 電子發燒友App
電子發燒友App


?
?
最近在調試一個CAN總線的設備遇到一些問題,簡單總結一下。本文會對CAN總線進行簡單介紹,CAN的硬件鏈路層,協議層,以及調試的一些心得。
目錄
-
什么是CAN總線?
-
物理層
-
差分信號
-
連接方式
-
CAN節點
-
-
CAN協議
-
如何尋址?
-
幀類型
-
數據幀
-
遠程幀
-
錯誤幀
-
過載幀
-
-
消息時序以及同步
-
位時序
-
波特率
-
消息過濾器
-
-
如何配置?
-
總結
-
參考
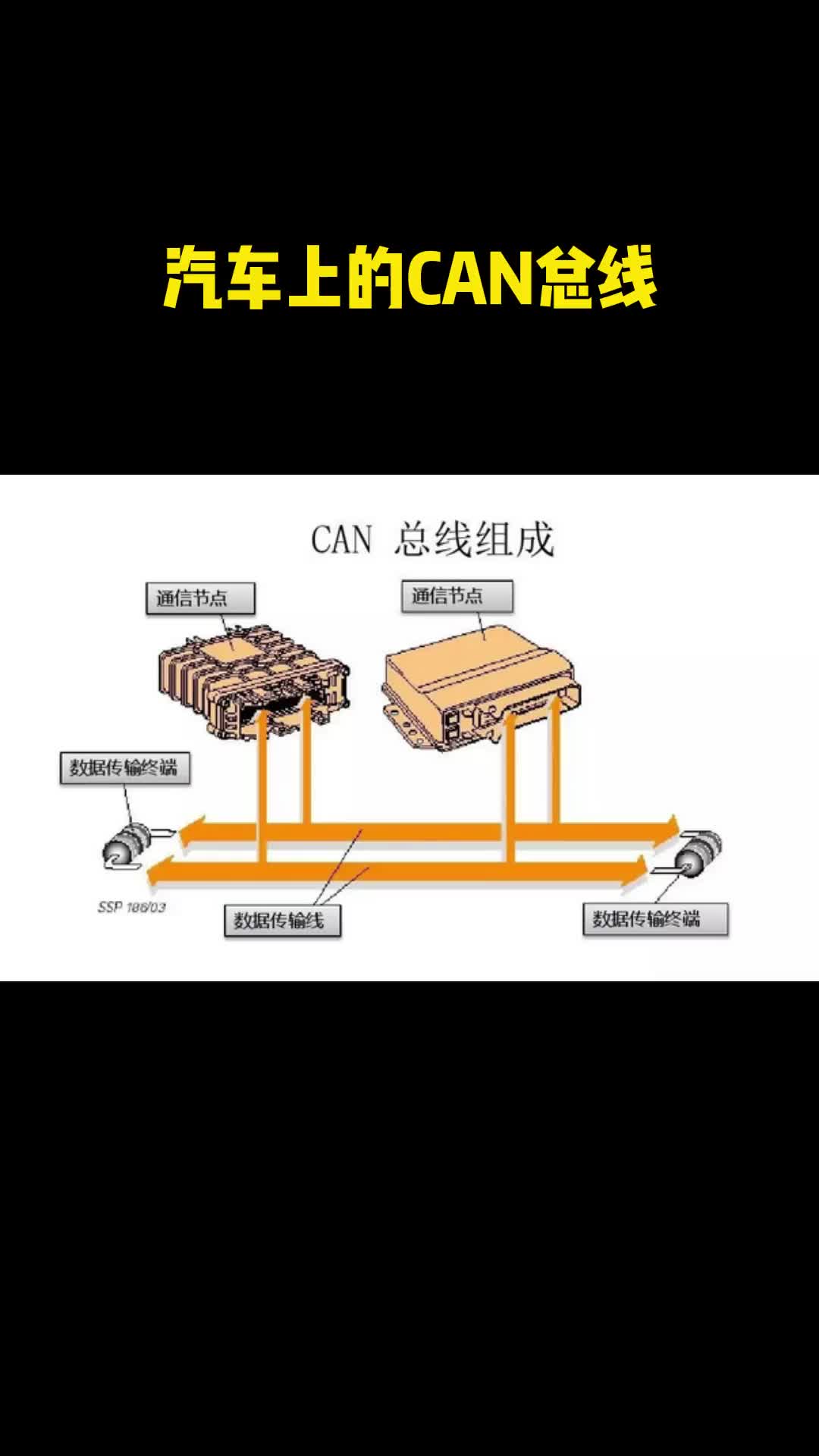
什么是CAN總線?
Controller Area Network,簡稱CAN或者CAN bus) 是一種功能豐富的串行總線標準,最早的CAN控制芯片在奔馳車上應用并量產,因為支持多主機,多從機的優點,所以一輛車所有控制器,傳感器,電子設備直接的通信只需要兩條線就夠了,大大優化了整車的布線。[^wiki can bus]
隨著技術的不斷發展,CAN發布了相應的標準,國際化標準組織,公布了CAN的不同標準;
| 標準 | 涵蓋內容 |
|---|---|
| ISO 11898-1 | 數據鏈路層 |
| ISO 11898-2 | 高速CAN的物理層 |
| ISO 11898-3 | 低速容錯CAN的物理層 |
ISO 11898-1?,ISO 11898-2是對應的設計標準,去搜索就可以知道這個技術點是如何進行設計的。
物理層
差分信號
這里我們介紹一下物理層,什么是物理層呢?就是CAN的電信號的傳輸過程。CAN是串行異步通訊,只有CAN_HIGH和CAN_LOW兩條差分信號線,數據通過差分信號的方式進行通訊,其優點就是可以增加信號的抗干擾能力,抑制共模信號的干擾;
具體如下圖所示;
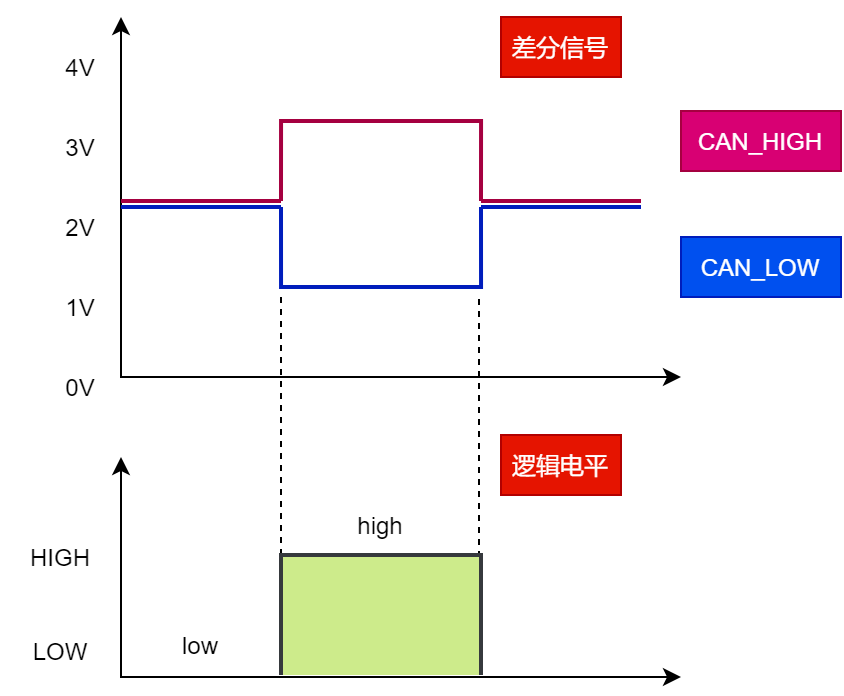
所以,信號在變成一個字節一個字節的數字信號之前,就是按照這種差分形式的模擬信號來傳輸的。
我們可以簡單地理解一下,當CAN_HIGH減去CAN_LOW大于某個閾值的時候,可以把它當做邏輯高,反之,當小于某一個閾值時,就變成邏輯低。
下面我們再來看看CAN總線設備之間是如何連接的。
連接方式
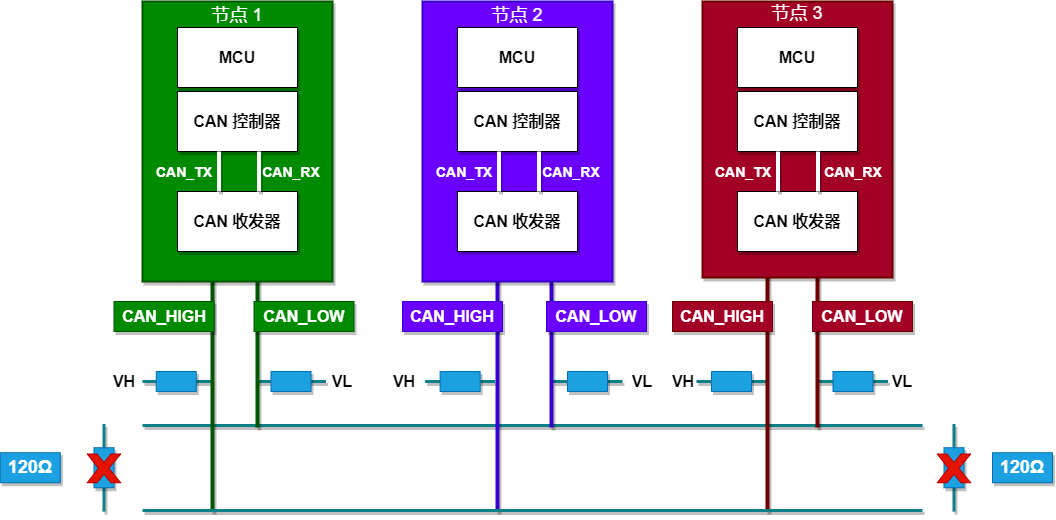
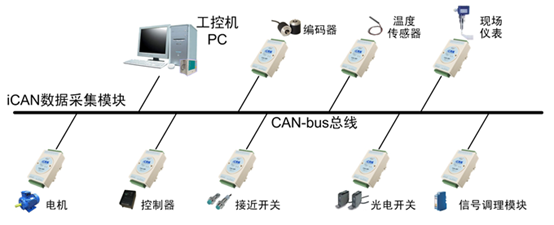
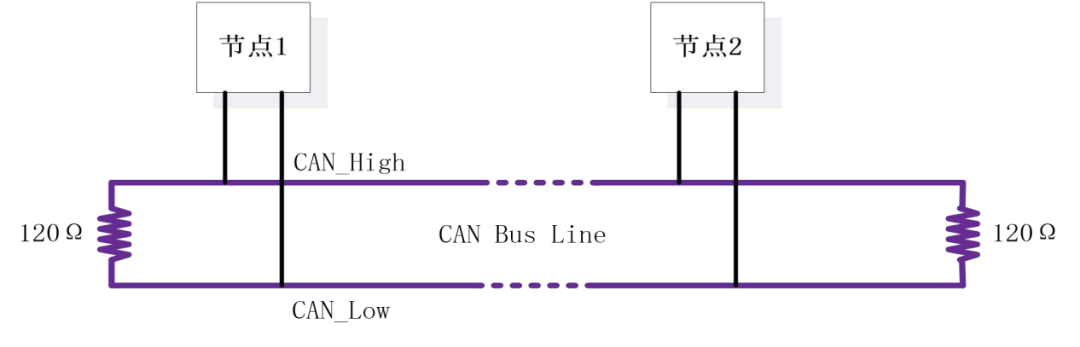
CAN總線支持多個節點掛載在總線上,比較類似I2C總線,可以在SCL和SDA上掛載多個從機,具體如下圖所示;
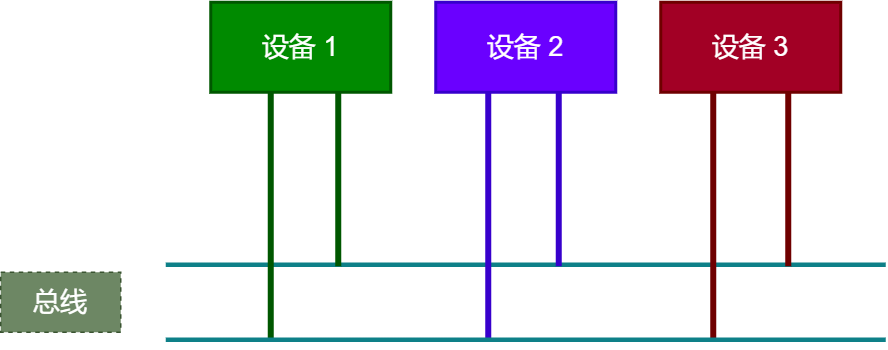
不過CAN總線其實沒有主從的概念,每個設備都是一個節點(Node),節點直接可以相互通訊,相較于I2C總線,CAN總線設置了終端電阻,常見的一種閉環連接模式,相對的還有開環的連接模式。
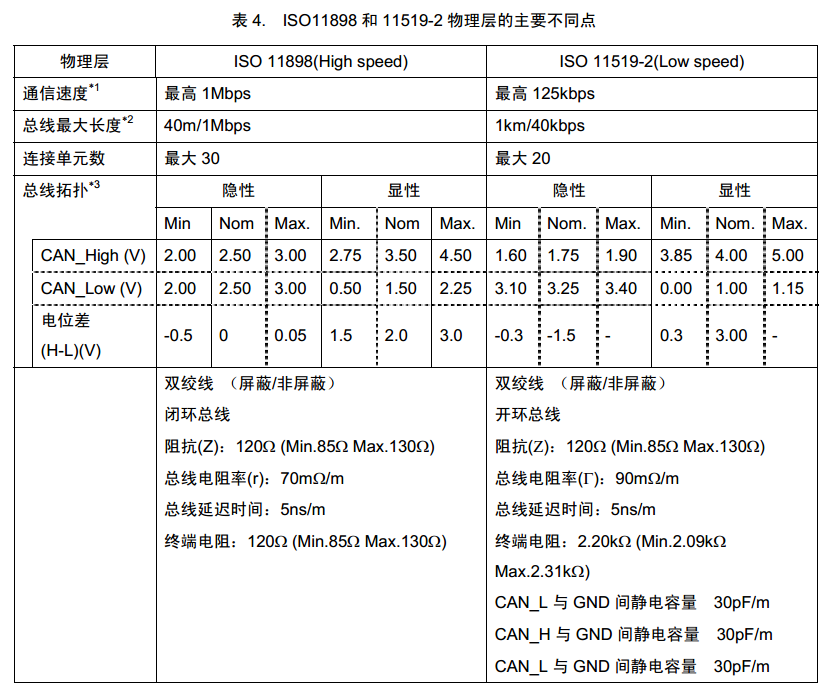
不同的連接模式,他們的通訊速率也大不相同,這里也就是高速CAN和低速CAN的區別。
兩條電線組成一條雙絞線,并且接有120Ω的特性阻抗。ISO 11898-2,也稱為高速度CAN。它在總線的兩端均接有120Ω電阻。
使用了120Ω終端電阻(這是CAN的ISO標準里規定的),這種模式的最高通訊速率可以達到1Mbps,下面是傳輸距離和傳輸速度的關系;
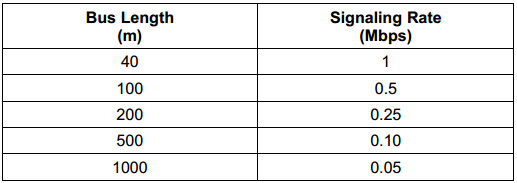 CAN總線長度與信號速率關系
CAN總線長度與信號速率關系高速CAN的拓撲結構具體如下所示;
還有一種是低速CAN,或者也叫做容錯CAN,低速容錯 CAN 總線將通訊的最大帶寬從 1 Mbps 降低到 125 Kbps,并且不再在總線的起點和終點使用兩個終端電阻,而是將電阻分布在每個節點上。具體如下圖所示;
由于高速CAN和低速CAN的拓撲結構不同,另外終端電阻的分布也不同,所以CAN_HIGH和CAN_LOW上的電平是不相同的,這里有隱性電平和顯性電平。
硬件上的連接基本上都搞清楚了,下面就是如何去實現一個具體的CAN節點。我們來簡單地介紹一下。
CAN節點
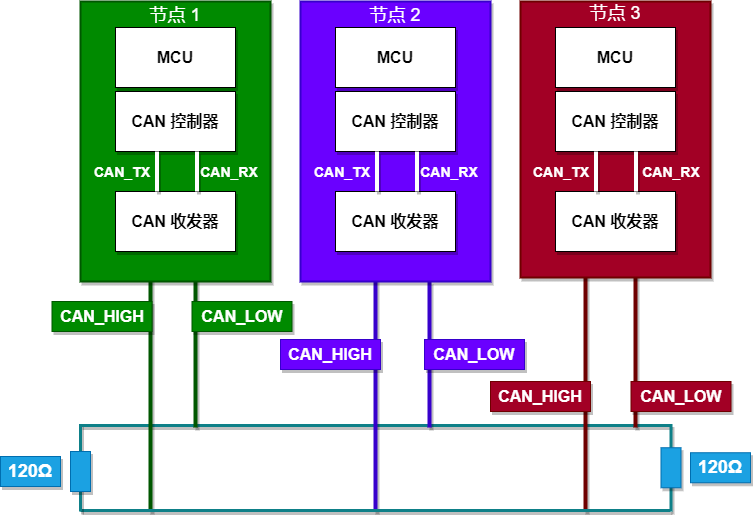
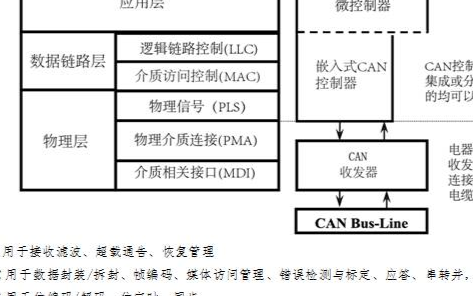
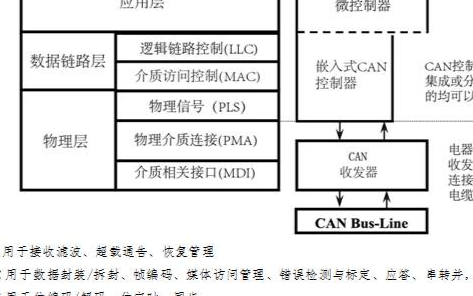
CAN節點通常分為三個部分;
通常一些單片機內部就集成了相應的CAN控制器外設,比如我們比較常用的單片機——STM32,所以我們常見的結構一般是這樣子的。
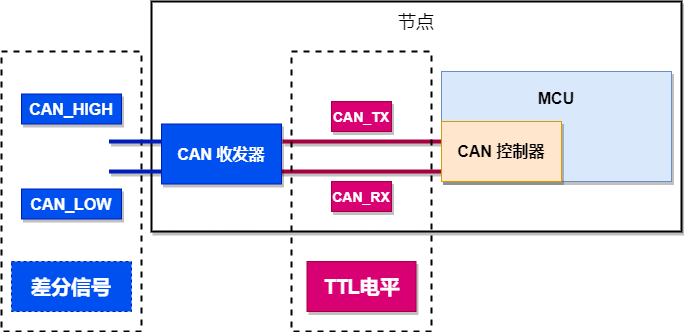
所以整體的流程是這樣的,如下:
- CAN總線上通過差分信號進行數據傳輸;
- CAN收發器將差分信號轉換為TTL電平信號,或者將TTL電平信號轉換為差分信號;
- CAN控制器將TTL電平信號接收,并傳輸給MCU;
那么,對于單片機開發者而言,需要關注的就是最終CAN控制器傳輸給MCU的數據,如何去配置CAN控制器,以及使用CAN控制進行數據的讀取和發送。
既然這樣,我們就不得不去了解一下CAN總線的通信原理,如何尋址,上層協議如何規定的。
CAN協議
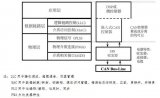
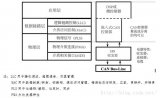
CAN協議和網絡協議比較類似,進行了分層的設計思想;
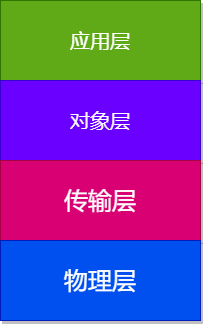
按照我的理解;
- 物理層就是前面提到過的硬件拓撲結構,包括高速CAN和低速CAN,而CAN收發器就屬于物理層;
-
傳輸層則是CAN控制器所需要做的事情,包括CAN時序,同步,消息仲裁,確認,錯誤檢驗等,這個比較復雜,如果只是應用開發,我認為,簡單了解一下即可;這一層需要做的工作包括:
- 故障約束;
- 錯誤監測;
- 消息驗證;
- 信息確認;
- 仲裁;
- 信息幀;
- 傳輸速率和時間;
- 路由信息;
- 對象層,MCU應該是屬于這一層,我們需要對CAN消息做信息的過濾設置,CAN消息的處理等等;
-
應用層就是基于對象層的進一步封裝,不同的CAN標準,比如工業自動化領域的
CANopen,汽車診斷ISO 14229 定義的UDS等等;
如何尋址?
CAN總線上的每個節點不需要設置節點的地址,而是通過消息的標識符(Identifier)來區別信息。因為CAN總線的消息是廣播的(就是大家都可以收到消息),比如總線上有節點A,節點B,節點C,那么節點A發消息,節點B和節點C都會收到消息;
節點B 和 節點C 會根據消息中的標識符,以及B和C中的消息過濾規則進行比較,如果不滿足規則,就不接受這條信息。
這里需要注意的是:
- 發送消息的時候,總線必須處于空閑狀態;
- 標識符越小,則消息獲取總線的優先級越高;
在這里我們已經了解如何尋址,下面就看一下消息幀了。
幀類型
CAN有4種幀類型:
- 數據幀:包含用于傳輸的節點數據的幀
- 遠程幀:請求傳輸特定標識符的幀
- 錯誤幀:由任何檢測到錯誤的節點發送的幀
- 過載幀:在數據幀或遠程幀之間插入延遲的幀
這里我們有必要重點了解一下數據幀,下面繼續介紹各種幀之間的區別。
數據幀
數據幀分為標準幀和擴展幀兩種格式;
- 基本幀格式:有11個標識符位
- 擴展幀格式:有29個標識符位
數據幀的結構具體如下所示;
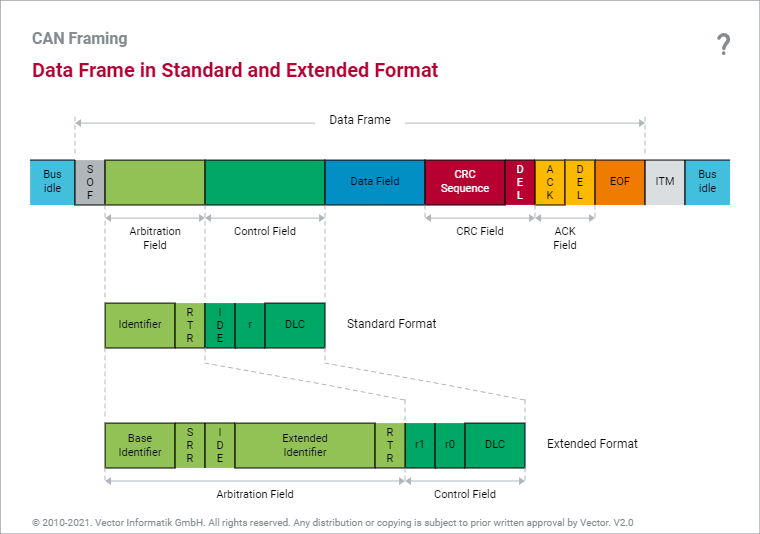 數據幀格式
數據幀格式簡單介紹一下數據幀的細節;
-
sof:start of frame,表示數據幀開始;(1 bit) -
Identifier:標準格式11 bit,擴展格式29 bit包括Base Identifier(11 bit)和Extended Identifier(18 bit),該區段標識數據幀的優先級,數值越小,優先級越高; -
RTR:遠程傳輸請求位,0時表示為數據幀,1表示為遠程幀,也就是說RTR=1時,消息幀的Data Field為空;(1 bit) -
IDE:標識符擴展位,0時表示為標準格式,1表示為擴展格式;(1 bit) -
DLC:數據長度代碼,0~8表示數據長度為0~8 Byte;(4 bit) -
Data Field:數據域;(0~8 Byte) -
CRC Sequence:校驗域,校驗算法, -
DEL:校驗域和應答域的隱性界定符;(1 bit) -
ACK:應答,確認數據是否正常接收,所謂正常接收是指不含填充錯誤、格式錯誤、 CRC 錯誤。發送節點將此位為1,接收節點正常接收數據后將此位置為0;(1 bit) -
SRR:替代遠程請求位,在擴展格式中占位用,必須為1;(1 bit) -
EOF:連續7個隱性位(1)表示幀結束;(7 bit) -
ITM:幀間空間,Intermission (ITM),又稱Interframe Space(IFS),連續3個隱性位,但它不屬于數據幀。幀間空間是用于將數據幀和遠程幀與前面的幀分離開來的幀。數據幀和遠程幀可通過插入幀間空間將本幀與前面的任何幀(數據幀、遙控幀、錯誤幀、過載幀)分開。過載幀和錯誤幀前不能插入幀間空間。
遠程幀
一般地,數據是由發送單元主動向總線上發送的,但也存在接收單元主動向發送單元請求數據的情況。遠程幀的作用就在于此,它是接收單元向發送單元請求發送數據的幀。遠程幀與數據幀的幀結構類似,如上圖X所示。遠程幀與數據幀的幀結構區別有兩點:
- 數據幀的 RTR 值為“0”,遠程幀的 RTR 值為“1”
- 遠程幀沒有數據塊
遠程幀的 DLC 塊表示請求發送單元發送的數據長度(Byte)。當總線上具有相同標識符的數據幀和遠程幀同時發送時,由于數據幀的 RTR 位是顯性的,數據幀將在仲裁中贏得總線控制權。
錯誤幀
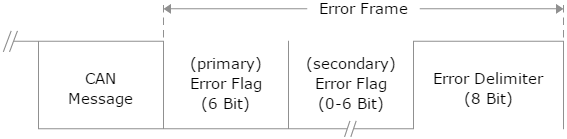
用于在接收和發送消息時檢測出錯誤時,通知錯誤的幀。錯誤幀由錯誤標志和錯誤界定符構成。錯誤幀的幀結構如圖11示。
-
錯誤標志:
個顯性/隱性重疊位
- 主動錯誤標志(6個顯性位):處于主動錯誤狀態的單元檢測出錯誤時輸出的錯誤標志
- 被動錯誤標志(6個隱性位):處于被動錯誤狀態的單元檢測出錯誤時輸出的錯誤標志
-
錯誤界定符:8 個隱性位
?
過載幀
過載幀是用于接收單元通知發送單元它尚未完成接收準備的幀。在兩種情況下,節點會發送過載幀:
- 接收單元條件的制約,要求發送節點延緩下一個數據幀或遠程幀的傳輸;
- 幀間空間(Intermission)的 3 bit 內檢測到顯性位
每個節點最多連續發送兩條過載幀。過載幀由過載標志和過載界定符(8 個隱性位)構成。數據幀的幀結構如圖12所示。
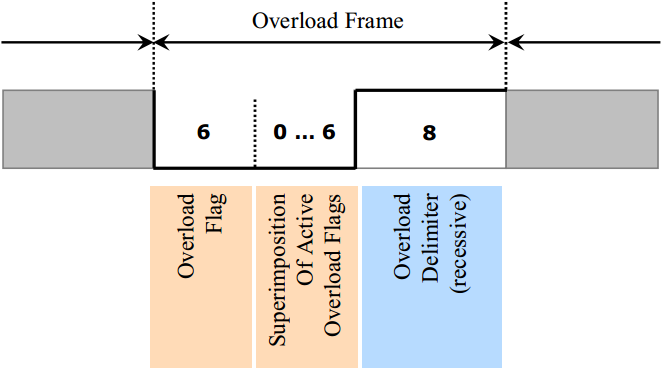 can_overload_frame
can_overload_frame這里基本把幀介紹完了,但是每個節點之間的通訊,我們如何知道這一幀開始接收了,這一幀已經接收結束了呢?下面就需要了解一下消息的時序和消息同步的方法。
消息時序以及同步
位時序
在講CAN消息時序和同步之前,我們可以對照一下UART串口的傳輸協議,他有起始位和停止位,然后大家都規定使用相同的通訊速率(波特率);
其實CAN通訊也是類似的方式,它屬于異步通訊,沒有時鐘信號線,所以所有節點之間要約定好使用相同的波特率來傳輸數據。
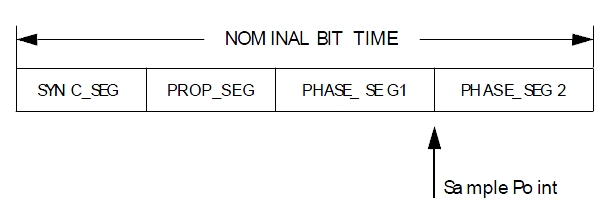
在總線空閑一段時間后,在(起始位) 進行硬同步,同步方式是將每一位劃分成多個稱為量子的時間段(time quanta),并分配一定數量的量子到位中的四個階段完成的。
這四個階段分別為:
-
SYNC_SEG:同步段,1 個時間量子長度。它用于同步各種總線節點; -
PROP_SEG:傳播段,1~8 時間量子長度。它用于補償網絡上的信號延遲。 -
PHASE_SEG_1:相位緩沖段1,1~8 時間量子長度。它用于補償邊緣相位誤差,在重新同步期間可能會延長。 -
PHASE_SEG_2:相位緩沖段2,2~8 時間量子長度。它用于補償邊緣相位誤差
具體如下圖所示;
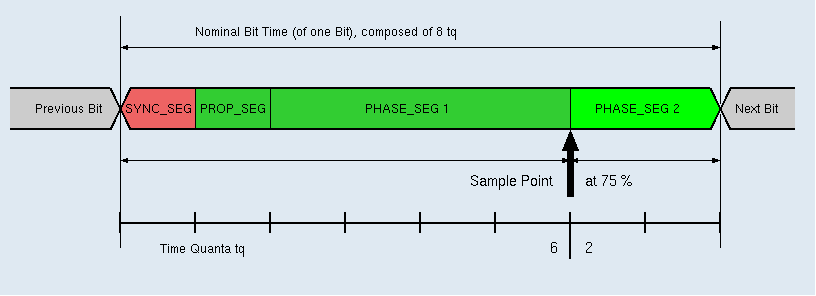 位時序
位時序波特率
如何計算波特率,需要知道每個量子時間的長度(time quanta),以及每一位需要多少個量子時間,
假設這里time quanta = 1us ,并且1 bit = 8 tq,那么上圖中的波特率就應該是:
消息過濾器
前面有提到消息在CAN總線上是廣播式的,但并不是所有節點都會對總線上所有消息感興趣。節點通過控制器中過濾碼(Filter Code )和掩碼(Mask Code),再檢驗總線上消息的標識符,來判斷是否接收該消息(Message Filtering)。
對于掩碼,“1”表示該位與本節點相關,“0”表示該位與本節點不相關。舉例如下:
例1:僅接收消息標識符為00001567(十六進制)的幀
-
設置過濾碼為
00001567 -
設置掩碼為
1FFFFFFF
節點檢測消息的標識符的所有位(29位),如果標識符為00001567接收,否則舍棄。
例2:接收消息標識符為00001567 到0000156F 的幀
-
設置過濾碼為
00001560 -
設置掩碼為
1FFFFFF0
節點檢測消息的標識符的高25位,最低的4位則不care。如果標識符最高25位相同則接收,否則舍棄。
例3:接收消息標識符為00001560 到 00001567 的幀
-
設置過濾碼為
00001560 -
設置掩碼為
1FFFFFF8
節點檢測消息的標識符的高26位,最低的3位則不care。如果標識符最高26位相同則接收,否則舍棄。
例4:接收所有消息幀幀
-
設置過濾碼為
0 -
設置掩碼為
0
節點接收總線上所有消息。
如何配置?
上面介紹了幀類型,那么如何基于MCU進行配置呢?這里以STM32F407為硬件平臺,使用HAL庫進行初始化,看一下都對哪些地方進行了配置。一般來說,我們需要配置CAN的波特率,消息過濾器等等,下面是簡單的配置的代碼;
CAN_HandleTypeDef?hCAN;
void?MX_CAN_Init(void)
{
????CAN_FilterTypeDef???sFilterConfig;
????/*CAN單元初始化*/
????hCAN.Instance?=?CAN1;??????/*?CAN外設?*/
?
????/*?BTR-BRP?波特率分頻器??定義了時間單元的時間長度42/(1+6+7)/6=500Kbps?*/
????hCAN.Init.Prescaler?=?6;
????hCAN.Init.Mode?=?CAN_MODE_NORMAL;???/*?正常工作模式?*/
????hCAN.Init.SyncJumpWidth?=?CAN_SJW_1TQ;??/*?BTR-SJW?重新同步跳躍寬度?1個時間單元?*/
????hCAN.Init.TimeSeg1?=?CAN_BS1_6TQ;???/*?BTR-TS1?時間段1?占用了6個時間單元?*/
????hCAN.Init.TimeSeg2?=?CAN_BS2_7TQ;???/*?BTR-TS1?時間段2?占用了7個時間單元?*/
????hCAN.Init.TimeTriggeredMode?=?DISABLE;??/*?MCR-TTCM??關閉時間觸發通信模式使能?*/?
????hCAN.Init.AutoBusOff?=?ENABLE;????/*?MCR-ABOM??自動離線管理?*/
????hCAN.Init.AutoWakeUp?=?ENABLE;????/*?MCR-AWUM??使用自動喚醒模式?*/
????hCAN.Init.AutoRetransmission?=?DISABLE;??/*?MCR-NART??禁止報文自動重傳???DISABLE-自動重傳?*/
????/*?MCR-RFLM??接收FIFO?鎖定模式??DISABLE-溢出時新報文會覆蓋原有報文?*/
????hCAN.Init.ReceiveFifoLocked?=?DISABLE;??
????/*?MCR-TXFP??發送FIFO優先級?DISABLE-優先級取決于報文標示符?*/
????hCAN.Init.TransmitFifoPriority?=?DISABLE;?
????if?(HAL_CAN_Init(&hCAN)?!=?HAL_OK)
????{
????????//Error_Handler();
????}
?//?初始化發送器
?hCAN1_TxMessage.IDE?=?CAN_ID_STD;
?hCAN1_TxMessage.RTR?=?CAN_RTR_DATA;
?hCAN1_TxMessage.TransmitGlobalTime?=?ENABLE;
?
?//?初始化濾波器?設置為0?則不對消息進行過濾
????hCAN1_Filter.FilterIdHigh???????????????=?0;??/*?要過濾的ID高位?*/
????hCAN1_Filter.FilterIdLow????????????????=?0;??/*?要過濾的ID低位?*/
????hCAN1_Filter.FilterMaskIdHigh??????????=?0;??/*?過濾器高16位每位必須匹配?*/
????hCAN1_Filter.FilterMaskIdLow????????????=?0;??/*?過濾器低16位每位必須匹配?*/
????hCAN1_Filter.FilterFIFOAssignment???=?CAN_FILTER_FIFO0;/*?過濾器被關聯到FIFO?0?*/
????hCAN1_Filter.FilterBank?????????????????=?0;
????hCAN1_Filter.FilterMode?????????????????=?CAN_FILTERMODE_IDMASK;?/*?工作在標識符屏蔽位模式?*/
????hCAN1_Filter.FilterScale????????????????=?CAN_FILTERSCALE_32BIT;??/*?過濾器位寬為單個32位。*/
????hCAN1_Filter.FilterActivation????????=?ENABLE;
????hCAN1_Filter.SlaveStartFilterBank???=?0;?
?
?HAL_CAN_ConfigFilter(&hCAN,?&hCAN1_Filter);
?
?while(HAL_CAN_Start(&hCAN)?!=?HAL_OK?)
?{
??printf("
CAN_Start?Failed!!");
??HAL_Delay(100);
?}
?HAL_CAN_ActivateNotification(&hCAN,?CAN_IT_RX_FIFO0_MSG_PENDING);
}
下面是CAN發送的函數,我們需要自己構建相應的消息幀格式,通常需要設置消息幀的ID格式,消息長度,具體如下;
void?CAN_TxMessage(CAN_HandleTypeDef?*hcan,uint16_t?ID?,uint8_t?aData[],?uint8_t?DLC)
{
????uint32_t?Tx_MailBox;
????/*-1-?配置數據段長度?----------------------------------------*/?
?hCAN1_TxMessage.IDE??=???CAN_ID_STD;
?hCAN1_TxMessage.RTR??=???CAN_RTR_DATA;
?hCAN1_TxMessage.StdId?=???ID;
????hCAN1_TxMessage.DLC?????=????DLC;??
?hCAN1_TxMessage.TransmitGlobalTime?=?ENABLE;
????/*-2-?發送aData?---------------------------------------------*/
????while(HAL_CAN_AddTxMessage(hcan,?&hCAN1_TxMessage,?aData,?&Tx_MailBox)?!=?HAL_OK)
????{
????????HAL_Delay(5);
????}
}
上述代碼設置發送消息:
-
CAN_ID_STD設置為標準ID; -
CAN_RTR_DATA設置消息為數據幀; -
StdId為當前消息的ID; -
DLC為當前消息的長度;
整體可以參考前面介紹的消息幀格式,篇幅有限,這里就先簡單的介紹一下。
總結
本文對CAN總結進行了簡單的介紹,CAN通訊的特點可以總結如下;
- 符合OSI開放式通信系統參考模型;
- 兩線式總線結構,電氣信號為差分式;
- 多主控制。在總線空閑時,所有的單元都可開始發送消息,最先訪問總線的單元可獲得發送權;多個單元同時開始發送時,發送高優先級 ID 消息的單元可獲得發送權;
- 消息報文不包含源地址或者目標地址,僅通過標識符表明消息功能和優先級;
- 基于固定消息格式的廣播式總線系統,短幀結構;
- 事件觸發型。只有當有消息要發送時,節點才向總線上廣播消息;
- 可以通過發送遠程幀請求其它節點發送數據;
- 消息數據長度 0~8 Byte;
- 錯誤檢測功能。所有節點均可檢測錯誤,檢測處錯誤的單元會立即通知其它所有單元;
- 發送消息出錯后,節點會自動重發;
- 故障限制。節點控制器可以判斷錯誤是暫時的數據錯誤還是持續性錯誤,當總線上發生持續數據錯誤時,控制器可將節點從總線上隔離;
- 通信介質可采用雙絞線、同軸電纜和光導纖維,一般使用最便宜的雙絞線;
- 理論上,CAN總線用單根信號線就可以通信,但還是配備了第二根導線,第二根導線與第一根導線信號為差分關系,可以有效抑制電磁干擾;
- 在40米線纜條件下,最高數據傳輸速率 1Mbps;
- 總線上可同時連接多個節點,可連接節點總數理論上是沒有限制的,但實際可連接節點數受總線上時間延遲及電氣負載的限制;

























 工商網監
工商網監
評論