 電子發燒友App
電子發燒友App


在平時應用時KUKA機器人,鉚接設備,激光焊等設備大量使用了EtherCAT通訊,下面我們就來介紹一下它.
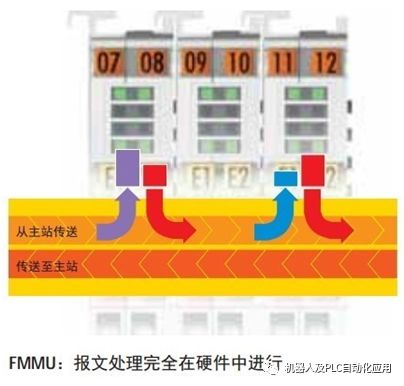
1.EtherCAT協議處理完全在硬件中進行
協議ASIC 可靈活配置。過程接口可從1 位擴展到64 kbyte。
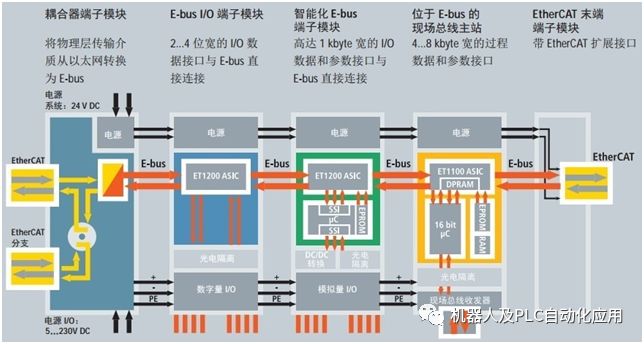
符合IEEE 802.3 標準的以太網協議無需附加任何總線即可訪問各個設備。耦合設備中的物理層由100BASE-TX 或–FX 轉換為E-bus,以滿足電子端子排等模塊化設備的需求。端子排內的E-bus 信號類型(LVDS)并不是專用的,它還可用于 10 Gbit 以太網。在端子排末端,物理總線特性被轉換回100BASE-TX 標準。?
主板集成的以太網MAC 足以作為主站設備中的硬件使用。DMA(直接存儲器存取)用于將數據傳輸到主內存,解除了 CPU 存取網絡數據的負擔。Beckhoff 的多端口插卡中運用了相同的原理,它在一個PCI 插槽中最多捆綁了4 個以太網通道。
2. EtherCAT的性能
EtherCAT 使網絡性能達到了一個新境界。
1000 個I/O 的更新時間只需30 μs,其中還包括I/O 周期時間。單個以太網幀最多可進行1486 字節的過程數據交換,幾乎相當于12000 個數字輸入和輸出,而傳送這些數據耗時僅為300 μs。
與100 個伺服軸的通訊每100 μs 執行一次。可在這一周期時間內更新帶有命令值和控制數據的所有軸的實際位置及狀態,分布式時鐘技術使軸的同步偏差小于1 微秒。
超高性能的EtherCAT 技術可以實現傳統的現場總線系統無法迄及的控制理念。
這樣,通過總線也可以形成超高速控制回路。以前需要本地專用硬件支持的功能現在可在軟件中加以映射。巨大的帶寬資源使得狀態數據能夠與任何數據并行傳輸。EtherCAT 使通訊技術和現代工業PC 所具有的超強計算能力相適應,總線系統不再是控制理念的瓶頸,分布式I/O 可能比大多數本地I/O 接口運行速度更快。
這種網絡性能優勢在具有相對中等運算能力的小型控制器中較為明顯。EtherCAT周期時間如此之短,使得它可以在兩個控制周期之間完成。因此,控制器總是能夠獲取最新的輸入數據;輸出以最小的延遲尋址。無需增強本身的運算能力,控制器的響應行為就能夠得到顯著改善。
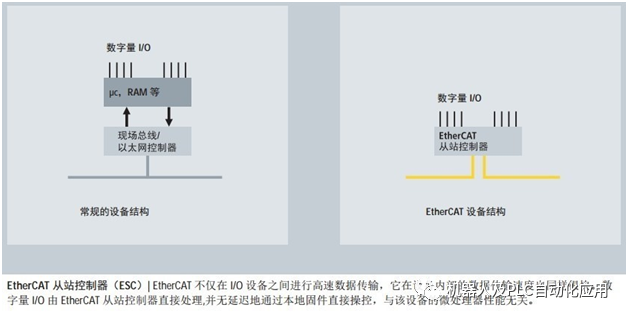
借助于從站硬件集成和網絡控制器主站的直接內存存取,整個協議的處理過程都在硬件中得以實現,因此,完全獨立于協議堆棧的實時運行系統、CPU 性能或軟件實現方式。
1000個I/O的更新時間只需30 μs,其中還包括I/O周期時間。
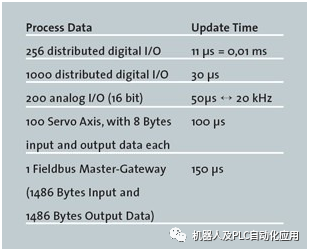
單個以太網幀最多可進行1486字節的過程數據交換,幾乎相當于12000個數字輸入和輸出,而傳送這些數據耗時僅為300 μs。
100個伺服軸的通訊也非常快速:可在每100μs中更新帶有命令值和控制數據的所有軸的實際位置及狀態,分布時鐘技術使軸的同步偏差小于1微秒。而即使是在保證這種性能的情況下,帶寬仍足以實現異步通訊,如TCP/IP、下載參數或上載診斷數據。
超高性能的EtherCAT技術可以實現傳統的現場總線系統無法迄及的控制理念。EtherCAT使通訊技術和現代工業PC所具有的超強計算能力相適應,總線系統不再是控制理念的瓶頸,分布式I/O可能比大多數本地I/O接口運行速度更快。EtherCAT技術原理具有可塑性,并不束縛于100 M bps的通訊速率,甚至有可能擴展為1000M bps的以太網。?
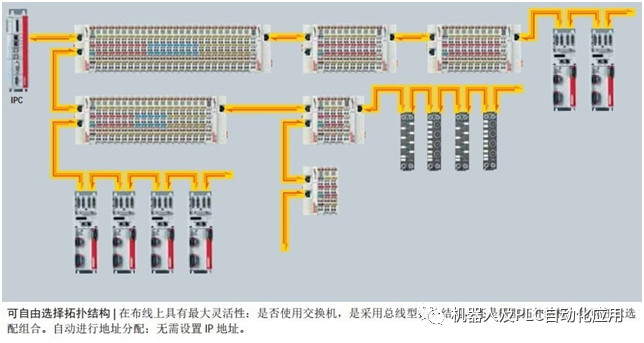
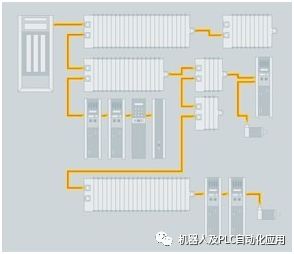
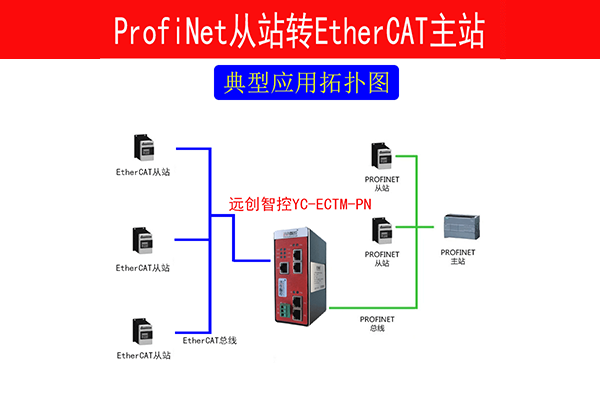
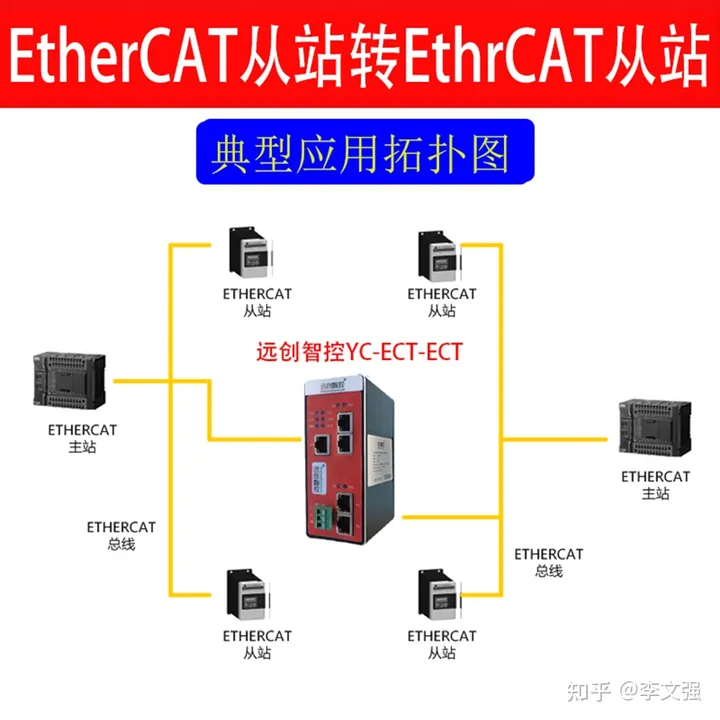
3. EtherCAT的拓撲
總線形、樹形或星型:EtherCAT支持幾乎任何類型的拓撲結構。
因此,由于現場總線而得名的總線結構或線型結構也可用于以太網,并且不受限于級聯交換機或集線器的數量。
最有效的系統連線方法是對線型、分支或樹叉結構進行拓撲組合。因為所需接口在I/O 模塊等很多設備中都已存在,所以無需附加交換機。
當然,仍然可以使用傳統的、基于以太網的星型拓撲結構。
還可以選擇不同的電纜以提升連線的靈活性:靈活、經濟的標準超五類以太網電纜可采用100BASE-TX 模式傳送信號,兩臺設備之間的最大電纜長度為100 m。
還可通過交換機或介質轉換器實現不同以太網連線(如不同的光纖和銅電纜)的完整組合。?
信號變量可以根據每個電纜間距單獨選擇。由于連接的設備數量可高達65535,因此,網絡的容量幾乎沒有限制。
EtherCAT使用全雙工的以太網實體層,從站可能有二個或二個以上的埠。若設備沒偵測到其下游有其他設備,從站的控制器會自動關閉對應的埠并回傳以太網幀。由于上述的特性,EtherCAT幾乎支援所有的網絡拓撲,包括總線式、樹狀或是星狀,現場總線常用的總線式拓撲也可以用在以太網中。
EtherCAT的拓撲可以用網絡線、分枝或是短線(stub)作任意的組合。有三個或三個以上以太網接口的設備就可以當作分接器,不一定一定要用網絡交換器。由于使用100BASE-TX的以太網物理層,二個設備之間的距離可以到100米,一個EtherCAT區段的網絡最多可以有65535個設備。若EtherCAT網絡是使用環狀拓撲(主站設備需要有二個通訊埠),則此網絡還有纜線冗余的機能。
4. EtherCAT支持熱連接
許多應用都需要在運行過程中改變I/O組態。例如,需求不斷變化的加工中心、裝備傳感器的刀具系統或智能化的傳輸系統、靈活的工件執行機構或可單獨關閉印刷單元的印刷機等。EtherCAT系統的協議結構中已經考慮到了這些需求:熱連接功能可以將網絡的各個部分連在一起或斷開,或“飛速”進行重新組態,針對不斷變化的組態提供靈活的響應能力。
5. EtherCAT的安全性:Safety over EtherCAT
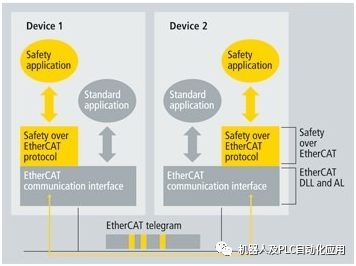
EtherCAT有一個加強的協定版本,稱為Safety over EtherCAT,可以在同一個網絡上進行安全相關的通訊和一般的控制通訊。此安全通訊是以EtherCAT的應用層為基礎,不會影響底層的通訊協定。Safety over EtherCAT有通過IEC 61508的認證,符合安全完整性等級(SIL)3的要求。
為了實現EtherCAT 安全數據通訊,我們開放了Safetyover EtherCAT 協議,EtherCAT安全通信協議已經在ETG組織內部公開。該協議已經由德國技術監督局(TüV)鑒定為符合IEC61508 定義的SIL3 等級要求。設備上實施EtherCAT安全協議必須滿足安全目標的需求。相應的產品相關要求也必須考慮進來。
EtherCAT被用作傳輸安全和非安全數據的單一通道。傳輸介質被認為是“黑色通道”而不被包括在安全協議中。
EtherCAT過程數據中的安全數據報文包括安全過程數據和所要求的數據備份。這個“容器”在設備的應用層被安全地解析。通信仍然是單一通道的。這符合IEC61784-3附件中的模型A。因此,該安全協議也可通過其它通訊系統、背板或WLAN 傳輸。傳輸周期可根據要求縮短,不會影響殘留誤差率。Safety over EtherCAT 主站和從站之間的安全數據循環交換被稱作為由看門狗定時器監控的連接。一個主站能建立并監控多個不同從站的連接。
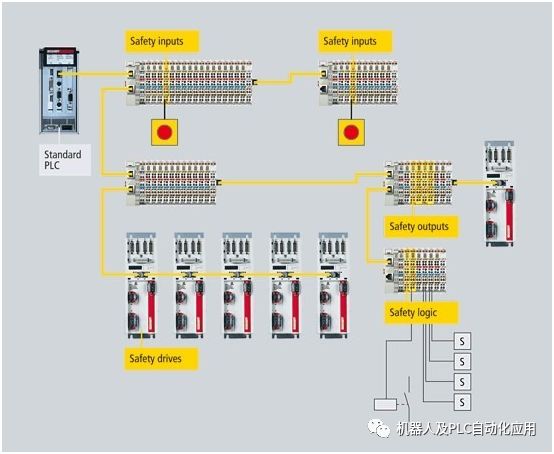
安全元件在自動化系統中所需要的任意地方都可以使用。系統中可以使用不同規模的本地輸入和輸出元件。可以根據需求使用安全或非安全總線端子擴展額外的輸入和輸出。安全邏輯也嵌入到網絡當中。這樣不用安全擴展的標準 PLC可以繼續處理控制任務。安全輸入和輸出功能需要的本地安全邏輯由智能化的安全總線端子實現。這節約了昂貴的安全PLC所帶來的成本,并可以根據當前任務隨意裁剪邏輯功能。只有安全EtherCAT主站和所分配的安全從站通過非安全的標準PLC路由。
§?本協議在安全數據長度,通信介質或波特率方面沒有限制。
§?EtherCAT被用作“黑色通道”,即,通信系統在安全處理中沒有任何作用。
§?協議被鑒定符合IEC61508定義的SIL3等級
§?提供EtherCAT安全功能的產品已經于2005年就上市了。
6. EtherCAT的診斷
現場總線系統的實際應用經驗表明,有效性和試運行時間關鍵取決于診斷能力。只有快速而準確地檢測出故障,并明確標明其所在位置,才能快速排除故障。因此,在EtherCAT的研發過程中,特別注重強化診斷特征。
網絡的診斷能力對于提高網絡可靠性和縮短調試時間 — 從而降低總成本 — 來說至關重要。只有快速而準確地檢測出故障,并明確標明其所在位置,才能快速排除故障。因此,在EtherCAT 的研發過程中,特別注重強化診斷功能。?
試運行期間,驅動或I/O 端子等節點的實際配置需要與指定的配置進行匹配性檢查,拓撲結構也需要與配置相匹配。
由于整合的拓撲識別過程已延伸至各個端子,因此,這種檢查不僅可以在系統啟動期間進行,也可以在網絡自動讀取時進行(配置上載)。?
數據傳輸過程中出現的位故障可以通過評估每臺設備上的CRC 校驗進行檢測——32 位CRC多項式的最小漢明距為4。除斷點檢測和定位之外,EtherCAT系統的協議、物理層和拓撲結構還可以對各個傳輸段分別進行品質監視,與錯誤計數器關聯的自動評估還可以對關鍵的網絡段進行精確定位。此外,對于電磁干擾、連接器破損或電纜損壞等一些漸變或突變的錯誤源而言,即便它們尚未過度應變到網絡自恢復能力的范圍,也可對其進行檢測與定位。
審核編輯:劉清




















 工商網監
工商網監
評論