6月21日,移遠通信全新雙頻段、多星座、高精度GNSS定位模組LC29H正式面世。該模組利用雙頻定位技術,結合RTK(實時動態載波相位差分)技術和DR(慣性導航技術),滿足厘米級和分米級的高精準
2022-06-21 18:27:43 3404
3404 
Boards? 開發板,為物聯網設備帶來使用簡單、性價比高的厘米級高精定位服務。 ? 開發板上搭載的LC29H是一系列雙頻段、多星座GNSS模組,支持同時接收GPS、BDS、Galileo
2023-10-18 11:20:19639 
為 4208x3120。我們可以通過v4l2獲取原始數據流。命令如下。v4l2-ctl --stream-mmap -d0但是如果我們在本地保存raw的話,v4l2命令可能會遇到緩沖區溢出的問題。命令
2023-03-30 06:21:23
嗨,大家好,這是發送/接收原始數據(數組EX:UTI8TXBuff[32);從移動到PSoC4-BLE板)的最佳方式。數據可能是一個命令。在創建項目時,我需要選擇哪些配置文件?謝謝,Ashok R
2019-08-27 08:01:45
分析口徑不同,即使將數據導出了也無法立即投入數據可視化分析中去。那么,面對這些存放在不同系統的原始數據,要怎么落地數據可視化分析,推動企業數據化運營管理?用全面可視化ETL搭建數據中臺,打破數據孤島
2021-11-02 10:09:32
數據庫寫入時如何覆蓋原始數據
2017-10-25 11:29:42
我目前是使用了生產者消費者循環架構來寫程序,生產者采集數據,消費者保存原始數據,我現在想做到;采集出來的原始數據同時能夠完整傳遞到另外的循環進行數學處理,濾波等等,然后再完整保存下來,這樣應該如何做(局部變量和消息通知器都會丟失數據)。各位大神請指導一下,有圖片或案例最好不過了
2015-09-18 11:10:38
大家好我正在研究來自霍尼韋爾的 ABPDLNN100MG2A3 壓力傳感器,它是一種 i2c 通信,我已經通過 i2c 讀取傳感器數據并將其保存在兩個變量 a 和 b 中,問題是如何將原始數據轉換為毫巴,請分享任何想法。
2023-02-01 06:23:01
的Origi
右邊LED是ADS1230,沒有濾波的原始數據。
明顯ADS1230比AD7190的數據穩定很多啊
這種情況下,AD7190還能改善嗎
2023-12-08 07:21:13
請問一下只使用AWR1642BOOST板子不用DCA1000EVM該如何將采集的原始數據發送到PC上?
2021-08-18 13:12:13
原始數據。但hwafft_256pts 用data(此時FFT數據儲存在DATA里)里的數據做IFFT得不到原始數據,如果用scratch_data里的非FFT數據做IFFT反而可以得到原始數據。小弟有點搞不懂這個現象,有誰可以解釋一下是哪里出錯了嗎?
2019-10-23 09:08:07
你好,非常我對原始數據的正確性有疑問。我從磁力計讀取原始數據。我在水平平面上繞Z軸旋轉后達到了以下結果,數據用高斯表示:紅色 - X數據,綠色 - Y數據,藍色 - 橢圓。我知道這個數據集不正確。我
2018-10-11 16:50:07
(LSM6DSL) 我想知道為什么原始數據(角速率)要乘以靈敏度。將角速度(陀螺儀原始數據)乘以靈敏度就變成了mdps,mdps到底是什么?float_t lsm6dsl_from_fs500dps_to_mdps(int16_t lsb) {返回 (( float_t )lsb * 17.50f);}
2022-12-02 07:31:05
我用MPU6050接到小熊派開發版上讀取到加速度原始數據,按照網上說的公式轉換成加速度,加速度基本上都是在0附近,要大力快速晃動MPU6050傳感器,加速度值才會變化。這是什么原因?
2023-05-17 19:28:34
MPU6050的原始數據怎么處理能得到向x,y,z方向移動的距離?
2023-11-08 07:41:32
更糟糕。我知道顯示的數據是原始的,校準似乎正在糾正它。我比較了測量一個有損電纜之間的租金(沒有顯示這個現象)VNA和“壞”VNA和相關性非常好。我的直覺告訴我,2號港口的匹配非常差,這可以解釋圍繞
2018-10-10 17:45:50
STM32單片機驅動MPU605互補濾波 算法將原始數據轉化成歐拉角(四元數法),串口顯示歐拉角,參考匿名代碼
2016-07-06 10:02:17
設計
**· **支持多系統多頻高精度原始數據輸出,便于第三方集成
**· **最具性價比的高精度定位 GNSS 解決方案
*附件:TAU1312.pdf
2023-09-06 09:54:58
mpu6050+stm32的原始數據采集程序,通過串口發送到PC: printf("\r\n---------加速度X軸原始數據---------%d \r\n",GetData
2016-05-23 15:43:47
用51讀取mpu6050原始數據,為什么數據都是-004,而且還不變。代碼就是網上找的常見的。
2017-03-06 14:24:01
原來做了一個小四軸,后來改板子, 電路也還是和英文原版的電路圖一致,4個電容.焊接幾個后,發現了一個很奇葩的問題,燒寫程序驗證原始數據時候,發現重力Z軸的原始數據,正確來說是8192,但是水平
2019-06-02 23:45:07
是0.2588和0.5258,剛好只有原始數據的1/2。這是為什么?
看了一下ADC的采集數據和波形,和初始信號差不多。
困擾一整天還是沒想通,求助各路大神。
2024-03-11 07:24:47
項目名稱:IMU數據處理試用計劃:申請理由最近在做IMU的數據收集及處理,想借助發燒友論壇和ESP32-DevKitC-32D模組開發板完善該項目的開源設計。項目計劃根據文檔
2020-07-03 10:00:45
,A-GNSS 輔助定位,星歷預測,DR 組合導航應用。 2、支持 L1+L5 雙頻定位,支持 L1,L5 頻段獨立定位? 內置高性能雙核 ARM Cortex M4F 處理器,集成 FPU 處理單元
2022-04-11 21:46:07
我讀出的六組原始數據如下,想請問一下 ,這是配置問題還是硬件問題
2019-07-28 23:49:55
使用NV12原始數據,創建bm_image的注意事項?
2023-09-19 06:12:24
的原始數據濾波之前,一般需要進行零偏校準。一般陀螺儀需要上電校準零偏,加計的零偏與IMU安裝有關,校準一次以后上電始終使用校準值即可(或者不予校準)。零偏校準方法基本都是水平靜止放置機體多次采樣取均值
2019-06-11 08:00:00
描述MP1584EN 板該板基于 IC MP1584EN 的原始數據表布局。根據安裝的組件,它可以配置為不同的電壓。絲印包括一個表格來指示輸出電壓。
2022-08-22 06:14:03
想實現以太網到WIFI的橋接/中繼模式,RW007對于PC和路由器相當于透明的,RW007工作在SPI STA方式,在調試中發現原始以太網數據包經過RW007后,數據包中的PC機的MAC被替換成了RW007的MAC,導致無法正確通信。請問,如何使RW007直接傳輸以太網發過來的原始數據?
2022-09-28 10:10:32
有人可以分步解釋如何使用 Position2Go Board 在 MATLAB 上提取原始數據來繪制距離多普勒圖嗎?
2024-01-25 06:18:55
MPU6050是什么?如何去讀取MPU6050的加速度計和陀螺儀的原始數據呢?
2021-12-15 06:03:33
如何將ADC采集的原始數據(從-8192~+8192)的序列轉換成VisualAnalog中Pattern Loader可以接受的I Only文件,文件格式是怎樣的?主要是用來評估采集卡中ADC的性能。
2023-12-15 06:22:23
我正在使用 lsm6dsl 傳感器。我正在獲取有關寄存器的數據。如何將原始數據轉換成角度
2022-12-15 08:19:34
如何提取sensortile.box的原始數據?
2022-12-30 07:09:36
STM32+MPU6050讀取加速度計和陀螺儀原始數據。
2022-02-10 07:04:08
如果我們可以確定帶隙電壓和對應的ADC原始數據那么我們就可以通過比例運算知道VCC,因為滿量程對應的就是VCC,也就是0x0FFF對應VCC
即VCC:0xFFF=帶隙電壓:帶隙電壓ADC
2023-06-25 08:18:31
如何繪制DAC原始數據以及ADC采集數據的波形圖?
2021-11-19 06:42:31
,從而導致角度估計中的誤差增加。您還必須首先使用可以在 GitHub 上找到的轉換公式將原始數據轉換為角速率。float_t lsm6dso_from_fs125_to_mdps(int16_t lsb){return ((float_t)lsb) * 4.375f;}
2022-12-16 07:09:04
一個激進的想法。如何讓用戶訪問原始數據&創建自己的報告?用戶可以分享他們的報告在這個論壇上生成腳本或軟件,也許Xilinx甚至可以使用最流行的工具。對于Xilinx和Xilin來說,這似乎是
2019-03-29 14:15:19
目前在用stm32做一個小型心電儀,實現方法是通過AD轉換獲取心電波形的原始數據,然后進行分析,目前有一個關鍵的困難,那就是如何在知道這些原始數據的情況下,分析出心率,希望大家可以給一些建議和幫助,謝謝
2017-04-21 17:03:59
親愛的先生:HP 11664A探測器的一端連接到定向耦合器的輸出,另一端通常連接到測試儀器(例如:網絡分析儀)。我想在示波器上看到HP11664A探測器的原始數據。我想知道安捷倫是否出售供服務
2019-03-20 11:01:45
嗨,我正試圖訪問在PIC24H啟動器套件上的加速度計的原始數據。在查閱了有關文檔和板上可用引腳的硬件細節之后,我無法找到訪問這些數據的任何方法,以便理解工作原理,并進行一些實驗。請告訴我,如果有任何
2019-10-11 13:26:22
各位大神,我最近做的一個項目,原始數據接收到了,但分析結果為0,見圖1,圖2為采集到數據分析結果,圖3為程序框圖,感謝指點,萬分感謝!!!!!
2018-04-30 19:53:58
我無法使用 MATLAB 中的 Position2 Go 雷達套件提取原始數據。
MATLAB 錯誤:
使用串行時出錯(第 99 行)指定了
無效的端口。
RadarSystem(第 10 行)中
2024-01-31 06:15:43
我得到的只是原始數據,怎么轉換成加速度,有沒有人有數據轉換代碼
2018-01-21 20:08:55
我最近要用mpu6050,就在論壇找了個例程,讀取原始數據的。但lcd顯示一直不變,甚至連不連I2C都沒區別。程序我只能大概看懂,實在不知道怎么解決,求教啊
2018-04-26 11:59:46
數據表是我自己添加的,我想用excel實時導出256點的原始數據,但是使用excel的數據傳輸速度很慢,導出的效果也不好,所以我想問一下有沒有建議實時導出Micrium中的原始數據。 因為我剛剛使用了 Micrium 和 REF BGT60LTR11AIP M0,所以我一無所知。 任何建議。 非常感謝!
2024-01-26 06:11:02
在原始數據中進行讀取文件,根據條件篩選判斷出想要的數據,進行保存!(LabVIEW)聯系qq:1154994116;
2020-03-20 11:16:10
我最近在使用Maury ATS軟件在PNA-X N5242A上測量的ADS上繪制了Sopt(gamma opt)的問題。原始數據以.sf格式保存,我使用s參數塊讀取和模擬史密斯圖表上的數據。在某些
2018-12-17 16:52:37
請教一個問題啊,從mpu6050獲取原始數據,怎么轉化成真是有效的數據啊,剛入門,大神指導一下吧
2017-06-24 12:58:54
請問EVAL-ADIS2 這塊評估板,在配合adis16460使用時,板上的dsp對采集的原始數據,是否進行了處理,如果我買了adis16460,是否可以達到和評估板相同的使用效果?
2019-01-09 09:40:09
我有 STEVAL-IDB011V1 板,我想通過 BLE 發送原始數據或外部傳感器數據,我已經修改了 BLE 傳感器演示示例。我收到類似無法正確讀取特征的錯誤。
2022-12-12 06:39:32
想實現以太網到WIFI的橋接/中繼模式,RW007對于PC和路由器相當于透明的,RW007工作在SPI STA方式,在調試中發現原始以太網數據包經過RW007后,數據包中的PC機的MAC被替換成了RW007的MAC,導致無法正確通信。請問,如何使RW007直接傳輸以太網發過來的原始數據?
2022-10-21 14:12:47
用原子哥的例程讀出了MPU6050原始的的數據,然后用這個原始數據去轉換角度。用加速度計的數據換算角度:①首先得到ACCX、ACCY、ACCZ(即XYZ三個軸的加速度);②Angle_X=atan
2019-04-03 01:52:23
序列,通過DMA1將原始數據寫入DAC寄存器,同時產生正弦波,AD讀取頻率稍大于DA頻率。將AD讀取寄存器中的數據以串口發送至matlab軟件,以實現對DAC原始數據以及ADC采集所得到的數據的實時波形圖...
2021-08-17 07:16:11
我現在采集到的ADIS16477-2的imu數據,測試陀螺、加速度計的漂移非常大,IMU是放在臺面上鏡子不動的。
下圖第一排陀螺x、y、z的原始數據,第二排分別是5s鐘平滑后的數據。
下圖第一排
2023-12-28 07:25:03
摘要:本文研究了S A R雷達原始數據B A V Q壓縮算法的硬件實現。采用 A D S P 2 1 0 6 0 ( S H A R C ) 芯片結合 A l t e r a公司的F L E X l O K l 0 L C 8 4 - 3芯片組成最簡的系統,采用
2009-05-07 10:41:47 14
14 本文研究了SAR雷達原始數據BAVQ壓縮算法的硬件實現。采用ADSP21060(SHARC)芯片結合Altera公司的FLEX Xl OK l 0LC84-3芯片組成最簡的系統,采用流水線并行處理高速有效的實現了BAVQ壓縮算法。
2009-05-09 10:55:2421 合成孔徑雷達(Synthetic Aperture Radar,SAR)原始數據模擬是SAR 模擬的基礎,對SAR 系統研究有重要意義。時域模擬方法重現了回波數據的產生過程,數據逼真度高,被廣泛使用,但
2009-12-19 14:14:5413 該文提出了一種基于離散余弦變換(DCT)和網格編碼量化(TCQ)的SAR 原始數據壓縮算法。SAR 原始數據可以看成是距離向和方位向的2 維線性調頻信號的線性平移疊加,因而含有豐富的
2010-06-23 14:29:010 全球首款雙頻GNSS智能手機的發布,再加上Android系統提供的GNSS原始數據的訪問權限,為定位服務開發者創造了令人興奮的機會。對GNSS原始數據的訪問權限為手機使用更高級的定位算法打開了一扇大門,此前僅有更高級的衛星定位接收器能夠使用相關算法。這能讓普通用戶充分享受伽利略定位系統的獨特優勢。
2018-06-06 11:49:365582 本文檔的主要內容詳細介紹的是使用STC89C52單片機控制LCD1602顯示MPU6050的10位原始數據程序免費下載。
2019-08-06 16:39:0627 本文檔的主要內容詳細介紹的是使用軟件模擬IIC基于STC8讀取MPU6050原始數據的C語言程序免費下載。
2019-11-01 17:06:0041 LC29D內部集成高性能6軸加速度計和陀螺儀,通過測量自身的加速度和旋轉狀態,判斷出設備當前的運動狀態,結合慣導算法可以自主確定位置信息,可以在短時間內實現持續高精度定位,即使在隧道、地下車庫等無GNSS信號環境中,仍能保持優越的定位性能。
2020-07-02 17:04:524192 仍能保持可靠授時 支持實時位置/授時位置雙輸出 集成抗干擾及防偽星功能,支持12路限波器 支持T-RAIM技術,保證信號完整性 支持原始觀測量數據輸出 符合R
2021-06-23 16:58:183976 STM32+MPU6050讀取加速度計和陀螺儀原始數據。
2021-12-06 11:51:1111 過程 -------------------------------------------------------------可能有些說明不對的地方,請大家一定要提出來提出來,共同學習 .共同進步.–>>>本文章HAL庫編寫MPU6050輸出六軸原始數據,移植DMP輸出自身姿態角程序鏈接程序鏈接程序鏈接目錄一、mpu6050的通信
2021-12-06 14:36:1410 今日,移遠通信全新雙頻段、多星座、高精度GNSS定位模組LC29H正式面世。該模組利用雙頻定位技術,結合RTK(實時動態載波相位差分)技術和DR(慣性導航技術),滿足厘米級和分米級的高精準定位需求,助力割草機、無人機、智能農機、共享兩輪車等行業應用實現升級體驗。
2022-06-22 11:39:261130 今日,移遠通信全新雙頻段、多星座、高精度GNSS定位模組LC29H正式面世。該模組利用雙頻定位技術,結合RTK(實時動態載波相位差分)技術和DR(慣性導航技術),滿足厘米級和分米級的高精準定位需求,助力割草機、無人機、智能農機、共享兩輪車等行業應用實現升級體驗。
2022-06-22 15:00:261953 6月21日,移遠通信全新雙頻段、多星座、高精度GNSS定位模組LC29H正式面世。該模組利用雙頻定位技術,結合RTK(實時動態載波相位差分)技術和DR(慣性導航技術),滿足厘米級和分米級的高精準
2022-06-22 17:22:061287 電子發燒友網站提供《基于IC MP1584EN的原始數據表布局.zip》資料免費下載
2022-07-29 09:58:010 4G高精度Tracker開發套件中的GNSS定位模組主要采用華大北斗的芯片方案,封裝設計兼容10.1mm*9.7mm與16mm*12.2mm兩個尺寸,可依照實際的需求選用單頻高精度、雙頻高精度、單頻高精度RTK、雙頻高精度RTK、原始觀測量輸出、慣導等性能的模組,可分別滿足精細至厘米級的定位需求。
2022-10-13 10:23:331120 雷達芯片開發與設計的領導者,其量產的汽車級全集成毫米波雷達SoC芯片,為客戶提供高性能和小型化的選擇。在雷達應用的開發前期,采集雷達的原始數據用于算法迭代變得越來
2023-01-14 10:51:531180 
有時候運行的程序只保存了fig文件,而沒有保存原始數據,當需要對fig文件中的數據進行分析和處理時就會犯難了。
2023-07-20 17:30:063557 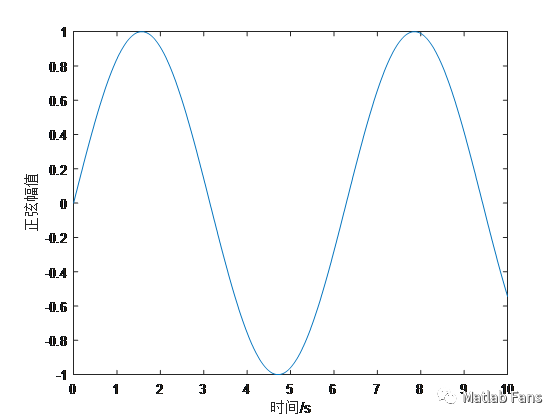
的ClickBoards開發板,為物聯網設備帶來使用簡單、性價比高的厘米級高精定位服務。開發板上搭載的LC29H是一系列雙頻段、多星座GNSS模組,支持同時接收GPS、BDS、G
2023-10-18 08:29:30283 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論