 利用EOG信號實現人腦和計算機交互的應用方案
利用EOG信號實現人腦和計算機交互的應用方案
1 引言
活的細胞、組織或器官興奮時,不論其外部表現如何不同,都伴隨著有電的變化,這也是人體電信號產生的原因。這些電信號可以通過儀器記錄下來并進行分析,可以獲得重要的信息。到目前為止,腦電、心電等都已經廣泛地應用與醫學和科研中。同樣,在眼球運動的過程中,會產生可測量的電位變化,稱為眼電 (electro-oculogram,簡稱EOG)。對眼電信號進行放大濾波并進行分析,可以得到眼球運動的軌跡。利用這一原理,就可以利用眼球的運動對計算機界面直接進行操作,實現人腦和計算機的交互。在此,我們設計了一套利用EOG信號實現對計算機的實時控制系統,對EOG信號進行放大和消躁處理后,對其中的眼動軌跡相關信息進行抽提和分析,用以對計算機進行控制。這一系統代替了傳統的鼠標等外接設備進行人機交互的方式,有著很強的新穎性。
2 工作原理
在臨床中,眼電(electro -oculogram,EOG)記錄是應用最為廣泛的一種技術。而近幾年來,在腦機界面(BCI,Brian computer interface)研究領域中,EOG由于其成本低廉,信號穩定,實用性強以及非侵入性而越來越受到廣泛關注。接下來介紹一下系統的原理:
眼球運動:人類視覺系統的最前端,就是人的眼球。人的眼球是一個結構復雜,設計巧妙的光學成像系統。如圖1 所示。外界的圖像通過角膜,虹膜,晶狀體,玻璃體等一系列結構的反復折射,最終在視網膜上形成縮小、倒立的影像。眼部運動的目的是讓物體的影像落在視網膜成像最清晰的區域。這意味這眼球要能夠任意調整位置,對準目標物。眼球的運動是由6組肌肉控制的,這6組肌肉受到第三,第四和第六腦神經的支配。這些肌肉成對配合,分別控制水平,垂直以及環行移動。結構如圖2。
眼球運動可以分為下面幾種類型:
1. 掃視(Saccadic): 快速的眼球運動,將視覺的焦點從一點馬上移到另外一點。
2. 平滑移動(Smooth Pursuit):眼球隨著位置緩慢變化的物體平滑地移動
3. 補償移動(Compensatory movements):為了使得頭部以及身體移動過程中視覺焦點相對固定而進行的無意識的補償運動。
4. 趨異運動(Vergence):兩只眼球為了保持立體視覺而產生的移動。
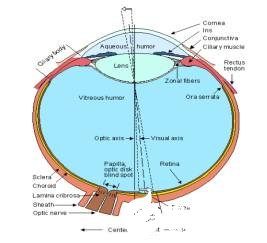
圖1:眼球結構圖
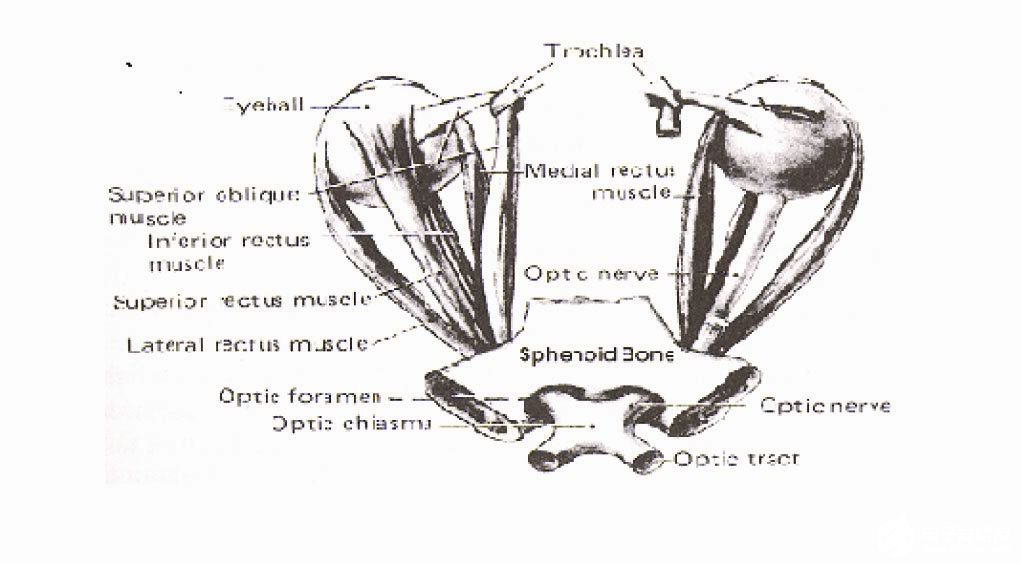
圖2:眼部6組肌肉的示意圖
EOG 信號的產生:眼球前部的角膜在電學特性上是正性的,而視網膜是負性的。根據這一特點,我們可以把眼球看作一個雙極子。當將電極放置于皮膚上的時候,眼球這一雙極子因為運動而造成的電位變化就可以被測量出來。如果被試向前方直視,我們可以記錄到一條穩定的基線。當眼球移動的時候,電位的變化和眼球移動的方向以及角度成線性關系變化。EOG可以用來監測距離中央點70度以內眼球的移動,精確度可以達到2度。圖3當眼球分別向右移動30度和向左移動15度時其電位的變化。
圖3:EOG信號變化圖
EOG 的測量方法:為了測量眼球的電位,要將電極放置在眼睛周圍的皮膚上。為了降低偏移以及獲得合適的電阻,在放置電極之前需要用對皮膚進行清潔。然后,根據不同方向的測量,將帶有導電膏的Ag-Agcl皮膚電極貼上。為了測量水平方向上的運動,通常將電極分別放置在眼球的左右兩側的皮膚上,而豎直方向的運動則是通過將電極放置在眼球上下兩側。前額上放置一枚電極作為Ground。如圖4所示。
圖 4:EOG電極放置示意圖
EOG 信號具有以下一些優點:首先,EOG是各種生物電信號中最容易測量的。其次,其信號幅度較強(15~200uv),而且在頭部位置相對固定的情況下,其干擾也很小。同時,由于其有用信號與各種噪音的頻率分布相差較遠,可通過簡單的濾波方法將噪音消除。最后,信號和眼球運動呈線性關系,易于分析。
3 系統設計及實現
整個系統分成兩個部分,數據采集端(簡稱采集端)和數據接收模塊(簡稱接收端),兩個模塊之間通過義統27M無線通訊模塊進行連接和通訊。采集端用于采集人體EOG信號和加速傳感器信號,并進行處理和計算,將數據打包發送給接收端,接收端則負責和PC進行交互,將數據轉換成為PC可以識別的鼠標指令,通過串口傳給PC,以完成對PC的控制。系統的整體結構如圖5所示。
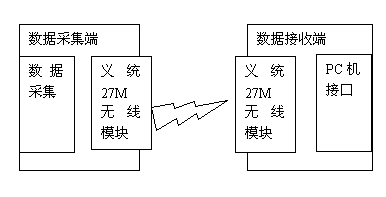
圖5:系統整體框圖
系統有兩種工作狀態,通過開發板上的按鍵控制選擇。一種狀態是正常工作狀態,在這個狀態下,鼠標的上下左右由眼睛控制,頭部向左側偏轉一下代表一次左擊,向右側偏轉一下代表由擊,頭部向左側偏轉并停留一段時間代表雙擊。另外一種狀態是輔助調節狀態,這種狀態下除了包括正常工作狀態下的功能之外,還打開了另外一個加速傳感器模塊,這個時候這個加速傳感器模塊的前后左右運動同樣可以對鼠標進行控制。
采集端使用周立功公司的arm2131開發板來實現,自行設計了外圍的接口電路和各個采集模塊。數據采集端主要實現的功能包括:加速傳感器數據采集,EOG信號采集和無線傳輸。采集端的外觀圖如圖6所示。
圖6:數據采集端外觀圖
EOG電路用于實現眼電信號的采集。該電路共分三級放大,最后加上一級電位調節:第一級放大電路放在倍數為3倍。其中的三個電阻取值相等。第二級放大電路為差分放大電路。可將兩輸入信號差分放大,這個倍數取決于我們所加的電阻值。第三級放大電路為可調放大電路。在第二級和第三級中間增加了一個二階有源底通濾波器,慮除不需要的高頻信號和噪聲。集成運放的芯片選用的TI公司的tlv2264芯片。模塊的原理圖如圖7所示。
圖7:EOG模塊電路原理圖
加速傳感器模塊中使用的芯片是Freescale公司的MMA7260Q。該芯片可以測量水平兩個方向和垂直方向的加速度,具有較高的精確度和響應速度。模塊的原理圖如圖8所示。
圖8:加速模塊電路原理圖
無線通訊模塊我們使用了義統的27M無線通訊模塊進行連接。數據包的格式如圖9所示,首先需要連續的發送10次hi/lo當做前導波形,該前導波用于調整無線模塊的狀態,接著發送起始波形Start 600 uS Hi / 600 uS LO / 600 uS Hi / 400 uS LO,最后是數據,hi / lo 都為 200uS。數據區每四個字節進行一下LoHi的同步,保證無線傳輸的可靠同步。
圖9 無線通訊數據包
采集端最終的pcb版圖如圖10所示。包括一個電源電路模塊、一個接口電路模塊,兩個加速度傳感器電路模塊和一個EOG電路模塊。
圖10 采集端pcb版圖
在軟件設計方面,采集端和接收端均采用多任務設計,在uCOS操作系統上完成開發。采集端共包括三個進程:主進程,負責檢測鍵輸入和切換狀態,并控制指示燈顯示;加速傳感器監控進程,負責檢測兩個加速傳感器模塊的輸入變換;EOG輸入檢測進程,負責檢測EOG模塊的輸入信號。接收端則負責完成串口的初始化,在PC端執行硬件刷新時將自己識別成鼠標設備,并負責將接收到的控制數據按照串口鼠標的數據格式打包,通過串口發送給PC,從而對PC進行控制。
4 小結
本系統是以EOG為理論基礎,使用信號采集電路對眼睛周圍的表皮電信號進行采集,是對EOG理論的探索和實踐,有很強的新穎性,在醫學領域、家庭應用領域、甚至在工業和軍事領域都有著潛在的應用價值。當然,系統還有很多需要改進的地方,例如在信號精度、去噪設計、穩定性和適應性設計、易用性方面還有很多改進的空間。
責任編輯:gt
-
人機交互
+關注
關注
12文章
1207瀏覽量
55408 -
控制系統
+關注
關注
41文章
6623瀏覽量
110627 -
計算機
+關注
關注
19文章
7500瀏覽量
88018
發布評論請先 登錄
相關推薦
計算機真的能像人腦一樣思考 關鍵在神經網絡
如何利用VB實現計算機與單片機的串口通信
計算機的組成原理是什么?
計算機實現的控制算法設計
基于OpenCV的計算機視覺技術實現
IBM發布基于人腦的全新計算機架構
IBM計劃開發模擬人腦的計算機
人腦為什么如此高效與計算機相比究竟誰的問題解決能力比較強呢?
全國計算機等級考試二級教程的詳細資料說明





 工商網監
工商網監
評論