RS 485總線因其結(jié)構(gòu)簡(jiǎn)單、成本低廉、通信速率高、傳輸距離遠(yuǎn)等優(yōu)點(diǎn),在工業(yè)控制領(lǐng)域得到了廣泛應(yīng)用。本文在此基礎(chǔ)上提出了一種基于協(xié)議的提高RS 485 總線實(shí)時(shí)性的設(shè)計(jì)方案。
2013-11-21 11:32:58 2001
2001 
本文以標(biāo)準(zhǔn)的I2C 總線協(xié)議為基礎(chǔ),提出了一種基于FPGA的I2C SLAVE 模式總線的設(shè)計(jì)方案。方案主要介紹了SLAVE 模式的特點(diǎn)。給出了設(shè)計(jì)的原理框圖和modelsim 下的行為仿真時(shí)序
2014-02-26 11:39:1312337 本文介紹了一種CAN總線與以太網(wǎng)互連系統(tǒng)的設(shè)計(jì)方案,設(shè)計(jì)方案在CAN總線物理層和數(shù)據(jù)鏈路層基礎(chǔ)上實(shí)現(xiàn)了擴(kuò)展的應(yīng)用協(xié)議,使CAN總線系統(tǒng)具有良好的擴(kuò)展性,并通過以太網(wǎng)電路接口實(shí)現(xiàn)CAN總線數(shù)據(jù)與以太網(wǎng)
2014-03-19 11:31:014007 的數(shù)量。Dialog Semiconductor 的 DA14586 是首批支持藍(lán)牙 5 的集成器件之一。這種高度集成的 SoC 具有三個(gè)處理器: 用于應(yīng)用代碼的 ARM? Cortex?-M0 內(nèi)核
2018-07-02 09:48:18
哪位大神能幫忙解決一下問題哦。我用keil C 對(duì)C8051F120在線調(diào)試時(shí),為什么檢測(cè)不到輸入脈沖信號(hào),但是實(shí)際在硬件上有脈沖信號(hào)波形輸入。
2015-12-26 14:50:58
8051 C8051F12x Microcontroller IC 8-Bit 100MHz 128KB (128K x 8) FLASH 100-TQFP (14x14)
2023-04-04 21:37:22
這是我根據(jù)C8051F120 的PDF資料寫的FLASH讀和寫的程序,但是就是讀不對(duì),還把原來程序的內(nèi)容給覆蓋掉了: ////////////FLASH讀寫操作調(diào)試程序
2012-01-02 11:04:26
問一下各位朋友,是不是只要是C8051F120單片機(jī),不管后面跟多少字符,功能都是C8051F120。例如我要買C8051F120DCS0SU1050
2011-05-08 00:14:27
C8051F120的AGND、DGND與電源地是什么關(guān)系?AGND與DGND用萬用表測(cè)是通的,需要處理么?AGND、DGND與電源地之間需要處理么?怎么處理?
2014-02-14 09:47:13
5V。通過設(shè)置數(shù)字交叉開關(guān),將C8051F020的外部中斷引腳配置到P2.7口。CAN能夠使用多種物理介質(zhì),例如雙絞線和光纖等。該設(shè)計(jì)方案采用雙絞線。信號(hào)以差分電壓傳送,2條信號(hào)線為CAN_H
2019-06-14 05:00:08
的TN87C196CA和TN87C196CB以及Silicon Laboratories公司的C8051F040等。這里以C8051F040為例詳細(xì)介紹其內(nèi)部CAN控制器的使用方法及其在分布式電源系統(tǒng)中的應(yīng)用。
2011-03-03 14:15:52
C8051F320的I2C總線控制程序-經(jīng)典之作
2012-08-20 13:34:04
C8051F41x器件是完全集成的低功耗混合信號(hào)片上系統(tǒng)型MCU,具有片內(nèi)上電復(fù)位、VDD監(jiān)視器、看門狗定時(shí)器和時(shí)鐘振蕩器的C8051F41x器件是真正能獨(dú)立工作的片上系統(tǒng)。FLASH存儲(chǔ)器還具
2018-03-02 09:37:04
C8051F41x器件是完全集成的低功耗混合信號(hào)片上系統(tǒng)型MCU,具有片內(nèi)上電復(fù)位、VDD監(jiān)視器、看門狗定時(shí)器和時(shí)鐘振蕩器的C8051F41x器件是真正能獨(dú)立工作的片上系統(tǒng)。FLASH存儲(chǔ)器還具
2018-03-12 15:16:42
`Silicon Labs C8051F850 無感應(yīng)器無刷直流 (BLDC) 電動(dòng)機(jī)控制參考設(shè)計(jì)隨時(shí)可使用發(fā)電機(jī)控制解決方案,搭配產(chǎn)品級(jí)質(zhì)量硬件和軟件,在成本敏感性應(yīng)用中快速評(píng)估和部署。該
2015-01-28 23:42:28
C8051F93X開發(fā)工具用戶指南C8051F93X 開發(fā)工具包括下列各項(xiàng):1. C8051F93X 目標(biāo)板2. 串行適配器(USB至目標(biāo)系統(tǒng)協(xié)議轉(zhuǎn)換器)3. Silabs IDE與產(chǎn)品信息
2009-11-23 11:35:57
C8051F9xx低壓MCU方案 摘要:Silicon Lab公司的C8051F9xx低電壓低功耗系列是業(yè)界首個(gè)能工作在0.9 V 到 3.6 V的MCU,直接用單節(jié)電池就能工作
2009-11-28 17:23:38
本帖最后由 putechen 于 2015-3-19 20:22 編輯
silicon Lab的C8051F單片機(jī),有SMBus總線,兼容I2C。手冊(cè)上說可工作在master
2015-03-19 20:17:27
Flash技術(shù),集成JTAG,支持ISP和IAP;同時(shí)提供和某些型號(hào)pintopin的OTP版本。C8051F單片機(jī)熱門型號(hào)均被解密網(wǎng)站:www.icpojie.comC8051F0系列C8051F
2022-03-29 15:25:10
C8051F系列單片機(jī)是完全集成的高速、高性能混合信號(hào)處理系統(tǒng)MCU,具有與8051兼容的微控制器內(nèi)核,與MCS-51指令完全兼容。片內(nèi)資源包括8-12位多通道ADC,1-2路12位DAC和電壓比較
2013-09-27 13:06:25
用c8051f120單片機(jī)做一個(gè)系統(tǒng)。大致這樣:對(duì)某處的溫度、人流量等模擬量進(jìn)行監(jiān)控,然后把結(jié)果發(fā)送到單片機(jī)上用lcd12864顯示出來并可以發(fā)出報(bào)警音,單片機(jī)然后再把數(shù)據(jù)發(fā)送到一臺(tái)上位機(jī),上位機(jī)可以對(duì)單片機(jī)控制反饋信號(hào)。大致就這樣。求高手指導(dǎo)下子。可加qq:769733705,非常感謝。
2012-10-30 10:10:50
c8051f120單片機(jī)怎么點(diǎn)亮第一個(gè)發(fā)光二極管啊?我引腳圖看...
2012-10-31 20:30:07
f120 的flash 是128K keil 的最大編譯空間好像是64k 多出的64k怎么來編譯???可否詳細(xì)的解釋一下,謝謝
2013-04-15 14:59:46
傳一個(gè)c8051的數(shù)據(jù)手冊(cè),寄存器列表
2014-09-04 15:53:40
c8051f410不用內(nèi)部自帶的SMBUS,能不能像51那樣可以模仿I2C總線?
2013-08-08 14:34:11
C8051F120單片機(jī)主要特性高速流水線結(jié)構(gòu)的8051 兼容的CIP-51內(nèi)核可達(dá)100MIPS全速非侵入式的在系統(tǒng)調(diào)試接口片內(nèi)真正12 位C8051F120 100 ksps 的8 通道ADC
2011-07-13 10:45:34
c8051f單片機(jī)資料下載本書匯集了Cygnal集成產(chǎn)品公司迄今為止發(fā)布的有關(guān)C8051F高速SoC單片機(jī)的全部29篇應(yīng)用筆記,內(nèi)容涉及到C8051F單片機(jī)內(nèi)部各種模擬和數(shù)字資源的原理介紹、操作
2008-07-19 10:36:03
` SW2303/SW2305 是一款高集成度的 Type-C 口/Type-A 口快充協(xié)議芯片,支持 PD、QC、FCP、高低壓 SCP、AFC、SFCP、VOOC 以及 PE 等主流快充協(xié)議
2021-04-28 19:40:14
`誠(chéng)芯微推出CX8830:外圍極簡(jiǎn)18W集成多協(xié)議快充芯片提供CX8830 PDF最新版資料,CX8830 樣片申請(qǐng),CX8830demo測(cè)試板及技術(shù)支持TEL:***QQ:1196393673
2019-04-22 15:30:56
DP1363F是一款高度集成的非接觸讀寫芯片支持ISO 15693協(xié)議事項(xiàng)遠(yuǎn)距離讀卡(距離可達(dá)到2米),集強(qiáng)大的多協(xié)議支持、最高射頻輸出功率、以及突破性技術(shù)低功耗卡片檢測(cè)等優(yōu)勢(shì)一身,滿足市場(chǎng)對(duì)更高
2024-02-27 16:11:23
CC2530F256 結(jié)合了德州儀器的業(yè)界領(lǐng)先的黃金單元ZigBee協(xié)議棧(Z-Stack?),提供了一個(gè)強(qiáng)大和完整的ZigBee 解決方案。CC2530 是用于2.4-GHz IEEE
2018-09-04 11:31:06
本資料是關(guān)于:基于PCF8591的I2C總線A/D、D/A轉(zhuǎn)換 的設(shè)計(jì)方案
2012-07-26 22:47:58
1. 概述SW6124是一款高集成度的雙向快充移動(dòng)電源專用多合一芯片,其集成了 5A 高效率開關(guān)充電,24W高效同步升壓輸出,PD/QC/FCP/PE/SFCP 等多種快充協(xié)議,電量計(jì)量,照明驅(qū)動(dòng)
2017-07-28 09:40:02
成本。總線的長(zhǎng)度可高達(dá)25英尺,并且能夠以10Kbps的最大傳輸速率支持40個(gè)組件。I2C總線的另一個(gè)優(yōu)點(diǎn)是,它支持多主控(multimastering), 其中任何能夠進(jìn)行發(fā)送和接收的設(shè)備都可以成為
2012-02-01 09:56:56
一.I2C是什么???I2C總線是PHLIPS公司在20世紀(jì)80年代推出的一種串行總線。具有引腳少,硬件實(shí)現(xiàn)簡(jiǎn)單,可擴(kuò)展性強(qiáng)的優(yōu)點(diǎn)。I2C總線的另一優(yōu)點(diǎn)是支持多主控,總線上任何能夠進(jìn)行發(fā)送/接收數(shù)據(jù)的設(shè)備都可以占領(lǐng)總線。當(dāng)然,任意時(shí)間點(diǎn)上只能存在一個(gè)主控。??I2C即是一種總線,也是一種通訊協(xié)議
2022-02-22 07:37:16
,現(xiàn)在被廣泛地使用在系統(tǒng)內(nèi)多個(gè)集成電路(IC)間的通訊。I2C物理層的特點(diǎn)1.它是一個(gè)支持多設(shè)備的總線。“總線”指多個(gè)設(shè)備共用的信號(hào)線。在一個(gè)I2C通訊總線中,可連接多個(gè)I2C通訊設(shè)備,支持多個(gè)通訊主機(jī)及多個(gè)通訊從機(jī)。2.一個(gè)I2C總線只使用兩條總線線路,一條雙向串行數(shù)據(jù)線(SDA) , 一條串行時(shí)鐘線
2021-08-19 07:00:13
目前,芯谷科技在C8051F349芯片解密以及其他典型C8051系列芯片解密技術(shù)研究中已經(jīng)取得突破性進(jìn)展,可為大部分典型C8051單片機(jī)開發(fā)出成熟可靠的芯片解密方案。 如有C8051F
2012-11-12 10:34:22
尊信電子梁志明***(V信同號(hào))SW3516 是一款高集成度的多快充協(xié)議雙口充電芯片,支持 A+C 口任意口快充輸出,支持雙 口獨(dú)立限流。其集成了 5A 高效率同步降壓變換器,支持 PPS/PD
2021-11-11 13:40:56
深圳市尊信電子技術(shù)有限公司,鈺泰、智融、賽芯等核心代理李先生:***號(hào)可免費(fèi)拿樣品測(cè)試SW6201,支持 PD 的多協(xié)議雙向快充移動(dòng)電源解決方案1. 概述SW6201 是一款高集成度的多協(xié)議雙向快充
2022-03-07 21:31:49
,支持 A+A+B+C 口任意口快充。其集成了 5A 高效率開關(guān)充電,18W 高效同步升壓輸出,PPS/PD/QC/AFC/FCP/PE/SFCP等多種快充協(xié)議,電量計(jì)量,數(shù)碼管/LED 燈顯示以及相應(yīng)
2022-03-02 21:24:30
深圳市尊信電子技術(shù)有限公司,鈺泰、智融、賽芯等核心代理李先生:***號(hào)可免費(fèi)拿樣品測(cè)試SW6206/ SW6208是一款高集成度的多協(xié)議雙向快充移動(dòng)電源專用多合一芯片, 支持 A+A+B+C+L 口
2021-12-03 09:10:49
`產(chǎn)品介紹:支持PD 的多協(xié)議雙向快充移動(dòng)電源解決方案1. 概述SW6206是一款高集成度的多協(xié)議雙向快充移動(dòng)電源專用多合一芯片,支持A+A+B+C+L口任意口快充。其集成5A高效率開關(guān)充電 20W
2019-08-30 19:28:29
移動(dòng)電源專用多合一芯片,支持A+A+B+C+L口任意口快充。其集成了 5A高效率開關(guān)充電,22.5W 高效同步升壓輸出,制管理邏輯。外圍只需少量的器件,即可組成完整的高性能雙向快充移動(dòng)電源解決方案。2.
2021-05-27 19:49:54
C8051F120DK-U開發(fā)工具包含了開發(fā)C8051F120, F121,F122,F123 MCUs應(yīng)用系統(tǒng)的一切所需。開發(fā)工具包含如下部件: &
2009-08-18 13:30:57
; ……技術(shù)支持服務(wù)技術(shù)產(chǎn)品服務(wù)包括:ML-EC3仿真器(C8051F系列單片機(jī)適配器),ML-F020開發(fā)板、ML-F120開發(fā)板、ML-F330開發(fā)板。我們?cè)笧槟峁┓奖憧旖莸姆?wù)。 
2009-02-24 13:11:08
390元/套(配套下載線+光盤) c8051f單片機(jī)仿真器 90元/套(配套下載線+光盤) c8051f120 55元/片 c8051f330st 125元/套 c8051f122 95元/片
2010-02-01 16:27:22
c8051f單片機(jī)編程技術(shù)的人才需求也將日益劇增C8051f單片機(jī)有那些優(yōu)越性?Silicon Laboratories 公司出品的C8051Fxxx系列單片機(jī)是高集成度的混合信號(hào)系統(tǒng)級(jí)芯片(SOC
2009-07-21 14:03:32
的可行性,以C8051F120單片機(jī)系統(tǒng)為實(shí)例,描述了uC/GUI在單片機(jī)系統(tǒng)上的移植應(yīng)用過程,給出了實(shí)驗(yàn)程序。`
2011-03-03 16:25:34
我是用C8051F120做的串口通信測(cè)試,我設(shè)為8位UART的時(shí)候收發(fā)都沒問題,但是設(shè)為9位UART的時(shí)候 單獨(dú)用C8051F發(fā)送 能發(fā)送給PC端,但是把PC端發(fā)送的信息再回送給PC端就有問題,串口調(diào)試助手不顯示任何消息,誰能告訴我原因嗎?
2013-08-14 09:13:42
keil-sofeware公司的Keil-C51是專為8051族單片機(jī)設(shè)計(jì)的高效率C語言編譯器,它生成的程序代碼運(yùn)行速度極高,所需存儲(chǔ)器空間極小。Keil-C51完全支持C8051F32X單片機(jī)的C語言編譯。Keil-C51完全集成在一個(gè)功能強(qiáng)大的集成開發(fā)環(huán)境uVsi全文下載
2010-05-06 09:08:05
針對(duì)某型航行器自沉系統(tǒng)中,需要掌握某合金材料在海水中因不同溫度條件下的受腐蝕時(shí)間長(zhǎng)短。采用模塊化硬件設(shè)計(jì),使用浸水傳感器為檢測(cè)單元、時(shí)鐘芯片DS12887為計(jì)時(shí)模塊;以C8051F040為微處理器
2020-04-21 08:06:34
本文介紹在分級(jí)Ad Hoc網(wǎng)絡(luò)中多協(xié)議路由器的地位及功能,在此基礎(chǔ)上提出一種多協(xié)議路由器設(shè)計(jì)方案。結(jié)合設(shè)計(jì)方案,介紹實(shí)現(xiàn)方案中所采用的Motorola公司的ColdFire嵌入式處理器MCF5272、uClinux操作系統(tǒng),以及在該平臺(tái)上運(yùn)行的路由協(xié)議A0DV。
2021-06-07 06:12:10
/IP協(xié)議棧的優(yōu)勢(shì),從而使得C8051更加便捷,輕松地實(shí)現(xiàn)以太網(wǎng)功能。并且使用了W5100/W5500方案,能夠大大節(jié)省C8051網(wǎng)絡(luò)方面資源開銷,且大幅提升了網(wǎng)絡(luò)吞吐率及系統(tǒng)穩(wěn)定性。極大程度上解決并
2014-12-17 17:22:16
智融SW2305是一款高集成度的 Type-C 口/Type-A 口快充協(xié)議芯片,支持 PD、QC、FCP、高低壓 SCP、 AFC、SFCP、VOOC 以及 PE 等主流快充協(xié)議,支持光耦反饋
2021-10-29 22:18:07
深圳展嶸電子,林寬:***QQ:2235098772我們不但賣芯片,還提供方案技術(shù)支持,解放您的工程師,縮短開發(fā)周期免費(fèi)提供樣板測(cè)試智融SW6106 是一款高集成度的雙向快充移動(dòng)電源專用多合一芯片
2021-08-09 16:36:01
SW6117 是一款高集成度的雙向快充移動(dòng)電源專用多合一芯片,其集成了 4A 高效率開關(guān)充電,18W 高效同步升壓輸出,PD/QC/AFC/FCP/PE/SFCP 等多種快充協(xié)議,電量計(jì)量,照明驅(qū)動(dòng)
2021-08-09 18:20:20
深圳展嶸電子,林寬:***QQ:2235098772我們不但賣芯片,還提供方案技術(shù)支持,解放您的工程師,縮短開發(fā)周期免費(fèi)提供樣板測(cè)試智融SW6121 是一款高集成度的雙向快充移動(dòng)電源專用多合一芯片
2021-08-09 16:51:02
深圳展嶸電子,林寬:***QQ:2235098772我們不但賣芯片,還提供方案技術(shù)支持,解放您的工程師,縮短開發(fā)周期免費(fèi)提供樣板測(cè)試智融SW6201 是一款高集成度的多協(xié)議雙向快充移動(dòng)電源專用多合一
2021-08-09 17:30:02
深圳展嶸電子,林寬:***QQ:2235098772我們不但賣芯片,還提供方案技術(shù)支持,解放您的工程師,縮短開發(fā)周期免費(fèi)提供樣板測(cè)試智融SW6206 是一款高集成度的多協(xié)議雙向快充移動(dòng)電源專用多合一
2021-08-10 09:14:20
深圳展嶸電子,林寬:***QQ:2235098772我們不但賣芯片,還提供方案技術(shù)支持,解放您的工程師,縮短開發(fā)周期免費(fèi)提供樣板測(cè)試智融SW6208 是一款高集成度的多協(xié)議雙向快充移動(dòng)電源專用多合一
2021-08-10 09:25:12
深圳展嶸電子,林寬:***QQ:2235098772我們不但賣芯片,還提供方案技術(shù)支持,解放您的工程師,縮短開發(fā)周期免費(fèi)提供樣板測(cè)試智融SW6228 是一款高集成度的多協(xié)議雙向快充移動(dòng)電源專用多合一
2021-08-09 17:09:57
,為一起帶快充的設(shè)備提供了使用場(chǎng)景。SW6228任意5W/7W/7.5W/10W/15W/20W無線充SW6228 是一款高集成度的多協(xié)議雙向快充移動(dòng)電源專用多合一芯片,支持 A+A+B+C+L 口
2021-04-09 20:40:54
基于c8051f120的0-5v電壓采集并在液晶屏320240上顯示,同時(shí)采用實(shí)時(shí)時(shí)鐘芯片pcf8563t顯示時(shí)間
2013-05-27 18:42:48
求c8051f120的資料,非常感謝
2011-04-21 21:02:11
PCI總線特點(diǎn)及開發(fā)現(xiàn)狀PCI接口配置空間的實(shí)現(xiàn)求一款在PCI總線上利用FPGA技術(shù)設(shè)計(jì)PCI總線接口的設(shè)計(jì)方案
2021-04-15 06:17:20
采用軟件注入技術(shù)的優(yōu)勢(shì)和可行性,針對(duì)采用C8051F023的嵌入式系統(tǒng),討論了基于C8051F023的軟件注入實(shí)現(xiàn)方案和相關(guān)的一些問題,并編寫了V2程序以完善C8051F023集成開發(fā)環(huán)境在實(shí)現(xiàn)軟件注入方面的功能。
2021-04-22 06:11:54
模擬信號(hào)的輸出,并編寫程序在IDA0的引腳上輸出波形信號(hào)。實(shí)驗(yàn)內(nèi)容:1、C8051F36X系統(tǒng)概述C8051F36x器件是完全集成的混合信號(hào)片上系統(tǒng)型MCU。具有片內(nèi)上電復(fù)位電路、VDD監(jiān)視器、看門狗定時(shí)器和時(shí)鐘振蕩器的C8051F36x器件是真正能獨(dú)立工作的片上系統(tǒng)。FLASH 存.
2022-01-24 08:07:01
求一種基于FPGA的HDLC協(xié)議控制器設(shè)計(jì)方案
2021-04-30 06:53:06
求一種基于STM32F103C8T6的無線飛鼠設(shè)計(jì)方案
2021-12-20 06:15:59
求一種嵌入式IPv6協(xié)議棧的設(shè)計(jì)方案
2021-05-27 07:00:37
你好,誰有閑置的C8051F120開發(fā)板,如果有意轉(zhuǎn)讓請(qǐng)聯(lián)系***,謝謝
2011-04-04 15:31:36
用keil進(jìn)行51單片機(jī)編程如何添加C8051F120芯片
2019-07-03 20:32:52
我做了一塊電路板,將模擬電壓輸出和溫度控制兩塊板子集成在一起,上面主要有些電源芯片、溫控芯片ADN8830、C8051f120、AD9240.可板子工作一段時(shí)間后挺燙手,集成前兩塊單板工作都還正常。請(qǐng)問各位高手該從哪個(gè)方面下手解決電路板發(fā)熱的問題呢?謝謝啦
2009-05-21 15:42:17
請(qǐng)問下c8051f120可以用keil編譯嗎
2011-04-21 21:06:05
C8051F120/C8051F121/C8051F123/C8051F124/C8051F125/C8051F126/C8051F127和C8051F13x 系列器件是完全集成的混合信號(hào)片上系統(tǒng)型MCU 芯片,具有64 個(gè)數(shù)字I/O 引腳(100 腳TQFP 封裝)或32 個(gè)數(shù)字I/O 引腳(64
2008-07-20 21:15:03 422
422 C8051F120/1/2/3/4/5/6/7C8051F130/1/2/3 系列混合信號(hào)ISP FLASH 微控制器數(shù) 據(jù) 手 冊(cè)
C8051F13x 系列器件是完全集成的混合信號(hào)片上系統(tǒng)型MCU 芯片,具有64 個(gè)數(shù)字I/O 引腳(100
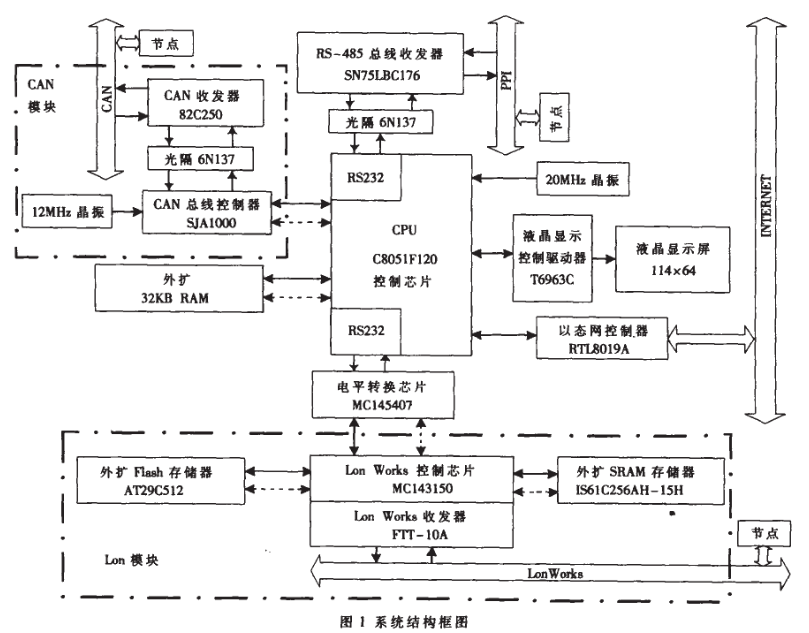
2008-07-20 21:18:0022 本文以 C8051F120 單片機(jī)為背景,在CAN V2.0 技術(shù)規(guī)范的基礎(chǔ)上提出了一種基于單片機(jī)的CAN 應(yīng)用層協(xié)議。文中首先設(shè)計(jì)了一種數(shù)據(jù)傳遞格式,它解決了CAN V2.0 規(guī)范只能傳遞小于8 字
2009-06-17 07:49:1648 CAN總線具有配置靈活、應(yīng)用范圍廣的特點(diǎn),C8051f040單片機(jī)功能強(qiáng)大,集成了CAN總線控制器。本文提出了一種基于C8051f040的CAN總線系統(tǒng)智能節(jié)點(diǎn)的設(shè)計(jì)方案,給出了相應(yīng)的硬件和軟件
2009-06-17 11:18:4723 根據(jù)近紅外光譜儀(NIRS)的特點(diǎn),利用C8051F120 單片機(jī)提出一種數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)方案,實(shí)現(xiàn)了對(duì)數(shù)據(jù)的精確采集。本文扼要介紹了C8051F 系列單片機(jī)的接口結(jié)構(gòu)及工作原理,重點(diǎn)闡述
2009-09-24 16:34:4055 供應(yīng)XPD977D45 支持vooc多協(xié)議車充芯片-2A+C共享電源方案 ,更多產(chǎn)品手冊(cè)、應(yīng)用料資請(qǐng)向富滿微代理驪微電子申請(qǐng)。>>
2023-04-25 16:08:11
對(duì)CDMA手機(jī)頻率合成器的各關(guān)鍵部分進(jìn)行分析,提出了設(shè)計(jì)方案。 關(guān)鍵詞:CDMA手機(jī),射頻前端,頻率合成器,相位噪聲
2009-05-10 13:11:401253 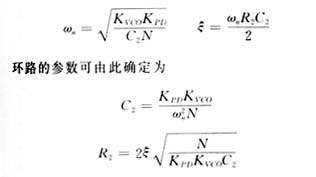
C8051F120與RS422息線的時(shí)鐘同步技術(shù)
引 言 由于指令的速度不斷加快,單片機(jī)在各個(gè)方面的性能大為提高,比如多個(gè)單片機(jī)之間的時(shí)鐘同步。Silicon Labs公
2009-12-15 17:02:191916 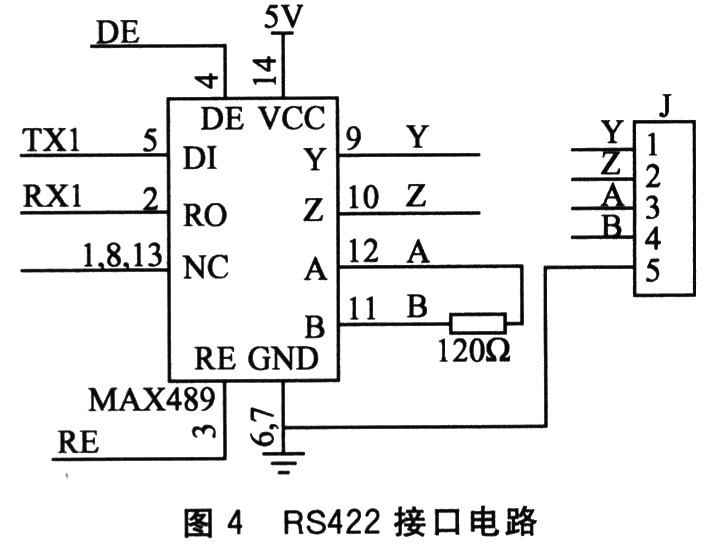
為了滿足自適應(yīng)光學(xué)系統(tǒng)中多路 壓電陶瓷 高壓驅(qū)動(dòng)器輸出電壓實(shí)時(shí)監(jiān)測(cè)、顯示的需要,提出了基于高速單片機(jī)C8051F120的電壓測(cè)量、顯示和通訊系統(tǒng)設(shè)計(jì)方案。利用20路電壓測(cè)量模塊實(shí)現(xiàn)
2011-06-22 10:46:1439 嵌入式設(shè)備憑借其與使用者之間的親和力、自然的人機(jī)交互界面,得到了迅速的發(fā)展,滲透到生活中的各個(gè)角落。本文介紹的設(shè)計(jì)方法是以高性能的8位單片機(jī)C8051F120作為核心處理器,
2012-06-04 11:18:511286 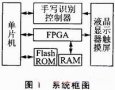
摘 要 針對(duì)傳統(tǒng)洗井方法效果不理想的缺點(diǎn),設(shè)計(jì)了一種基于C8051F120單片機(jī)的洗井自動(dòng)控制系統(tǒng)。該洗井自動(dòng)控制系統(tǒng)能夠連續(xù)有效地采集洗井過程中的液體流量和濁度,通過分析出液
2013-03-06 15:36:4051 基于I2C總線的處理器的聯(lián)網(wǎng)設(shè)計(jì)方案
2017-01-26 11:36:5511 為了實(shí)現(xiàn)對(duì)水下機(jī)器人周圍環(huán)境的監(jiān)測(cè),提出了一種基于PC104與C8051F120的水下機(jī)器人環(huán)境監(jiān)測(cè)系統(tǒng)設(shè)計(jì)方案,并完成系統(tǒng)的軟硬件設(shè)計(jì)。
2018-03-21 09:23:002011 
嵌入式設(shè)備憑借其與使用者之間的親和力、自然的人機(jī)交互界面,得到了迅速的發(fā)展,滲透到生活中的各個(gè)角落。本文介紹的設(shè)計(jì)方法是以高性能的8位單片機(jī)C8051F120作為核心處理器,SRAM作為系統(tǒng)的顯存
2019-08-09 08:07:001724 
為實(shí)現(xiàn)片上系統(tǒng)不同P核之間的協(xié)議轉(zhuǎn)換與高效通信,提出一種高效率PLB2AⅪI總線橋設(shè)計(jì)方案。利用PLB與AXI高性能總線的帶寬優(yōu)勢(shì),通過引入流水線傳輸和讀寫重疊傳輸機(jī)制,將PLB總線協(xié)議中的地址
2021-03-30 15:21:338 混合信號(hào)ISP-Flash系列單片機(jī)C8051F120
2021-09-01 14:15:5632
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論