 電子發(fā)燒友App
電子發(fā)燒友App


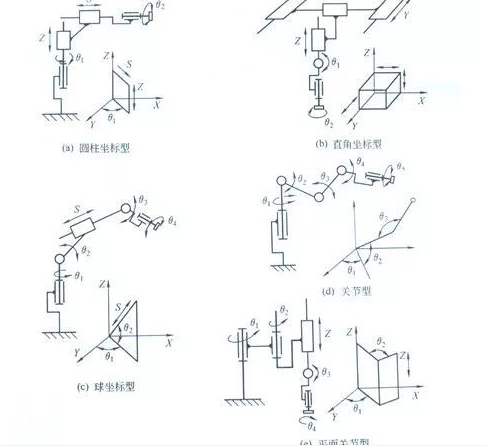
一、概論
現(xiàn)在的機(jī)器人少不了有各種傳感器,傳感器之間的標(biāo)定是機(jī)器人感知環(huán)境的一個(gè)重要前提。所謂標(biāo)定,是指確定傳感器之間的坐標(biāo)轉(zhuǎn)換關(guān)系。由于標(biāo)定的傳感器各異,好像沒(méi)有特別通用的方法。
手眼標(biāo)定法是標(biāo)定攝像頭與機(jī)械臂的一個(gè)經(jīng)典方法,不過(guò)這個(gè)思想也適用于其他傳感器,比如自動(dòng)駕駛中激光雷達(dá)與攝像頭之間的標(biāo)定,比如東京大學(xué)的這篇工作《LiDAR and Camera Calibration using Motion Estimated by Sensor Fusion Odometry》。
手眼標(biāo)定法的核心公式只有一個(gè),? ?,這里的 X 就是指手(機(jī)械臂末端)與眼(攝像頭)之間的坐標(biāo)轉(zhuǎn)換關(guān)系。下面結(jié)合機(jī)械臂的兩種使用場(chǎng)景,講一下這個(gè)公式的由來(lái)。
?,這里的 X 就是指手(機(jī)械臂末端)與眼(攝像頭)之間的坐標(biāo)轉(zhuǎn)換關(guān)系。下面結(jié)合機(jī)械臂的兩種使用場(chǎng)景,講一下這個(gè)公式的由來(lái)。
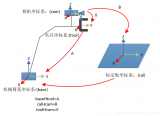
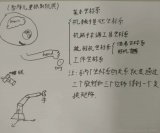
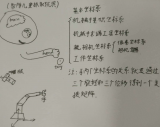
用Base表示機(jī)械臂的底座(可以認(rèn)為是世界坐標(biāo)系),用End表示機(jī)械臂的末端,用Camera表示攝像頭,用Object表示標(biāo)定板。
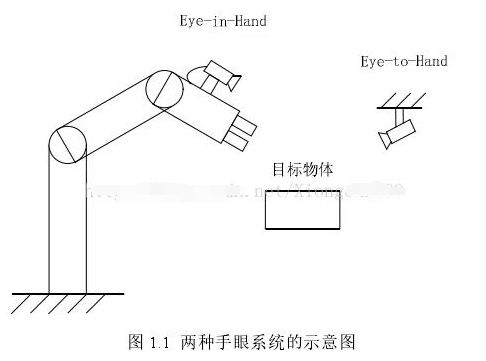
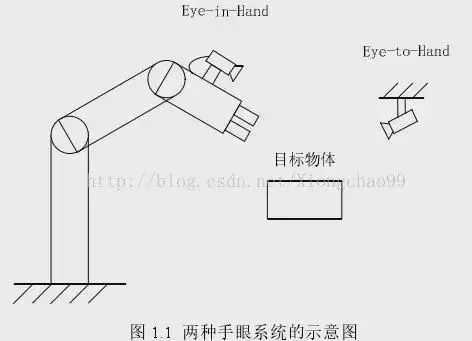
Eye-In-Hand
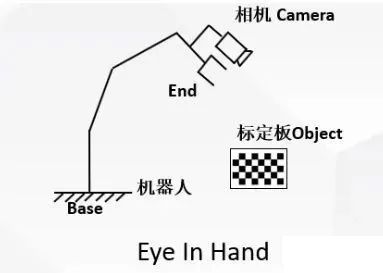
所謂Eye-In-Hand,是指攝像頭被安裝在機(jī)械臂上。此時(shí)要求取的是,End到Camera之間的坐標(biāo)轉(zhuǎn)換關(guān)系,也就是 。這種情況下,有兩個(gè)變量是不變的:
。這種情況下,有兩個(gè)變量是不變的:
攝像頭與機(jī)械臂末端之間的坐標(biāo)轉(zhuǎn)換關(guān)系不變,也就是說(shuō),? ?始終不變;
?始終不變;
標(biāo)定板與機(jī)械臂底座之間的坐標(biāo)轉(zhuǎn)換關(guān)系不變,也就是說(shuō),? ?也是不變的。
?也是不變的。
把按照前后兩次運(yùn)動(dòng)展開(kāi),有

記 
就得到了
也就是,如果能夠計(jì)算移動(dòng)前后,機(jī)械臂末端的坐標(biāo)變換關(guān)系? ?以及相機(jī)的坐標(biāo)變換關(guān)系?
?以及相機(jī)的坐標(biāo)變換關(guān)系? ?,即可求出機(jī)械臂末端到相機(jī)之間的坐標(biāo)變換關(guān)系?
?,即可求出機(jī)械臂末端到相機(jī)之間的坐標(biāo)變換關(guān)系? ?。
?。
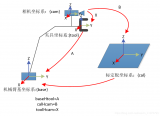
Eye-To-Hand
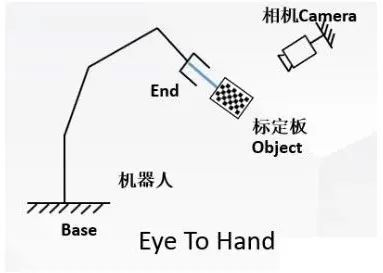
所謂Eye-To-Hand,是指攝像頭被安裝在一個(gè)固定不動(dòng)的位置,而標(biāo)定板被拿在機(jī)械臂手上。此時(shí)要求取的是,Base到Camera之間的坐標(biāo)轉(zhuǎn)換關(guān)系,也就是 。這種情況下,有兩個(gè)變量是不變的:
。這種情況下,有兩個(gè)變量是不變的:
攝像頭與機(jī)械臂底座之間的坐標(biāo)轉(zhuǎn)換關(guān)系不變,也就是說(shuō),??始終不變;
標(biāo)定板與機(jī)械臂末端之間的坐標(biāo)轉(zhuǎn)換關(guān)系不變,也就是說(shuō),??始終不變。
把按照前后兩次運(yùn)動(dòng)展開(kāi),有
記

就得到了
本文主要是講解經(jīng)典手眼標(biāo)定問(wèn)題中的TSAI-LENZ 文獻(xiàn)方法,參考文獻(xiàn)為“A New Technique for Fully Autonomous and Efficient 3D Robotics Hand/Eye Calibration”,并且實(shí)現(xiàn)了基于OpenCV的C++代碼程序
二、Eye in hand 手眼標(biāo)定問(wèn)題
? ? ? ?在機(jī)器人校準(zhǔn)測(cè)量、機(jī)器人手眼協(xié)調(diào)以及機(jī)器人輔助測(cè)量等領(lǐng)域,都要求知道機(jī)器人執(zhí)行器末端(抓取臂)坐標(biāo)系和傳感器(比如用來(lái)測(cè)量三維空間中目標(biāo)位置和方向并固定在機(jī)器人手上的攝像機(jī))坐標(biāo)系之間的相互關(guān)系,確定這種轉(zhuǎn)換關(guān)系在機(jī)器人領(lǐng)域就是通常所說(shuō)的手眼標(biāo)定。
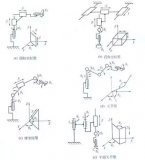
? ? ? ?將手眼標(biāo)定系統(tǒng)如下圖所示,其中Hgi為機(jī)器人執(zhí)行器末端坐標(biāo)系之間相對(duì)位置姿態(tài)的齊次變換矩陣;Hcij為攝像機(jī)坐標(biāo)系之間相對(duì)位置姿態(tài)的齊次變換矩陣;Hcg為像機(jī)與機(jī)器人執(zhí)行器末端之間的相對(duì)位置姿態(tài)齊次矩陣。
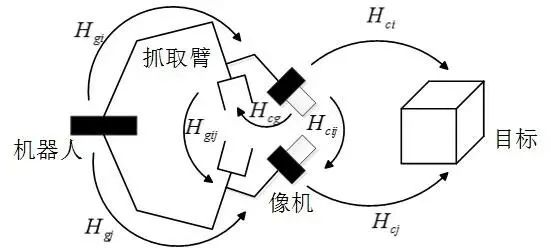
? ? ? ?經(jīng)過(guò)坐標(biāo)系變換,Hgij、Hcij和Hcg滿足上文所述的AX=XB關(guān)系:

? ? ? ?將上式展開(kāi),可以得到手眼標(biāo)定的基本方程:

? ? ? ?因此,手眼標(biāo)定問(wèn)題也就轉(zhuǎn)化為從上述方程組中求解出RcgRcg和TcgTcg,下面就按照TSAI文獻(xiàn)所述求解該方程組。
三、“兩步法”手眼標(biāo)定
? ? ? ?一般用“兩步法”求解基本方程,即先從基本方程上式求解出Rcg,再代入下式求解出Tcg。在TSAI文獻(xiàn)中引入旋轉(zhuǎn)軸-旋轉(zhuǎn)角系統(tǒng)來(lái)描述旋轉(zhuǎn)運(yùn)動(dòng)來(lái)進(jìn)行求解該方程組,具體的公式推導(dǎo)可以查看原始文獻(xiàn),這里只歸納計(jì)算步驟,不明白的地方可閱讀文獻(xiàn),計(jì)算步驟如下:
Step1:利用羅德里格斯變換將旋轉(zhuǎn)矩陣轉(zhuǎn)換為旋轉(zhuǎn)向量
Step2:向量歸一化
Step3:修正的羅德里格斯參數(shù)表示姿態(tài)變化
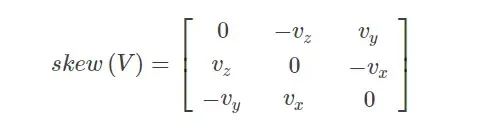
Step4:計(jì)算初始旋轉(zhuǎn)向量P′cg

????其中,skew為反對(duì)稱運(yùn)算,假設(shè)一個(gè)三維向量V=[vx;vy;vz],其反對(duì)稱矩陣為:
Step5:計(jì)算旋轉(zhuǎn)向量Pcg
Step6:計(jì)算旋轉(zhuǎn)矩陣Rcg

Step7:計(jì)算平移向量TcgTcg

根據(jù)上述基本計(jì)算步驟,MATLAB實(shí)現(xiàn)代碼為:
代碼1:tsai函數(shù)(求解AX=XB)
?
function X = tsai(A,B) % Calculates the least squares solution of % AX = XB % % A New Technique for Fully Autonomous % and Efficient 3D Robotics Hand/Eye Calibration % Lenz Tsai % % Mili Shah % July 2014 [m,n] = size(A); n = n/4; S = zeros(3*n,3); v = zeros(3*n,1); %Calculate best rotation R for i = 1:n A1 = logm(A(1:3,4*i-3:4*i-1)); B1 = logm(B(1:3,4*i-3:4*i-1)); a = [A1(3,2) A1(1,3) A1(2,1)]'; a = a/norm(a); b = [B1(3,2) B1(1,3) B1(2,1)]'; b = b/norm(b); S(3*i-2:3*i,:) = skew(a+b); v(3*i-2:3*i,:) = a-b; end x = Sv; theta = 2*atan(norm(x)); x = x/norm(x); R = (eye(3)*cos(theta) + sin(theta)*skew(x) + (1-cos(theta))*x*x')'; %Calculate best translation t C = zeros(3*n,3); d = zeros(3*n,1); I = eye(3); for i = 1:n C(3*i-2:3*i,:) = I - A(1:3,4*i-3:4*i-1); d(3*i-2:3*i,:) = A(1:3,4*i)-R*B(1:3,4*i); end t = Cd; %Put everything together to form X X = [R t;0 0 0 1];
?
代碼2:skew函數(shù)(求向量反對(duì)稱矩陣)
?
function Sk = skew( x ) %SKEW 此處顯示有關(guān)此函數(shù)的摘要 % 此處顯示詳細(xì)說(shuō)明 Sk = [0,-x(3),x(2);x(3),0,-x(1);-x(2),x(1),0]; end
?
代碼3:計(jì)算手眼矩陣Tm
?
clc clear close all %%%%%%%%%%%%%%%%%%%%%%% T6矩陣參數(shù)%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%位姿1的時(shí)候機(jī)器人末端相對(duì)于機(jī)器人基坐標(biāo)系下變換矩陣 Pose1=[1141.243,-15.261,-97.721,178.91,0.47,92.37]; Px = Pose1(1); Py = Pose1(2); Pz = Pose1(3); rota = Pose1(4)*pi/180; rotb = Pose1(5)*pi/180; rotc = Pose1(6)*pi/180; Rx = [1 0 0; 0 cos(rota) -sin(rota); 0 sin(rota) cos(rota)]; Ry = [cos(rotb) 0 sin(rotb); 0 1 0; -sin(rotb) 0 cos(rotb)]; Rz = [cos(rotc) -sin(rotc) 0; sin(rotc) cos(rotc) 0; 0 0 1]; R1 = Rz*Ry*Rx; T1= [Px Py Pz]'; %%%%%%%%%%位姿2的時(shí)候機(jī)器人末端相對(duì)于機(jī)器人基坐標(biāo)系下變換矩陣 Pose2=[1103.946,-163.910,-107.673,-160.90,-0.14,-91.62]; Px = Pose2(1); Py = Pose2(2); Pz = Pose2(3); rota = Pose2(4)*pi/180; rotb = Pose2(5)*pi/180; rotc = Pose2(6)*pi/180; Rx = [1 0 0; 0 cos(rota) -sin(rota); 0 sin(rota) cos(rota)]; Ry = [cos(rotb) 0 sin(rotb); 0 1 0; -sin(rotb) 0 cos(rotb)]; Rz = [cos(rotc) -sin(rotc) 0; sin(rotc) cos(rotc) 0; 0 0 1]; R2 = Rz*Ry*Rx; T2= [Px Py Pz]'; %%%%%%%%%%位姿3的時(shí)候機(jī)器人末端相對(duì)于機(jī)器人基坐標(biāo)系下變換矩陣 Pose3=[1073.714,2.669,-142.448,-142.86,0.84,-178.55]; Px = Pose3(1); Py = Pose3(2); Pz = Pose3(3); rota = Pose3(4)*pi/180; rotb = Pose3(5)*pi/180; rotc = Pose3(6)*pi/180; Rx = [1 0 0; 0 cos(rota) -sin(rota); 0 sin(rota) cos(rota)]; Ry = [cos(rotb) 0 sin(rotb); 0 1 0; -sin(rotb) 0 cos(rotb)]; Rz = [cos(rotc) -sin(rotc) 0; sin(rotc) cos(rotc) 0; 0 0 1]; R3 = Rz*Ry*Rx; T3= [Px Py Pz]'; %%%%%%%%%位姿1,2,3時(shí)候機(jī)器人末端相對(duì)于機(jī)器人基坐標(biāo)系下變換矩陣 T61=[R1 T1;0 0 0 1] ; T62=[R2 T2;0 0 0 1]; T63=[R3 T3;0 0 0 1]; %%%%%%攝像機(jī)外參數(shù)矩陣(平面靶標(biāo)在攝像機(jī)坐標(biāo)系下表示)%%%%%%%% Extrinsic1=[0.051678,-0.998634,0.007660,21.747985; -0.998617,-0.051600,0.010060,27.391246; -0.009651,-0.008169,-0.999920,319.071378];%%%3行4列矩陣 Extrinsic2=[0.014949,0.999738,0.017361,-35.869608 0.949779,-0.019626,0.312304,-20.701811 0.312563,0.011821,-0.949823,306.463155]; Extrinsic3=[0.999176,0.039246,0.010343,-26.361812 0.025037,-0.796606,0.603980,20.533884 0.031943,-0.603223,-0.796933,318.110756]; %%%%%%% TC1=[Extrinsic1; 0 0 0 1]; TC2=[Extrinsic2; 0 0 0 1]; TC3=[Extrinsic3; 0 0 0 1]; TL1=inv(T61)*T62; TL2=inv(T62)*T63; TR1=TC1*inv(TC2); TR2=TC2*inv(TC3); A=[TL1,TL2] B=[TR1,TR2] X=?tsai(A,B)
?
結(jié)果如下:
?
A =
-0.9976 0.0676 -0.0173 -146.8929 0.0535 -0.7980 0.6003 -165.7422
-0.0697 -0.9488 0.3082 -43.6165 0.9483 0.2289 0.2197 44.2528
0.0044 0.3087 0.9512 10.3295 -0.3127 0.5575 0.7690 21.0485
0 0 0 1.0000 0 0 0 1.0000
B =
-0.9975 0.0711 -0.0029 -11.6622 0.0544 -0.7855 -0.6164 177.7842
-0.0663 -0.9443 -0.3223 104.2345 0.9515 0.2280 -0.2067 65.4536
-0.0257 -0.3213 0.9466 21.3907 0.3029 -0.5753 0.7598 84.5619
0 0 0 1.0000 0 0 0 1.0000
X =
-0.9998 0.0187 -0.0076 -78.8694
-0.0187 -0.9998 -0.0073 14.2711
-0.0078 -0.0071 0.9999 -124.6709
0 0 0 1.0000
?
五、C++算法源代碼
在利用OpenCV 2.0開(kāi)源庫(kù)的基礎(chǔ)上,編寫(xiě)Tsai手眼標(biāo)定方法的c++程序,其實(shí)現(xiàn)函數(shù)代碼如下:
代碼1:Tsai_HandEye函數(shù),求解AX=XB
?
void Tsai_HandEye(Mat Hcg, vectorHgij, vector Hcij) { CV_Assert(Hgij.size() == Hcij.size()); int nStatus = Hgij.size(); Mat Rgij(3, 3, CV_64FC1); Mat Rcij(3, 3, CV_64FC1); Mat rgij(3, 1, CV_64FC1); Mat rcij(3, 1, CV_64FC1); double theta_gij; double theta_cij; Mat rngij(3, 1, CV_64FC1); Mat rncij(3, 1, CV_64FC1); Mat Pgij(3, 1, CV_64FC1); Mat Pcij(3, 1, CV_64FC1); Mat tempA(3, 3, CV_64FC1); Mat tempb(3, 1, CV_64FC1); Mat A; Mat b; Mat pinA; Mat Pcg_prime(3, 1, CV_64FC1); Mat Pcg(3, 1, CV_64FC1); Mat PcgTrs(1, 3, CV_64FC1); Mat Rcg(3, 3, CV_64FC1); Mat eyeM = Mat::eye(3, 3, CV_64FC1); Mat Tgij(3, 1, CV_64FC1); Mat Tcij(3, 1, CV_64FC1); Mat tempAA(3, 3, CV_64FC1); Mat tempbb(3, 1, CV_64FC1); Mat AA; Mat bb; Mat pinAA; Mat Tcg(3, 1, CV_64FC1); for (int i = 0; i < nStatus; i++) { Hgij[i](Rect(0, 0, 3, 3)).copyTo(Rgij); Hcij[i](Rect(0, 0, 3, 3)).copyTo(Rcij); Rodrigues(Rgij, rgij); Rodrigues(Rcij, rcij); theta_gij = norm(rgij); theta_cij = norm(rcij); rngij = rgij / theta_gij; rncij = rcij / theta_cij; Pgij = 2 * sin(theta_gij / 2)*rngij; Pcij = 2 * sin(theta_cij / 2)*rncij; tempA = skew(Pgij + Pcij); tempb = Pcij - Pgij; A.push_back(tempA); b.push_back(tempb); } //Compute rotation invert(A, pinA, DECOMP_SVD); Pcg_prime = pinA * b; Pcg = 2 * Pcg_prime / sqrt(1 + norm(Pcg_prime) * norm(Pcg_prime)); PcgTrs = Pcg.t(); Rcg = (1 - norm(Pcg) * norm(Pcg) / 2) * eyeM + 0.5 * (Pcg * PcgTrs + sqrt(4 - norm(Pcg)*norm(Pcg))*skew(Pcg)); //Computer Translation for (int i = 0; i < nStatus; i++) { Hgij[i](Rect(0, 0, 3, 3)).copyTo(Rgij); Hcij[i](Rect(0, 0, 3, 3)).copyTo(Rcij); Hgij[i](Rect(3, 0, 1, 3)).copyTo(Tgij); Hcij[i](Rect(3, 0, 1, 3)).copyTo(Tcij); tempAA = Rgij - eyeM; tempbb = Rcg * Tcij - Tgij; AA.push_back(tempAA); bb.push_back(tempbb); } invert(AA, pinAA, DECOMP_SVD); Tcg = pinAA * bb; Rcg.copyTo(Hcg(Rect(0, 0, 3, 3))); Tcg.copyTo(Hcg(Rect(3, 0, 1, 3))); Hcg.at (3, 0) = 0.0; Hcg.at (3, 1) = 0.0; Hcg.at (3, 2) = 0.0; ??Hcg.at (3,?3)?=?1.0; }
?
代碼2:skew函數(shù)(將3x1向量轉(zhuǎn)換成3x3反對(duì)稱矩陣)
?
Mat skew(Mat A)
{
CV_Assert(A.cols == 1 && A.rows == 3);
Mat B(3, 3, CV_64FC1);
B.at(0, 0) = 0.0;
B.at(0, 1) = -A.at(2, 0);
B.at(0, 2) = A.at(1, 0);
B.at(1, 0) = A.at(2, 0);
B.at(1, 1) = 0.0;
B.at(1, 2) = -A.at(0, 0);
B.at(2, 0) = -A.at(1, 0);
B.at(2, 1) = A.at(0, 0);
B.at(2, 2) = 0.0;
return B;
}
?
代碼3:計(jì)算手眼矩陣Tm
?
#include??//頭文件 #include #include #include using namespace std; using namespace cv; //包含cv命名空間 int?main() { double a1[4][4] = { -0.9976,0.0676, - 0.0173, - 146.8929, -0.0697 ,- 0.9488 , 0.3082 ,- 43.6165, 0.0044 , 0.3087, 0.9512 , 10.3295, 0 , 0 , 0 , 1.0000 }; double a2[4][4] = { 0.0535, - 0.7980, 0.6003 ,-165.7422, 0.9483 , 0.2289, 0.2197, 44.2528, -0.3127,0.5575,0.7690, 21.0485, 0, 0, 0, 1 }; double b1[4][4] = { -0.9975, 0.0711, - 0.0029 ,- 11.6622, -0.0663, - 0.9443, - 0.3223, 104.2345, -0.0257, - 0.3213, 0.9466 , 21.3907, 0, 0, 0, 1 }; double b2[4][4] = { 0.0544, - 0.7855, - 0.6164, 177.7842, 0.9515, 0.2280 ,- 0.2067, 65.4536, 0.3029, - 0.5753, 0.7598 , 84.5619, 0, 0, 0, 1 }; Mat A1(4, 4, CV_64FC1, a1); Mat A2(4, 4, CV_64FC1, a2); Mat B1(4, 4, CV_64FC1, b1); Mat B2(4, 4, CV_64FC1, b2); vector Hgij; vector Hcij; Hgij.push_back(A1); Hgij.push_back(A2); Hcij.push_back(B1); Hcij.push_back(B2); Mat Hcg1(4, 4, CV_64FC1); Tsai_HandEye(Hcg1, Hgij, Hcij); }
?
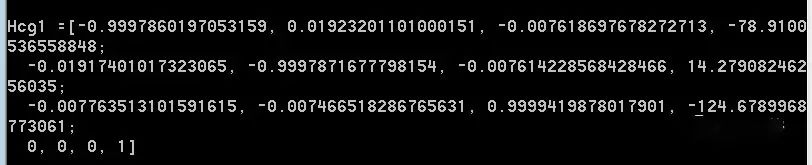
輸出結(jié)果如下:
?
審核編輯:湯梓紅



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論