很多人了解過CANFD,可能知道CANFD CRC段與傳統CAN CRC差距是CRC多項式不同,但實際CANFD CRC段與傳統CAN的差異遠不止這些。
2022-07-15 11:56:06 1868
1868 先楫的CANFD外設,有兩個CANFD的IP,其中HPM6700系列,HPM6400系列、HPM6300系列使用的是CAN,包括了經典CAN和CANFD。
2023-08-01 10:28:561444 
一、概述先楫的CANFD外設,有兩個CANFD的IP,其中HPM6700系列,HPM6400系列、HPM6300系列使用的是CAN,包括了經典CAN和CANFD。而HPM6200系列則使用的MCAN
2023-08-02 08:20:521128 
本篇文章將以RA6E2為例,介紹如何使用瑞薩電子FSP CAN-FD lite的堆棧來設計和實現基于CAN的簡易系統。最后,使用兩套FPB-RA6E2和CAN收發器模塊通過CAN實現相互通信,按下一塊板上的按鍵S1會發送CANFD數據。
2023-10-25 15:53:38407 
任何 CANFD 消息,如果把 cy_stc_canfd_config_t 的 .canFDMode 改為 false 就可以收到,是因為 BAUDRATE 與 DATARATE 的關系嗎 ?,我應該要填多少 ?,該怎么從代碼推算呢 ?
2024-02-01 07:27:58
,有利于設計出更加健壯的程序,對一些未提到的細節做以補充:TXBUFF 和 TXFIFO/TXQUEUE 總是從 TXBUFF 開始查詢CANFD 的發送模式非常靈活,沒有特別需求直接選用
2022-03-21 14:35:06
ID 進行匹配,匹配成功之后按照用戶的設置的規則進行響應,在 STM32H7 的 CANFD 中,相對于 BxCAN 濾波器進行了升級,本文只做 CAFDN 的濾波器說明,不做對比。在認識濾波器之前
2022-04-14 15:43:18
CANFD的來源是什么?CANFD有哪幾個顯著特點?CANFD節點如何與經典CAN總線正常通信呢?
2021-06-16 09:31:08
如題。需要用到canFD,升級帶寬。
2021-09-11 21:09:51
筆記一 . 做開關電源環路補償時候為了使得環路更加穩定。1 .-- > 希望開關電源的相位裕量在45° 以上,2. – > 希望開關電源的增益裕量在10db 以上3.– > 希望
2021-10-29 08:15:25
信號EVM就惡化了,但頻率誤差的確補償了。如果我把TXLO也加上1.8KHz的偏移,即TXLO=847M+1.8KHz,發送的基帶信號先偏移-1.8Khz抵消掉LO的偏移,然后再補償頻率偏差。這樣的EVM就很好。能從原理上解釋一下為什么嗎?基帶信號做頻偏補償怎么會影響最后的RF EVM?
2018-08-17 07:15:41
我下載了LLCE CAN驅動程序,運行LLCE CAN示例代碼ok,目前示例代碼中can frame是CANFD,我想將CANFD改成經典CAN(CAN2.0),但是我找不到任何與can frame format setting相關的選項,
請告訴我在哪里可以找到與幀格式設置相關的選項,謝謝。
2023-05-12 06:28:36
這里為什么要對PORTG做設置,板子貌似沒有GPIO G吧,另外,奇怪的是,看了神舟的資料,竟然也有這一句?
2019-03-14 06:35:29
HPM6750 的4個CANFD以及USB HS能一起運行嗎,這樣就能做個CANFD采集盒了,不知道是否可行?
2023-05-26 07:07:22
我們使用 NXP 的 I.MX6ULL 處理器和 TCAN4550 進行 CANFD 通信。我們在傳輸 CAN 數據時面臨 SPI 延遲問題。CAN 數據傳輸/接收是根據 SPI 中斷發生的。我們
2023-05-05 10:29:57
現在我在用M467-64PIN 進行解算與數據收發;
M467的CANFD通道,如何使傳送效率最高?
例如使用1M+5M傳輸模式,如何使傳送效率最高?
例如循環發送64 Byte的計算數據,需要
2024-01-16 06:18:52
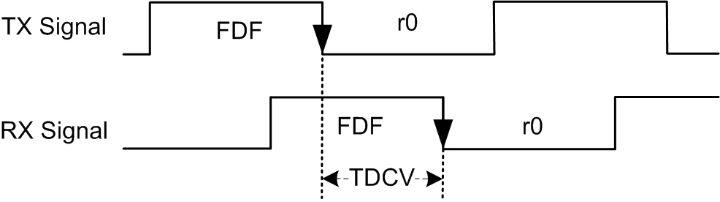
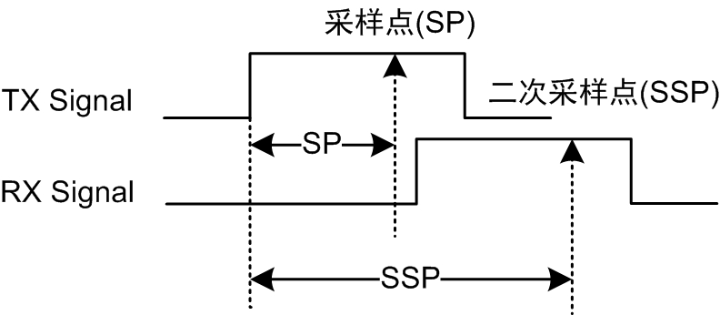
如附圖所示,在發送和接收消息期間,控制器開始發送比特的時間與從接收終端接收到位置的時間之間存在延遲,即發送節點的延遲。
數據字段中 CANFD 的采樣點需要采用發送節點延遲補償機制(TDC 機制
2024-01-22 07:29:27
PESD2CANFD24L-TR
2023-03-29 22:45:40
PESD2CANFD24L-UX
2023-04-06 23:32:54
PESD2CANFD27L-TR
2023-04-06 23:34:26
PESD2CANFD36VT-QR
2023-04-06 23:33:59
TC275D系列的芯片支持標準CANFD,是否也能配置成非標準CANFD的呢,有那位技術人員配置過嗎?
2024-02-06 08:31:22
TC297 CANR 支持 CANFD 嗎? 我目前正在測試CAN達到5Mbit/s的 節點。但是,在以 5Mbit/s 的速度測試 CANR 節點的速度時,會出現錯誤。
2024-01-29 06:09:19
。我是用來做四軸的,肯定希望事實反映姿態情況,那這個Kp是越大越好嗎?我有的飛控算法上看到別人的Kp只有0.6,我試了一下延遲會非常嚴重,Kp=2的時候飛機從水平變換到垂直90度的時候延遲五六秒左右。請問大神這個是有什么補償方法嗎?順便問一句,互補濾波算法的參數Kp,Ki的取值,有什么方法嗎?
2017-12-26 12:31:26
tc234六路都是canfd嗎
2024-02-19 07:37:18
同一電源下,所產生的電流與電感電流方向相反的電器接在線路上,用來抵消電感電流。這樣,既不影響電動機產生磁場,又能消除或減少線路上的電感電流,這種電器就是電容器。這種電容器就叫補償電容器,也叫電力電容器
2017-09-15 14:04:34
1、為什么要對產品做電磁兼容設計?答:滿足產品功能要求、減少調試時間,使產品滿足電磁兼容標準的要求,使產品不會對系統中的其它設備產生電磁干擾。2、對產品做電磁兼容設計可以從哪幾個方面進行?答
2021-09-17 08:22:28
EMC設計經典85問1、為什么要對產品做電磁兼容設計?答:滿足產品功能要求、減少調試時間,使產品滿足電磁兼容標準的要求,使產品不會對系統中的其它設備產生電磁干擾。2、對產品做電磁兼容設計可以從哪幾個
2021-09-02 09:01:44
在傳輸鏈路中為什么要在發送和接收端使用均衡技術呢?總結主要的一點,就是補償傳輸通路中的損耗,降低碼間干擾(ISI)。下面通過仿真結果對信號補償的必要性做一簡要解釋。
2019-05-23 08:07:06
你好,我使用SDL的example中的CANFD代碼測試CYT2B75芯片CANFD模塊,對部分代碼進行了硬件適配修改,詳見附件,配置為每秒發送一次CAN報文。
問題:消息發送失敗,且電腦上位機無法
2024-02-02 06:57:56
補償的 SPI 主協議。它支持 SPI 時鐘頻率高達 16.7MHz 的 ADS8688 的 32 位通信協議。主要特色帶可調節信號路徑延遲補償的 SPI 主協議(無需借助外部硬件來實現信號路徑延遲
2018-11-12 17:00:36
FIFORx Buffer VS Rx FIFOTx Buffer, Tx FIFO, Tx Queue操作模式收發器延遲補償TDC時鐘校準低功耗模式現有BxCAN升級到CANFD下一篇用起來微信公眾號
2021-08-12 07:21:30
大家好,art-pi板上運行CAN2.0沒問題,收發自如,若想運行canfd,是不是需要對drv_fdcan.c做修改?比如一些參數配置等。
2023-02-08 11:40:44
你好,我在同一路CAN上配置經典CAN時能正常發送數據 ,但是按規格書配置為CANFD時,未能發送成功,想請問我以下配置是否正確。
cy_stc_canfd_config_t canCfg
2024-02-02 07:33:28
應用:本示例代碼使用M460系列MCU周期性傳送CANFD信息。
BSP 版本: M460_Series_BSP_CMSIS_V3.00.001.001
硬件: NuMaker-M467HJ
2023-08-29 07:14:25
隨著CAN FD與車載以太網的誕生與應用,給新一代智能網聯車的整車架構帶來顯著的變化,也給整車廠帶來新的機會和挑戰。針對目前CANFD升級較復雜的現狀,ZLG提供了有效解決方案,本文將做簡單的介紹。
2021-03-17 07:44:50
大家好,art-pi板上運行CAN2.0沒問題,收發自如,若想運行canfd,是不是需要對drv_fdcan.c做修改?比如一些參數配置等
2022-04-21 09:27:52
你好專家,我想把重置信號延遲幾微秒,然后發送出去。你能教我怎么做嗎?重排8 K
2019-10-23 10:02:58
使用 CANFD 時我不能使用沒有 FD_MODE 的那些但僅用于 CAN2.0 嗎?引腳如何知道使用的是哪種模式?
2022-12-13 06:12:58
我想將 CANFD 配置為 8MBPS 波特率,您可以幫我看看TESTBOARD_150PC_OUT如何配置嗎? 我配置了 2mbps 的波特率,工作正常,但無法配置 8mbps 的波特率,獨木舟和控制器之間存在同步問題,我收到 Canfd Tx 錯誤。
2024-03-04 06:31:07
數控機床多軸聯動時,只需要對單個軸進行反向間隙補償,補償時會出現多軸間不同步問題,請問有沒知道怎么解決的?
2018-09-27 11:19:16
就是讓一塊無線模塊發送一個信號,另一個模塊接收這個信號,其間從發射到接收只要不到1us的時間,這個能實現嗎?若我這樣做能實現上述功能嗎?就是在讓一塊無線芯片,一直處于發射狀態,并一直發射1,另一個
2015-03-17 16:52:36
我調通了兩個藍牙,并且也實現用兩個藍牙,打開兩個串口助手,互相發數據,這時候我按自動發送,我數據變化時,接收到的數據也馬上變化,沒有任何延遲,這樣的話我藍牙應該調對了。然后我stc12c5a60s2
2017-01-01 19:51:42
·····我對延遲線不太了解·那位大蝦能夠介紹一下·和使用方法·我要對一個信號進行幾微秒的延遲·····用哪款型號的比較好·最好能夠有使用方法·先謝謝了·
2011-09-05 09:16:12
當采樣點設置大于70%時,數據階段會出現協議錯誤,發送錯誤幀。數據波特率小于4M時無此問題,采樣點小于70%即可。
單片機:LPC5516
CANFD發射器:TJA1042/3
CANFD模塊時鐘:80MHz
通訊接口:Kvaser Hybrid
順便說一句:具有相同配置的 LPC54616 運行良好。
2023-05-16 06:59:46
CANFD_SetSIDFltr(g_pCanfd, 0, CANFD_RX_BUFFER_STD(0x111, 0));
CANFD_SetSIDFltr(g_pCanfd, 0
2024-01-16 08:19:13
我調通了兩個藍牙,并且也實現用兩個藍牙,打開兩個串口助手,互相發數據,這時候我按自動發送,我數據變化時,接收到的數據也馬上變化,沒有任何延遲,這樣的話我藍牙應該調對了。然后我stc12c5a60s2
2019-06-02 21:37:07
用的是探索者開發板,是在攝像頭實驗和藍牙模塊實驗上改的,攝像頭采集到的jpeg圖像發到串口3,就是藍牙模塊接的串口,藍牙模塊再把圖像發送出去,手機通過藍牙接收圖像,并在UI界面顯示。我想問的是手機
2019-04-08 05:23:05
OK1061-S上使用的CAN收發器TJA1040是否支持CANFD,我查這個型號是不支持CANFD的,但手冊里還是用這個測CANFD通訊了,想不太明白
2022-01-12 06:59:39
為什么要對產品做電磁兼容設計?
2021-03-17 07:31:56
現在有一個運放,在高頻段輸出相對于輸入假設有60度的延遲,這個延遲怎么由反饋網絡做出補償?我想到幾個辦法如下?
1、在反饋網絡作出處理,讓高頻段從反饋網絡輸入到輸出,這樣就避免了在運放內部的容性
2024-01-29 15:57:06
,也就是說40MIPS時,FOSC應該是80MHz。3、配置成功后發送 CANFD 報文,需要連接終端電阻,否則 CANFD 報文可能會失敗,因為數據場的傳輸速率有點高。4、預留足夠的 RAM 給...
2021-11-25 06:10:47
為什么CDMA需要對整個網絡同步?
如果碼序列在傳輸中有傳輸時延,在收端便不能解調恢復出原始數數據,需要在接受端通過人工的時延來補償傳
2009-06-01 20:27:55674 OP放大器有相位延遲補償的高速絕對值電路
電路的功能
采用通用OP
2010-05-11 11:55:102123 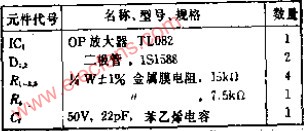
? 本例程主要講解 CANFD 總線異構通訊簡單實例。把 CANFD 分配給 M4 核,然后另外一塊開發板發送,M4 接收 CANFD 數據并通過異構通訊方式發送給 A7 在終端回顯。 1.硬件資源
2021-01-15 15:22:153330 ZPS-CANFD以科技保障總線安全 ZLG致遠電子首款CANFD總線分析測試產品正式發布!ZPS-CANFD是第二代總線開發輔助工具,是適用于CANFD、CAN、LIN總線的測量及測試儀器,旨在
2021-05-23 10:42:532118 是1:2,也就是說40MIPS時,FOSC應該是80MHz。3、配置成功后發送 CANFD 報文,需要連接終端電阻,否則 CANFD 報文可能會失敗,因為數據場的傳輸速率有點高。4、預留足夠的 RAM 給...
2021-11-16 20:51:05 12
12 在CANFD協議中,有個重要的概念TDC(Transmitter Delay Compensation)即發送延遲補償。為什么會存在發送延遲,又為什么CANFD要對發送延遲做補償? 為什么存在發送
2022-07-08 14:30:092566 很多人了解過CANFD,可能知道CANFD CRC段與傳統CAN CRC差距是CRC多項式不同,但實際CANFD CRC段與傳統CAN的差異遠不止這些。接下來,我們細說下CANFD CRC段帶來的變化。
2022-07-15 11:55:171247 由于CANFD采用了雙波特率形式:標準波特率(也稱仲裁域波特率)和數據域波特率,所以幀結構中不同段采用的波特率也不同。
2022-07-28 11:47:222857 tcp會將數據量較小,且發送時間間隔較短的數據一起打包發送,那么這里所講的時間較短是相比網絡延遲來說的。比如我們兩次發送間隔為0.00001s,那么網絡延遲為0.001s,這個時候兩次的數據就會打包發送,這是一種優化機制,但也就是這個優化機制導致粘包現象。
2022-08-19 09:33:101152 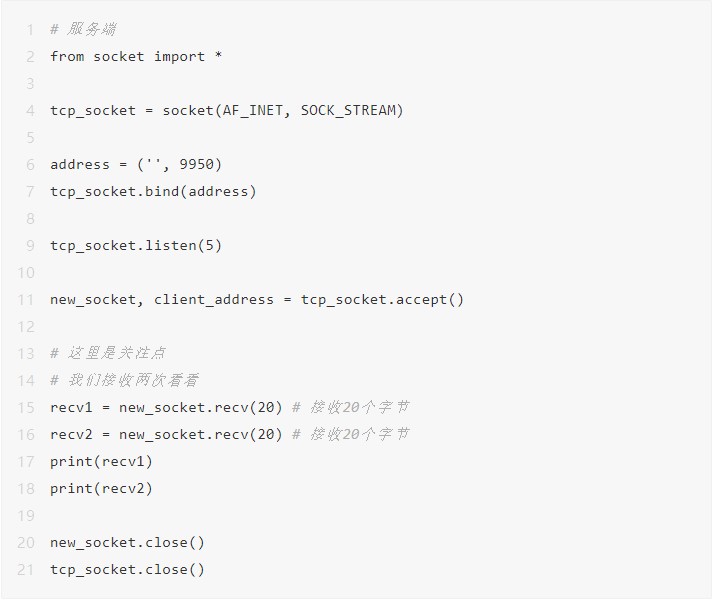
電子發燒友網站提供《CANFD網絡設備通訊協議.pdf》資料免費下載
2022-10-17 09:52:105 車載網絡的ESD保護-PESD2CANFD24VU-Q
2023-02-08 19:19:220 車載網絡的ESD保護-PESD2CANFD24VT-Q
2023-02-08 19:19:390 車載網絡的ESD保護-PESD2CANFD24VQC-Q
2023-02-09 18:50:010 車載網絡的 ESD 保護-PESD2CANFD24LT-Q
2023-02-09 18:58:060 車載網絡的 ESD 保護-PESD2CANFD27U-U
2023-02-15 19:11:440 車載網絡的 ESD 保護-PESD2CANFD24U-U
2023-02-15 19:12:371 車載網絡的 ESD 保護-PESD2CANFD24U-QC
2023-02-17 19:25:450 車載網絡的 ESD 保護-PESD2CANFD27V-QC
2023-02-17 19:26:230 車載網絡的 ESD 保護-PESD2CANFD24V-QC
2023-02-17 19:26:500 車載網絡的 ESD 保護-PESD2CANFD24V-T
2023-02-17 19:44:220 我們知道CANFD比CAN擁有更長的數據長度(最長64字節),更高的波特率(8Mbps甚至更高)。
2023-05-25 09:21:57889 
在CANFD協議中,有個重要的概念TDC(Transmitter Delay Compensation)即發送延遲補償,字面意思就是對發送延遲進行補償。那么為什么會存在發送延遲,又為什么CANFD要對發送延遲做補償?
2022-07-11 16:49:352044 
在CANFD協議中,有個重要的概念TDC(TransmitterDelayCompensation)即發送延遲補償。為什么會存在發送延遲,又為什么CANFD要對發送延遲做補償?為什么存在發送延遲
2022-07-22 15:13:50528 
很多人了解過CANFD,可能知道CANFDCRC段與傳統CANCRC差距是CRC多項式不同,但實際CANFDCRC段與傳統CAN的差異遠不止這些。接下來,我們細說下CANFDCRC段帶來的變化
2022-07-21 16:26:07441 我們知道CANFD比CAN擁有更長的數據長度(最長64字節),更高的波特率(8Mbps甚至更高)。那么波特率更高,數據更長的CANFD,一秒鐘最高可以發送多少幀CANFD報文呢?我們知道CANFD
2022-07-29 09:34:391219 在汽車領域CAN/CANFD網絡通信中,各節點(控制器)的質量不一致可能會引發錯誤、網絡故障或網絡癱瘓等問題,所以,為保證CAN/CANFD網絡的正常安全運行,必須要執行CAN/CANFD一致性測試。
2023-04-24 09:28:181986 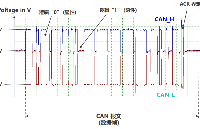
隨著汽車電子和工業的蓬勃發展, CAN總線上的設備數量和數據吞吐量都大大提升。為了滿足更高帶寬和數據的吞吐量,CAN FD應運而生。CANFD的延遲時間更短,具有更好的實時性能和更高的帶寬,可以顯著提升數據傳輸的效率。
2023-07-04 10:16:014366 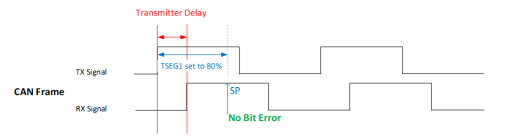
汽車嵌入式開發,很多時候,想學一些東西(eg:CANFD),但又不知道如何下手,這應該是大多數剛入行工程師的苦惱。目前項目上,CANFD的使用已經很普遍,而單純閱讀芯片手冊,可能無法透徹的理解CANFD,如果想透徹的理解CANFD,結合目標板去實踐是不二選擇。
2023-07-12 09:46:07589 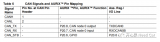
基于先楫半導體RISC-V的四路CANFD轉USB接口卡
2023-08-07 11:55:02551 
在瑞薩RA系列MCU產品中,目前RA4E2、RA4T1、RA6E2、RA6T2和RA6T3搭載了CANFD Lite(硬件手冊中成為CANFD_B)模塊,相關的詳細IP介紹,請參見之前的文章<RA MCU CAN和CANFD IP介紹>
2023-10-20 14:46:29522 
CAN與CANFD的區別 CAN與CANFD如何轉換? CAN(Controller Area Network)是一種廣泛應用于汽車和工業控制系統等領域的串行通信協議,用于在不同的設備間傳輸數據
2023-11-22 16:37:482717
 電子發燒友App
電子發燒友App


 ??為什么存在發送延遲?
??為什么存在發送延遲?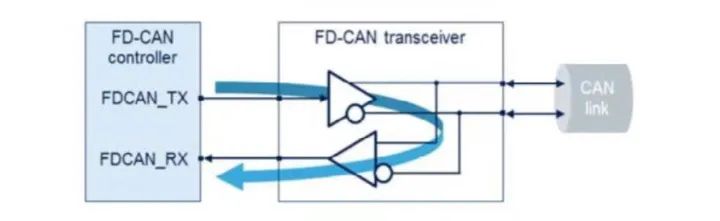







 工商網監
工商網監
評論