(quán)的站的報(bào)文。在此例中,站2的報(bào)文被跟蹤。這種非破壞性位仲裁方法的優(yōu)點(diǎn)在于,在網(wǎng)絡(luò)最終確定哪一個(gè)站的報(bào)文被傳送以前,報(bào)文的起始部分已經(jīng)在網(wǎng)絡(luò)上傳送了。所有未獲得總線讀取權(quán)的站都成為具有最高優(yōu)先權(quán)報(bào)文的接收站,并且不會(huì)在總線再次空閑前發(fā)送報(bào)文。
CAN具有較高的效率是因?yàn)榭偩€僅僅被那些請(qǐng)求總線懸而未決的站利用,這些請(qǐng)求是根據(jù)報(bào)文在整個(gè)系統(tǒng)中的重要性按順序處理的。這種方法在網(wǎng)絡(luò)負(fù)載較重時(shí)有很多優(yōu)點(diǎn),因?yàn)榭偩€讀取的優(yōu)先級(jí)已被按順序放在每個(gè)報(bào)文中了,這可以保證在實(shí)時(shí)系統(tǒng)中較低的個(gè)體隱伏時(shí)間。
對(duì)于主站的可靠性,由于CAN協(xié)議執(zhí)行非集中化總線控制,所有主要通信,包括總線讀取 (許可)控制,在系統(tǒng)中分幾次完成。這是實(shí)現(xiàn)有較高可靠性的通信系統(tǒng)的唯一方法。
CAN與其它通信方案的比較
在實(shí)踐中,有兩種重要的總線分配方法:按時(shí)間表分配和按需要分配。在第一種方法中,不管每個(gè)節(jié)點(diǎn)是否申請(qǐng)總線,都對(duì)每個(gè)節(jié)點(diǎn)按最大期間分配。由此,總線可被分配給每個(gè)站并且是唯一的站,而不論其是立即進(jìn)行總線存取或在一特定時(shí)間進(jìn)行總線存取。這將保證在總線存取時(shí)有明確的總線分配。在第二種方法中,總線按傳送數(shù)據(jù)的基本要求分配給一個(gè)站,總線系統(tǒng)按站希望的傳送分配(如:EthernetCSMA/CD)。因此,當(dāng)多個(gè)站同時(shí)請(qǐng)求總線存取時(shí),總線將終止所有站的請(qǐng)求,這時(shí)將不會(huì)有任何一個(gè)站獲得總線分配。為了分配總線,多于一個(gè)總線存取是必要的。
CAN實(shí)現(xiàn)總線分配的方法,可保證當(dāng)不同的站申請(qǐng)總線存取時(shí),明確地進(jìn)行總線分配。這種位仲裁的方法可以解決當(dāng)兩個(gè)站同時(shí)發(fā)送數(shù)據(jù)時(shí)產(chǎn)生的碰撞問題。不同于Ethernet網(wǎng)絡(luò)的消息仲裁,CAN的非破壞性解決總線存取沖突的方法,確保在不傳送有用消息時(shí)總線不被占用。甚至當(dāng)總線在重負(fù)載情況下,以消息內(nèi)容為優(yōu)先的總線存取也被證明是一種有效的系統(tǒng)。雖然總線的傳輸能力不足,所有未解決的傳輸請(qǐng)求都按重要性順序來處理。在CSMA/CD這樣的網(wǎng)絡(luò)中,如Ethernet,系統(tǒng)往往由于過載而崩潰,而這種情況在CAN中不會(huì)發(fā)生。
CAN的報(bào)文格式
在總線中傳送的報(bào)文,每幀由7部分組成。CAN協(xié)議支持兩種報(bào)文格式,其唯一的不同是標(biāo)識(shí)符(ID)長(zhǎng)度不同,標(biāo)準(zhǔn)格式為11位,擴(kuò)展格式為29位。
在標(biāo)準(zhǔn)格式中,報(bào)文的起始位稱為幀起始(SOF),然后是由11位標(biāo)識(shí)符和遠(yuǎn)程發(fā)送請(qǐng)求位 (RTR)組成的仲裁場(chǎng)。RTR位標(biāo)明是數(shù)據(jù)幀還是請(qǐng)求幀,在請(qǐng)求幀中沒有數(shù)據(jù)字節(jié)。
控制場(chǎng)包括標(biāo)識(shí)符擴(kuò)展位(IDE),指出是標(biāo)準(zhǔn)格式還是擴(kuò)展格式。它還包括一個(gè)保留位 (ro),為將來擴(kuò)展使用。它的最后四個(gè)位用來指明數(shù)據(jù)場(chǎng)中數(shù)據(jù)的長(zhǎng)度(DLC)。數(shù)據(jù)場(chǎng)范圍為0~8個(gè)字節(jié),其后有一個(gè)檢測(cè)數(shù)據(jù)錯(cuò)誤的循環(huán)冗余檢查(CRC)。
應(yīng)答場(chǎng)(ACK)包括應(yīng)答位和應(yīng)答分隔符。發(fā)送站發(fā)送的這兩位均為隱性電平(邏輯1),這時(shí)正確接收?qǐng)?bào)文的接收站發(fā)送主控電平(邏輯0)覆蓋它。用這種方法,發(fā)送站可以保證網(wǎng)絡(luò)中至少有一個(gè)站能正確接收到報(bào)文。
報(bào)文的尾部由幀結(jié)束標(biāo)出。在相鄰的兩條報(bào)文間有一很短的間隔位,如果這時(shí)沒有站進(jìn)行總線存取,總線將處于空閑狀態(tài)。
CAN數(shù)據(jù)幀的組成
遠(yuǎn)程幀
遠(yuǎn)程幀由6個(gè)場(chǎng)組成:幀起始、仲裁場(chǎng)、控制場(chǎng)、CRC場(chǎng)、應(yīng)答場(chǎng)和幀結(jié)束。遠(yuǎn)程幀不存在數(shù)據(jù)場(chǎng)。
遠(yuǎn)程幀的RTR位必須是隱位。
DLC的數(shù)據(jù)值是獨(dú)立的,它可以是0~8中的任何數(shù)值,為對(duì)應(yīng)數(shù)據(jù)幀的數(shù)據(jù)長(zhǎng)度。
錯(cuò)誤幀
錯(cuò)誤幀由兩個(gè)不同場(chǎng)組成,第一個(gè)場(chǎng)由來自各站的錯(cuò)誤標(biāo)志疊加得到,第二個(gè)場(chǎng)是錯(cuò)誤界定符
錯(cuò)誤標(biāo)志具有兩種形式:
活動(dòng)錯(cuò)誤標(biāo)志(Active error flag),由6個(gè)連續(xù)的顯位組成
認(rèn)可錯(cuò)誤標(biāo)志(Passive error flag),由6個(gè)連續(xù)的隱位組成
錯(cuò)誤界定符包括8個(gè)隱位
超載幀
超載幀包括兩個(gè)位場(chǎng):超載標(biāo)志和超載界定符
發(fā)送超載幀的超載條件:
要求延遲下一個(gè)數(shù)據(jù)幀或遠(yuǎn)程幀
在間歇場(chǎng)檢測(cè)到顯位
超載標(biāo)志由6個(gè)顯位組成
超載界定符由8個(gè)隱位組成
數(shù)據(jù)錯(cuò)誤檢測(cè)
不同于其它總線,CAN協(xié)議不能使用應(yīng)答信息。事實(shí)上,它可以將發(fā)生的任何錯(cuò)誤用信號(hào)發(fā)出。CAN協(xié)議可使用五種檢查錯(cuò)誤的方法,其中前三種為基于報(bào)文內(nèi)容檢查。
3.4.1循環(huán)冗余檢查(CRC)
在一幀報(bào)文中加入冗余檢查位可保證報(bào)文正確。接收站通過CRC可判斷報(bào)文是否有錯(cuò)。
3.4.2 幀檢查
這種方法通過位場(chǎng)檢查幀的格式和大小來確定報(bào)文的正確性,用于檢查格式上的錯(cuò)誤。
3.4.3.應(yīng)答錯(cuò)誤
如前所述,被接收到的幀由接收站通過明確的應(yīng)答來確認(rèn)。如果發(fā)送站未收到應(yīng)答,那么表明接收站發(fā)現(xiàn)幀中有錯(cuò)誤,也就是說,ACK場(chǎng)已損壞或網(wǎng)絡(luò)中的報(bào)文無站接收。CAN協(xié)議也可通過位檢查的方法探測(cè)錯(cuò)誤。
3.4.4 總線檢測(cè)
有時(shí),CAN中的一個(gè)節(jié)點(diǎn)可監(jiān)測(cè)自己發(fā)出的信號(hào)。因此,發(fā)送報(bào)文的站可以觀測(cè)總線電平并探測(cè)發(fā)送位和接收位的差異。
3.4.5 位填充
一幀報(bào)文中的每一位都由不歸零碼表示,可保證位編碼的最大效率。然而,如果在一幀報(bào)文中有太多相同電平的位,就有可能失去同步。為保證同步,同步沿用位填充產(chǎn)生。在五個(gè)連續(xù)相等位后,發(fā)送站自動(dòng)插入一個(gè)與之互補(bǔ)的補(bǔ)碼位;接收時(shí),這個(gè)填充位被自動(dòng)丟掉。例如,五個(gè)連續(xù)的低電平位后,CAN自動(dòng)插入一個(gè)高電平位。CAN通過這種編碼規(guī)則檢查錯(cuò)誤,如果在一幀報(bào)文中有6個(gè)相同位,CAN就知道發(fā)生了錯(cuò)誤。
如果至少有一個(gè)站通過以上方法探測(cè)到 一個(gè)或多個(gè)錯(cuò)誤,它將發(fā)送出錯(cuò)標(biāo)志終止當(dāng)前的發(fā)送。這可以阻止其它站接收錯(cuò)誤的報(bào)文,并保證網(wǎng)絡(luò)上報(bào)文的一致性。當(dāng)大量發(fā)送數(shù)據(jù)被終止后,發(fā)送站會(huì)自動(dòng)地重新發(fā)送數(shù)據(jù)。作為規(guī)則,在探測(cè)到錯(cuò)誤后23個(gè)位周期內(nèi)重新開始發(fā)送。在特殊場(chǎng)合,系統(tǒng)的恢復(fù)時(shí)間為31個(gè)位周期。
但這種方法存在一個(gè)問題,即一個(gè)發(fā)生錯(cuò)誤的站將導(dǎo)致所有數(shù)據(jù)被終止,其中也包括正確的數(shù)據(jù)。因此,如果不采取自監(jiān)測(cè)措施,總線系統(tǒng)應(yīng)采用模塊化設(shè)計(jì)。為此,CAN協(xié)議提供一種將偶然錯(cuò)誤從永久錯(cuò)誤和局部站失敗中區(qū)別出來的辦法。這種方法可以通過對(duì)出錯(cuò)站統(tǒng)計(jì)評(píng)估來確定一個(gè)站本身的錯(cuò)誤并進(jìn)入一種不會(huì)對(duì)其它站產(chǎn)生不良影響的運(yùn)行方法來實(shí)現(xiàn),即站可以通過關(guān)閉自己來阻止正常數(shù)據(jù)因被錯(cuò)誤地當(dāng)成不正確的數(shù)據(jù)而被終止。
硬同步和重同步
硬同步只有在總線空閑狀態(tài)條件下隱形位到顯性位的跳變沿發(fā)生時(shí)才進(jìn)行,表明報(bào)文傳輸開始。在硬同步之后,位時(shí)間計(jì)數(shù)器隨同步段重新開始計(jì)數(shù)。硬同步強(qiáng)行將已發(fā)生的跳變沿置于重新開始的位時(shí)間同步段內(nèi)。根據(jù)同步規(guī)則,如果某一位時(shí)間內(nèi)已有一個(gè)硬同步出現(xiàn),該位時(shí)間內(nèi)將不會(huì)發(fā)生再同步。再同步可能導(dǎo)致相位緩沖段1被延長(zhǎng)或相位緩沖段2被短。這兩個(gè)相位緩沖段的延長(zhǎng)時(shí)間或縮短時(shí)間上限由再同步跳轉(zhuǎn)寬度(SJW)給定。
可靠性
為防止汽車在使用壽命期內(nèi)由于數(shù)據(jù)交換錯(cuò)誤而對(duì)司機(jī)造成危險(xiǎn),汽車的安全系統(tǒng)要求數(shù)據(jù)傳輸具有較高的安全性。如果數(shù)據(jù)傳輸?shù)目煽啃宰銐蚋撸蛘邭埩粝聛淼臄?shù)據(jù)錯(cuò)誤足夠低的話,這一目標(biāo)不難實(shí)現(xiàn)。從總線系統(tǒng)數(shù)據(jù)的角度看,可靠性可以理解為,對(duì)傳輸過程產(chǎn)生的數(shù)據(jù)錯(cuò)誤的識(shí)別能力。
殘余數(shù)據(jù)錯(cuò)誤的概率可以通過對(duì)數(shù)據(jù)傳輸可靠性的統(tǒng)計(jì)測(cè)量獲得。它描述了傳送數(shù)據(jù)被破壞和這種破壞不能被探測(cè)出來的概率。殘余數(shù)據(jù)錯(cuò)誤概率必須非常小,使其在系統(tǒng)整個(gè)壽命周期內(nèi),按平均統(tǒng)計(jì)時(shí)幾乎檢測(cè)不到。計(jì)算殘余錯(cuò)誤概率要求能夠?qū)?shù)據(jù)錯(cuò)誤進(jìn)行分類,并且數(shù)據(jù)傳輸路徑可由一模型描述。如果要確定CAN的殘余錯(cuò)誤概率,我們可將殘留錯(cuò)誤的概率作為具有80~90位的報(bào)文傳送時(shí)位錯(cuò)誤概率的函數(shù),并假定這個(gè)系統(tǒng)中有5~10個(gè)站,并且錯(cuò)誤率為1/1000,那么最大位錯(cuò)誤概率為10—13數(shù)量級(jí)。例如,CAN網(wǎng)絡(luò)的數(shù)據(jù)傳輸率最大為1Mbps,如果數(shù)據(jù)傳輸能力僅使用50%,那么對(duì)于一個(gè)工作壽命4000小時(shí)、平均報(bào)文長(zhǎng)度為 80位的系統(tǒng),所傳送的數(shù)據(jù)總量為9×1010。在系統(tǒng)運(yùn)行壽命期內(nèi),不可檢測(cè)的傳輸錯(cuò)誤的統(tǒng)計(jì)平均小于10—2量級(jí)。換句話說,一個(gè)系統(tǒng)按每年365天,每天工作8小時(shí),每秒錯(cuò)誤率為0. 7計(jì)算,那么按統(tǒng)計(jì)平均,每1000年才會(huì)發(fā)生一個(gè)不可檢測(cè)的錯(cuò)誤。
應(yīng)用舉例
CAN總線在工控領(lǐng)域主要使用低速-容錯(cuò)CAN即ISO11898-3標(biāo)準(zhǔn),在汽車領(lǐng)域常使用500Kbps的高速CAN。
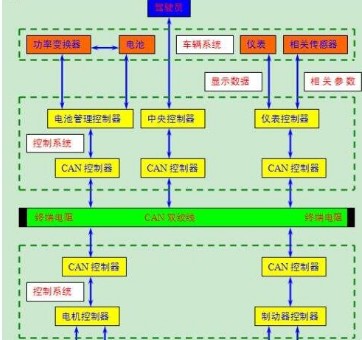
某進(jìn)口車型擁有,車身、舒適、多媒體等多個(gè)控制網(wǎng)絡(luò),其中車身控制使用CAN網(wǎng)絡(luò),舒適使用LIN網(wǎng)絡(luò),多媒體使用MOST網(wǎng)絡(luò),以CAN網(wǎng)為主網(wǎng),控制發(fā)動(dòng)機(jī)、變速箱、ABS等車身安全模塊,并將轉(zhuǎn)速、車速、油溫等共享至全車,實(shí)現(xiàn)汽車智能化控制,如高速時(shí)自動(dòng)鎖閉車門,安全氣囊彈出時(shí),自動(dòng)開啟車門等功能。
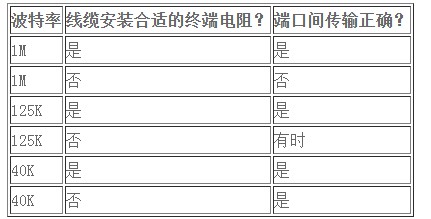
CAN系統(tǒng)又分為高速和低速,高速CAN系統(tǒng)采用硬線是動(dòng)力型,速度:500kbps,控制ECU、ABS等;低速CAN是舒適型,速度:125Kbps,主要控制儀表、防盜等。
某醫(yī)院現(xiàn)有5臺(tái)16T/H XXXX燃?xì)忮仩t,向洗衣房、制劑室、供應(yīng)室、生活用水、暖氣等設(shè)施提供5kg/cm2的蒸汽,全年耗用天然氣1200萬m3,耗用20萬噸自來水。醫(yī)院采用接力式方式供熱,對(duì)熱網(wǎng)進(jìn)行地域性管理,分四大供熱區(qū)。其中冬季暖氣的用氣量很大,據(jù)此設(shè)計(jì)了基于CAN現(xiàn)場(chǎng)總線的分布式鍋爐蒸汽熱網(wǎng)智能監(jiān)控系統(tǒng)。現(xiàn)場(chǎng)應(yīng)用表明:該樓宇自動(dòng)化系統(tǒng)具有抗干擾能力強(qiáng),現(xiàn)場(chǎng)組態(tài)容易,網(wǎng)絡(luò)化程度高,人機(jī)界面友好等特點(diǎn)。
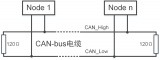
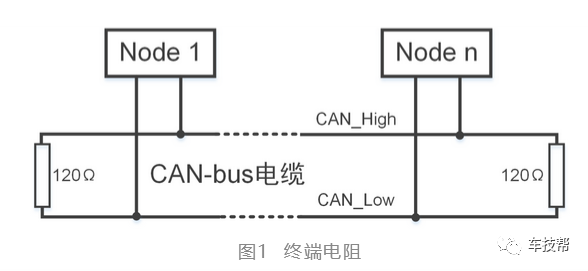
CAN接120歐姆終端電阻的原因分析
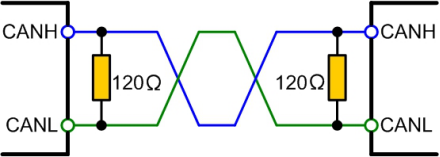
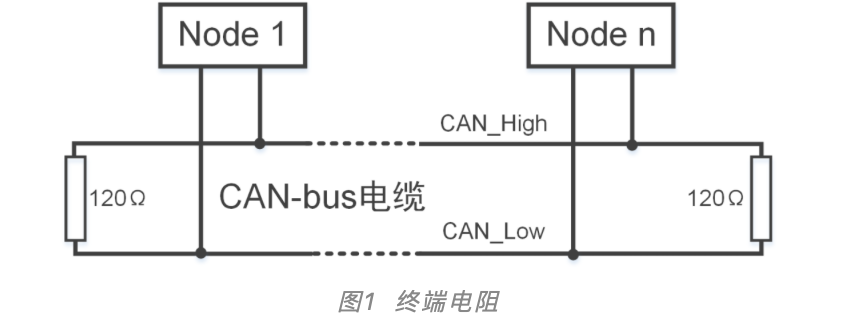
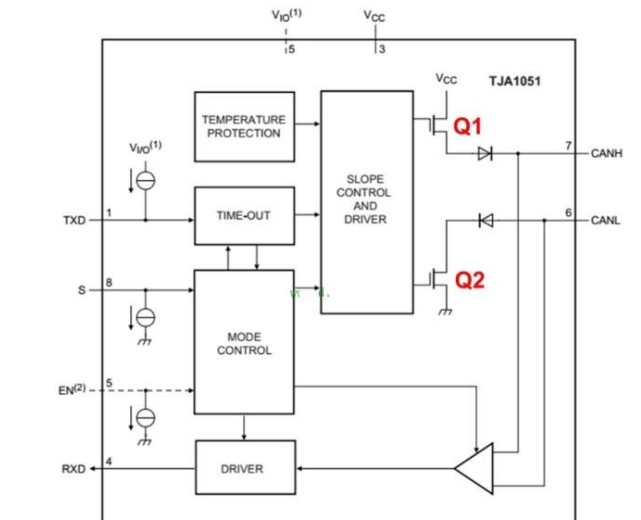
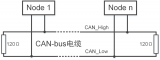
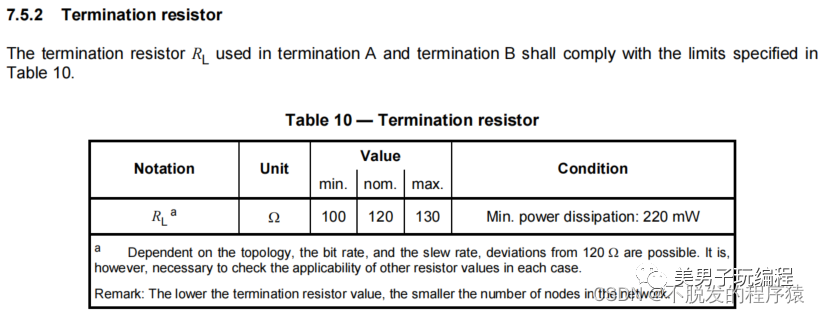
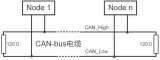
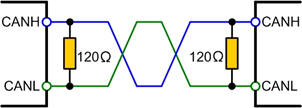
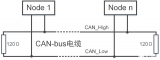
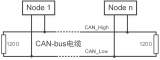
高頻信號(hào)傳輸時(shí),信號(hào)波長(zhǎng)相對(duì)傳輸線較短,信號(hào)在傳輸線終端會(huì)形成反射波,干擾原信號(hào),所以需要在傳輸線末端加終端電阻,使信號(hào)到達(dá)傳輸線末端后不反射。對(duì)于低頻信號(hào)則不用?CAN總線兩端必須連接終端電阻才可以正常工作,終端電阻應(yīng)該與通訊電纜的阻抗相同,典型值為120歐姆。其作用是匹配總線阻抗,提高數(shù)據(jù)通信的抗干擾性及可靠行。??
1.?終端電阻的作用就是吸收信號(hào)反射及回波,而產(chǎn)生信號(hào)反射的最大來源便是阻抗不連續(xù)以及不匹配。?
2.?如果是加在單獨(dú)的兩根線上,相當(dāng)于一個(gè)開環(huán)的狀態(tài),根據(jù)產(chǎn)生信號(hào)反射的來源,也就是說這種連接方式會(huì)導(dǎo)致單線上阻抗更加不連續(xù),在末端突然變?yōu)?,會(huì)導(dǎo)致反射成倍增加。?高速CAN所加的兩個(gè)120歐的電阻實(shí)際上模擬的是線束連接無窮遠(yuǎn)的時(shí)候在傳輸線上產(chǎn)生的特性阻抗(而不是實(shí)際阻抗),這是個(gè)典型經(jīng)驗(yàn)值,具體值取決于所采用的線束類型。?以上如仍有不明之處,請(qǐng)簡(jiǎn)單查閱下傳輸線理論和信號(hào)反射相關(guān)的知識(shí)。?
CAN低速之所以不加終端電阻,是因?yàn)椴煌念l率時(shí),同樣的連接方式所產(chǎn)生的信號(hào)反射和回波差異很大,頻率越高,反射和回波越強(qiáng)烈。另外不同的頻率下,傳輸線的特性阻抗是不同的。??
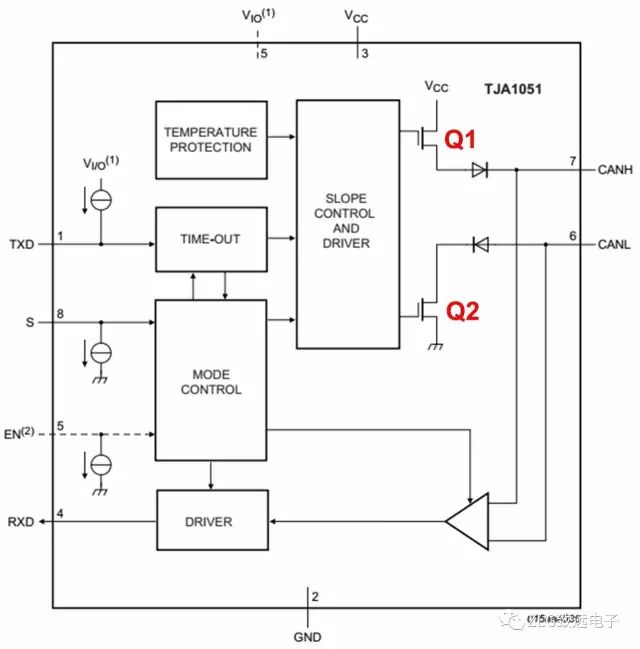
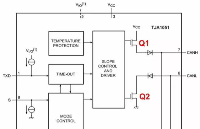
3.?在ISO-11898-2:2003第4頁第一段中大致有這么一句話:“當(dāng)一個(gè)顯性位發(fā)送到至少包含一個(gè)CAN驅(qū)動(dòng)處于開啟狀態(tài)的網(wǎng)絡(luò)上時(shí),意味著有電流經(jīng)過終端電阻,因此,CAN_H和CAN_L具有了不同的電壓值。”,也就是說,在顯性狀態(tài)時(shí),終端電阻會(huì)穩(wěn)定并增強(qiáng)差分電壓,當(dāng)去掉一個(gè)或兩個(gè)終端,通過示波器可以明顯看到一是信號(hào)不穩(wěn),二是差分電壓會(huì)有變化,缺少終端或沒有終端電阻時(shí)所測(cè)到的電壓我認(rèn)為是單純由CAN驅(qū)動(dòng)器所產(chǎn)生的,離發(fā)送端越遠(yuǎn),電壓差異越大。
淺談CAN總線協(xié)議
控制器局域網(wǎng)CAN( Controller Area Network)屬于現(xiàn)場(chǎng)總線的范疇,是一種有效支持分布式控制系統(tǒng)的串行通信網(wǎng)絡(luò)。是由德國(guó)博世公司在20世紀(jì)80年代專門為汽車行業(yè)開發(fā)的一種串行通信總線。由于其高性能、高可靠性以及獨(dú)特的設(shè)計(jì)而越來越受到人們的重視,被廣泛應(yīng)用于諸多領(lǐng)域。而且能夠檢測(cè)出產(chǎn)生的任何錯(cuò)誤。當(dāng)信號(hào)傳輸距離達(dá)到10km時(shí),CAN仍可提供高達(dá)50kbit/s的數(shù)據(jù)傳輸速率。由于CAN總線具有很高的實(shí)時(shí)性能和應(yīng)用范圍,從位速率最高可達(dá)1Mbps的高速網(wǎng)絡(luò)到低成本多線路的50Kbps網(wǎng)絡(luò)都可以任意搭配。因此,CAN己經(jīng)在汽車業(yè)、航空業(yè)、工業(yè)控制、安全防護(hù)等領(lǐng)域中得到了廣泛應(yīng)用。
隨著CAN總線在各個(gè)行業(yè)和領(lǐng)域的廣泛應(yīng)用,對(duì)其的通信格式標(biāo)準(zhǔn)化也提出了更嚴(yán)格的要求。1991年CAN總線技術(shù)規(guī)范(Version2.0)制定并發(fā)布。該技術(shù)規(guī)范共包括A和B兩個(gè)部分。其中2.0A給出了CAN報(bào)文標(biāo)準(zhǔn)格式,而2.0B給出了標(biāo)準(zhǔn)的和擴(kuò)展的兩種格式。美國(guó)的汽車工程學(xué)會(huì)SAE在2000年提出了J1939協(xié)議,此后該協(xié)議成為了貨車和客車中控制器局域網(wǎng)的通用標(biāo)準(zhǔn)。CAN總線技術(shù)也在不斷發(fā)展。傳統(tǒng)的CAN是基于事件觸發(fā)的,信息傳輸時(shí)間的不確定性和優(yōu)先級(jí)反轉(zhuǎn)是它固有的缺陷。當(dāng)總線上傳輸消息密度較小時(shí),這些缺陷對(duì)系統(tǒng)的實(shí)時(shí)性影響較小;但隨著在總線上傳輸消息密度的增加,系統(tǒng)實(shí)時(shí)性能會(huì)急劇下降。為了滿足汽車控制對(duì)實(shí)時(shí)性和傳輸消息密度不斷增長(zhǎng)的需要,改善CAN總線的實(shí)時(shí)性能非常必要。于是,傳統(tǒng)CAN與時(shí)間觸發(fā)機(jī)制相結(jié)合產(chǎn)生了TTCAN(Time-Triggered CAN),ISO11898-4己包含了TTCAN。 TTCAN總線和傳統(tǒng)CAN總線系統(tǒng)的區(qū)別是:總線上不同的消息定義了不同的時(shí)間槽(Timer Slot)。
相關(guān)組織
依據(jù)國(guó)際標(biāo)準(zhǔn)化組織/開放系統(tǒng)互連(International Standardi-zation Organization/Open SystemInterconnection,ISO/OSI)參考模型,CAN的ISO/OSI參考模型的層結(jié)構(gòu)。
概念和特征
CAN總線的工作原理
CAN總線使用串行數(shù)據(jù)傳輸方式,可以1Mb/s的速率在40m的雙絞線上運(yùn)行,也可以使用光纜連接,而且在這種總線上總線協(xié)議支持多主控制器。 [1] CAN與I2C總線的許多細(xì)節(jié)很類似,但也有一些明顯的區(qū)別。當(dāng)CAN總線上的一個(gè)節(jié)點(diǎn)(站)發(fā)送數(shù)據(jù)時(shí),它以報(bào)文形式廣播給網(wǎng)絡(luò)中所有節(jié)點(diǎn)。對(duì)每個(gè)節(jié)點(diǎn)來說,無論數(shù)據(jù)是否是發(fā)給自己的,都對(duì)其進(jìn)行接收。每組報(bào)文開頭的11位字符為標(biāo)識(shí)符,定義了報(bào)文的優(yōu)先級(jí),這種報(bào)文格式稱為面向內(nèi)容的編址方案。在同一系統(tǒng)中標(biāo)識(shí)符是唯一的,不可能有兩個(gè)站發(fā)送具有相同標(biāo)識(shí)符的報(bào)文。當(dāng)幾個(gè)站同時(shí)競(jìng)爭(zhēng)總線讀取時(shí),這種配置十分重要。
當(dāng)一個(gè)站要向其它站發(fā)送數(shù)據(jù)時(shí),該站的CPU將要發(fā)送的數(shù)據(jù)和自己的標(biāo)識(shí)符傳送給本站的CAN芯片,并處于準(zhǔn)備狀態(tài);當(dāng)它收到總線分配時(shí),轉(zhuǎn)為發(fā)送報(bào)文狀態(tài)。CAN芯片將數(shù)據(jù)根據(jù)協(xié)議組織成一定的報(bào)文格式發(fā)出,這時(shí)網(wǎng)上的其它站處于接收狀態(tài)。每個(gè)處于接收狀態(tài)的站對(duì)接收到的報(bào)文進(jìn)行檢測(cè),判斷這些報(bào)文是否是發(fā)給自己的,以確定是否接收它。由于CAN總線是一種面向內(nèi)容的編址方案,因此很容易建立高水準(zhǔn)的控制系統(tǒng)并靈活地進(jìn)行配置。我們可以很容易地在CAN總線中加進(jìn)一些新站而無需在硬件或軟件上進(jìn)行修改。當(dāng)所提供的新站是純數(shù)據(jù)接收設(shè)備時(shí),數(shù)據(jù)傳輸協(xié)議不要求獨(dú)立的部分有物理目的地址。它允許分布過程同步化,即總線上控制器需要測(cè)量數(shù)據(jù)時(shí),可由網(wǎng)上獲得,而無須每個(gè)控制器都有自己獨(dú)立的傳感器。
CAN總線特征
(1)報(bào)文(Message)總線上的數(shù)據(jù)以不同報(bào)文格式發(fā)送,但長(zhǎng)度受到限制。當(dāng)總線空閑時(shí),任何一個(gè)網(wǎng)絡(luò)上的節(jié)點(diǎn)都可以發(fā)送報(bào)文。
(2)信息路由(Information Routing)在CAN中,節(jié)點(diǎn)不使用任何關(guān)于系統(tǒng)配置的報(bào)文,比如站地址,由接收節(jié)點(diǎn)根據(jù)報(bào)文本身特征判斷是否接收這幀信息。因此系統(tǒng)擴(kuò)展時(shí),不用對(duì)應(yīng)用層以及任何節(jié)點(diǎn)的軟件和硬件作改變,可以直接在CAN中增加節(jié)點(diǎn)。
(3)標(biāo)識(shí)符(Identifier) 要傳送的報(bào)文有特征標(biāo)識(shí)符(是數(shù)據(jù)幀和遠(yuǎn)程幀的一個(gè)域),它給出的不是目標(biāo)節(jié)點(diǎn)地址,而是這個(gè)報(bào)文本身的特征。信息以廣播方式在網(wǎng)絡(luò)上發(fā)送,所有節(jié)點(diǎn)都可以接收到。節(jié)點(diǎn)通過標(biāo)識(shí)符判定是否接收這幀信息。
(4)數(shù)據(jù)一致性應(yīng)確保報(bào)文在CAN里同時(shí)被所有節(jié)點(diǎn)接收或同時(shí)不接收,這是配合錯(cuò)誤處理和再同步功能實(shí)現(xiàn)的。
(5)位傳輸速率不同的CAN系統(tǒng)速度不同,但在一個(gè)給定的系統(tǒng)里,位傳輸速率是唯一的,并且是固定的。
(6)優(yōu)先權(quán) 由發(fā)送數(shù)據(jù)的報(bào)文中的標(biāo)識(shí)符決定報(bào)文占用總線的優(yōu)先權(quán)。標(biāo)識(shí)符越小,優(yōu)先權(quán)越高。
(7)遠(yuǎn)程數(shù)據(jù)請(qǐng)求(Remote Data Request) 通過發(fā)送遠(yuǎn)程幀,需要數(shù)據(jù)的節(jié)點(diǎn)請(qǐng)求另一節(jié)點(diǎn)發(fā)送相應(yīng)的數(shù)據(jù)。回應(yīng)節(jié)點(diǎn)傳送的數(shù)據(jù)幀與請(qǐng)求數(shù)據(jù)的遠(yuǎn)程幀由相同的標(biāo)識(shí)符命名。
(8)仲裁(Arbitration) 只要總線空閑,任何節(jié)點(diǎn)都可以向總線發(fā)送報(bào)文。如果有兩個(gè)或兩個(gè)以上的節(jié)點(diǎn)同時(shí)發(fā)送報(bào)文,就會(huì)引起總線訪問碰撞。通過使用標(biāo)識(shí)符的逐位仲裁可以解決這個(gè)碰撞。仲裁的機(jī)制確保了報(bào)文和時(shí)間均不損失。當(dāng)具有相同標(biāo)識(shí)符的數(shù)據(jù)幀和遠(yuǎn)程幀同時(shí)發(fā)送時(shí),數(shù)據(jù)幀優(yōu)先于遠(yuǎn)程幀。在仲裁期間,每一個(gè)發(fā)送器都對(duì)發(fā)送位的電平與被監(jiān)控的總線電平進(jìn)行比較。如果電平相同,則這個(gè)單元可以繼續(xù)發(fā)送,如果發(fā)送的是“隱性”電平而監(jiān)視到的是“顯性”電平,那么這個(gè)單元就失去了仲裁,必須退出發(fā)送狀態(tài)。
(9)總線狀態(tài) 總線有“顯性”和“隱性”兩個(gè)狀態(tài),“顯性”對(duì)應(yīng)邏輯“0”,“隱性”對(duì)應(yīng)邏輯“1”。“顯性”狀態(tài)和“隱性”狀態(tài)與為“顯性”狀態(tài),所以兩個(gè)節(jié)點(diǎn)同時(shí)分別發(fā)送“0”和“1”時(shí),總線上呈現(xiàn)“0”。CAN總線采用二進(jìn)制不歸零(NRZ)編碼方式,所以總線上不是“0”,就是“1”。但是CAN協(xié)議并沒有具體定義這兩種狀態(tài)的具體實(shí)現(xiàn)方式。
(10)故障界定(Confinement) CAN節(jié)點(diǎn)能區(qū)分瞬時(shí)擾動(dòng)引起的故障和永久性故障。故障節(jié)點(diǎn)會(huì)被關(guān)閉。
(11)應(yīng)答接收節(jié)點(diǎn)對(duì)正確接收的報(bào)文給出應(yīng)答,對(duì)不一致報(bào)文進(jìn)行標(biāo)記。
(12)CAN通訊距離最大是10公里(設(shè)速率為5Kbps),或最大通信速率為1Mbps(設(shè)通信距離為40米)。
(13)CAN總線上的節(jié)點(diǎn)數(shù)可達(dá)110個(gè)。通信介質(zhì)可在雙絞線,同軸電纜,光纖中選擇。
(14)報(bào)文是短幀結(jié)構(gòu),短的傳送時(shí)間使其受干擾概率低,CAN有很好的校驗(yàn)機(jī)制,這些都保證了CAN通信的可靠性。
CAN總線的特點(diǎn)
(1)具有實(shí)時(shí)性強(qiáng)、傳輸距離較遠(yuǎn)、抗電磁干擾能力強(qiáng)、成本低等優(yōu)點(diǎn);
(2)采用雙線串行通信方式,檢錯(cuò)能力強(qiáng),可在高噪聲干擾環(huán)境中工作;
(3)具有優(yōu)先權(quán)和仲裁功能,多個(gè)控制模塊通過CAN 控制器掛到CAN-bus 上,形成多主機(jī)局部網(wǎng)絡(luò);
(4)可根據(jù)報(bào)文的ID決定接收或屏蔽該報(bào)文;
(5)可靠的錯(cuò)誤處理和檢錯(cuò)機(jī)制;
(6)發(fā)送的信息遭到破壞后,可自動(dòng)重發(fā);
(7)節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)退出總線的功能;
(8)報(bào)文不包含源地址或目標(biāo)地址,僅用標(biāo)志符來指示功能信息、優(yōu)先級(jí)信息。
協(xié)議內(nèi)容
CAN總線的物理層是將ECU連接至總線的驅(qū)動(dòng)電路。ECU的總數(shù)將受限于總線上的電氣負(fù)荷。物理層定義了物理數(shù)據(jù)在總線上各節(jié)點(diǎn)間的傳輸過程,主要是連接介質(zhì)、線路電氣特性、數(shù)據(jù)的編碼/解碼、位定時(shí)和同步的實(shí)施標(biāo)準(zhǔn)。
總線競(jìng)爭(zhēng)的原則
BOSCH CAN基本上沒有對(duì)物理層進(jìn)行定義,但基于CAN的ISO標(biāo)準(zhǔn)對(duì)物理層進(jìn)行了定義。設(shè)計(jì)一個(gè)CAN系統(tǒng)時(shí),物理層具有很大的選擇余地,但必須保證CAN協(xié)議中媒體訪問層非破壞性位仲裁的要求,即出現(xiàn)總線競(jìng)爭(zhēng)時(shí),具有較高優(yōu)先權(quán)的報(bào)文獲取總線競(jìng)爭(zhēng)的原則,所以要求物理層必須支持CAN總線中隱性位和顯性位的狀態(tài)特征。在沒有發(fā)送顯性位時(shí),總線處于隱性狀態(tài),空閑時(shí),總線處于隱性狀態(tài);當(dāng)有一個(gè)或多個(gè)節(jié)點(diǎn)發(fā)送顯性位,顯性位覆蓋隱性位,使總線處于顯性狀態(tài)。
在此基礎(chǔ)上,物理層主要取決于傳輸速度的要求。從物理結(jié)構(gòu)上看,CAN節(jié)點(diǎn)的構(gòu)成如圖7-8所示。在CAN中,物理層從結(jié)構(gòu)上可分為三層:分別是物理信號(hào)層(Physical Layer Signaling,PLS)、物理介質(zhì)附件(Physical MediaAttachment,PMA)層和介質(zhì)從屬接口(Media Dependent:Inter-face,MDI)層。其中PLS連同數(shù)據(jù)鏈路層功能由CAN控制器完成,PMA層功能由CAN收發(fā)器完成,MDI層定義了電纜和連接器的特性。目前也有支持CAN的微處理器內(nèi)部集成了CAN控制器和收發(fā)器電路,如MC68HC908GZl6。PMA和MDI兩層有很多不同的國(guó)際或國(guó)家或行業(yè)標(biāo)準(zhǔn),也可自行定義,比較流行的是ISOll898定義的高速CAN發(fā)送/接收器標(biāo)準(zhǔn)。
節(jié)點(diǎn)數(shù)量
CAN網(wǎng)絡(luò)上的節(jié)點(diǎn)不分主從,任一節(jié)點(diǎn)均可在任意時(shí)刻主動(dòng)地向網(wǎng)絡(luò)上其他節(jié)點(diǎn)發(fā)送信息,通信方式靈活,利用這一特點(diǎn)可方便地構(gòu)成多機(jī)備份系統(tǒng),CAN只需通過報(bào)文濾波即可實(shí)現(xiàn)點(diǎn)對(duì)點(diǎn)、一點(diǎn)對(duì)多點(diǎn)及全局廣播等幾種方式傳送接收數(shù)據(jù),無需專門的“調(diào)度”。 CAN的直接通信距離最遠(yuǎn)可達(dá)10km(速率5kbps以下);通信速率最高可達(dá)1Mbps(此時(shí)通信距離最長(zhǎng)為40m)。 CAN上的節(jié)點(diǎn)數(shù)主要決定于總線驅(qū)動(dòng)電路,目前可達(dá)110個(gè);報(bào)文標(biāo)識(shí)符可達(dá)2032種(CAN2.0A),而擴(kuò)展標(biāo)準(zhǔn)(CAN2.0B)的報(bào)文標(biāo)識(shí)符幾乎不受限制。
CAN的數(shù)據(jù)鏈路層
CAN的數(shù)據(jù)鏈路層是其核心內(nèi)容,其中邏輯鏈路控制(Logical Link control,LLC)完成過濾、過載通知和管理恢復(fù)等功能,媒體訪問控制(Medium Access control,MAC)子層完成數(shù)據(jù)打包/解包、幀編碼、媒體訪問管理、錯(cuò)誤檢測(cè)、錯(cuò)誤信令、應(yīng)答、串并轉(zhuǎn)換等功能。這些功能都是圍繞信息幀傳送過程展開的。
結(jié)語
關(guān)于CAN總線的相關(guān)介紹就到這了,如有不足之處歡迎指正。
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論