各位工程師在工業(yè)通訊現(xiàn)場最擔心遇到什么?通信干擾!CAN隔離模塊能夠有效解決CAN總線通信干擾問題,且較分立器件方案使用更簡便。本文為大家總結CAN隔離模塊在使用中需要注意的細節(jié),幫助大家搭建更可靠的CAN總線網絡。
2017-11-13 14:16:30 39379
39379 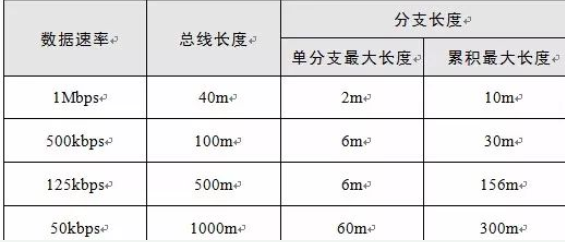
MCS-51單片機組成CAN通信系統(tǒng)需要擴展CAN控制器,本系統(tǒng)采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:005734 
可用于CAN通信的全新Anybus無線堡使基于CAN的重型機械和應用能夠通過強大的無線鏈路傳輸CAN數(shù)據(jù)。
2021-06-28 15:29:115012 
CAN通信協(xié)議,需要的看看。
2017-04-19 17:11:59
一位萌新為參加robomaster所做的前期準備–stm32基礎(六)(CAN通信)最近一直在忙英雄車程序框架的編寫,一直沒有時間更新(哭了) 12月份需要重新寫一份英雄車的工程文件,運用到2020
2021-08-20 06:13:55
CAN通信一個幀一定要求是11位么?比如PC通過CAN232模塊讀數(shù)據(jù)回來的超過11位,它是怎么處理的?另外,如果寫數(shù)據(jù)到指定地址,數(shù)據(jù)超過11位,是怎么處理
2012-09-17 09:07:17
CAN-bus 網絡采用直線拓撲結構,總線的2 個終端需要安裝120 ? 的終端電阻;如果節(jié)點數(shù)目大于2 ,中間節(jié)點不需要安裝120 ? 的終端電阻。
這句話是什么意思,如果我用四個CAN模塊通信,我怎么判斷哪兩個是中間節(jié)點???
2019-04-03 21:35:03
CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協(xié)議。在當前的汽車產業(yè)中,出于對安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統(tǒng)被開發(fā)了出來。
2020-03-24 09:00:57
各位好,在下想請教一下幾個問題:問題描述:核心模塊(EMS6802)+原配置的底板,can能正常通信;核心模塊(EMS6802)+自己做的底板,can不能正常通信;問題表現(xiàn)在:當用自己的底板時,核心
2018-01-25 14:57:55
最近測試中在整車加入一塊傳感器通信的板子,結果加上去就無法通信,開始一直以為是程序問題,后來直接debug單片機程序。發(fā)現(xiàn)CAN的發(fā)送程序已經執(zhí)行,可是總線上沒有信號。最后發(fā)現(xiàn)是硬件問題,匹配
2021-08-20 08:12:42
一、can通信介紹1、基本概念:CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協(xié)議。在汽車產業(yè)中,出于對安全性、舒適性、方便性、低
2021-08-19 07:58:04
各位大佬,有沒有Libview與CAN通信的教程可以學習下。大致想完成 :做一個界面,成功接收到下位機相應can消息后指示燈亮。然后也可以發(fā)送can消息到下位機。新手上路,想找個詳細點的教程,好好學學。~~
2016-10-14 14:10:11
CAN 簡介CAN 是控制器區(qū)域網絡(Controller Area Network) 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協(xié)議。在當前的汽車產業(yè)中,出于對安全性、舒適性、方便性
2021-08-19 09:31:07
各位好,我在使用了正點原子的CAN的通信程序后,發(fā)現(xiàn)CAN只能在CAN發(fā)送數(shù)據(jù)的過程中,使能接收中斷接收數(shù)據(jù);不能夠主動接收數(shù)據(jù),請問這是什么原因?能否發(fā)下代碼或例程?謝謝各位了。
2020-12-12 19:42:11
STM32奮斗板-CAN通信DEMO-V3/STM32奮斗板-CAN通信DEMO-V3/CM3/STM32奮斗板-CAN通信DEMO-V3/CM3/core_cm3.cSTM32奮斗板-CAN通信
2021-08-19 06:45:43
目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點3.CAN總線物理層4.CAN報文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點2.STM32CAN架構
2021-08-19 06:34:16
最近項目上需要編寫一個labview與USBCAN通信的上位機程序哪位高手有程序能否發(fā)我一份學習CAN設備是周立功的CAN-E-U非常感謝 郵箱2322792898@qq.com
2012-09-24 20:36:56
負載箱有2路CAN,通過串口線同時連到NI-CAN 的DB9端,在上下位機調試過程中,拔掉CAN卡的DB9端,CAN數(shù)據(jù)通信斷開,但是上位機查看數(shù)據(jù)為阻塞,上位機程序死了,這種問題是什么情況引起的?求解
2014-03-04 18:13:58
本帖最后由 alan7lanshui 于 2018-3-16 18:02 編輯
stm32板子,斷電重啟之后,無法進行CAN通信,只有在第一次寫入程序時,可以進行CAN通信,這是
2018-08-19 06:26:26
stm32can通信代碼,關于 CAN23.1.1 CAN 電氣特性與協(xié)議控制器局域網(Controller Area Network,CAN),是由德國BOSCH(博世)公司開發(fā),是目前國際上
2021-08-05 06:07:21
stm32的can總線理解及應用——程序對應stm32f103系列CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協(xié)議。它的通信速度
2021-08-19 06:26:04
CubeMX STM32實現(xiàn)CAN通信——數(shù)據(jù)收發(fā)CAN通信CAN協(xié)議CubeMX設置代碼部分過濾器初始化CAN發(fā)送函數(shù)CAN接收中斷CAN通信在工業(yè)上,CAN通信和485通信用得比較廣泛。上一篇
2021-08-20 06:32:16
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
做了一塊基于STM32的板子,CAN收發(fā)器用的是TJA1050;進行CAN通信時總是出錯。板子連接USBCANI轉接器,轉接器的USB口連接電腦,電腦里調用USBCANI自帶的收發(fā)軟件。可是發(fā)送數(shù)據(jù)
2013-10-28 21:35:03
編寫的基于labview的CAN通信程序只能打開CANETE設備,其他設備如USBCAN打不開,為什么?
2017-08-20 19:27:38
你好呀,我正在嘗試將一個 CAN 節(jié)點 (BMS) 連接到總線,并使用另一個節(jié)點 (VCU) 來處理數(shù)據(jù)以根據(jù)消息啟動少數(shù) LED。這是目標語句。 我知道 CAN 在理論上是如何通信的。但是我需要
2023-03-27 06:02:05
在開發(fā)板上有CAN總線,怎樣來進行CAN總線的通信呢?希望能普及一下這方面的知識或者提供些相關的例程。如果有高手做過,請介紹一下開發(fā)的過程。
2019-09-30 04:35:02
如何實現(xiàn)雙CAN通信?
2022-02-28 09:48:14
總結一些最近做項目對CAN通信的過濾器配置的理解;這里我使用STM32F105系列的芯片,有2路CAN,我使用的是CAN2,過濾器可以設置從15開始,當然,從1開始也是沒有問題的;當設置了CAN
2021-08-20 07:14:33
TIDA-01255 參考設計是專為隔離式 CAN 通信而設計的,它被廣泛使用于汽車環(huán)境。在混合動力汽車與電動汽車 (HEV/EV)中 、一款完善的高壓網絡相對于底板接地是浮動的。在浮動的高低
2018-06-28 10:51:24
CAN 簡介CAN是 Controller Area Network的縮寫(以下稱為 CAN),是 ISO 國際標準化的串行通信協(xié)議。在當前的汽車產業(yè)中,出于對安全性、舒適性、方便性、低公害、低成本
2021-08-20 07:56:13
介紹CAN 總線及其通信協(xié)議J1939, 并設計基于CAN 總線的多ECU 通信平臺的硬件結構; 闡述節(jié)點ECU 通信的軟件設計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-04-15 09:49:53 22
22 宏觀意義上來說,工程機械控制器主要由電源模塊、通信模塊、輸出驅動模塊、輸入模塊和MCU模塊構成。CAN通信是一種多主總線,每個節(jié)點機均可成為主機,且節(jié)點機之間也可進行通信。控制器采用
2022-08-30 16:20:15
介紹CAN 總線及其通信協(xié)議J1939, 并設計基于CAN 總線的多ECU 通信平臺的硬件結構; 闡述節(jié)點ECU 通信的軟件設計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-05-16 14:19:0828 本文設計了一種基于DSP 和CAN 通信的分布式電源系統(tǒng)監(jiān)控平臺。本系統(tǒng)充分利用了DSP 高速、實時、外設集成度高、擴展性強等特點和CAN 總線通信的高安全性和抗干擾性等優(yōu)點。并
2009-06-10 13:30:3114 本文針對賓館、酒店的客房控制和管理系統(tǒng),介紹了基于CAN 總線的客房通信控制器的硬件電路結構、原理及軟件結構和主程序流程。關鍵詞:CAN 總線;現(xiàn)場總線;通信技術;樓
2009-06-13 12:06:0313 本設計為光電穩(wěn)定跟蹤平臺開發(fā)CAN 驅動,以實現(xiàn)CAN 總線上設備間的通信。分析了linux 下標準設備驅動機制和CAN 總線通信模型,給出了光電穩(wěn)定跟蹤平臺中CAN 總線通信的硬件設計
2009-08-04 08:33:4830 uClinux 是針對微控制領域設計的嵌入式操作系統(tǒng)。本文介紹了基于uClinux 嵌入式操作系統(tǒng)的CAN 通信卡設備驅動程序的實現(xiàn)。描述了CAN 通信卡驅動程序的框架以及如何將驅動程序加
2009-08-13 10:51:1811 斑梨電子樹莓派Pico擴展板 CAN長距離通信模塊 SPI接口產品特性板載 Raspberry Pi Pico 接口,適用于 Raspberry Pi
2023-02-10 11:16:42
本文設計了一種基于DSP 和CAN 通信的分布式電源系統(tǒng)監(jiān)控平臺。本系統(tǒng)充分利用了DSP 高速、實時、外設集成度高、擴展性強等特點和CAN 總線通信的高安全性和抗干擾性等優(yōu)點。并
2009-12-16 11:16:2221 CAN通信波特率設置
LM3S2000、LM3S5000、LM3S8000系列CPU內部有1~3路CAN控制器,通過對CAN位定時寄存器CANBIT及CAN波特率預分頻擴展寄存器CANBRPE的設置可以得到需要的CAN
2010-04-06 18:00:3924 摘要:介紹CAN總線及其通信協(xié)議J1939,并設計基于CAN總線的多ECN通信平臺的硬件結構;闡述節(jié)點ECN通信的軟件設計方法,在仿真試驗的條件下實現(xiàn)數(shù)
2006-03-11 13:21:031634 
摘要:以MC68376集成CAN控制器為例,闡述了純電動車(Eleotdc Vehicle,簡稱EV)電控系統(tǒng)采用SAEJl939通信協(xié)議實現(xiàn)CAN總線通信的設計要點,給出了基于CAN通信的動力蓄電池監(jiān)
2006-03-24 12:46:151202 
CAN總線通信電路
2008-10-14 13:59:176323 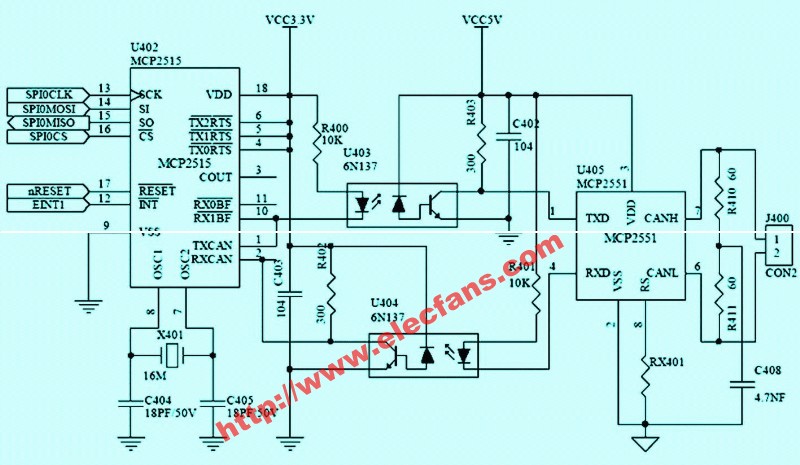
綜合CAN和LIN通信功能的TPMS系統(tǒng)設計和應用
引言
本文通過TPMS在國外某車型上的設計和應用,詳細介紹TPMS軟硬件設計方法。本方案中綜合了CAN、LIN總線的設計
2009-11-18 10:41:042705 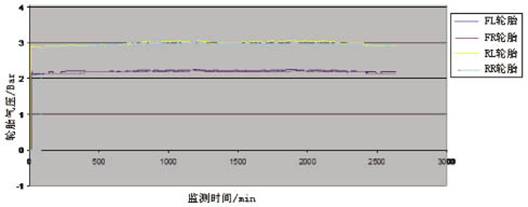
CAN通信網在汽車中的應用研究
控制局域網CAN(ControllerAreaNetwork)是德國Bosch公司為解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換而應用開發(fā)的一種通信協(xié)議
2009-12-19 10:47:48655 基于PIC單片機的RS-232轉CAN通信適配卡設計
CAN總線-控制器局部網(CAN)國際標準(ISO11898)。CAN總線與一般的通信總線相比,它的數(shù)據(jù)通信具有突出的可靠性、實時性和靈活性
2010-01-27 16:24:061328 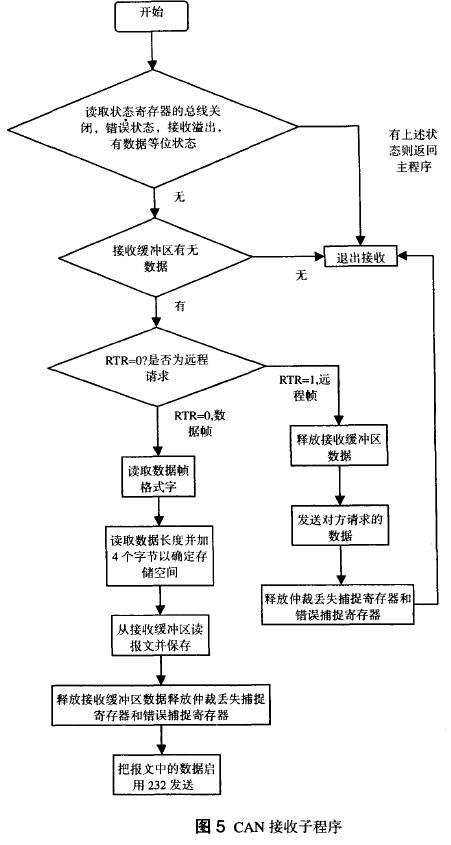
基于CAN核的四冗余通信板設計與仿真
隨著電子技術、計算機應用技術和EDA技術的不斷發(fā)展,利用FPGA進行數(shù)字系統(tǒng)的開發(fā)已被廣泛應用于通信、航天、醫(yī)療電子、工業(yè)控
2010-02-03 16:38:46903 
設計了多個CAN總線的通信節(jié)點,通過PCI9810-CAN適配卡上的CAN總線,組成一個局域通信網絡,實現(xiàn)了PC機對各個節(jié)點的監(jiān)控和通信以及節(jié)點間的自由通信。
2011-10-19 14:57:5667 基于對CAN 總線控制器的功能分析, 并應用Verilog語言進行軟件設計, 從而實現(xiàn)CAN節(jié)點之間的通信功能。
2012-04-28 09:56:5413818 
基于CAN總線系統(tǒng)結構構成,通過工程實踐的具體應用以及對CAN控制器及收發(fā)器硬件結構的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線通信的節(jié)點同步機制、總線地址機制、總
2012-05-08 15:23:04404 CAN總線通信詳解。
2016-03-30 16:46:100 CAN通信實驗。
2016-03-30 16:48:000 CAN_2.0中文_通信協(xié)議。
2016-03-30 16:51:0623 基于FPGA的CAN總線通信系統(tǒng),下來看看。
2016-05-10 11:47:1334 Ex011-TCP通信_uIP CAN例程 Ex011-TCP通信_uIP CAN例程
2016-07-13 17:31:4616 CAN-bus現(xiàn)場總線基礎方案_通信
2017-02-07 17:16:4012 基于CAN總線的EPS通信系統(tǒng)研究
2017-01-14 11:27:1217 基于雙CAN總線的數(shù)字伺服通信協(xié)議
2017-09-01 14:25:428 CAN總線通信協(xié)議的分析和實現(xiàn) CAN總線通信協(xié)議以及其實現(xiàn)方法
2017-09-04 08:45:3340 總線式的網絡通信有缺點:只能夠一條直線或曲線,不能夠開叉,不能夠環(huán)形閉合。開叉布線的問題可以通過加HUB來解決。本文介紹的是如何通過CAN的HUB來實現(xiàn)3個CAN節(jié)點的環(huán)形網絡通信。
2017-10-05 18:36:277996 
CAN總線通信是目前汽車電子和工業(yè)現(xiàn)場的主流通信,CAN總線憑其穩(wěn)定性、時效性、抗干擾性、傳輸距離遠及低成本等特點,占領總線巔峰,但是隨著越來越多的電子產品的誕生,再加上工業(yè)現(xiàn)場等干擾,即使是CAN
2018-05-07 17:09:357545 C2837x入門指南(二十五)—通信系統(tǒng)之CAN
2018-08-17 02:02:004421 在理解了CAN總線的自通信程序后,再來探討CAN總線間的相互通信變得容易了許多。對于是自通信還是相互通信,這個肯定是需要對寄存器進行必要的設置 的,分析PIAE的兩個程序后不難發(fā)現(xiàn),自通信和互通信
2018-09-21 15:06:021466 CAN協(xié)議的通信方法為不歸零(NRZ)。沒有同步信號添加到每個位的開頭或結尾。
2021-04-15 16:06:594662 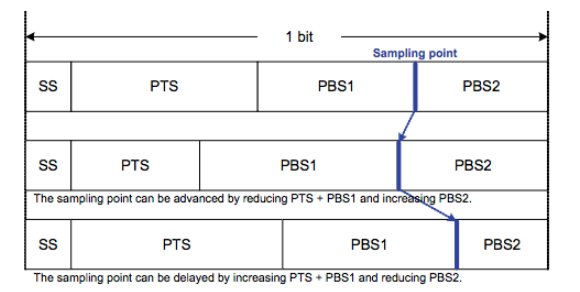
根據(jù)CAN通訊矩陣,計算總線負載率,其中預設有250、500波特率的計算,只需選擇波特率,然后將CAN通信不同周期的ID總數(shù)輸入,即可計算出來。
2020-11-20 08:00:0020 本文檔的主要內容詳細介紹的是UART通信轉CAN通信配置軟件。
2021-03-01 08:00:0035 CAN總線通信協(xié)議詳細如下。
2021-04-19 16:54:3875 使用MCP2515以及TJA1050構成CAN節(jié)點通信使用can收發(fā)器TJA1050芯片和CAN協(xié)議控制器MCP2515構成CAN節(jié)點,這里選用PIC16F877A型號單片機作為外部輸入連接裝置
2021-11-16 20:21:0541 CAN入門書之中文版CAN通信協(xié)議
2021-11-18 16:36:310 單片機STC15雙機通信&異步串行通信Proteus矩陣鍵盤 中斷
2021-11-18 14:36:0234 說明:其端口和can需要設置波特率:250/500,和can的類型,can1/can2串口直接和模擬量通信需要設置串口的信息,如下圖:藍牙和模擬量通信,不需要任何設置目前主流的是藍牙和can通信,這個時候就需要藍牙設置一下波特率和can類型了。...
2021-11-30 19:36:048 學習單片機,通信方面可以說是一大重點最近做項目需要用到can通信,這里分享一下自己的can通信學習代碼,我使用的是正點原子的精英開發(fā)板,參考的資料也是正點原子的庫函數(shù)指南,此外我也看完了can入門
2021-12-04 17:21:0444 CubeMX STM32實現(xiàn)CAN通信——數(shù)據(jù)收發(fā)CAN通信CAN協(xié)議CubeMX設置代碼部分過濾器初始化CAN發(fā)送函數(shù)CAN接收中斷CAN通信在工業(yè)上,CAN通信和485通信用得比較
2021-12-04 18:36:1213 基于STM32F429HAL庫的CAN通信代碼* 最近在學正點原子阿波羅STM32F429開發(fā)板的CAN通信章節(jié),例程里只提供了查詢方式實現(xiàn)的CAN通信實驗。昨天又復習了一遍UART串口實驗的中斷
2021-12-04 19:06:0919 Can通信接口學習筆記
2021-12-08 16:36:0623 STM32f103c8t6矩陣鍵盤程序(串口通信)資料匯總
2021-12-08 17:44:2970 STM32F407 CAN2 通信代碼測試收發(fā)通過硬件電路圖 CPU CAN2 接口 CAN總線芯片連接電路圖 代碼中需要定義的宏 CAN2 配置代碼 CAN2配置代碼 中斷服務函數(shù)
2021-12-14 18:38:3935 APM32E103RET6_CAN_聯(lián)合后CAN無法通信
2022-11-09 21:03:410 APM32F103RCT7_CAN_CAN2無法通信
2022-11-09 21:04:000 APM32F103RCT6_CAN_CAN通信丟包
2022-11-09 21:04:031 作為實時性要求比較高的工業(yè)控制底層網絡,CAN協(xié)議只分為3層:物理層、數(shù)據(jù)鏈入層和應用層。CAN通信協(xié)議有4種不同的幀格式:數(shù)據(jù)幀、遠程幀、錯誤幀和超載幀。
2022-12-27 10:57:041179 【導讀】介紹了CAN總線與伺服電機的特點,并討論了伺服電機基于CAN總線的通信控制特性。
2022-12-27 10:57:565482 CAN 是Controller Area Network 的縮寫(以下稱為CAN),該通信使用的是ISO11898標準,該標準的物理層特征如下圖所示。
2023-02-12 09:47:351241 CAN是Controller Area Network的縮寫,最初是專門用于汽車網絡的通信協(xié)議,與485協(xié)議相似,CAN也是一種2線制,采用兩根線的電壓差進行數(shù)據(jù)傳輸?shù)膮f(xié)議,隨著CAN協(xié)議的高性能
2023-03-01 14:50:002147 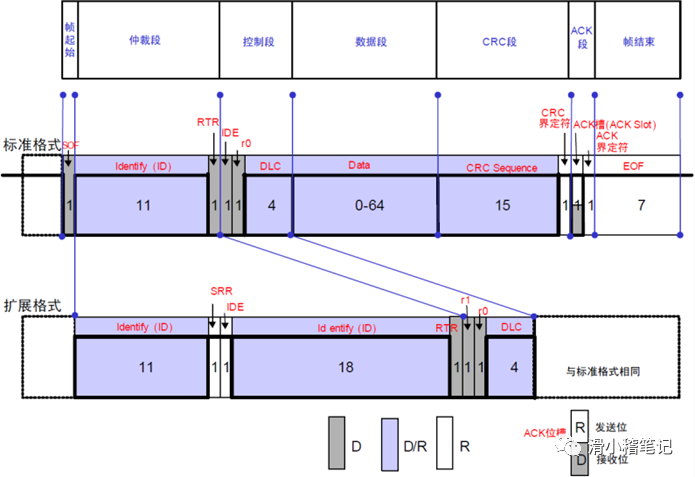
CAN與上位機通信詳細教程 提示:這里可以添加系列文章的所有文章的目錄,目錄需要自己手動添加本文使用32版HAL庫與上位機進行通信,使用按鍵按一次則發(fā)送一次數(shù)據(jù)給上位機,上位機發(fā)送一次
2023-05-09 14:41:429 經典CAN于1986年推出。第一代CAN通信技術取得了超過25年的成功。而且它仍然是車載網絡中的主導。 2012年,開始開發(fā)第二代CAN通信技術,即眾所周知的CAN FD,并在兩年后的法國巴黎第14
2023-05-15 16:11:271 點擊上方 藍字 關注我們 摘要:以FPGA 代替?zhèn)鹘y(tǒng)的單片機和外圍擴展芯片, 給出了CAN 總線通信節(jié)點的詳細設計方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設計實現(xiàn)通信
2023-06-18 11:15:011796 傳統(tǒng)的車載CAN總線最高支持500 kbit/s的傳輸速率,每幀只能承載8 bytes的數(shù)據(jù),由于傳輸速率和數(shù)據(jù)長度的限制,在自動駕駛和智能網聯(lián)對網絡通信的高要求背景下,使用傳統(tǒng) CAN 通信勢必會導致總線負載率過高從而導致網絡擁堵,傳統(tǒng)CAN總線通信的瓶頸逐漸凸顯。
2023-06-18 17:14:381854 
CAN總線(Controller Area Network)是一種廣泛應用于汽車、工業(yè)自動化和其他領域的串行通信協(xié)議。以下是幾種常見的CAN總線通信協(xié)議。
2023-08-18 14:40:128848 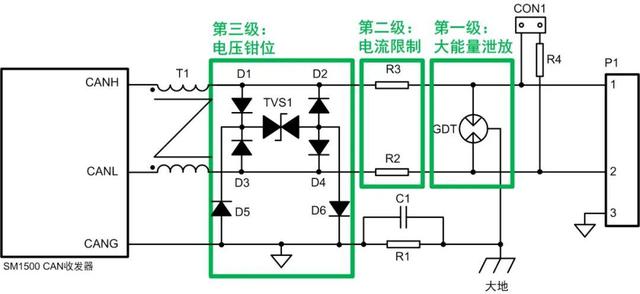
CAN總線屬于異步通信,因此就有通信波特率,而這個波特率發(fā)生器就位于CAN控制器內部。我們不需要了解它是如何產生的,但需要了解它的含義。這章節(jié)針對初學者講述以下兩點內容。
2023-08-25 12:33:551409 
PCI接口在CAN通信中有何作用? PCI(Peripheral Component Interconnect)接口是一種常見的計算機擴展接口,它為主板和外部設備的數(shù)據(jù)傳輸提供了快速、可靠的連接方式
2023-09-14 17:52:41670 CAN總線屬于異步通信,因此就有通信波特率,而這個波特率發(fā)生器就位于CAN控制器內部。我們不需要了解它是如何產生的,但需要了解它的含義。這章節(jié)針對初學者講述以下兩點內容。
2023-10-07 10:06:19353 
CAN通信波特率不對會怎樣?? CAN通信是一種流行的通信協(xié)議,它廣泛應用于許多現(xiàn)代車輛的系統(tǒng)中。CAN通信協(xié)議通過處理器之間的數(shù)據(jù)交換,實現(xiàn)車輛的控制。CAN通信協(xié)議的一項重要特性是其波特率控制
2023-10-11 17:19:331078 電子發(fā)燒友網站提供《基于ARM的雙CAN通信系統(tǒng)設計.pdf》資料免費下載
2023-10-27 11:21:532 主要開關矩陣產品
2022-06-16 16:01:134 CAN通信協(xié)議中有四種幀類型,分別是數(shù)據(jù)幀、遠程幀、錯誤幀和過載幀。
2024-01-30 09:18:05635
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網監(jiān)
工商網監(jiān)
評論