 電子發(fā)燒友App
電子發(fā)燒友App


葛紹強(qiáng),楊永輝,周自維
(遼寧科技大學(xué) 電子信息與工程學(xué)院,遼寧 鞍山 114051)
摘??要:針對(duì)工業(yè)機(jī)器人視覺(jué)領(lǐng)域中現(xiàn)有手眼標(biāo)定方法復(fù)雜的問(wèn)題,提出一種基于3D視覺(jué)的簡(jiǎn)便手眼標(biāo)定方法即將3D深度相機(jī)和礦山爆破機(jī)器人相結(jié)合,利用3D深度相機(jī)能夠獲取空間點(diǎn)坐標(biāo)的原理以及3個(gè)參考點(diǎn)的幾何關(guān)系,獲取標(biāo)定板上參考點(diǎn)到相機(jī)的坐標(biāo)轉(zhuǎn)換關(guān)系。同時(shí)機(jī)器人末端法蘭盤中心到機(jī)器人基坐標(biāo)系的轉(zhuǎn)換關(guān)系已知,可利用 TSAI 兩步法求取相機(jī)到機(jī)器人末端法蘭盤中心的轉(zhuǎn)換關(guān)系,繼而求得參考點(diǎn)在機(jī)器人基坐標(biāo)系中的位姿。把此手眼標(biāo)定方法應(yīng)用到礦山爆破機(jī)器人系統(tǒng)中,實(shí)驗(yàn)結(jié)果表明,最大坐標(biāo)誤差為 5.7 mm,最小誤差為 0 mm,精度滿足現(xiàn)場(chǎng)礦山孔洞的定位要求。該文的創(chuàng)新點(diǎn)是利用深度相機(jī)的原理和 3個(gè)點(diǎn)的幾何關(guān)系求取參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系。
中圖分類號(hào):TN876?34;TP242;TP391.41 ??文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1004?373X(2022)02?0172?05
0 引 言
目前,視覺(jué)工業(yè)機(jī)器人在工業(yè)生產(chǎn)中有很多應(yīng)用,比如機(jī)器人抓取、焊接、噴涂、搬運(yùn)等各個(gè)方面[1]。在工業(yè)機(jī)器人視覺(jué)領(lǐng)域中,手眼標(biāo)定的主要目的是獲取相機(jī)到機(jī)器人末端法蘭盤的轉(zhuǎn)換關(guān)系[2?3],根據(jù)這種轉(zhuǎn)換關(guān)系將空間中點(diǎn)的坐標(biāo)轉(zhuǎn)換到機(jī)器人基坐標(biāo)系下,這樣才能更好地控制機(jī)器人的手臂去完成相應(yīng)的任務(wù),因此手眼標(biāo)定的研究對(duì)于工業(yè)機(jī)器人視覺(jué)有著重大的意義。對(duì)于手眼標(biāo)定的研究,文獻(xiàn)[4]中敘述了手眼標(biāo)定的定義;文獻(xiàn)[5]提出一種相機(jī)標(biāo)定和四點(diǎn)位姿估計(jì)的手眼標(biāo)定方法,但該方法需要進(jìn)行相機(jī)標(biāo)定獲取相機(jī)的外參,即需要獲取標(biāo)定板到相機(jī)的轉(zhuǎn)換關(guān)系;文獻(xiàn)[6]提出一種高精度的手眼標(biāo)定方法,對(duì)標(biāo)定過(guò)程中采集的圖像進(jìn)行校正,提高相機(jī)外參的精度,進(jìn)而進(jìn)行手眼標(biāo)定。文獻(xiàn)[7]提出一種基于ROS的機(jī)器人自動(dòng)手眼標(biāo)定方法,其中利用PnP的方法求解標(biāo)定板到相機(jī)的轉(zhuǎn)換關(guān)系。對(duì)于手眼標(biāo)定復(fù)雜的問(wèn)題,本文根據(jù)深度相機(jī)的原理和棋盤格上的參考點(diǎn)的幾何關(guān)系,求取參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系,再結(jié)合機(jī)器人末端法蘭盤到機(jī)器人基坐標(biāo)系的轉(zhuǎn)換關(guān)系,求解相機(jī)到機(jī)器人末端法蘭盤的轉(zhuǎn)換關(guān)系。
1 礦山爆破機(jī)器人視覺(jué)系統(tǒng)設(shè)計(jì)
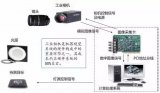
礦山爆破機(jī)器人視覺(jué)系統(tǒng),由六自由度工業(yè)機(jī)器人(KUKA R16?2F)、深度相機(jī) RealsenseD435、機(jī)器人抓取工具組成,采用眼在手上的方式,將深度相機(jī)固定在機(jī)器人末端處,深度相機(jī)隨著機(jī)器人的位姿變換而變化,這種類型的手眼標(biāo)定,相機(jī)的視野更大。礦山爆破機(jī)器人視覺(jué)系統(tǒng)結(jié)構(gòu)圖如圖1所示。
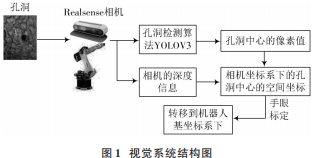
首先,相機(jī)利用深度學(xué)習(xí)算法YOLOV3識(shí)別出礦山中的孔洞,得出孔洞中心點(diǎn)的像素坐標(biāo);然后,結(jié)合深度相機(jī)原理計(jì)算出孔洞中心在相機(jī)坐標(biāo)系下的空間坐標(biāo),隨后結(jié)合手眼標(biāo)定關(guān)系,將孔洞中心的空間坐標(biāo)轉(zhuǎn)換到機(jī)器人基坐標(biāo)系下。 ?
2 手眼標(biāo)定
2.1 手眼標(biāo)定原理介紹
手眼標(biāo)定分為兩種類型:一種是眼在手上的手眼標(biāo)定(Eye?in?Hand);一種是眼在手外的手眼標(biāo)定(Eye?to?Hand)[8]。本文主要敘述眼在手上的手眼標(biāo)定類型,首先對(duì)照下手眼標(biāo)定的示意圖,如圖2所示。Base表示機(jī)器人的基坐標(biāo)系,在機(jī)器人末端法蘭盤上安裝一個(gè)相機(jī)(圖中Center表示法蘭盤的中心,Camera表示的是相機(jī)),在機(jī)器人視野前面固定一個(gè)標(biāo)定板(棋盤格,圖中用Checkerboard表示),棋盤格上的某個(gè)參考點(diǎn)與機(jī)器人基坐標(biāo)的關(guān)系是固定不變的,利用這個(gè)不變的關(guān)系進(jìn)行機(jī)器人的手眼標(biāo)定。
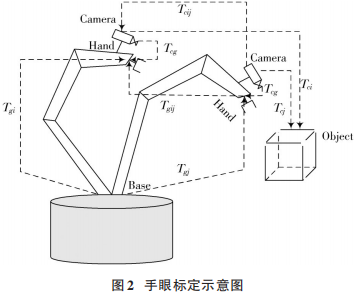
用示教器控制機(jī)器人移動(dòng),讓相機(jī)拍攝棋盤格標(biāo)定板,把此時(shí)的機(jī)器人位姿定義為1,用Tgi 表示機(jī)器人末端法蘭中心到機(jī)器人基坐標(biāo)系下的轉(zhuǎn)換關(guān)系,Tcg表示相機(jī)坐標(biāo)系到機(jī)器人末端法蘭中心的轉(zhuǎn)換關(guān)系(待求,這個(gè)關(guān)系是固定不變的),Tci表示參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系。同樣控制機(jī)器人移動(dòng)到另外一個(gè)位姿下,把此時(shí)的機(jī)器人位姿定義為 2,用 Tgj表示機(jī)器人末端法蘭中心到機(jī)器人基坐標(biāo)下的轉(zhuǎn)換關(guān)系,Tcg仍然是相機(jī)坐標(biāo)系到機(jī)器人法蘭中心的轉(zhuǎn)換關(guān)系,Tcj 表示此時(shí)參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系。Tgij表示位姿1 和位姿2機(jī)器人末端法蘭中心坐標(biāo)系之間的相對(duì)位置的齊次變換矩陣。Tcij表示位姿 1和位姿2下特征點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系的齊次變換矩陣[9]。根據(jù)標(biāo)定板上棋盤格中的某參考點(diǎn)到機(jī)器人基坐標(biāo)系下的轉(zhuǎn)換關(guān)系不變的原則有如下關(guān)系:

首先,對(duì)式(1)兩邊同時(shí)右乘T-1ci ,得:

再對(duì)式(2)兩邊同時(shí)乘T-1gj ,得:

式中:T-1gj Tgi就是表示位姿1和位姿2之間的法蘭中心坐標(biāo)系的齊次變換矩陣Tgij;TcjT-1ci就是表示位姿1和位姿2下參考點(diǎn)到相機(jī)轉(zhuǎn)換關(guān)系的齊次變換矩陣Tcij。得到:

可以令Tgij=A, Tcij=B, Tcg=X,得:

式中,A,B 已知,那么手眼標(biāo)定的問(wèn)題轉(zhuǎn)換成求解AX=XB的問(wèn)題[10?14],求解X利用 TSAI兩步法求解。
2.2 參考點(diǎn)姿態(tài)確定方法 根據(jù)參考點(diǎn)的像素值、深度值和深度相RealsenseD435的SDK函數(shù)rs2_deproject_pixel_to_point(),獲取棋盤格上參考點(diǎn)的空間坐標(biāo),這里參考點(diǎn)選擇3個(gè),且這3個(gè)點(diǎn)構(gòu)成一個(gè)直角三角形,利用直角三角形有兩個(gè)邊相互垂直的原理,可確定角度為90°的參考點(diǎn)姿態(tài)。具體原理如圖3所示。
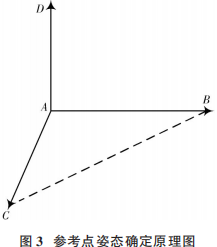
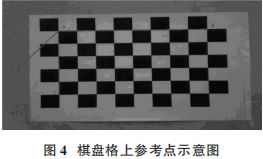
根據(jù)圖3所示,A,B,C 三點(diǎn)構(gòu)成一個(gè)直角三角形,AB和BC兩邊相互垂直,且A,B,C 三點(diǎn)在相機(jī)坐標(biāo)系下的空間由3D相機(jī)原理獲得,根據(jù)A,B兩點(diǎn)的空間坐標(biāo)和A,C 兩點(diǎn)的空間坐標(biāo),可以計(jì)算出向量AB 和向量AC,讓兩個(gè)向量作叉積,即可得向量AD,向量AD與平面ABC垂直;接著讓向量AD與向量AC作叉積運(yùn)算,確保向量AB和平面ACD 垂直;然后分別對(duì)向量AB,向量AC,向量AB作單位化處理,該結(jié)果即是A點(diǎn)的姿態(tài)。棋盤格上的參考點(diǎn)A,B,C三點(diǎn)的示意圖如圖4所示。
已知A點(diǎn)處的姿態(tài)的空間坐標(biāo)(位置)和姿態(tài),就可確定A點(diǎn)的位姿,或者說(shuō)是參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系矩陣。 ?
3 手眼標(biāo)定實(shí)驗(yàn)與分析
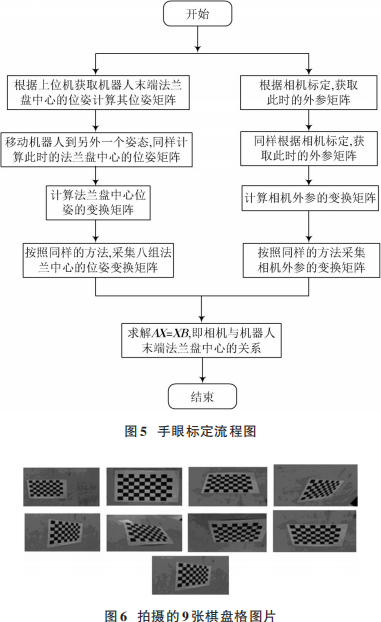
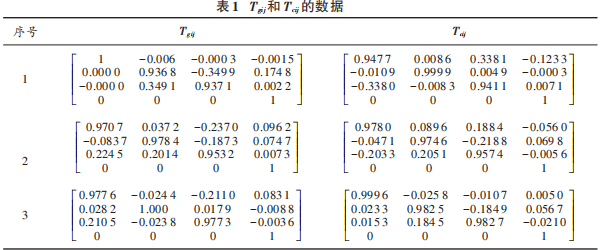
根據(jù)第2節(jié)手眼標(biāo)定的敘述,畫出了整個(gè)手眼標(biāo)定的流程圖,如圖5所示。根據(jù)圖5所示,首先操作機(jī)器人到位姿1處,拍攝棋盤格圖片,根據(jù)特征點(diǎn)的幾何關(guān)系確定點(diǎn)的姿態(tài),姿態(tài)和位置已知,計(jì)算參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系矩陣,同時(shí)計(jì)算機(jī)器人末端到機(jī)器人基坐標(biāo)系的轉(zhuǎn)換關(guān)系矩陣。反復(fù)操作機(jī)器人到9個(gè)不同的位姿處,可以獲得 9張棋盤格圖片、9組參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系和9組機(jī)器人末端到機(jī)器人基坐標(biāo)系下的變換矩陣,8組Tgij和8組Tcij。9張圖片如圖6所示。
取8組Tgij和8組Tcij中的3組數(shù)據(jù)如表1所示。
根據(jù)8組Tgij和8組Tcij數(shù)據(jù),再結(jié)合TSAI兩步法,即可求得相機(jī)到機(jī)器人末端的轉(zhuǎn)換關(guān)系矩陣Tcg ,用Matlab程序進(jìn)行仿真,求Tcg 矩陣和在機(jī)器人基坐標(biāo)系下,參考點(diǎn)與相機(jī)的相對(duì)位置的關(guān)系圖,Tcg如下:

相對(duì)位置關(guān)系如圖7所示。
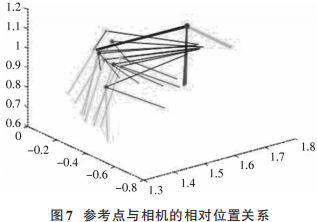
圖7中,分散的點(diǎn)表示相機(jī)的姿態(tài),密集的點(diǎn)表示參考點(diǎn)的姿態(tài)。
利用該標(biāo)定關(guān)系,將棋盤格中參考點(diǎn)的像素坐標(biāo)轉(zhuǎn)換到機(jī)器人基坐標(biāo)系下,參考點(diǎn)坐標(biāo)在機(jī)器人基坐標(biāo)系下的,理論值和實(shí)際值如表2所示。
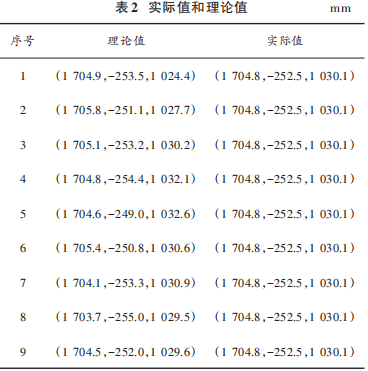
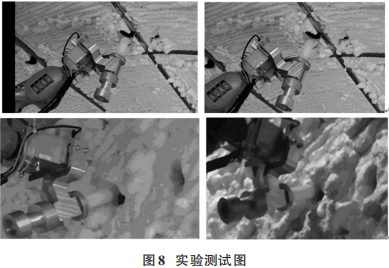
其中,理論值是根據(jù)Tgi*Tcg*Tci關(guān)系求得的,因?yàn)闄C(jī)器人共移動(dòng)9個(gè)位姿,因此理論值有9個(gè),實(shí)際值是根據(jù)控制機(jī)器人末端的法蘭盤移動(dòng)到參考點(diǎn),根據(jù)示教器讀出的該參考點(diǎn)在機(jī)器人基坐標(biāo)系下的坐標(biāo)且都為(1704.8,-252.5,1030.1)。從表中可以看出,其理論值中3個(gè)坐標(biāo)值和實(shí)際值中3個(gè)坐標(biāo)值的誤差最大為5.7mm,最小誤差為0mm。隨后,搭建一個(gè)模擬礦井隧道,孔洞的半徑大約控制在50 mm 左右,控制機(jī)器人工具抓取注藥工具運(yùn)動(dòng)到炮孔中心測(cè)試,每次都能精準(zhǔn)地抓取注藥管運(yùn)送到孔洞中心處,其精度滿足礦山爆破的需求。測(cè)試過(guò)程中的實(shí)驗(yàn)圖如圖8所示。
4 結(jié) 語(yǔ)
本文提出一種基于深度相機(jī)的手眼標(biāo)定方法,該標(biāo)定平臺(tái)利用棋盤格上的特征點(diǎn)幾何關(guān)系,獲取棋盤格上參考點(diǎn)到相機(jī)的轉(zhuǎn)換關(guān)系矩陣,同時(shí)利用示教器讀取的機(jī)器人末端的位姿計(jì)算機(jī)器人末端到機(jī)器人基坐標(biāo)系下的轉(zhuǎn)換矩陣,把這兩個(gè)關(guān)系矩陣與TSAI兩步法結(jié)合,即可求得相機(jī)到機(jī)器人末端法蘭盤的轉(zhuǎn)換關(guān)系。此過(guò)程充分利用深度相機(jī)的原理,不需要對(duì)其求取相機(jī)的外參,過(guò)程簡(jiǎn)便且精度滿足礦山爆破任務(wù)的要求。該標(biāo)定平臺(tái)在其他應(yīng)用工業(yè)機(jī)器人視覺(jué)領(lǐng)域中也有一定的借鑒意義。
注:本文通訊作者為楊永輝。
參 考 文 獻(xiàn)
[1] 田鵬飛,楊樹(shù)明,吳孜越,等 .結(jié)合精度補(bǔ)償?shù)臋C(jī)器人優(yōu)化手眼標(biāo)定方法[J].西安交通大學(xué)學(xué)報(bào),2020(8):99?106.
[2] 王昌云,李立君 . 基于四元數(shù)的機(jī)器人手眼標(biāo)定算法[J]. 傳感器與微系統(tǒng),2019,38(12):133?135.
[3] SHARIFZADEH S,BIRO I,KINNELL P. Robust hand ? eyecalibration of 2D laser sensors using a single ? plane calibrationartefact [J]. Robotics and computer ? integrated manufacturing,2020,61:101823.
[4] WU L,WANG J L,QI L,et al. Simultaneous hand?eye,tool?flange,and robot ? robot calibration for comanipulation bysolving the AXB=YCZ problem [J]. IEEE transactions onrobotics,2016,32(2):413?428.
[5] 吳安成,何衛(wèi)鋒,歐陽(yáng)祥波.基于OpenCV 的碼垛機(jī)器人手眼標(biāo)定方法[J].制造技術(shù)與機(jī)床,2018(6):45?49.
[6] 任杰軒,張旭,劉少麗,等 . 一種高精度機(jī)器人手眼標(biāo)定方法[J].現(xiàn)代制造工程,2020(4):44?51.
[7] 陳寶存,吳巍,郭毓,等 .基于 ROS的機(jī)器人自動(dòng)手眼標(biāo)定系統(tǒng)設(shè)計(jì)[J].計(jì)算機(jī)仿真,2020,37(2):343?348.
[8] 張妍 .工業(yè)機(jī)器人手眼標(biāo)定精度分析研究[D].揚(yáng)州:揚(yáng)州大學(xué),2019.
[9] 何佳唯,平雪良,劉潔,等 .一種機(jī)器人手眼關(guān)系混合標(biāo)定方法[J].應(yīng)用光學(xué),2016,37(2):250?255.
[10] LI H Y,MA Q L,WANG T M,et al. Simultaneous hand?eyeand robot ?world calibration by solving the AX = YB problemwithout correspondence [J]. IEEE robotics and automationletters,2015,1(1):1.
[11] TABB A,YOUSEF K M A. Solving the robot?world hand?eye(s) calibration problem with iterative methods [J]. Machinevision and applications,2017,28(5/6):569?590.
[12] MA Q, LI H, CHIRIKJIAN G S. New probabilisticapproaches to the AX=XB hand ? eye calibration withoutcorrespondence [C]// 2016 IEEE International Conference onRobotics and Automation. Stockholm:IEEE,2016:4365 ?4371.
[13] GROSSMANN B,KRüGER V. Continuous hand?eye calibrationusing 3D points [C]// 2017 IEEE 15th InternationalConference on Industrial Informatics. Germany:IEEE,2017:311?318.
[14] ZENG J,CAO G Z,LI W B,et al. An algorithm of hand?eyecalibration for arc welding robot [C]// 2019 16th InternationalConference on Ubiquitous Robots. Seoul:IEEE,2019:1?6.
作者簡(jiǎn)介:
葛紹強(qiáng)(1994—),男,安徽亳州人,碩士,主要研究方向?yàn)?a target="_blank">計(jì)算機(jī)視覺(jué)與機(jī)器人控制。
楊永輝(1971—),男,遼寧鞍山人,教授,主要研究方向?yàn)橛?jì)算機(jī)視覺(jué)與智能控制。
周自維(1974—),男,遼寧鞍山人,副教授,主要研究方向?yàn)橹悄軝C(jī)器人與計(jì)算機(jī)視覺(jué)。
編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論