。第六章主要對整個系統鏈路指標進行了分析,其中包括接受靈敏度和發射功率等,進一步說明了 77GHz 車載雷達系統的可行性,并對射頻前端電路進行了加工和測試,為后續工作積累經驗。ADAS視覺方案及11家創業
2020-06-04 15:15:44
、判斷和檢測生產線上的各種產品,保證產品的質量和一致性。與傳統的視覺檢測方法相比,工業AI視覺檢測系統具有如下幾個顯著優點:
1.高效性:工業AI視覺檢測系統可以實現自動化檢測,大大提高了生產效率
2023-06-15 16:21:56
我司提供行人檢測/人體檢測/人體抓拍海思解決方案,同時還有ARM行人檢測攝像機方案。人體檢測自動識別攝像機基于視頻圖像智能分析技術原理研制,采用公司自主研發的人體輪廓識別技術,綜合識別人體頭部、肩部
2018-06-14 11:29:46
由于最近的項目遇到LabVIEW視覺檢測的。在網上找了很久的資料,很少。有哪位大神可以幫我看看我這LED最后處理和識別好壞。
2017-05-17 20:08:54
LabVIEW視覺檢測怎么對點陣的LCD屏進行檢測如1602顯示屏。只檢測顯示的圖案缺陷,我使用匹配模式怎么差別那么大,好明顯的都檢測不出來。對于這種點整的LCD屏一般都使用什么方法來檢測
2017-08-22 09:13:49
MATLAB的行人目標檢測的方法有哪些,就是主要的方法,基于背景的,基于目標的,還有其他的。都有哪些?
2023-08-23 16:30:20
網上的教程都是在人臉上加個框框,進行人臉識別,而不是進行人臉檢測。請問有誰嘗試過和face++進行交互,能夠識別攝像頭前的人是預存的人,嗯,類似于人臉開密碼箱那種的。但是又想加上一部檢測到運行拍照發郵件那個?
2020-06-10 09:28:11
項目名稱:車載adas應用申請使用試用計劃:1.目前在做的項目為車載ADAS,計劃使用Hi35xx系列芯片,項目內容包括車輛/行人目標檢測,車道線偏離預警,碰撞預警。2.項目內容不要求實時,用3516或3519能達到5-10幀每秒的處理速度即可
2020-11-19 20:45:45
:2022.1 bash
提示如下內容說明進入鏡像成功。運行行人跟蹤檢測app需要注意的是當前的模型是有一定的適用條件的,一般支持RTSP視頻流,同時也支持通過文件讀取的視頻資源進行檢測,但是
2023-08-02 10:48:27
步的了解,那么今天,給大家講解一個對于視覺檢測算法比較重要的坐標系定位,如何通過坐標系的定位實現算法檢測區域的跟蹤。今天的內容主要使用了模板匹配進行定位,在模板定位的基礎上建立坐標系,卡尺檢測,抓圓通過坐標系進行ROI仿射變換。
2020-08-12 21:03:32
芯片上方案比較少。我們嘗試在定點DSP上處理人臉檢測效率低,沒有達到我們預期的目的。而TMS620C6748芯片是我們另外一個選擇。該方案需要通過視頻采集圖像,利用圖像檢測算法獲取運動目標,然后對運動目標區域進行人臉檢測算法識別,并對目標進行跟蹤。
2015-09-10 11:09:12
。此外,還應仔細檢測加工基準面位置的準確度、機械加工余量分布以及壁厚偏差等。視覺尺寸檢測,視覺外觀表面體積測量系統-機器視覺_視覺檢測設備_3D視覺_缺陷檢測二、尺寸檢測的方法產品的實際尺寸往往不可或缺
2021-07-08 10:02:19
缺陷,表面缺陷檢測的發展可以劃分為三個階段,人工檢測階段、激光掃描和CCD成像技術檢測階段、信息化發展階段。目前常用的缺陷檢測方法有渦流檢測方法、紅外檢測方法、漏磁檢測方法、計算機視覺檢測方法。沖壓件
2021-11-02 14:02:32
跟蹤方法原理是, 固定視覺傳感器在焊槍正前方, 通過直接觀察焊槍與焊縫中心線的位置關系, 提取偏差信息, 輸出糾偏控制電壓. 由于鋁合金具有較強的反光性, 在熔池前端區域有一個反光區, 檢測的間隙
2018-11-02 10:48:48
【作者】:謝堯芳;蘇松志;李紹滋;【來源】:《廈門大學學報(自然科學版)》2010年02期【摘要】:行人檢測是計算機視覺領域中的研究熱點,其實質是一個二分類問題.目前基于統計的行人檢測技術已取得了
2010-04-24 09:48:05
距離量測估計方法,充分利用人體距離像擴展特性,減少雜波量測。實測結果表明距離像 GC 和 MIRA 都可以作為人體合理的距離量測估計。傳統的基于距離量測的人體跟蹤方法,只在距離像上進行目標檢測和量測估計
2021-12-20 15:49:31
如題,公司使用的開發板是imx6q-c_v1.3,內核是linux-3.0.35,公司領導要求在板子上實現攝像頭在線的行人跟蹤檢測功能,我已經移植了opencv到開發板上運行,發現opencv自帶
2022-01-10 07:18:03
怎么實現基于DSP的車載式壓實度實時檢測系統設計?
2021-05-17 07:05:01
怎樣去設計一個基于樹莓派和Python的無人機視覺跟蹤系統呢?有哪些設計步驟呢?
2021-11-12 07:15:02
在物流搬運行業,拳頭機器人由于其獨特的并聯結構,常用于高速整列、裝箱等場合。其中,拳頭機器人的視覺線跟蹤技術正得到廣泛的應用,如下圖所示:
2020-08-06 06:30:31
機器視覺 --檢測圖像邊緣小程序
2015-08-23 21:35:10
高產量下的薄膜質量,提出了基于機器視覺檢測技術在線薄膜缺陷自動化檢測方法。機器視覺檢測技術的薄膜表面缺陷檢測,通過建立CCD接收到的放置薄膜前后的圖像,利用同樣的圖像采集硬件和不同的軟件分析方法。為
2020-10-30 16:15:47
角點是圖像很重要的特征,對圖像圖形的理解和分析有很重要的作用。角點檢測(Corner Detection)是計算機視覺系統中用來獲得圖像特征的一種方法,廣泛應用于運動檢測、圖像匹配、視頻跟蹤、三維
2016-01-22 13:46:00
、計算、最終進行實際檢測、控制和應用。產品的表面缺陷檢測是機器視覺檢測的一個重要部分,其檢測的準確程度直接會影響產品最終的質量優劣。由于使用人工檢測的方法早已不能滿足生產和現代工藝生產制造的需求,而利用
2016-01-20 10:29:58
為研究夜間追尾事故中本車智能防撞預警方法,本文提出了一種基于毫米波雷達和機器視覺的前方車輛檢測方法。利用多傳感器融合數據,檢測前方車輛的距離、速度等。建立傳感器之間轉換關系,轉換雷達目標的世界坐標到圖像坐標。
2021-06-10 10:23:08
求推薦幾款視覺模塊,能識別顏色、形狀、能測距定位跟蹤物體,比如把十個碗碟疊起來,視覺模塊能識別定位跟蹤到碗碟的邊緣!謝謝!最好是基于ARM內核
2017-07-17 12:04:35
學生接觸Labview有一定時間了,也算積累了一些小經驗,現在想要用來做類似物體表面缺陷檢測這樣的機器視覺項目,對于Labview中的視覺模塊以及視覺助手也比較熟悉,但是到具體應用還存在一定距離
2015-05-29 12:33:05
=339699&page=1#pid2608768現在移植到dsp上進行人檢測實驗。重新訓練基于彩色圖像的行人檢測分類器。速度還有待優化截圖如下:后期繼續做速度優化。`
2014-06-27 22:44:05
預警)、DMS(駕駛員疲勞檢測)、BSD(盲區檢測算法)等的搭載需求正不斷提高。瑞芯微RV1126支持Linux操作系統,擁有獨立的NPU,集成編解碼處理器有著十分強大的視頻編解碼能力,非常適合車載視覺
2022-08-02 16:49:49
在檢測道路行駛過程中的車輛或行人的存在或者行為狀態所用到的感應器件
2019-06-08 10:33:41
重要意義。但是在行人檢測中卻由于行人兼具剛性和柔性物體的特性,外觀易受穿著、尺度、遮擋、姿態和視角等影響,使得行人檢測成為計算機視覺領域中一個極具挑戰性的課題。在日前的行人檢測方法中,駕駛系統中的超聲波
2018-12-12 15:24:03
Mean Shift 是一種密度梯度的無參數估計方法,應用于目標跟蹤領域有較好的性能。然而Mean Shift 算法是一種半自動跟蹤方法。為此,提出邊緣檢測與Mean Shift 相結合的方法。利用結
2009-05-27 15:23:14 24
24 根據生物注意機制,該文提出了一種基于視覺注意模型和進化規劃的感興趣區檢測方法。采用進化規劃方法分割圖像候選區域;區域興趣度由視覺注意模型產生的局部顯著和進化規
2009-11-13 14:13:0029 由于淺埋小目標的雷達截面較小、埋設環境復雜,導致單幀檢測結果中存在大量虛警,該文提出一種“預篩選-交替后向跟蹤-多幀確認”目標檢測方法。首先利用CFAR 檢測、形態濾
2009-11-17 15:06:0417 序列圖像中的運動目標跟蹤是計算機視覺的一個重要組成部分,跟蹤算法的魯棒性和計算量是算法的關鍵。本文提出了一種基于Hausdorff 距離的目標跟蹤方法,該算法結合運動檢測和
2009-12-18 16:08:0311 目前有很多大產品的配件比如橡膠圈,在裝配過程中容易脫落、漏檢導致產品不良,對公司超成一定損失。技術在不斷發展的,隨著機器視覺技術的越來越成熟,現在可以用2D/CCD視覺檢測系統對膠圈數量、2D膠圈
2023-06-05 11:39:35
指向和單脈沖跟蹤在車載動中通中的應用
概述:現階段車載“動中通”跟蹤方式主要有慣導向方式和單脈沖跟蹤方式,2種跟蹤方式有各自的優缺點。介紹了一
2010-04-28 16:24:0232 EVP-6100演示視頻 行人檢測系統
視頻教程
2010-11-18 16:21:4843 要求電流檢測的車載應用車載應用中的電流檢測包括控制通過螺線管和噴射器的電流。例如
2010-12-29 16:23:08 1228
1228 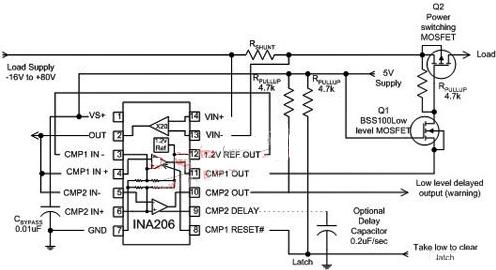
智能監控是當前計算機視覺領域中的熱點問題之一。本文提出了一種運動檢測與視覺跟蹤相結合的智能監控系統,能自動完成軌跡的初始化和終止,能夠對數目可變的目標進行自動跟蹤
2011-09-14 15:16:12138 本文設計了一種精度高,穩定性好的基于單目視覺的車載追尾預警系統。它利用一種新的邊緣檢測算法識別前方道路,然后利用陰影檢測與跟蹤相結合的方法識別前方車輛,接下來根據
2012-10-24 16:00:002271 
利用粒子濾波實現行人跟蹤是視頻智能監控的主要方法之一,但粒子濾波的粒子退化問題尚未得到一個比較理想的解決方法。本文利用重采樣后的粒子集,構造經驗分布函數,用支持向
2013-08-20 16:57:020 基于機器視覺的LED芯片檢測方法
2017-02-07 18:25:2121 移動機器人視覺導航中基于Hough變換的直線檢測與跟蹤_周燕紅
2017-03-19 11:45:571 基于Codebook背景建模的視頻行人檢測_黃成都
2017-03-19 11:41:390 行人慣性導航零速檢測算法_費程羽
2017-03-19 19:07:044 GPS接收機設計了一個只有2 cm定位誤差的導航系統,但他們并沒有考慮在一些不能使用GPS的區域,如隧道。張傳斌等人則把UKF濾波方法應用到車載導航中,但UKF濾波方法計算量大,難以滿足高速公路上實時性要求很高的車載定位跟蹤系統。針對以上
2017-09-05 17:17:033 系統,可以實現目標檢測跟蹤系統的小型化,智能化,并以具體飛行目標為例進行了目標的識別和跟蹤。 1.主要研究以下方面的內容: (1)嵌入式視覺跟蹤系統的硬件設計 嵌入式平臺是解決實時性和小型化的有效途徑,采用基于 PIC32的嵌入式
2017-10-18 15:09:567 功能,360%范圍內實時檢測運動目標和重新定位新的目標;用PTZ 攝像機系統模擬中央凹視覺功能,完成局部精確注視與平滑跟蹤。給出了系統控制策略、運動檢測算法及實驗結果。為解決視覺跟蹤中高分辨率、大視場和實時性三者之間的
2017-10-18 15:58:196 行人檢測如今已經應用到生活的多個領域,如智能監控、無人駕駛和智能相機等。自hog提出行人檢測這一思想,到如今已經有約有數千種方法。現有的行人檢測方法大致可以分成三大類:DPM變體、深度網絡和決策森林
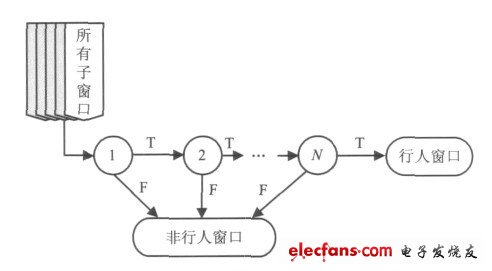
2017-11-05 10:43:385 窗口法對整幅紅外圖像進行遍歷,用訓練好的SVM進行分類檢測。在LSI Far Infrared Pedestrian Dataset數據庫上實驗證明,基于多特征的檢測方法相較于單一特征的方法提高了紅外行人檢測的精度,降低了誤檢率和漏檢率。
2017-11-08 15:05:3614 針對四旋翼直升機目標跟蹤這一問題,提出并設計了一套基于視覺的四旋翼直升機系統和方法。首先,在Matlab中對四旋翼直升機建模仿真,使用經典PID控制算法設計位置回路和姿態回路:其次,設計了一套
2017-11-14 10:25:379 在行人檢測中,由于外界環境復雜變化和行人自身的不同特點,往往會造成錯誤檢測以及遺漏檢測。針對以上問題,文中提出一種基于圖塊和二階統計特征的方法,提高檢測的準確率。首先利用基于圖塊的幀差法進行前景檢測
2017-11-14 10:44:5513 對圖像和視頻中的不同類別的對象的檢測是計算機視覺研究的基本任務。行人檢測是一個熱門的研究課題。行人是交通系統中的主要參與者,所以對視頻監控系統中的行人檢測對智能交通系統的研究和應用有著重要的意義
2017-11-15 10:51:5611 針對復雜環境中的行人檢測問題,提出了一種有效的基于分層稀疏編碼的圖像表示方法。首先通過兩層稀疏編碼模型結合基于KSVD的深度學習算法來獲得圖像的稀疏表示,對圖像塊及同一區域的高階依賴關系進行了建模
2017-11-24 10:24:060 針對在復雜場景下,聚合通道特征(ACF)的行人檢測算法存在檢測精度較低、誤檢率較高的問題,提出一種結合紋理和輪廓特征的多通道行人檢測算法。算法由訓練分類器和檢測兩部分組成。在訓練階段,首先提取ACF
2017-11-27 10:25:160 為了在行人檢測任務中使卷積神經網絡(CNN)選擇出更優模型并獲得定位更準確的檢測框,提出一種改進的基于卷積神經網絡的行人檢測方法。改進主要涉及兩個方面:如何決定CNN樣本迭代學習次數和如何進行重合
2017-12-01 15:23:500 在車載衛星通信中,由于低輪廓車載天線具有良好的隱蔽性和使用性,應用前景較為廣泛。但要實現性價比達到最優,天線跟蹤控制器的設計是關鍵技術之一。在脫離航向引導信息的情況下,要實現車載天線穩定跟蹤
2017-12-08 01:17:03435 
后無法進行初始化.針對時空上下文算法存在的弱點。本文提出了一個基于低秩重檢測的多特征時空上下文跟蹤方法.首先利用多特征對時空上下文進行多方面的提取。構建復合時空上下文信息。充分利用目標周圍的特征信息,提高目
2017-12-15 15:01:380 針對在基于視頻的空中簽名認證系統中,現有方法無法滿足指尖跟蹤的準確性、實時性和魯棒性要求的問題,在對比研究目前常用的多種跟蹤方法的基礎上,提出一種基于時間上下文的跟蹤一學習檢測(TLD)方法。在原始
2017-12-19 18:59:060 針對經典跟蹤一學習一檢測(TLD)目標跟蹤算法由于檢測區域過大而導致的檢測時間過長及對相似目標跟蹤處理效果不理想的問題,提出一種檢測區域可動態自適應調整的方法-TLD-DO。該方法利用兩次
2018-01-03 16:33:180 為了解決變結構目標跟蹤過程中目標失跟率較高的問題,提出了一種基于視覺量子(vision quantum,簡稱VQ)的目標跟蹤方法.該方法首先在圖像內自上而下地輻射視覺量子采集灰度信息,統計量子內部
2018-01-08 14:59:400 人員進行處理,還需要實時統計客流量,方便管理人員及時發揮調度作用,合理配置資源。因此,基于車載視頻監控的乘客檢測及跟蹤方法成為計算機視覺和模式識別領域的研究熱點。本文要解決的主要問題有:復雜環境的影響,比如
2018-01-23 15:41:091 為使舞蹈機器人根據行人的運動軌跡進行路徑的動態規劃,增強與人共處的能力,提出一種基于激光雷達的室內行人跟蹤方法。獲取激光原始數據并進行預處理,根據激光數據的分布特點對DBSCAN算法進行優化,實現
2018-02-05 15:33:330 為提高長時目標跟蹤的魯棒性和準確性,提出一種改進的跟蹤學習檢測( TLD)方法。利用少量具有尺度不變特性的BRISK特征點和均勻分布點組成跟蹤點集合代替TLD中的均勻分布跟蹤點。這樣不僅可以減少跟蹤
2018-02-27 13:38:312 針對非重疊視角下的行人重識別和高維特征提取等問題,提出基于塊稀疏表示的行人重識別方法。采取典型相關分析( CCA)方法進行特征投影變換,通過提高特征匹配能力來避免高維特征運算引起的維數災難問題,并在
2018-03-29 14:57:480 檢測前跟蹤(Track-Before-Detect,TBD)技術是一種有效的雷達微弱目標檢測方法,并且在多個領域有著廣泛的應用。這種技術不對單幀的數據做目標檢測判決或航跡回溯,而是通過對目標的多幀數
2018-06-21 09:09:007894 
行人是城市交通系統的主要參與者,保障行人安全和減少其對機動車的干擾是城市交通系統建設的重要目標,因此對行人交通的研究也越來越受到重視。行人交通研究的主要問題包括行人檢測、目標跟蹤和行為分析。基于視頻
2019-07-29 08:06:002091 
Metoak Technology展示了用于ADAS和自動駕駛車輛的車載視覺傳感模塊,具有實時檢測車輛可行駛區域的功能。
2018-11-26 06:04:004172 行人檢測是當前機器視覺領域的挑戰性課題之一。為了提高行人檢測效率,提出一種基于優化圖的半監督學習的行人檢測算法。首先,提取每幅圖像的形狀上下文特征,并采用選擇性搜索提取出行人候選區域建議框;然后
2018-12-21 17:23:065 自主駕駛礦 井機車需要實時檢測和定位行駛前方的巷道行人,激光雷達等非視覺類方法成本高昂,而傳統基于特征提取視覺類方法無法解決并下光照差且光線不均勻的問題。提出一種基于深度學習的井下巷道行人視覺定位
2019-03-28 16:49:5212 針對復雜環境下行人檢測不能同時滿足高召回率與高效率檢測的問題,提出一種基于卷積神經網絡(CNN)的行人檢測方法。首先,采用CNN中的單步檢測升級版網絡YOL0v2 初步檢測行人;然后,設計一個網絡
2019-04-12 17:30:566 最近在做基于激光信息的機器人行人跟蹤發現如果單獨利用激光信息很難完成機器人對行人的識別、跟蹤等功能。
2019-07-08 17:04:333036 谷歌在去年便開始研發基于視頻的行人監測系統,其采用的便是深度學習算法,能在 0.25 秒內準確識別路上的行人。在谷歌負責計算機視覺和機器學習的研究科學家 Anelia Angelova 表示,「視覺信息相比雷達數據,可以給車描摹一個更廣闊的視域,但是整個處理過程要慢一些。
2019-08-08 08:35:071928 行人在車輛靜止時背對著車輛向前方行走,行走到一定位置之后等候車輛起動,待車輛向前行駛一段距離后,行人繼續向前運動,并伴有橫穿道路等動作。從圖5 的跟蹤曲線可以看出,識別行人的外接矩形寬度變化比較顯著,這符合實際情況,由于行人行走時腿部跨度造成封閉矩形寬度變化明顯。
2019-08-09 17:29:404126 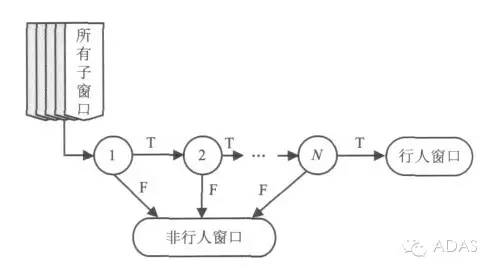
針對復雜環境下行人檢測不能同時滿足高召回率與高效率檢測的問題,提出一種基于卷積神經網絡(CNN)的行人檢測方法。首先,采用CNN中的單步檢測升級版網絡YOLOv2初步檢測行人;然后,設計一個網絡
2019-11-05 16:15:157 或刮擦,從而保護交通環境中的運動行人安全,運動行人檢測技術的研究開發將為我國車輛安全輔助駕駛技術的研究提供有力的理論和技術支持。
2020-07-30 17:53:005 在Fynd的研究團隊一直在訓練一個行人檢測模型來支持我們的目標跟蹤模型。在本文中,我們將介紹如何選擇一個模型架構,創建一個數據集,并為我們的特定用例進行行人檢測模型的訓練。 什么是目標檢測 目標檢測是一種計算機視覺技
2021-01-07 14:04:533113 行人是城市交通系統的主要參與者,保障行人安全和減少其對機動車的干擾是城市交通系統建設的重要目標,因此對行人交通的研究也越來越受到重視。行人交通研究的主要問題包括行人檢測、目標跟蹤和行為分析。基于視頻
2021-03-29 11:47:122454 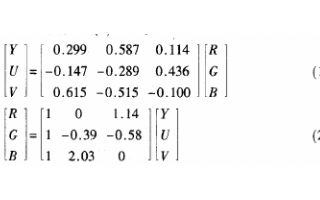
行人檢測是目標檢測領域中重要的研究課題,其在智能駕駛系統、視頻監控、人流量密度監測等領域有廣泛應用。但由于行人背景的復雜以及個體本身的差異,行人檢測成為目標檢測領域的研究難點之一。
2021-05-02 09:55:003487 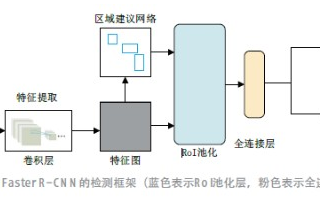
針對行人再識別過程中相同身份行人圖像顏色不一致,以及不同身份行人圖像顏色相近問題,提出一種基于雙分支殘差網絡的行人再識別方法。將RGB圖像和灰度圖像分別輸入預訓練的 Resnet-50網絡,獲得
2021-04-29 11:09:546 利用單尺度特征映射進行多尺度行人檢測存在準確率和效率較低的問題。為此,提出一種基于多分辨率濾波通道的多尺度檢測方法。應用尺度感知池增強感受域對應性,通過軟決策樹實現尺度不變性,在使用滑動窗分類策略
2021-05-27 16:30:417 針對傳統卷積神經網絡在行人檢測中卷積速度慢、抗噪弱、冗余大的問題,提岀了一種基于深度稀疏自編碼網絡的方法。首先在輸入層后添加一層感興趣層,在非相鄰和相鄰特征(nor- neighboring
2021-06-11 14:53:3512 面向特種頭型微鉆的視覺檢測方法
2021-07-01 15:43:482 這是一種平移/傾斜伺服設備,可幫助相機使用視覺自動跟蹤彩色物體。現在我們將使用我們的設備幫助相機自動跟蹤彩色對象。
2022-07-10 12:10:54969 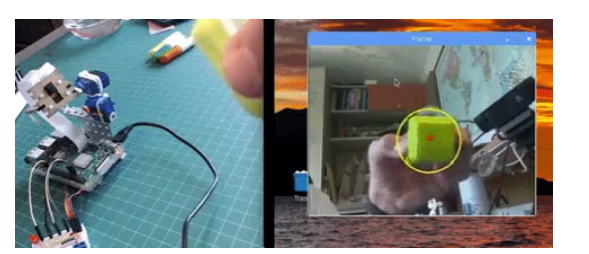
9月7日,上汽AI LAB視覺團隊自動駕駛檢測跟蹤算法在國際榜單nuScenes上斬獲全球第一,將跟蹤算法關鍵指標AMOTA(Average Multiple Object Tracking Accuracy)在現有最高記錄上提升3個百分點。
2022-09-09 16:25:47776 焊縫跟蹤器的原理 創想智控自主研發的視覺焊縫跟蹤器,由鏡頭、光學傳感器、中央處理器構成,可無需外接工控機,直接與機械臂控制器、PLC和其他多軸控制器相連,直接輸出運算結果,實現實時跟蹤、在線檢測、自動糾偏和異常
2022-09-19 17:06:471153 目標跟蹤是計算機視覺中非常重要的任務之一。它剛好在目標檢測之后出現。為了完成目標跟蹤任務,首先需要將目標定位在一幀中。
2022-10-12 09:40:06958 機器視覺的檢測方法可以很大程度上克服人工檢測方法的抽檢率低、準確性不高、實時性差、效率低、勞動強度大等弊端,在現代工業中得到越來越廣泛的研究和應用。
2022-12-07 11:16:471402 在先進駕駛輔助系統中, 基于視覺的行人檢測只能對攝像頭視野范圍內的無遮擋行人進行檢測, 并且易受天氣的影響, 在極端天氣下無法工作。
2023-02-22 10:17:462314 振動分析是測試機器健康狀況和進行預測性維護的一個很好的工具,階次跟蹤分析被證明是檢測旋轉機械(如電機和發動機)故障的一個理想方法。
2023-03-08 14:51:00314 多目標跟蹤(MOT)任務的關鍵挑戰是跟蹤目標下的時間建模。現存的用檢測跟蹤的方法采用簡單的heuristics,如空間或外觀相似性。
2023-04-18 09:12:55651 機器視覺檢測是指在圖像或視頻中識別和定位具有特定特征的目標的過程,通常涉及目標識別、目標跟蹤、目標分割等任務。它是機器視覺領域中最核心和最基礎的技術之一,具有廣泛的應用前景。
2023-05-08 09:34:52327 數據的獲取尤為重要,是 科學的行人服務設施規劃設計和優化配置的基礎。文章采用基于SSD模型行人檢測與現常用的基于HOG與SVM特征識別 算法比較對行人檢測,并利用Kalman濾波算法對行人跟蹤,使用OpenCV3.4.7計算機視覺庫和MFC對行人監
2023-07-20 14:45:010
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論