 電子發(fā)燒友App
電子發(fā)燒友App


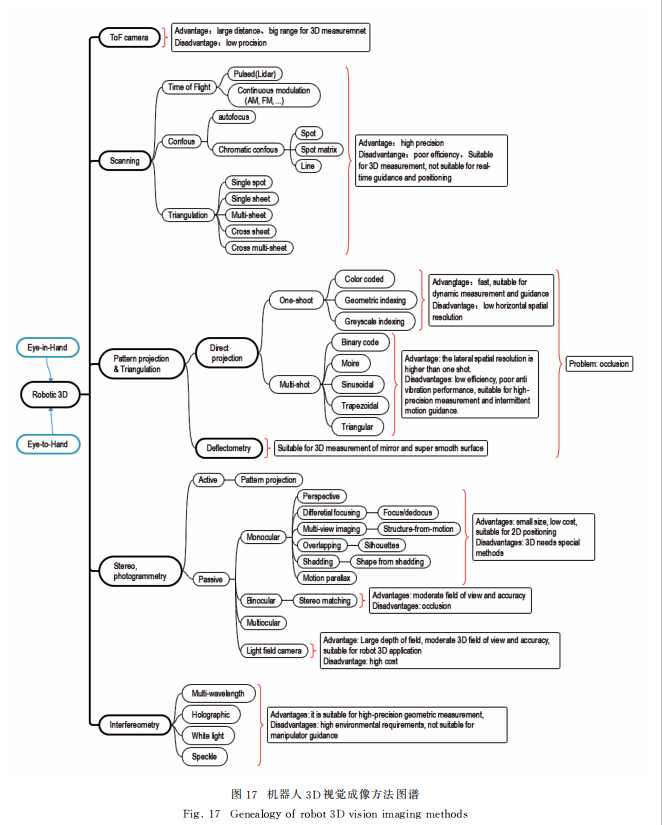
3D視覺成像是工業(yè)機(jī)器人信息感知的一種最重要的方法,可分為光學(xué)和非光學(xué)成像方法。目前應(yīng)用最多的還是光學(xué)方法,包括:飛行時(shí)間法、結(jié)構(gòu)光法、激光掃描法、莫爾條紋法、激光散斑法、干涉法、照相測量法、激光跟蹤法、從運(yùn)動(dòng)獲得形狀、從陰影獲得形狀,以及其他的 Shape from X等。本次介紹幾種典型方案。
節(jié)選于盧榮勝,史艷瓊,胡海兵《機(jī)器人視覺三維成像技術(shù)綜述》一文。??
飛行時(shí)間3D成像
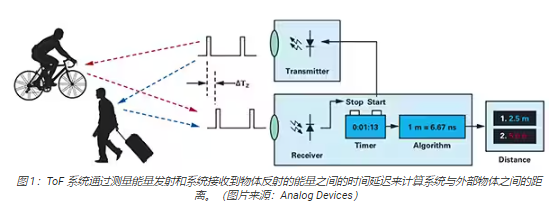
飛行時(shí)間(TOF)相機(jī)每個(gè)像素利用光飛行的時(shí)間差來獲取物體的深度。
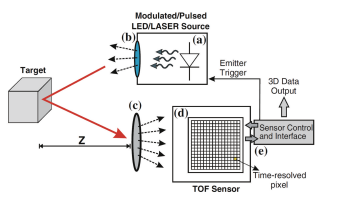
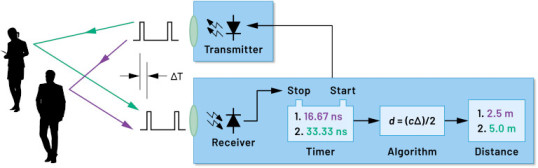
在經(jīng)典的TOF測量方法中,探測器系統(tǒng)在發(fā)射光脈沖的同時(shí)啟動(dòng)探測接收單元進(jìn)行計(jì)時(shí),當(dāng)探測器接收到目標(biāo)發(fā)出的光回波時(shí),探測器直接存儲(chǔ)往返時(shí)間。目標(biāo)距離Z可通過以下簡單方程估算:
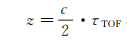
這種測距方式也稱為直接TOF(DTOF)。D-TOF通常用于單點(diǎn)測距系統(tǒng),為了實(shí)現(xiàn)面積范圍3D成像,通常需要采用掃描技術(shù)。
無掃描TOF三維成像技術(shù)直到近幾年才實(shí)現(xiàn),因?yàn)樵谙袼丶?jí)實(shí)現(xiàn)亞納秒電子計(jì)時(shí)是非常困難的。
與直接計(jì)時(shí)的D-TOF不同的方案是間接TOF(I-TOF),時(shí)間往返行程是從光強(qiáng)度的時(shí)間選通測量中間接外推獲得。I-TOF不需要精確的計(jì)時(shí),而是采用時(shí)間選通光子計(jì)數(shù)器或電荷積分器,它們可以在像素級(jí)實(shí)現(xiàn)。I-TOF是目前基于TOF相機(jī)的電子和光混合器的商用化解決方案。
TOF成像可用于大視野、遠(yuǎn)距離、低精度、低成 本的3D圖像采集。其特點(diǎn)是:檢測速度快、視野范 圍較大、工作距離遠(yuǎn)、價(jià)格便宜,但精度低,易受環(huán)境光的干擾。
掃描3D成像
掃描3D成像方法可分為掃描測距、主動(dòng)三角法、色散共焦法等。其實(shí),色散共焦法是掃描測距法的一種,考慮到目前在手機(jī)、平板顯示等制造行業(yè)應(yīng)用比較廣泛,在此單獨(dú)介紹。
1、掃描測距
掃描測距是利用一條準(zhǔn)直光束通過一維測距掃描整個(gè)目標(biāo)表面實(shí)現(xiàn)3D測量。典型掃描測距方法有:
1、單點(diǎn)飛行時(shí)間法,如連續(xù)波頻率調(diào)制(FM-CW)測距、脈沖測距(激光雷達(dá))等;
2、激光散射干涉法,如基于多波長干涉、全息干涉、白光干涉散斑干涉等原理的干涉儀;
3、共焦法,如色散共焦、自聚焦等。
單點(diǎn)測距掃描3D方法中,單點(diǎn)飛行時(shí)間法適合遠(yuǎn)距離掃描,測量精度較低,一般在毫米量級(jí)。
其他幾種單點(diǎn)掃描方法有:單點(diǎn)激光干涉法、共焦法和單點(diǎn)激光主動(dòng)三角法,測量精度較高,但前者對(duì)環(huán)境要求高;線掃描精度適中,效率高。
比較適合于機(jī)械手臂末端執(zhí)行3D測量的應(yīng)是主動(dòng)激光三角法和色散共焦法。
2、主動(dòng)三角法
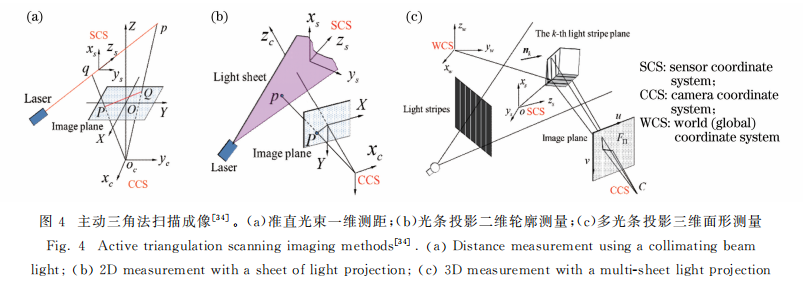
主動(dòng)三角法是基于三角測量原理,利用準(zhǔn)直光束、一條或多條平面光束掃描目標(biāo)表面完成3D測 量的。
光束常采用以下方式獲得:激光準(zhǔn)直、圓柱或 二次曲面柱形棱角擴(kuò)束,非相干光(如白光、LED 光 源)通過小孔、狹縫(光柵)投影或相干光衍射等。
主動(dòng)三角法可分為三種類型:單點(diǎn)掃描、單線掃描和多線掃描。目前商業(yè)化的用于機(jī)械手臂末端的產(chǎn)品大多數(shù)是單點(diǎn)和單線掃描儀
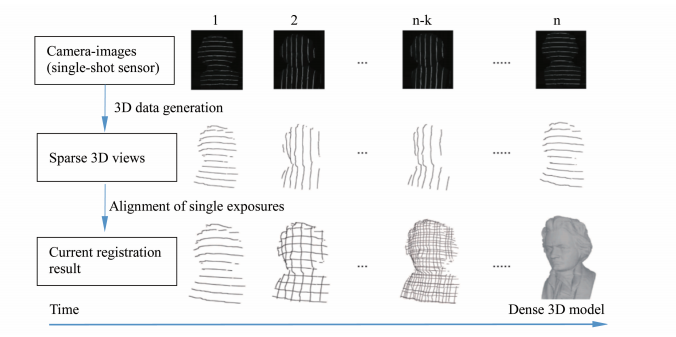
在多線掃描方法中,條紋極數(shù)可靠識(shí)別是難點(diǎn)。為 了準(zhǔn)確識(shí)別條紋編號(hào),通常采用兩組垂直光平面高 速交替成像,這樣還可以實(shí)現(xiàn)“FlyingTriangulation” 掃描,其掃描與三維重構(gòu)過程如下圖所示。多線條投影一次頻閃成像產(chǎn)生一幅稀疏3D視圖, 通過縱橫向條紋投影掃描生成若干幅3D視圖序列,再通過三 維圖像準(zhǔn)配生成高分辨率的完整致密的三維曲面模型。
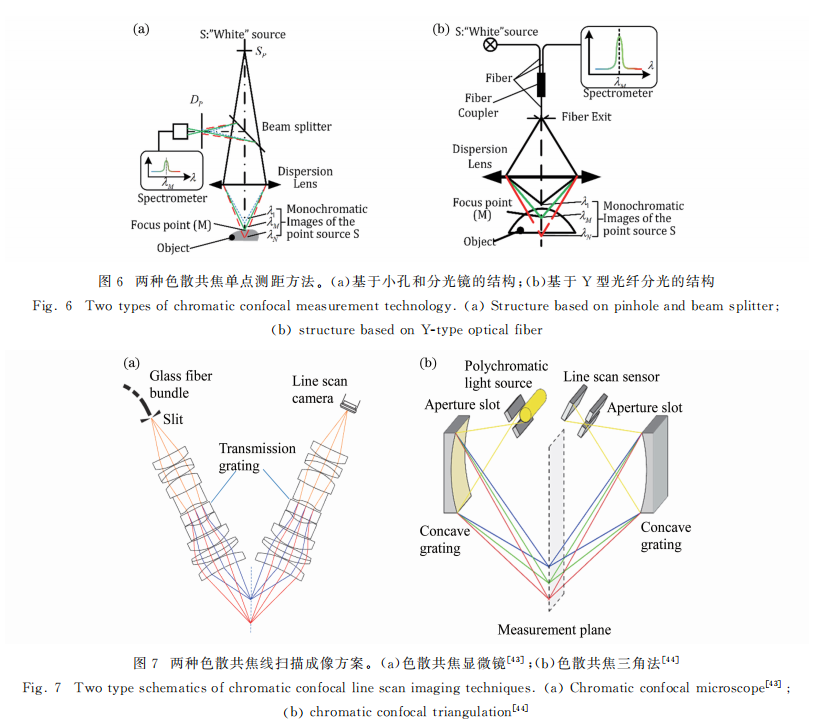
3、色散共焦法
色散共焦似乎可以掃描測量粗糙和光滑的不透明和透明物體,如反射鏡面、透明玻璃面等,目前在手機(jī)蓋板三維檢測等領(lǐng)域廣受歡迎。
色散共焦掃描有三種類型:單點(diǎn)一維絕對(duì)測距掃描、多點(diǎn)陣列掃描和連續(xù)線掃描,下圖分別列出了絕對(duì)測距和連續(xù)線掃描兩類示例,其中連續(xù)線掃描也是一種陣列掃描,只是陣列的點(diǎn)陣更多、更密集。
在商業(yè)產(chǎn)品上,目前較為知名的掃描光譜共焦傳感器是法國的 STIL MPLS180,采用180個(gè)陣列點(diǎn)形成一條線,最大線長4.039mm(測量點(diǎn)11.5pm,點(diǎn)與點(diǎn)間距為22.5pm),另一款產(chǎn)品是芬蘭的 FOCALSPEC UULA,采用的是色散共焦三角法技術(shù)
結(jié)構(gòu)光投影3D成像
結(jié)構(gòu)光投影三維成像目前是機(jī)器人3D視覺感知的主要方式,結(jié)構(gòu)光成像系統(tǒng)是由若干個(gè)投影儀和相機(jī)組成,常用的結(jié)構(gòu)形式有:單投影儀-單相機(jī)、單投影儀-雙相機(jī)、單投影儀-多相機(jī)、單相機(jī)-雙投影儀和單相機(jī)-多投影儀等典型結(jié)構(gòu)形式。
結(jié)構(gòu)光投影三維成像的基本工作原理是:投影儀向目標(biāo)物體投射特定的結(jié)構(gòu)光照明圖案,由相機(jī)攝取被目標(biāo)調(diào)制后的圖像,再通過圖像處理和視覺模型求出目標(biāo)物體的三維信息。
常用的投影儀主要有下列幾種類型:液晶投影(LCD)、數(shù)字光調(diào)制投影(DLP,如數(shù)字微鏡器件(DMD)、激光LED圖案直接投影
根據(jù)結(jié)構(gòu)光投影次數(shù)劃分,結(jié)構(gòu)光投影三維成像可以分成單次投影3D和多次投影3D方法。
1、單次投影成像
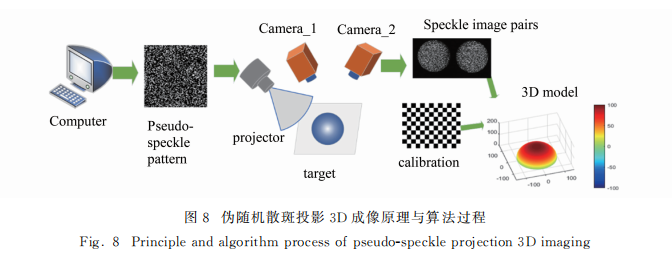
單次投影結(jié)構(gòu)光主要采用空間復(fù)用編碼和頻率復(fù)用編碼形式實(shí)現(xiàn),常用的編碼形式有:彩色編碼、灰度索引、幾何形狀編碼和隨機(jī)斑點(diǎn)。
目前在機(jī)器人手眼系統(tǒng)應(yīng)用中,對(duì)于三維測量精度要求不高的場合,如碼垛、拆垛、三維抓取等,比較受歡迎的是投射偽隨機(jī)斑點(diǎn)獲得目標(biāo)三維信息,其3D成像原理如下圖所示。
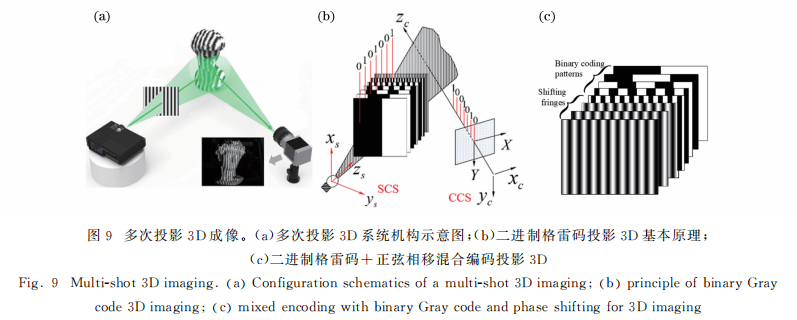
2、多次投影成像
多次投影3D方法主要采用時(shí)間復(fù)用編碼方式實(shí)現(xiàn),常用的圖案編碼形式有:二進(jìn)制編碼、多頻相移編碼τ35和混合編碼法(如格雷碼十相移條紋)等。
條紋投影3D成像基本原理如下圖所示,利用計(jì)算機(jī)生成結(jié)構(gòu)光圖案或用特殊的光學(xué)裝置產(chǎn)生結(jié)構(gòu)光,經(jīng)過光學(xué)投影系統(tǒng)投射至被測物體表面,然后采用圖像獲取設(shè)備(如CCD或CMOS相機(jī))采集被物體表面調(diào)制后發(fā)生變形的結(jié)構(gòu)光圖像,利用圖像處理算法計(jì)算圖像中每個(gè)像素點(diǎn)與物體輪廓上點(diǎn)的對(duì)應(yīng)關(guān)系;最后通過系統(tǒng)結(jié)構(gòu)模型及其標(biāo)定技術(shù),計(jì)算得到被測物體的三維輪廓信息。
在實(shí)際應(yīng)用中,常采用格雷碼投影、正弦相移條紋投影或格雷碼十正弦相移混合投影3D技術(shù)。
3、偏折法成像
對(duì)于粗糙表面,結(jié)構(gòu)光可以直接投射到物體表面進(jìn)行視覺成像測量;但對(duì)于大反射率光滑表面和鏡面物體3D測量,結(jié)構(gòu)光投影不能直接投射到被測則表面,3D測量還需要借助鏡面偏折技術(shù),如下圖所示。
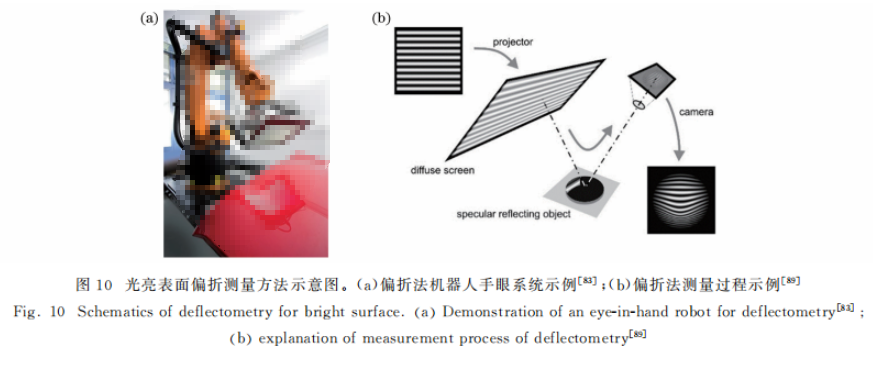
在這種方案中,條紋不是直接投影到被測則輪廓上,而是投射到一個(gè)散射屏上,或用液晶顯示屏代替散射屏把條紋直接顯示出來。相機(jī)通過光亮表面折返光路,獲取被光亮表面曲率變化調(diào)制的條紋信息,然后解算出三維輪廓形貌。
立體視覺3D成像
立體視覺字面意思是用一只眼睛或兩只眼睛感知三維結(jié)構(gòu),一般情況下是指從不同的視點(diǎn)獲取兩幅或多幅圖像重構(gòu)目標(biāo)物體3D結(jié)構(gòu)或深度信息。
深度感知視覺線索可分為ocular cues和 Binocular cues(雙目視差)。目前立體視覺3D可以通過單目視覺、雙目視覺、多(目)視覺、光場3D成像(電子復(fù)眼或陣列相機(jī))實(shí)現(xiàn)。
1、單目視覺成像
單目視覺深度感知線索通常有:透視、焦距差異、多視覺成像、覆蓋、陰影、運(yùn)動(dòng)視差等。在機(jī)器人視覺里還可以用鏡像1,以及其他 shape from X10等方法實(shí)現(xiàn)。
2、雙目視覺成像
雙目視覺深度感知視覺線索有:眼睛的收斂位置和雙目視差。在機(jī)器視覺里利用兩個(gè)相機(jī)從兩個(gè)視點(diǎn)對(duì)同一個(gè)目標(biāo)場景獲取兩個(gè)視點(diǎn)圖像再計(jì)算兩個(gè)視點(diǎn)圖像中同名點(diǎn)的視差獲得目標(biāo)場景的3D深度信息。
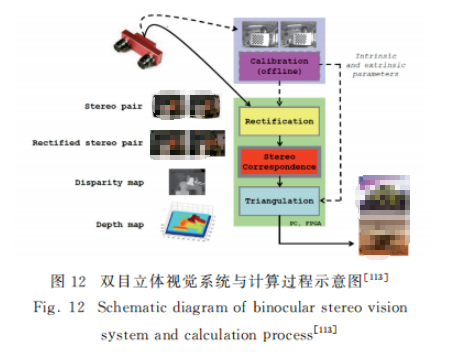
典型的雙目立體視覺計(jì)算過程包含下面四個(gè)步驟:圖像畸變矯正、立體圖像對(duì)校正、圖像配準(zhǔn)和三角法重投影視差圖計(jì)算,如下圖。
3、多(目)視覺成像
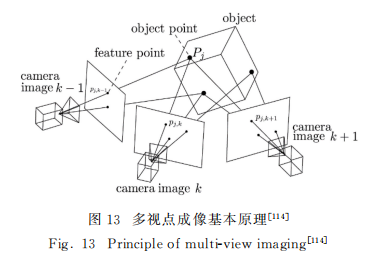
也稱多視點(diǎn)立體成像,用單個(gè)或多個(gè)相機(jī)從多個(gè)視點(diǎn)獲取同一個(gè)目標(biāo)場景的多幅圖像,重構(gòu)目標(biāo)場景的三維信息。其基本原理如下圖所示。
多視點(diǎn)立體成像主要用于下列幾種場景:
1)使用多個(gè)相機(jī)從不同視點(diǎn),獲取同一個(gè)目標(biāo)
場景多幅圖像,然后基于特征的立體重構(gòu)等算法求取場景深度和空間結(jié)構(gòu)信息
2)從運(yùn)動(dòng)恢復(fù)形狀(SM)的技術(shù)。使用同一相機(jī)在其內(nèi)參數(shù)不變的條件下,從不同視點(diǎn)獲取多幅圖像,重構(gòu)目標(biāo)場景的三維信息。該技術(shù)常用于跟蹤目標(biāo)場景中大量的控制點(diǎn),連續(xù)恢復(fù)場景的3D結(jié)構(gòu)信息、相機(jī)的姿態(tài)和位置。
4、光場成像
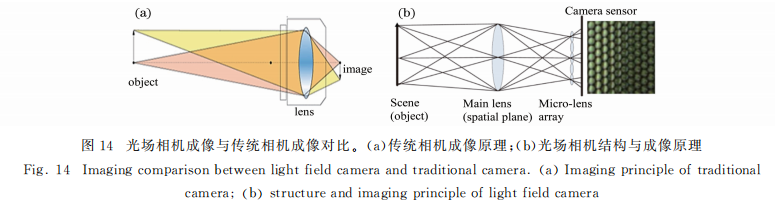
光場3D成像的原理與傳統(tǒng)CCD和CMOS相機(jī)成像原理在結(jié)構(gòu)原理上有所差異,傳統(tǒng)相機(jī)成像是光線穿過鏡頭在后續(xù)的成像平面上直接成像,一般是2D圖像。
光場相機(jī)成像是在傳感器平面前增加了一個(gè)微透鏡陣列,將經(jīng)過主鏡頭入射的光線再次穿過每個(gè)微透鏡,由感光陣列接收,從而獲得光線的方向與位置信息,使成像結(jié)果可在后期處理,達(dá)到先拍照,后聚焦的效果,如下圖所示。
機(jī)器人視覺3D成像方法比較
(1)類似于ToF相機(jī)、光場相機(jī)這類相機(jī),可以歸類為單相機(jī)3D成像范圍,它們體積小,實(shí)時(shí)性好,適合Eye-in-Hand系統(tǒng)執(zhí)行3D測量、定位和實(shí)時(shí)引導(dǎo)。
但是,ToF相機(jī)、光場相機(jī)短期內(nèi)還難以用來構(gòu)建普通的Eye- inHand系統(tǒng),主要原因如下:
①ToF相機(jī)空間分辨率和3D精度低,不適合高精度測量、定位與引導(dǎo)。
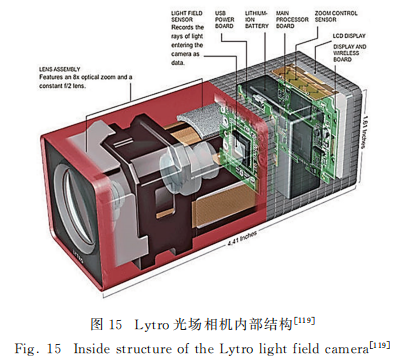
②對(duì)于光場相機(jī),目前商業(yè)化的工業(yè)級(jí)產(chǎn)品只有德國 Raytrix一家,雖然性能較好,空間分率和精度適中,但價(jià)格太貴,一臺(tái)幾十萬元,使用成本太高
(2)結(jié)構(gòu)光投影3D系統(tǒng),精度和成本適中,有相當(dāng)好的應(yīng)用市場前景。它由若干個(gè)相機(jī)-投影儀組成,如果把投影儀當(dāng)作一個(gè)逆向的相機(jī),可以認(rèn)為該系統(tǒng)是一個(gè)雙目或多目3D三角測量系統(tǒng)。
(3)被動(dòng)立體視覺3D成像,日前在工業(yè)領(lǐng)域也得到較好應(yīng)用,但應(yīng)用場合有限。因?yàn)閱文苛Ⅲw視覺實(shí)現(xiàn)有難度,雙目和多目立體視覺要求目標(biāo)物體紋理或幾何特征清晰。
(4)結(jié)構(gòu)光投影3D、雙目立體視覺3D都存在下列缺點(diǎn):體積較大,容易產(chǎn)生遮擋。因?yàn)檫@幾種方法都是基于三角測量原理,要求相機(jī)和投影儀之間或雙目立體兩個(gè)相機(jī)之間必須間隔一定距離,并且存在一定的夾角θ(通常大于15°)才能實(shí)現(xiàn)測量。
如果減小相機(jī)與投影儀(結(jié)構(gòu)光光源)的夾角,雖然在某些程度上可以解決問題,但是卻會(huì)嚴(yán)重降低系統(tǒng)的測量靈敏度,影響該測量系統(tǒng)的應(yīng)用。
針對(duì)上述問題雖然可以增加投影儀或相機(jī)覆蓋被遮擋的區(qū)域,構(gòu)成投影儀-相機(jī)-投影儀系統(tǒng)、相機(jī)-投影儀-相機(jī)測量系統(tǒng)或者多個(gè)相機(jī)投影儀系統(tǒng),增大可視范圍,減小陰影區(qū)域,擴(kuò)大測量區(qū)域,但會(huì)增加成像系統(tǒng)的體積,減少在Eye n-hand系統(tǒng)中應(yīng)用的靈活性。從 Eye-in-Hand系統(tǒng)的角度來看,最佳的方案是開發(fā)一種成本低廉、精度適中、被動(dòng)單目3D成像系統(tǒng)。
編輯:黃飛
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論