 電子發燒友App
電子發燒友App


?
嵌入式可配置操作系統eCos(Embedded Configureable Operating System)的特點是可配置性、可裁減性、可移植性和實時性。它的一個主要技術特色就是功能強大的配置系統,可以在源碼級實現對系統的配置和裁減。與Linux的配置和裁減相比,eCos的配置方法更清晰、更方便;且系統層次也比Linux清晰明了,移植和增加驅動模塊更加容易。正是由于這些特性,eCos引起了越來越多的關注,同時也吸引越來越多的廠家使用eCos開發其新一代嵌入式產品。
eCos現在由Red Hat維護,可支持的處理器包括:ARM、StrongARM、XScale、SuperH、Intel X86、PowerPC、MIPS、AM3X、Motorola 68/Coldfire、SPARC、Hitachi H8/300H和NEC V850等。
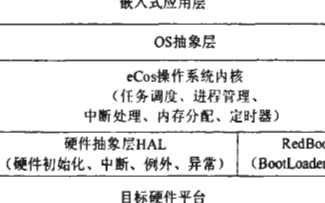
1 eCos的層次結構
eCos采用模塊化設計,由不同的功能組件構成,eCos系統的層次結構如圖1所示。
這種層次結構的最底層是硬件抽象層(Hardware Abstraction Layer),簡稱為HAL,它負責對目標系統硬件平臺進行操作和控制,包括對中斷和例外的處理,為上層軟件提供硬件操作接口。只需提供新硬件的抽象層,就可以將整個eCos系統包括基于eCos的應用移植到新的硬件平臺上。
2 構建eCos系統
構建eCos系統首先要搭建自己的硬件抽象層,然后創建驅動程序,之后就可以編制應用程序了。
3 硬件抽象層的移植
硬件抽象層分為三個不同的子模塊:體系結構抽象層(Architecture HAL)、變體抽象層(Variant HAL)和平臺抽象層(Platform HAL)。
體系結構抽象層。eCos所支持的不同處理器系列具有不同的體系結構,如ARM系列、PowerPC系列、MIPS系列等。體系結構抽象層對CPU的基本結構進行抽象和定義,此外它還包括中斷的交付處理、上下文切換、CPU啟動以及該類處理器結構的指令系統等。
變體抽象層指的是處理器在該處理器系列中所具有的特殊性,這些特殊性包括Cache、MMU、FPU等。eCos的變體抽象層就是對這些特殊性進行抽象和封裝。
平臺抽象層是對當前系統的硬件平臺進行抽象,包括平臺的啟動、芯片選擇和配置、定時設備、I/O寄存器訪問以及中斷寄存器等。
硬件抽象層的這三個子模塊之間沒有明顯的界線。對于不同的目標平臺,這種區分具有一定的模糊性。例如,MMU和Cache可能在某個平臺上屬于體系結構抽象層,而在另一個平臺上則可能屬于變體抽象層的范圍;再比如,內存和中斷控制器可能是一種片內設備而屬于變體抽象層,也可能是片外設備而屬于平臺抽象層。
eCos的移植通過這三個子模塊來完成,即平臺抽象層的移植、變體抽象層的移植和體系結構抽象層的移植。對一個新的體系結構來說,其系統結構抽象層的建立相對來說比較困難。eCos支持大部分當前廣泛使用的嵌入式CPU,已具有了支持各種體系結構的硬件抽象層。因此,eCos的移植很少需要進行體系結構抽象層的編寫。
4 平臺抽象層的移植
一般來說,進行eCos開發時,移植的主要工作在于平臺抽象層,這是由于eCos已實現了絕大多數流行嵌入式CPU的體系結構抽象層和變體抽象層。平臺抽象層主要完成的工作包括:內存的布局、平臺早期初始化、中斷控制器以及簡單串口驅動程序等。
構建一個新的平臺系統,最簡單的方法是利用eCos源碼提供的具有相同體系結構和CPU型號的參考平臺硬件抽象層,將其作為模板,復制并修改所有與新平臺相關的文件。若eCos沒有這樣的平臺,則可用另一種體系結構或CPU型號的類似硬件抽象層作為模板。比如,eCos提供了以三星公司ARM CPU S3C4510b為核心的平臺SNDS4110,當需要移植eCos到ARM CPU S3C44B0上時,這將是一個很好的起點。
移植工作最好是從RedBoot開始,實現的第一個目標是使RedBoot運行在新平臺上。RedBoot是eCos自帶的啟動代碼,它比eCos要簡單,沒有使用中斷和線程機制,但包含了大部分最基本的功能。
建立目標平臺的RedBoot通常按以下步驟進行(以構建S3C44b0的新平臺為例)。
① 復制eCos源碼中選定的參考平臺,根據需要對目錄及文件更名。更名的主要內容有:新平臺的目錄名、組件定義文件(CDL)、內存布局文件(MLT)、平臺初始化的源文件和頭文件
② 調整組件定義文件(CDL)選項。包括選項的名字、實時時鐘/計數器、CYGHWR_MEMORY_LAYOUT 變量、串口參數以及其他的一些選項。
③ 在頂層ecos.db文件中加入所需要的包,并增加對目標平臺的描述。在最初,該目標平臺的入口可以只包含硬件抽象層包,其他硬件支持包以后再加入。經過修改后,就可在eCos配置程序中選擇新的平臺進行配置。
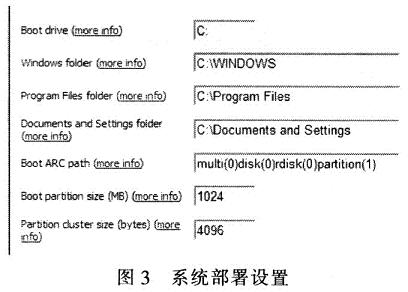
④ 修改include/pkgconf中的內存布局(MLT)文件。按照新的硬件平臺內存布局修改MLT文件。MLT文件對應每種啟動類型有三個不同后綴的文件:.h文件以及.ldi文件和mlt文件。手工修改時只需修改.h文件和.ldi文件,并保證兩個文件同步修改。修改的主要內容有ROM的起始地址、ROM的大小、RAM的起始地址和RAM的大小。
⑤ 修改平臺的io宏定義。在include/plt_io.h文件中完成對平臺的各種IO宏定義,包括各種CPU的系統配置寄存器、內存配置寄存器、串口配置寄存器、LCD配置寄存器、以太網配置寄存器等的I/O地址。
⑥ 修改平臺的Cache代碼。在include/hal_cache.h文件中修改有關Cache的宏定義。在開發初期,最好先將Cache關閉,等移植穩定后再打開。
⑦ 實現簡單的串口驅動程序。串口的初始化、接收和發送在src/hal_diag.c文件完成。主要的函數如下:
cyg_hal_plf_serial_init_channel(),完成對某個串口的具體初始化工作;
cyg_hal_plf_serial_putc(),從串口發送一個字符;
cyg_hal_plf_serial_getc(),從串口接收一個字符;
cyg_hal_plf_serial_getc_nonblock(),以無阻塞的方式接收一個字符,即緩沖區中無數據時立即返回;
cyg_hal_plf_serial_isr(),串口中斷服務程序;
cyg_hal_plf_serial_init(),調用cyg_hal_plf_serial_init_channel()函數初始化各串口,并向內核注冊串口中斷服務程序、串口的讀寫例程和配置例程。
⑧ 修改或增加平臺初始化程序。平臺初始化在3個文件文件中完成:src/s3c44b0_misc.c、include/hal_platform_setup.h和include/hal_platform_ints.h。
hal_platform_ints.h完成系統的中斷宏定義。在不同的平臺中設備數量和類型不同,中斷的譯碼方式也不一致,需要根據具體情況作出調整。
hal_platform_setup.h主要完成系統硬件的初步配置,這里一般要在看門狗和中斷關閉后,配置系統時鐘頻率、ROM和RAM的初始化參數。
s3c44b0_misc.c文件完成目標板的進一步初始化、中斷處理、延時例程和操作系統時鐘設置。
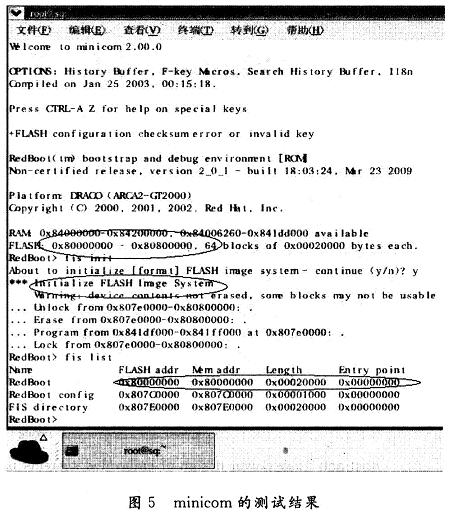
經過以上修改,底層的平臺抽象層就基本完成了,這時可用eCos的配置工具生成RedBoot進行測試。
RedBoot測試成功后,說明平臺已經能正確完成初始化操作,且串口驅動也能正常工作,接著要完成中斷和Cache等測試工作。可利用一些多線程的小程序測試,檢測時鐘配置是否正確,同時也檢測了中斷能否正常工作。
5 驅動程序設計
平臺抽象層完成后,接著要完成系統的設備驅動程序。eCos設備驅動程序的中斷模塊分為三個層次:中斷服務程序ISR、中斷滯后服務程序DSR和中斷線程。ISR在響應中斷時立即調用,DSR由ISR發出調用請求后調用,而中斷線程為驅動程序的客戶程序。
硬件中斷在最短的時間內交付給ISR處理。硬件抽象層對硬件中斷源進行譯碼并調用對應的中斷ISR。ISR可以對硬件進行簡單的操作,應使ISR的處理時間盡量短。當ISR返回時,它可將自己的中斷滯后服務程序DSR放入操作系統的任務調度中,DSR可以在不妨礙調度器正常工作時安全運行。大多數情況下,DSR將在ISR執行完成后立即運行。
eCos設備驅動程序一般可分為三個部分,如圖2所示。
eCos的所用設備驅動程序都使用設備表入口來描述。使用宏DEVTAB_ENTRY()可生成設備表入口。其格式為:
DEVTAB_ENTRY(l, name, dep_name, handlers, init, lookup, priv)。
l:設備表入口的“C”標識符。
name:該設備的“C”字符串名字,在搜索設備時用到。
dep_name:對于一個層次設備,此參數是該設備下層設備的“C”字符串名字。
handlers:I/O函數句柄指針,由宏DEVIO_TABLE實現的。
init:當eCos處于初始化階段時被調用的函數,該函數可以進行查找設備,對硬件進行設置等操作。
lookup:當調用cyg_io_lookup()函數對該設備進行操作時調用的函數。
priv:該設備驅動程序所需的專用數據。
設備入口中的句柄handlers包含了一組設備驅動程序接口函數,是設備函數表DEVIO_TAB的指針,DEVIO_TAB包含了一組函數的指針。設備I/O函數表通過DEVIO_TAB宏來定義,格式如下:
DEVIO_TABLE(l, write, read, get_config, set_config)。
l:改表的“C”標識符,即在DEVTAB_ENTRY中的handlers。
write:實現向設備傳送數據。
read:實現從設備讀取數據。
get_config:實現讀取設備配置信息。
set_config:實現對設備的配置操作。
在eCos的初始化引導過程中,對系統中的所有設備調用其相應的init()函數(即DEVTAB_ENTRY宏注冊的初始化函數),所有對設備的I/O操作通過handlers完成。
設備驅動程序包含如下內容(xxx:表示某種設備)。
◆ 用宏定義DEVIO_TABLE設備I/O函數表。
DEVIO_TABLE(xxx_handlers, // I/O函數句柄指針
xxx_write, // 寫函數
xxx_read, // 讀函數
xxx_get_config, // 讀配置
xxx_set_config)// 設置配置
◆ 用宏定義DEVTAB_ENTRY注冊設備入口。
DEVTAB_ENTRY(xxx_device, // 設備入口名
“/dev/xxx”, // 設備名,查找設備時用到
NULL,// 需用到的底層驅動,這里為空
xxx_handles, // I/O函數句柄指針
xxx_init, // 設備初始化函數
xxx_lookup, // 設備搜索
xxx_priv)// 設備專用數據指針
◆ 完成初始化函數xxx_init。完成對硬件的初始化,調用函數cyg_drv_interrupt_create建立中斷對象,然后調用函數cyg_drv_interrupt_attach完成中斷與硬件向量的連接。
◆ 完成中斷服務程序。
◆ 完成中斷滯后服務程序。
◆ 若有中斷線程,則完成中斷線程。
◆ 完成設備搜索函數xxx_lookup。
◆ 完成寫函數xxx_write。
◆ 完成讀函數xxx_read。
◆ 完成讀配置函數x xx_get_config。
◆ 完成設置配置函數xxx_set_config。
結論
經過硬件平臺的移植和驅動程序的編寫,就可在此基礎上開發各種應用程序了。
eCos具有非常優秀的可移植性;使用多任務搶占機制,具有最小的中斷延遲;支持嵌入式系統所需的所有同步原語,提供包括設備驅動程序、內存管理、例外處理、標準C和數學庫;提供各種開發嵌入式應用所需的工具,是開發嵌入式系統的強有力工具。









 工商網監
工商網監
評論