 電子發燒友App
電子發燒友App


作者:徐翔斌,馬中強
訂單揀選是將商品從其存儲位置揀出以滿足客戶訂單需求的過程,訂單揀選是典型的勞動密集型作業,占倉庫運作總成本的60% ~ 70%[1]。隨著客戶需求從大批量少批次向小批量個性化轉變,客戶對訂單的配送時限和服務質量要求越來越高,提升訂單揀選效率已成為當今學術界和工業界共同關心的難題。基于移動機器人的揀貨系統(Robotic mobile fulfillment systems,RMFS)的訂單揀選效率是傳統揀貨系統的2 ~ 3倍[2–3],徹底顛覆了傳統倉庫的揀貨作業模式,為倉庫的廣泛應用和研究開辟了新途徑。
RMFS系統2003年由Kiva公司最先開發,2012年亞馬遜收購Kiva后在其北美各大配送中心開始部署[4–5],國內已有菜鳥、京東和快倉等公司成功應用RMFS。RMFS的核心思想是利用移動機器人將存儲商品的移動式貨架搬運到揀貨站臺,揀貨人員揀取商品后再由機器人將貨架送回存儲區存儲。相比傳統揀貨系統,RMFS提高了揀貨效率、準確性以及倉庫空間利用率,縮短了倉庫部署和調試時間,并可根據客戶需求的變化實時、動態調整倉庫布局結構,特別適合需求波動性大、時效性強的電商企業的訂單揀選[2–3,6]。
與傳統揀貨系統類似,RMFS也面臨貨位指派、訂單分批、任務分配以及路徑規劃等方面的問題,但在實際運作過程中,RMFS與傳統揀貨系統相比存在諸多不同,面臨一些新的亟需解決的問題。鑒于此,本文對RMFS訂單揀選過程的幾個關鍵問題進行綜述研究,并給出未來的研究方向,為RMFS的實踐應用及學術研究提供參考。
01? RMFS簡介
RMFS的倉庫布局可分為存儲區、揀選區和運輸區(如圖1(a)所示),訂單揀選作業主要在揀選區進行(如圖1(b)~(d)所示)。 倉庫一般采用柵格化布局,利用條碼、RFID等技術實現信息識別,并利用室內GPS和傳感器技術進行導航、定位和避障[6-8]。 RMFS的貨架為移動式貨架,有運輸貨架和存貨貨架兩種,運輸貨架是存放訂單容器的貨架,存貨貨架又可分為托盤貨架和單品貨架,托盤貨架的作用是存放和揀選整箱商品,單品貨架則存放零揀商品[4,6]。 補貨站臺位于存儲區和揀選區之間,揀選站臺位于揀選區和運輸區之間,揀貨和補貨人員分別位于揀選站臺和補貨站臺,他們只需要站在原地等待移動機器人搬運貨架到來,并根據系統指示進行訂單揀選或倉庫補貨作業。 RMFS的作業流程為:系統先按照一定策略將商品分配到各存儲貨架(貨位指派問題),在收到客戶訂單后,基于特定的訂單分配分批和任務分配策略將訂單分批,再分配給相應的揀選站臺(訂單分批和分配問題),同時向運輸機器人發布運輸任務(多機器人任務分配問題),機器人將目標貨架從其存儲位置搬運到指定的揀選站臺(多機器人路徑規劃問題),揀選人員按照系統指示依次進行揀選、掃描確認、存放等作業,完成商品揀選后,運輸機器人再將貨架送回存儲區存儲(多機器人路徑規劃問題),需要說明的是,貨架返回后的存儲位置不一定是其原來的存儲位置(貨架儲位動態分配問題)[2]。RMFS的整個作業流程如圖2所示,有關圖2的具體說明可參考文獻[2]。
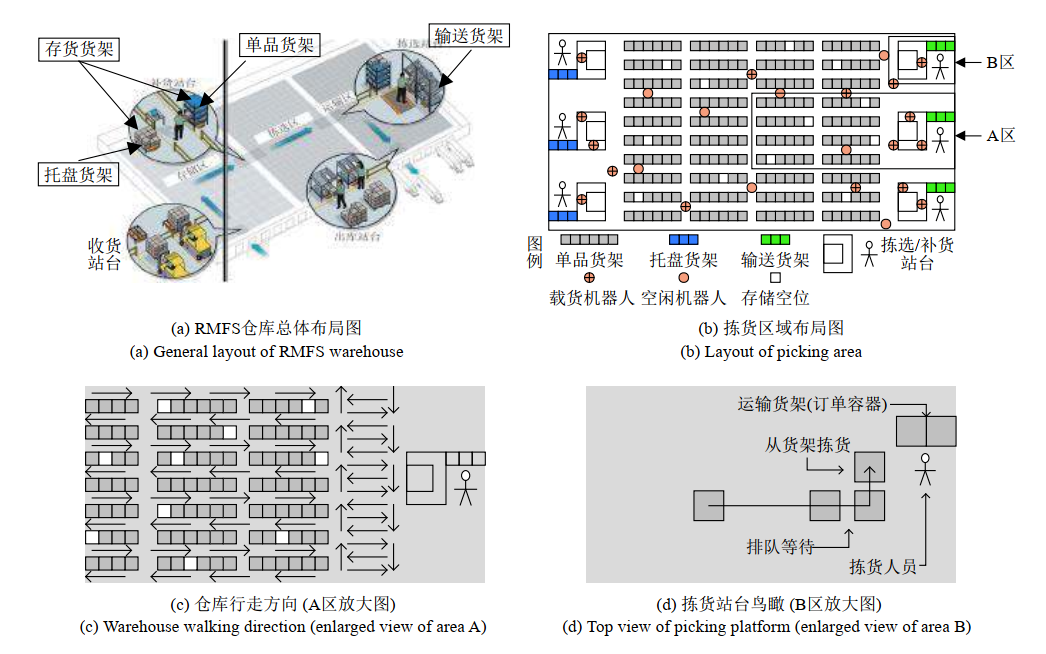
圖1 RMFS揀貨區域布局圖
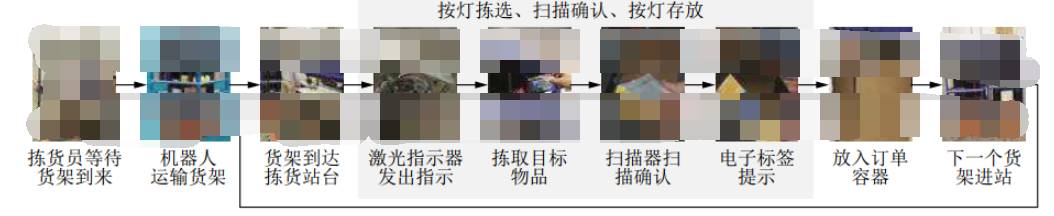
圖2 RMFS訂單揀選作業流程 從圖2的作業流程可以發現RMFS的幾個關鍵的優化和研究方向:首先,RMFS的正常運作依靠自動識別技術、傳感器及通信等技術的支撐,可以對這些使能技術進行研究[9]。其次,與傳統揀貨系統類似,貨位指派[4]、訂單分批[10]、任務分配[11]、路徑規劃[12]等問題的優化研究也是提升RMFS效率的關鍵途徑。再次,RMFS本質上是一個自組織模式運營的分布式多機器人系統,可基于分布式、去中心化的思路進行系統優化,這與傳統揀貨系統有很大的不同[13]。總的來說,RMFS的優化可從使能技術、倉庫布局設計、貨位指派、訂單分批、路徑規劃、分區揀選以及多機器人任務分配及協作等方面開展研究[1,14] (如圖3所示)。RMFS的優化研究可分為系統實現、系統作業以及研究方法三個層面,其優化理論框架如圖4所示。
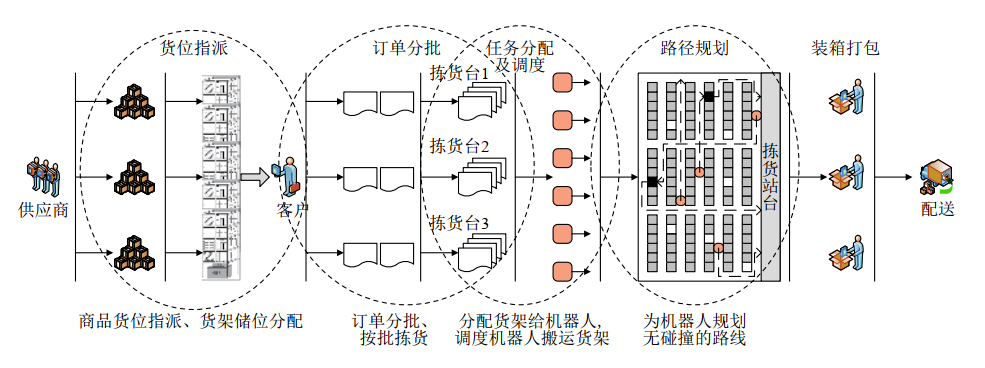
圖3?RMFS揀貨優化流程
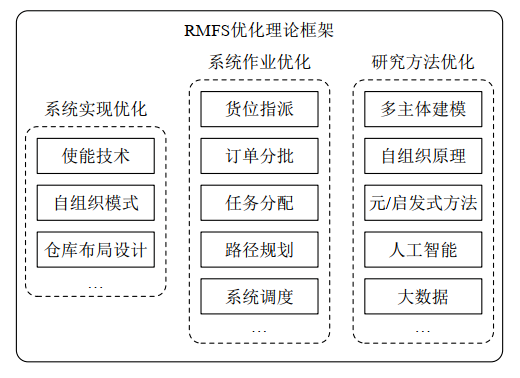
圖4 RMFS優化理論框架 02? RMFS研究現狀
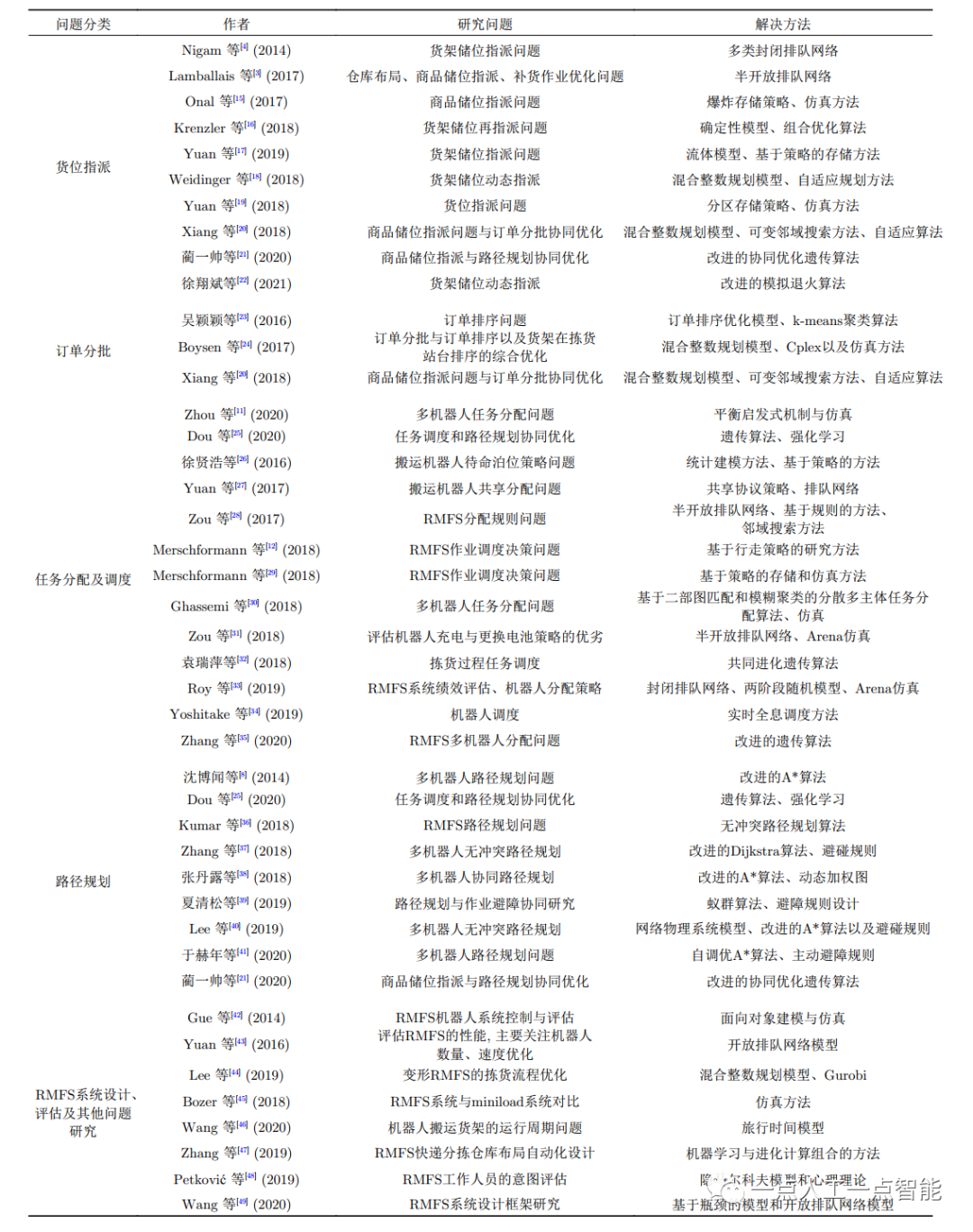
RMFS的相關研究主要涉及貨位指派、訂單分批、任務分配與調度、路徑規劃以及系統設計與評估等問題,相關問題的研究文獻總結如表1所示。
表1?RMFS研究文獻匯總
2.1 貨位指派
傳統意義上的貨位指派是指將商品分配到倉庫中的合適儲位,使訂單分揀過程行走的距離最短[1]。 RMFS的貨位指派可分為商品儲位指派和貨架儲位動態指派,商品儲位指派是指在考慮商品銷售關聯性的情況下,將關聯商品指派到同一貨架存儲,最終實現貨架存儲商品的關聯度最大,降低訂單揀選搬運的貨架總次數,圖5(a)為商品儲位指派的示意圖;在構建商品儲位指派數學模型時,需考慮所有商品必須被指派到貨架存儲、同一類商品可以存儲于多個貨架以及貨架的存儲容量等約束條件。貨架儲位動態指派是在訂單揀選的過程中,為搬運貨架重新分配儲位,例如將存儲暢銷商品的貨架指派到靠近揀貨站臺的儲位,同時將存儲滯銷商品的貨架指派到遠離揀貨站臺的儲位,實現訂單揀選過程的機器人行走距離最短,圖5(b)為貨架儲位動態指派的示意圖;在構建貨架儲位動態指派數學模型時,需考慮所有貨架必須被指派到儲位,儲位的狀態(占用儲位或開放儲位)以及倉庫布局的連續動態變化關系等約束條件。
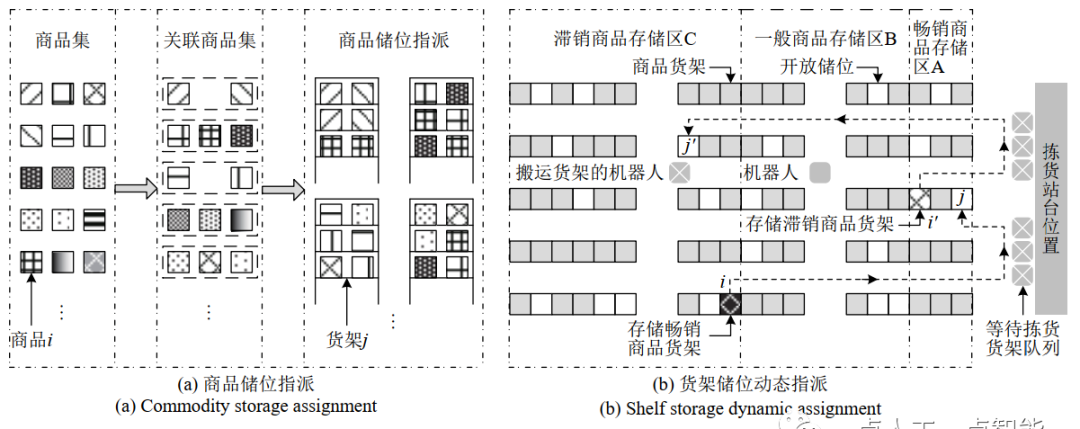
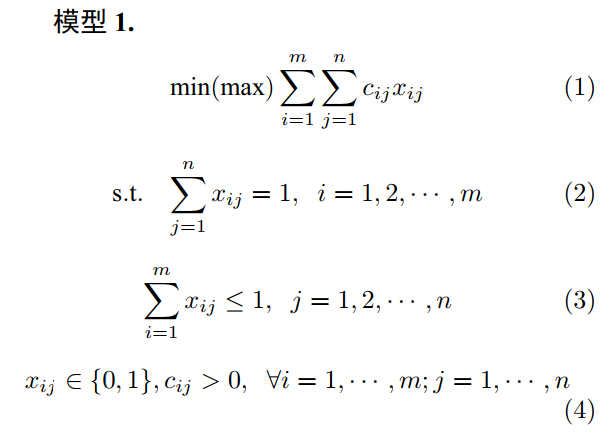
圖5 RMFS貨位指派示意圖 貨位指派是典型廣義指派問題(Generalized assignment problem,GAP)[50],最基本的貨位指派的數學模型為:
在模型1中, 表示將商品(或貨架)
表示將商品(或貨架) 存儲在位置
存儲在位置 ,否則
,否則 ;
; 表示將商品(或貨架)存儲在貨架或位置的揀貨代價(或收益);式(1)為目標函數,根據選取的不同,可分為求最小值或最大值(例如揀貨時間或距離最小、揀貨效率最大等);式(2)和(3)為約束條件,表示商品(或貨架)與儲位之間的存儲關系;式(4)為變量及取值范圍。 科學的貨位指派方法可以縮短行走距離、降低搜尋時間、減少工作量以及提高倉庫揀貨效率[51–52]。Hausman等[53]最早提出定位存儲、隨機存儲和分類存儲三種基本的貨位指派策略,隨后的文獻分別從需求相關性[54–55]、出貨量[56]、COI[57]、周轉率[58]以及需求和結構相關性[59–60]等方面對貨位指派問題進行了研究,根據問題類型、指派策略以及優化目標的不同,大量文獻基于模型1進行了深入廣泛的研究。
表示將商品(或貨架)存儲在貨架或位置的揀貨代價(或收益);式(1)為目標函數,根據選取的不同,可分為求最小值或最大值(例如揀貨時間或距離最小、揀貨效率最大等);式(2)和(3)為約束條件,表示商品(或貨架)與儲位之間的存儲關系;式(4)為變量及取值范圍。 科學的貨位指派方法可以縮短行走距離、降低搜尋時間、減少工作量以及提高倉庫揀貨效率[51–52]。Hausman等[53]最早提出定位存儲、隨機存儲和分類存儲三種基本的貨位指派策略,隨后的文獻分別從需求相關性[54–55]、出貨量[56]、COI[57]、周轉率[58]以及需求和結構相關性[59–60]等方面對貨位指派問題進行了研究,根據問題類型、指派策略以及優化目標的不同,大量文獻基于模型1進行了深入廣泛的研究。
RMFS與傳統揀貨系統的貨位指派問題不同在于: 1)傳統揀貨系統的貨位指派與路徑策略密切相關[61],RMFS的貨位指派則與路徑策略沒有必然聯系。 2)指派目的地不同:傳統貨位指派只需將商品指派到某一分區或巷道,RMFS既要將商品指派到具體的貨架,還需考慮將關聯商品指派到同一貨架來降低揀貨成本。 3)優化目標不同:傳統揀貨系統將揀貨行走的時間或距離作為貨位指派問題的優化目標,RMFS則可將貨架搬運次數、機器人利用率等作為優化目標[23]。 4)指派復雜度不同:傳統揀貨系統的貨位指派只需對商品進行儲位指派,RMFS則還需考慮貨架的儲位指派(即貨架在倉庫中的位置),這是一個更加復雜的動態指派問題。 5)靜態與動態指派的不同:傳統貨位指派基于“一次指派、分批出庫”的思路,RMFS的貨位指派過程是一種“動態優化、逐步求精”的過程。
RMFS的貨位指派可從以下幾個方面借鑒傳統貨位指派問題的研究理論和方法: 1)考慮商品需求關聯性和頻率:傳統揀貨系統考慮商品需求關聯性、頻率等因素進行貨位指派研究[54–55],RMFS也需考慮此類因素對商品和貨架儲位指派優化的影響。 2)考慮逐步求精的動態貨位調整:動態貨位調整比一次性長遠規劃的貨位指派更為簡單有效[62],可基于逐步求精、漸進式優化的思路研究RMFS的商品和貨架的動態調整問題。 3)考慮人因及設備等因素:傳統揀貨系統中人的因素對訂單揀選效率影響巨大[63],貨位指派需考慮人員的工作負荷[64]、技能[65]以及擁堵[66]等因素,RMFS貨位指派優化過程中也應考慮機器人擁堵、空閑率、電量以及作業人員技能、效率等因素。 4)借鑒已有研究方法:譬如可用動態規劃[67]、啟發式[68]、數據挖掘[69]和聚類分析[70]等方法來研究RMFS貨位指派問題。
RMFS的貨位指派研究可分為商品儲位指派研究和貨架儲位指派研究,現有文獻主要利用排隊論、整數規劃、仿真、啟發式規則以及智能優化等方法進行建模和求解。研究文獻根據問題和方法分類綜述如下:
1)商品儲位指派研究
a)利用排隊論方法
Lamballais等[3]構建了RMFS系統效能評估的排隊網絡模型,分別以最大訂單吞吐量、平均訂單揀選周期以及機器人利用率等指標評價了不同存儲策略的系統績效,結果表明采用基于貨架周轉率的商品分區存儲策略可使系統的最大吞吐量提高50%左右,不足之處是文中假設每個貨架只存儲一種商品。在此基礎上,Onal等[15]提出了一種爆炸存儲的商品儲位指派策略,構建了商品儲位指派的排隊論模型,結果表明隨著爆炸水平的提高,訂單揀選時間最多可降低16%。
b)利用混合整數規劃方法
Xiang等[20]在考慮爆炸存儲策略和商品關聯性的情況下,構建了RMFS商品儲位指派與路徑規劃協同優化的混合整數規劃模型,設計的變鄰域搜索算法在解的質量和求解時間方面比遺傳算法分別好6.0%和3.3%,但未考慮缺貨和補貨的情況。藺一帥等[21]也利用改進的協同優化遺傳算法對RMFS的商品儲位指派和路徑規劃問題進行了協同優化,構建了商品儲位指派與路徑規劃協同優化的混合整數規劃模型。
2)貨架儲位指派研究
a)利用排隊論方法
Nigam等[4]利用排隊論模型研究了RMFS隨機空位存儲與最近空位存儲策略的效率問題,結果表明隨機空位存儲的RMFS系統空間利用率較高,而最近空位存儲的RMFS系統吞吐量較高。Yuan等[17]進一步研究了隨機存儲、基于速度和基于類的貨架儲位指派策略,構建了不同存儲策略績效評估的排隊模型,結果發現基于類的策略魯棒性較強,可以適應不同倉庫配置、布局的RMFS。
b)利用(混合)整數規劃方法
在基于策略的貨位指派研究中,文獻[24,71]提出一種可顯著提高RMFS揀貨效率的共享存儲策略,文獻[19]發現分區存儲策略也能顯著的提高RMFS的揀貨效率,在此基礎上,Weidinger等[18]對RMFS的貨架儲位動態指派問題進行了研究,構建了混合整數規劃模型,并利用自適應規劃方法求解模型,將機器人的揀貨總行程和編隊數量分別降低了3.49%和2.17%,提高了RMFS的揀貨效率,但未構建反映貨架儲位動態變化關系的理論模型,文獻[22]進一步構建了反映貨架儲位動態變化關系的混合整數規劃模型,該動態優化模型可縮短30%左右的揀貨距離。
此外也有文獻利用仿真來研究RMFS問題,仿真技術具有可視化效果好、人機交互靈活等優點,特別適合用于模型和優化效果的驗證,例如Zou等[28]利用仿真方法驗證了半開放排隊網絡模型的正確性,Merschformann等[29]則在規劃模型基礎上,利用仿真平臺RAWSim-O對RMFS的隨機、固定、最近空位以及基于類這幾種典型的貨架儲位指派策略進行了對比研究,結果表明基于類的指派策略的效果更加顯著。
綜上所述,有關RMFS貨位指派的研究成果顯著,但主要集中在對商品和貨架儲位指派的系統績效評估方面,較少涉及商品儲位指派和貨架儲位指派的協同優化,并且一般采用仿真驗證指派策略的有效性。由于RMFS與傳統揀貨系統在貨位指派方面存在諸多不同,建議重點關注: 1)考慮集成多種指派策略、并尋找最優策略的貨位指派方法。 2)由于RMFS需要分別對商品和貨架存儲進行雙重指派,應重點關注商品關聯性對商品、貨架儲位指派的影響,重點研究商品和貨架儲位的雙重指派這二者之間的內在聯系和相關影響。 3)特別關注動態貨位指派問題,可基于逐步求精、漸進式優化的思想研究RMFS的商品與貨架的動態儲位指派問題。 4)在模型1的基礎上,根據RMFS貨位指派問題的特性,分別對商品和貨架的(動態)貨位指派模型進行研究,構建RMFS貨位指派問題的理論模型。
2.2 訂單分批
訂單分批是指為了提高訂單揀選效率而把多個訂單合并揀選的過程,其目的是為了降低訂單揀選時貨架的搬運次數、機器人的行走距離或時間[1]。RMFS的訂單分批示意圖如圖6所示,在RMFS訂單分批優化過程中,需考慮每個訂單 只能被指派到一個訂單批次
只能被指派到一個訂單批次 、每個批次包含的訂單數不能超過規定的數量
、每個批次包含的訂單數不能超過規定的數量 以及該批次所有商品必須都被揀選等約束條件,一般將貨架搬運次數、機器人行走距離以及同批次內訂單關聯度等指標作為優化目標。
以及該批次所有商品必須都被揀選等約束條件,一般將貨架搬運次數、機器人行走距離以及同批次內訂單關聯度等指標作為優化目標。
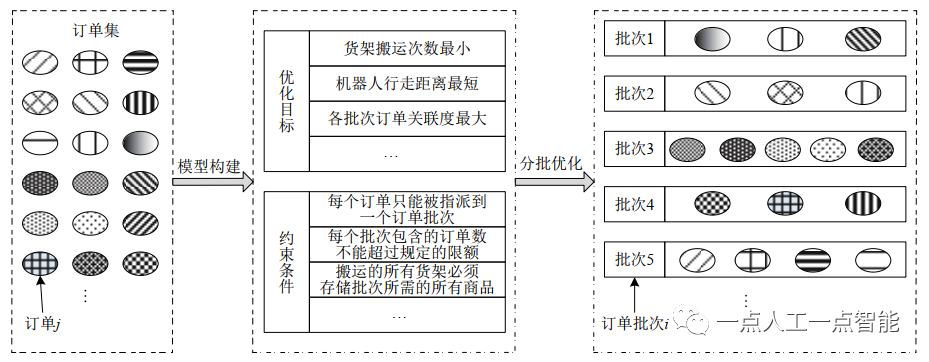
圖6 RMFS訂單分批示意圖 最基本的訂單分批問題的數學模型為[72]:

在模型2中, 表示客戶訂單,
表示客戶訂單, ;
; 為訂單集合,
為訂單集合, ;
; 為每批次訂單最大容量;
為每批次訂單最大容量; 表示揀取批次
表示揀取批次 所有商品的代價(例如時間、距離);
所有商品的代價(例如時間、距離); 表示訂單
表示訂單 被分配到批次
被分配到批次 ,否則,
,否則, ;式(5)為目標函數,根據
;式(5)為目標函數,根據 的不同可取最大值或最小值(例如貨架搬運次數最小、系統吞吐量最大等);式(6)為訂單批次合理性約束;式(7)表示每個訂單都必須被指派到一個批次;式(8)為變量和參數取值。 訂單分批問題最早由Ackerman[73]提出,相比貨位指派,訂單分批優化對揀貨效率的提升更加明顯[74]。根據訂單信息是否已知,訂單分批可分為在線訂單分批和離線訂單分批,其中在線訂單分批更加符合實際情況。訂單分批問題為NP難題[75],一般利用(元)啟發式算法[76–77]、數據挖掘[78]以及聚類和仿真[79]等方法研究離線訂單分批問題,而在線訂單分批問題則利用時間窗、啟發式等方法研究[10],對離線訂單分批問題的研究方法進行改進也可用于在線訂單分批問題的研究[80],國內的馬士華等[81]、李詩珍等[79]也對這方面的問題進行了深入研究。 RMFS訂單分批的目的是使貨架搬運次數、訂單揀選時間或延遲率等指標最小,該問題可分為兩種情況:一是先對訂單分批處理,然后將訂單批次分配至揀貨站臺;二是先將訂單分配至揀貨站臺,再進行訂單分批處理。RMFS與傳統揀貨系統的訂單分批問題的不同表現在: 1)分批對象不同:RMFS既可直接對訂單分批,還可根據待揀商品的存儲位置對機器人進行分批。 2)考慮因素不同:傳統揀貨系統的訂單分批問題一般只考慮揀貨車容量、揀貨員的工作負荷、擁堵以及路徑策略等因素[77,82-83],RMFS則還需要考慮機器人死鎖、電量、故障以及利用率等問題。 3)優化目標不同:RMFS一般將商品貨架搬運次數、機器人利用率等指標作為優化目標[23]。 4)復雜度不同:RMFS的訂單分批需要考慮兩種不同的訂單分批情況,問題的復雜度更高。
的不同可取最大值或最小值(例如貨架搬運次數最小、系統吞吐量最大等);式(6)為訂單批次合理性約束;式(7)表示每個訂單都必須被指派到一個批次;式(8)為變量和參數取值。 訂單分批問題最早由Ackerman[73]提出,相比貨位指派,訂單分批優化對揀貨效率的提升更加明顯[74]。根據訂單信息是否已知,訂單分批可分為在線訂單分批和離線訂單分批,其中在線訂單分批更加符合實際情況。訂單分批問題為NP難題[75],一般利用(元)啟發式算法[76–77]、數據挖掘[78]以及聚類和仿真[79]等方法研究離線訂單分批問題,而在線訂單分批問題則利用時間窗、啟發式等方法研究[10],對離線訂單分批問題的研究方法進行改進也可用于在線訂單分批問題的研究[80],國內的馬士華等[81]、李詩珍等[79]也對這方面的問題進行了深入研究。 RMFS訂單分批的目的是使貨架搬運次數、訂單揀選時間或延遲率等指標最小,該問題可分為兩種情況:一是先對訂單分批處理,然后將訂單批次分配至揀貨站臺;二是先將訂單分配至揀貨站臺,再進行訂單分批處理。RMFS與傳統揀貨系統的訂單分批問題的不同表現在: 1)分批對象不同:RMFS既可直接對訂單分批,還可根據待揀商品的存儲位置對機器人進行分批。 2)考慮因素不同:傳統揀貨系統的訂單分批問題一般只考慮揀貨車容量、揀貨員的工作負荷、擁堵以及路徑策略等因素[77,82-83],RMFS則還需要考慮機器人死鎖、電量、故障以及利用率等問題。 3)優化目標不同:RMFS一般將商品貨架搬運次數、機器人利用率等指標作為優化目標[23]。 4)復雜度不同:RMFS的訂單分批需要考慮兩種不同的訂單分批情況,問題的復雜度更高。
RMFS的訂單分批可從以下幾個方面借鑒傳統訂單分批問題的研究成果: 1) RMFS訂單分批問題為NP難題,可利用(元)啟發式、數據挖掘、聚類等方法對RMFS的訂單分批進行研究。 2)考慮揀貨人員的影響:傳統揀貨系統認為揀貨員的技能可提高批次揀貨的效率[65],RMFS的訂單分批問題研究也需要考慮揀貨員的技能、效率以及工作負荷等因素的影響。 3)考慮訂單交貨期限:訂單交期對訂單揀選至關重要,與傳統揀貨系統類似[84],研究RMFS的訂單分批問題也應考慮訂單交期問題。 4)考慮系統綜合優化:為得到全局最優的訂單分批方案,傳統揀貨系統將訂單分批與路徑規劃、任務分配等問題進行協同優化研究[85],綜合考慮RMFS多個子問題的協同優化研究將是必然趨勢。 5)繼續釋放約束條件:與傳統揀貨系統類似,考慮揀貨過程中出現的突發情況和隨機因素(如插單、取消訂單等)對RMFS訂單分批問題的影響,使RMFS訂單分批的研究更加貼合實際情況。
現有文獻以批次訂單關聯性最大、貨架搬運次數最小等指標為優化目標,主要利用排隊論、(混合)整數規劃、聚類等方法研究RMFS訂單分批問題,對RMFS訂單分批的文獻按照研究方法綜述如下:
1)利用排隊論方法
Yu等[86]在人工揀貨作業背景下,構建了訂單分批與揀貨分區協同優化的近似排隊網絡模型,該近似排隊網絡模型與仿真結果相比相對誤差小于10%。考慮到訂單分批策略對RMFS效率的影響與AS/RS類似,Hur等[87]設計了評估AS/RS系統績效的排隊網絡模型,仿真結果表明其設計的模型的誤差在0.1%到8.6%之間,這些研究為基于排隊論方法研究RMFS的訂單分批問題提供了理論基礎。
2)利用(混合)整數規劃方法
Xiang等[20]最先研究了RMFS的訂單分批問題,在模型2的基礎上構建了RMFS訂單分批問題的混合整數規劃模型。
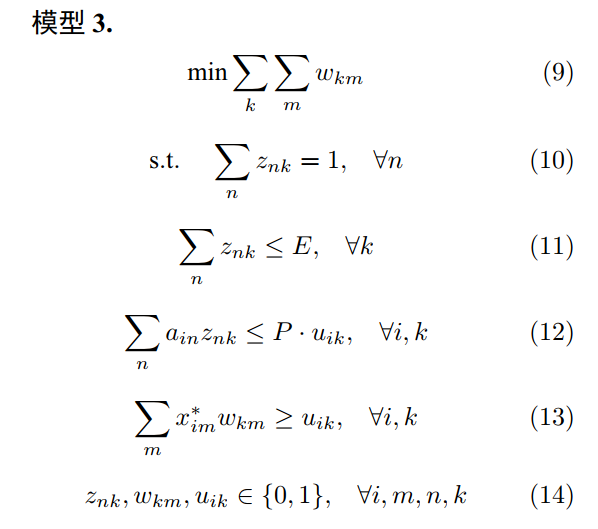
在模型3中, 為訂單總數;
為訂單總數; 為貨架總數;
為貨架總數; 為商品種類總數;
為商品種類總數; 為訂單批次總數;
為訂單批次總數; 為每批次包含的最大訂單數;
為每批次包含的最大訂單數; 表示訂單編號,
表示訂單編號, ;
; 表示貨架編號,
表示貨架編號, ;
; 表示商品種類,
表示商品種類, ;
; 為訂單批次編號,
為訂單批次編號, ;
; 表示訂單
表示訂單 包括商品
包括商品 ,否則,
,否則, ;
; 表示商品
表示商品 存儲在貨架
存儲在貨架 ,否則
,否則 ;
; 表示訂單被分配給批次
表示訂單被分配給批次 ,否則
,否則 ;
; 表示因揀選批次而搬運貨架,否則,
表示因揀選批次而搬運貨架,否則, ;
; 表示批次包含商品,否則,
表示批次包含商品,否則, ;式(9)為目標函數,表示批次揀貨過程貨架搬運次數最小;式(10)表示每個訂單都必須被指派到一個訂單批次;式(11)表示分配到批次的訂單總數不能超過規定的最大數量;式(12)表示商品的批次歸屬;式(13)表示被搬運的貨架必須存儲該批次所有的商品;式(14)表示變量取值。 此外Xiang等[20]還設計了可變鄰域搜索算法進行求解,結果表明貨位指派與訂單分批的協同優化顯著降低了貨架的搬運次數。Boysen等[24]則將該問題擴展為訂單分批、訂單排序以及貨架在揀貨站臺排序三個子問題,結果表明較優的訂單調度與貨架排序可使機器人運行時間最少可降低21%。AS/RS與RMFS同為“物至人”揀貨系統,在訂單分批方面存在諸多相同之處,王艷艷等[88]對AS/RS和Carousel揀貨系統的訂單分批問題進行研究,吳穎穎等[23]在此基礎上研究了物至人揀貨系統的訂單排序問題,將貨架出入庫頻率作為優化目標,優化后的系統揀貨效率提高了15.9%。為了提高電商倉庫的揀貨效率,王旭坪等[74]和Zhang等[10]在考慮訂單交貨期限的前提下對訂單分批與排序協同優化問題進行了研究,構建了協同優化的整數規劃模型,實現了80.365%的訂單配送率。 3)利用聚類的方法 訂單分批本質上是一個聚類過程,因而聚類策略是訂單分批問題研究的重點,Chen等[78]利用基于關聯規則的聚類方法研究了人工揀貨系統的訂單分批問題,構建了訂單分批的0-1整數規劃模型,利用關聯規則算法進行模型求解,優化效果顯著。與文獻[78]不同,Al-Araidah等[89]則設計了訂單聚類的啟發式規則,最多可減少44%的揀貨時間。這些研究表明利用聚類、關聯規則等數據挖掘方法進行RMFS的訂單分批研究將是一種有效途徑。
;式(9)為目標函數,表示批次揀貨過程貨架搬運次數最小;式(10)表示每個訂單都必須被指派到一個訂單批次;式(11)表示分配到批次的訂單總數不能超過規定的最大數量;式(12)表示商品的批次歸屬;式(13)表示被搬運的貨架必須存儲該批次所有的商品;式(14)表示變量取值。 此外Xiang等[20]還設計了可變鄰域搜索算法進行求解,結果表明貨位指派與訂單分批的協同優化顯著降低了貨架的搬運次數。Boysen等[24]則將該問題擴展為訂單分批、訂單排序以及貨架在揀貨站臺排序三個子問題,結果表明較優的訂單調度與貨架排序可使機器人運行時間最少可降低21%。AS/RS與RMFS同為“物至人”揀貨系統,在訂單分批方面存在諸多相同之處,王艷艷等[88]對AS/RS和Carousel揀貨系統的訂單分批問題進行研究,吳穎穎等[23]在此基礎上研究了物至人揀貨系統的訂單排序問題,將貨架出入庫頻率作為優化目標,優化后的系統揀貨效率提高了15.9%。為了提高電商倉庫的揀貨效率,王旭坪等[74]和Zhang等[10]在考慮訂單交貨期限的前提下對訂單分批與排序協同優化問題進行了研究,構建了協同優化的整數規劃模型,實現了80.365%的訂單配送率。 3)利用聚類的方法 訂單分批本質上是一個聚類過程,因而聚類策略是訂單分批問題研究的重點,Chen等[78]利用基于關聯規則的聚類方法研究了人工揀貨系統的訂單分批問題,構建了訂單分批的0-1整數規劃模型,利用關聯規則算法進行模型求解,優化效果顯著。與文獻[78]不同,Al-Araidah等[89]則設計了訂單聚類的啟發式規則,最多可減少44%的揀貨時間。這些研究表明利用聚類、關聯規則等數據挖掘方法進行RMFS的訂單分批研究將是一種有效途徑。
綜上,上述文獻對RMFS的訂單分批問題做了初步研究,并取得了一定的優化效果,特別是AS/RS的訂單分批研究對RMFS具有重要的借鑒意義。但RMFS與傳統揀貨系統的訂單分批問題存在諸多不同,應重點關注: 1)研究不同分批策略對RMFS訂單分批效果的影響,并比較各分批策略的優劣。 2)RMFS的訂單分批應將商品關聯性、需求頻率以及貨架搬運次數作為重要優化指標,并考慮機器人特性、狀態(如電量、路徑等)等因素對訂單分批的影響。 3)考慮訂單取消以及插單等突發情況下的RMFS訂單分批問題。
2.3 任務分配及調度
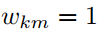
傳統揀貨系統的任務分配是將揀貨任務按一定方式分配給揀貨員或堆垛機,讓揀貨員或堆垛機將待揀商品從存儲位置揀出,目的是使揀貨的總代價最小[1]。與傳統揀貨系統不同,RMFS是一個多機器人系統(MRS),其任務分配是一個典型的多機器人任務分配(MRTA)問題,具體包括兩個方面,首先是將任務集分配給機器人群體,其次是協調機器人群體的行為,使其高效、可靠地完成任務[90]。 貨架與機器人的任務分配示意圖如圖7所示,在構建貨架與機器人之間的分配模型時,可將機器人的行走距離、訂單揀選效率以及機器人電量消耗等指標作為優化目標,并將機器人的電量限制、同一時刻貨架只能被一個機器人搬運(反之亦然)等作為約束條件。 MRTA問題可建模為最優分配、整數規劃、調度、網絡流等模型[91],也可將其視為多旅行商問題(Multiple traveling salesmen problem,MTSP)。MRTA問題本質上也是一種廣義指派問題,其數學模型為[92]:
圖 7? RMFS的貨架與機器人分配示意圖
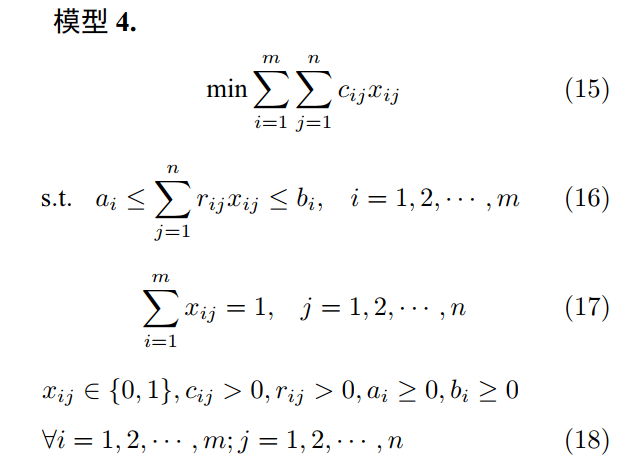
在模型4中, 表示將任務
表示將任務 分配給
分配給 (Agent可為機器人或揀貨/補貨站臺),否則
(Agent可為機器人或揀貨/補貨站臺),否則 ;
; 表示將任務分配給的工作代價或收益;
表示將任務分配給的工作代價或收益; 表示完成任務所需要的資源數量;
表示完成任務所需要的資源數量; 和
和 分別表示完成任務花費的最小和最大資源;式(15)為目標函數,根據選取的不同,可以取最小值或最大值;式(16) ~ (17)為約束條件,表示任務與之間的分配關系;式(18)為變量和參數取值。 多數文獻將機器人完成任務的代價最小、利用率或產出率最大等作為優化目標,并利用基于行為[93]、情感[94–95]、市場[96–97]和最優化[11,98]等方法求解MRTA問題。其中基于市場和最優化的方法應用最為廣泛,基于市場的方法是利用拍賣的思想進行任務分配,又可分為單物品拍賣和組合拍賣[90]兩種,相比其他拍賣形式,組合拍賣能夠提高拍賣效率,降低競標人風險。由于組合拍賣的勝者決定問題已被證明是NP難題,大多文獻都利用啟發式或元啟發式算法[11,99]求解MRTA問題,也有文獻利用聚類[100]和仿真[101]的方法,值得一提的是陳培友等[102]將混沌理論引入了組合拍賣的任務分配過程。 RMFS的任務分配問題與傳統MRTA問題存在諸多不同,主要有: 1)任務分配復雜度不同:相比傳統MRTA問題,RMFS是多任務多目標的任務分配,涉及訂單與揀貨站臺、貨架與機器人以及揀貨(補貨)站臺與機器人三個方面[28–29],任務分配的復雜度更高。 2)決策方式不同:RMFS的任務分配采用去中心化的分布式智能體決策方式,相比傳統MRTA的集中決策控制系統魯棒性更強、效果更好[9,42]。 3)約束條件不同:RMFS的任務分配需要考慮訂單交貨時間、服務水平等特殊條件約束。 4)任務分配環境不同:RMFS的任務分配是在動態環境中進行,比靜態環境中的MRTA問題更加復雜。
分別表示完成任務花費的最小和最大資源;式(15)為目標函數,根據選取的不同,可以取最小值或最大值;式(16) ~ (17)為約束條件,表示任務與之間的分配關系;式(18)為變量和參數取值。 多數文獻將機器人完成任務的代價最小、利用率或產出率最大等作為優化目標,并利用基于行為[93]、情感[94–95]、市場[96–97]和最優化[11,98]等方法求解MRTA問題。其中基于市場和最優化的方法應用最為廣泛,基于市場的方法是利用拍賣的思想進行任務分配,又可分為單物品拍賣和組合拍賣[90]兩種,相比其他拍賣形式,組合拍賣能夠提高拍賣效率,降低競標人風險。由于組合拍賣的勝者決定問題已被證明是NP難題,大多文獻都利用啟發式或元啟發式算法[11,99]求解MRTA問題,也有文獻利用聚類[100]和仿真[101]的方法,值得一提的是陳培友等[102]將混沌理論引入了組合拍賣的任務分配過程。 RMFS的任務分配問題與傳統MRTA問題存在諸多不同,主要有: 1)任務分配復雜度不同:相比傳統MRTA問題,RMFS是多任務多目標的任務分配,涉及訂單與揀貨站臺、貨架與機器人以及揀貨(補貨)站臺與機器人三個方面[28–29],任務分配的復雜度更高。 2)決策方式不同:RMFS的任務分配采用去中心化的分布式智能體決策方式,相比傳統MRTA的集中決策控制系統魯棒性更強、效果更好[9,42]。 3)約束條件不同:RMFS的任務分配需要考慮訂單交貨時間、服務水平等特殊條件約束。 4)任務分配環境不同:RMFS的任務分配是在動態環境中進行,比靜態環境中的MRTA問題更加復雜。
RMFS的任務分配問題可以按照廣義指派問題進行模型構建,現有文獻主要利用排隊論、啟發式規則、智能優化算法以及仿真等方法研究MRTA問題,相關研究文獻按照研究方法分類綜述如下:
1)利用排隊論方法
Zou等[28]以在線零售為背景,構建了排隊網絡模型來研究RMFS的任務分配規則問題,并設計鄰域搜索方法尋找最優分配規則,結果表明基于訂單處理速度的分配規則要比隨機分配規則更優,并且鄰域搜索方法可以找到接近最優的分配規則,但文中未對機器人的分配規則進行研究。 在此基礎上,Roy等[33]研究了多分區存儲模式的RMFS的機器人分配策略,構建了兩階段排隊網絡隨機模型,結果表明,單個存儲區應采用按批次分配機器人的方式,最短隊列的分配方式則在多分區存儲中系統吞吐量更大,最多可降低60%的訂單揀選時間,但缺乏對隨機模型參數更加廣泛的評估研究。Yuan等[27]則利用排隊網絡和共享協議研究了RMFS搬運機器人的任務共享與分配問題。
2)利用啟發式規則與仿真方法
Zhou等[11]對RMFS中的MRTA問題進行研究,提出了同時考慮基于拍賣和聚類策略的平衡啟發式機制,以機器人行走距離最小為目標,仿真發現平衡啟發式機制能縮短機器人行走距離,提高了機器人利用率,并且在解的質量相近的情況下,平衡啟發式機制的求解時間降低了5% ~ 15%。 但文獻[11]在機器人完全自利、環境已知等條件假設的前提下研究了RMFS的MRTA問題,與實際RMFS的MRTA問題有一定的差距。Merschformann等[29]則從揀貨和補貨兩方面利用RAWSim-O仿真平臺研究了RMFS任務分配,指出工程人員應該更加注重待揀訂單的分配決策問題。Ghassemi等[30]則進一步利用仿真的方法對RMFS的任務分配問題進行研究,比較了分散和集中分配兩種任務分配模式,結果表明,分散分配在保證解的質量的情況下,求解速度比集中算法快1 ~ 3個數量級。RMFS揀貨過程的微觀問題同樣對揀貨效率具有重要影響,Gue等[42]利用仿真的方法研究了機器人系統的控制方法,設計了多機器人分散控制算法,結果表明分散控制相比集中控制方法更能避免機器人死鎖的發生。值得一提的是,Yoshitake等[34]利用實時全息調度方法研究了RMFS的機器人實時調度問題,將RMFS的生產率平均分別提高了6.7% (標準倉庫)和12.5% (大規模倉庫)。
3)利用智能優化算法
文獻[25]在文獻[11]的基礎上研究了RMFS的任務調度問題,分別利用強化學習和遺傳算法進行問題求解。沈博聞等[8]則利用智能調度算法研究了RMFS的任務分配調度問題,但對訂單的分配處理過于理想化。袁瑞萍等[32]進一步研究了RMFS的任務調度問題,設計了改進的共同進化遺傳算法進行問題求解,結果表明改進的算法縮短了求解時間(同步揀選模式下算法的求解時間是異步模式下求解時間的50%)。隨后的Zhang等[35]也利用改進的遺傳算法研究了RMFS的機器人分配問題,與傳統的基于規則的調度方法相比,改進的遺傳算法更加有效。
綜上,RMFS的任務分配及調度研究成果豐碩,主要針對RMFS的MRTA問題的績效指標評價、策略比較、揀貨調度以及任務分配問題進行研究,但對MRTA與RMFS系統其他問題的協同優化研究不多。RMFS任務分配及調度研究可借鑒傳統MRTA問題的研究理論和方法: 1)利用組合拍賣的方法:RMFS中訂單、揀選站臺、機器人以及貨架之間存在復雜的交互關系,組合拍賣的方法更適合RMFS的任務分配問題[103]。 2)考慮機器人能力:機器人數量、電量、速度以及停泊點等會影響RMFS的作業效率,在任務分配及調度研究過程中應予以重點關注,尤其應考慮機器人電量的影響[26–27,31,43]。 3)基于機器學習的方法:強化學習、深度學習等機器學習方法被廣泛的用于解決MRTA問題[104],可將其用于求解RMFS的任務分配及調度問題。
RMFS的任務分配及調度研究應重點關注以下幾個方面的問題: 1)綜合研究訂單與揀貨站臺、貨架與機器人以及機器人與揀貨站臺之間的分配,作為多個雙向組合拍賣,相比傳統的拍賣方法更加復雜。 2)考慮訂單緊急程度及交貨期限,確定合理的RMFS訂單分配及調度規則。 3)考慮特殊情況下RMFS任務分配問題,如出現訂單取消、插單以及緊急訂單時的任務動態分配及調度研究,還應考慮機器人的電量、擁堵等對任務分配及調度的影響。 4)在模型4的基礎上構建RMFS任務分配及調度的數學模型,為RMFS多機器人任務分配及調度研究提供理論基礎。
2.4 路徑規劃
路徑規劃是為揀貨人員規劃揀貨時的行走路徑,使最終的揀貨距離最短。揀貨員的路徑規劃問題一般視為旅行商問題(TSP),人工揀貨系統常用穿越、回轉、中點、最大間隙等策略規劃揀貨員的行走路徑[1]。 與傳統揀貨系統不同,RMFS的路徑規劃是一個多機器人路徑規劃(MRPP)問題,其目的是確保機器人在不發生碰撞、擁堵、死鎖以及滿足時間約束要求的前提下,同時對多個機器人進行路徑規劃,最終使機器人揀貨行走的總距離最短,從而提高訂單揀選的效率[12]。 如圖8所示為RMFS的路徑規劃示意圖,圖中以揀貨過程(補貨過程路徑規劃類似)為例給出了一條機器人的行走路徑,機器人需要將 位置的貨架搬運到揀貨站臺,然后再將貨架送到存儲區的
位置的貨架搬運到揀貨站臺,然后再將貨架送到存儲區的 位置存儲,再將
位置存儲,再將 位置的貨架搬運至揀貨站臺揀貨,隨后再送至
位置的貨架搬運至揀貨站臺揀貨,隨后再送至 位置存儲,最終回到停泊區等待;RMFS的MRPP問題類似于TSP問題,需要機器人遍歷系統預先分配好的各個位置,使得機器人行走的路徑最短,此外RMFS的MRPP問題還應考慮機器人避障、電量限制等約束條件。
位置存儲,最終回到停泊區等待;RMFS的MRPP問題類似于TSP問題,需要機器人遍歷系統預先分配好的各個位置,使得機器人行走的路徑最短,此外RMFS的MRPP問題還應考慮機器人避障、電量限制等約束條件。
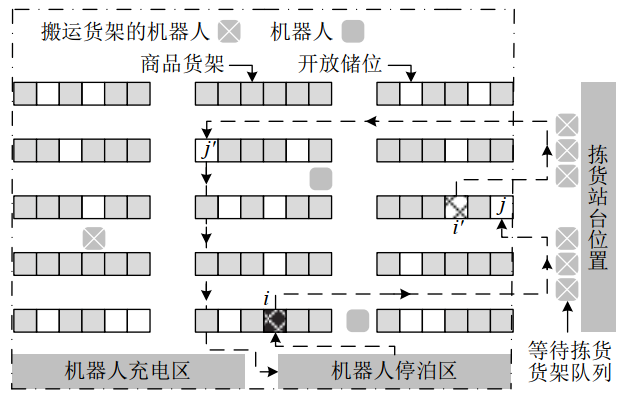
圖 8? RMFS的路徑規劃示意圖 傳統的MRPP是一種多旅行商問題(Multi-Travelling salesman problem,MTSP)[105],其數學模型為:
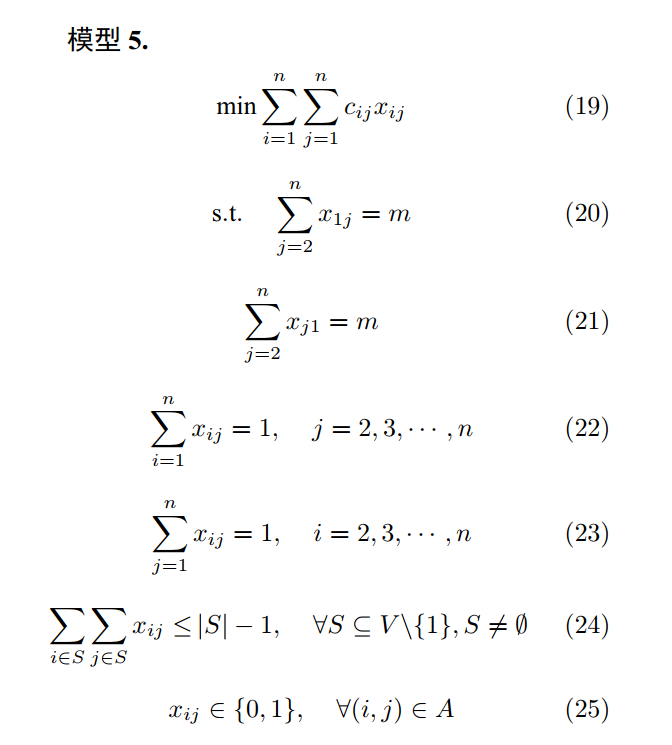
MTSP一般被定義為圖 ,
, 表示節點集合;
表示節點集合; 表示邊的集合。在模型5中,
表示邊的集合。在模型5中, 表示旅行所需花費的代價;
表示旅行所需花費的代價; 表示機器人從點
表示機器人從點 到點
到點 ,否則,
,否則, ;式(19)為目標函數,式(20)和(21)表示這
;式(19)為目標函數,式(20)和(21)表示這 個機器人必須回到同一個起始地點;式(22)、(23)和(25)為分配約束條件;式(24)為消除子回路的約束條件。MTSP及其各類建模方法可具體參考文獻[105]。 MRPP問題的求解方法有精確方法、啟發式以及人工智能等[106],靜態路徑規劃一般利用可視圖、Voronoi圖、柵格圖、人工勢場等路徑規劃方法,并通過深度優先、廣度優先、Dijkstra以及A*和D*等算法求解[107],動態路徑規劃一般利用啟發式或元啟發式[108]、強化學習[109]等智能優化方法求解,也有學者利用雙層模糊邏輯[110]、仿真技術[111]對多機器人路徑規劃問題進行研究。
個機器人必須回到同一個起始地點;式(22)、(23)和(25)為分配約束條件;式(24)為消除子回路的約束條件。MTSP及其各類建模方法可具體參考文獻[105]。 MRPP問題的求解方法有精確方法、啟發式以及人工智能等[106],靜態路徑規劃一般利用可視圖、Voronoi圖、柵格圖、人工勢場等路徑規劃方法,并通過深度優先、廣度優先、Dijkstra以及A*和D*等算法求解[107],動態路徑規劃一般利用啟發式或元啟發式[108]、強化學習[109]等智能優化方法求解,也有學者利用雙層模糊邏輯[110]、仿真技術[111]對多機器人路徑規劃問題進行研究。
RMFS的路徑規劃與傳統的MRPP問題存在諸多不同,主要有: 1)復雜程度不同:傳統的MRPP是在開放空間內的路徑規劃,較少考慮預設行走路徑,RMFS的路徑規劃分為載貨機器人路徑規劃(在巷道內的路徑規劃)和空載機器人路徑規劃(在無限制情況下進行路徑規劃,因為空載機器人可在巷道和貨架下自由行駛)[3]。 2)約束條件不同:RMFS的路徑規劃需考慮訂單交貨時間或優先級等因素。 3)存在任務切換代價:RMFS的路徑規劃需考慮任務切換的代價,即機器人存儲貨架后再搬運下一貨架所需行走的時間或距離[3]。 4)優化目標不同:相比傳統的MRPP問題,可將訂單延遲率、任務切換代價等作為優化目標。
RMFS的MRPP問題可建模為MTSP問題,已有文獻主要利用圖論、智能優化、強化學習、精確算法以及啟發式方法研究RMFS的路徑規劃問題,涉及RMFS的MRPP問題的文獻按照研究方法分類綜述如下:
1)利用圖論的方法
傳統揀貨系統的路徑規劃問題通常可利用圖論的方法建模[112],一般是先對RMFS揀貨區域進行柵格化的處理,然后將RMFS的MRPP問題視為柵格地圖上的路徑規劃問題,例如張丹露等[38]針對RMFS的MRPP問題提出了一種基于動態加權地圖的方法,與預約表下改進的A*算法相比,該方法能夠將機器人行走時間降低17.4%。
2)利用智能優化算法和強化學習
由于MRPP問題是NP難題,一般無法求得最優解,更多利用智能優化算法求解,夏清松等[39]利用蟻群算法研究RMFS的路徑規劃與避障的協同優化問題,并設計了MRPP的避障規則,但文中有關機器人轉向次數較少的假設不符合實際情況,且未考慮動態MRPP問題。 Lee等[44]對RMFS系統進行了擴展,用揀取機器人替代揀貨員揀取商品,并將RMFS的揀貨過程看作特殊的車輛路徑問題(Pick,place,and transport vehicle routing problem,PPTVRP)進行了研究,并利用智能優化算法求解。值得關注的是Dou等[25]利用強化學習方法研究了RMFS的MRPP問題,實驗結果顯示其優化效果與遺傳算法相近,但未進行更廣泛的實例測試。
3)利用精確算法和啟發式規則
沈博聞等[8]和Merschformann等[12]利用A*及其改進算法研究了RMFS的MRPP問題,主要關注生成的路徑有無堵塞和死鎖,但未考慮機器人電量對路徑規劃的影響。Kumar等[36]、Zhang等[37]、Lee等[40]以及于赫年等[41]針對無沖突的MRPP問題進行了研究,主要利用Dijkstra、A*、啟發式規則等算法實現了多機器人無沖突的路徑規劃。
綜上,上述文獻對RMFS的MRPP問題進行了初步研究,取得了一定的研究成果,但MRPP與RMFS其他問題的協同優化研究不多,也很少有文獻研究動態情況下RMFS的MRPP問題,并且當前RMFS的MRPP問題研究一般采用仿真的方法,沒有在理論上給出相應的數學模型。
RMFS的路徑規劃研究可借鑒傳統MRPP問題的研究理論和方法: 1)利用機器學習方法:強化學習、神經網絡等機器學習方法可將路徑規劃、避碰、避障、死鎖以及協作等問題統一解決,無須建立路徑規劃的環境模型和地圖[113],相比傳統方法具有更多優勢。 2)釋放約束條件:考慮不確定環境及動態情況下的MRPP問題,即考慮機器人故障、電量、障礙物等因素對MRPP的影響。 3)多類問題協同優化:將MRPP問題與RMFS的訂單分批、任務分配等問題進行協同優化。 4)限定范圍的連續路徑規劃研究:與傳統MRPP問題類似,RMFS的路徑規劃為一定范圍(如圖8所示區域)內的連續路徑規劃問題,例如Zhang等[37]、夏清松等[39]利用柵格圖法研究了RMFS在揀貨區域內的連續路徑規劃。
RMFS路徑規劃問題在借鑒傳統MRPP問題研究的基礎上,應重點關注: 1)設計載貨機器人和空載機器人的不同路徑規劃規則,尤其考慮空載機器人可在貨架下行駛的情況。 2)考慮訂單交期、退單、插單、退貨以及緊急訂單等情況對RMFS的MRPP問題的影響。 3)將強化學習、深度學習等方法用于RMFS的MRPP問題的研究。4)在模型5的基礎上對RMFS的MRPP問題進行研究,提出符合RMFS實際情況的MRPP理論模型。
2.5 研究方法
RMFS系統建模和優化方法主要涉及排隊論、圖論、機器學習、數據挖掘以及Agent建模等方法,本節對這些建模和優化方法進行綜述,為RMFS系統的后續研究指明方向。
1)排隊論方法
排隊論是研究系統隨機聚散現象和隨機服務系統工作過程的數學理論和方法,RMFS的貨位指派、訂單分批、任務分配及調度等問題可利用排隊論進行研究。 例如Lamballais等[3]、Onal等[15]、Nigam等[4]以及Yuan等[17]分別利用排隊論對商品和貨架的儲位指派策略進行了研究;Yu等[86]和Hur等[87]均構建了傳統揀貨系統訂單分批問題的排隊網絡評估模型,為利用排隊論研究RMFS的訂單分批問題提供了參考;Zou等[28]和Roy等[33]也都利用排隊網絡模型研究RMFS的任務分配和機器人分配問題。在利用排隊論方法對RMFS的優化研究中,主要是針對研究的問題特性構建系統績效評估的排隊網絡模型,并通過仿真對優化策略和排隊模型進行有效性驗證,如圖9所示為RMFS系統績效評估的半開放排隊網絡模型。
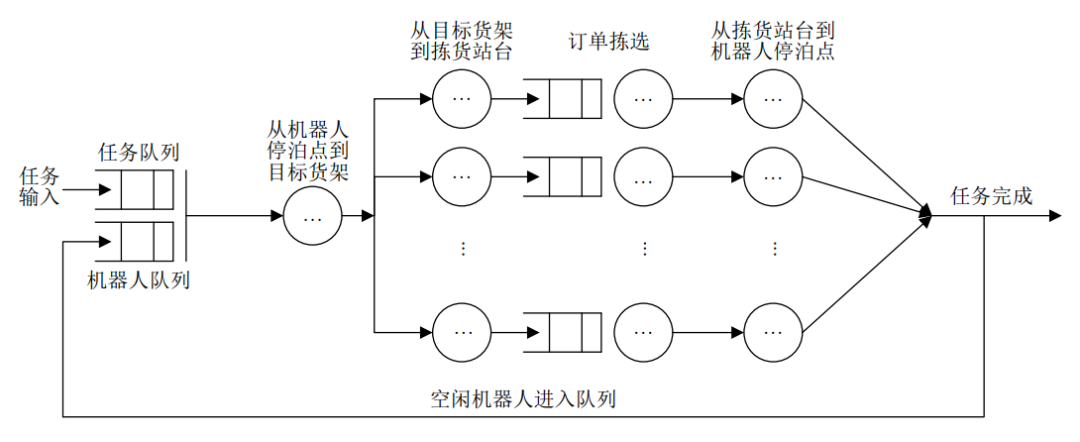
圖9 RMFS績效評估的半開放排隊網絡模型 2)圖論方法
圖可直觀的表示出事物之間的關系,傳統揀貨系統的路徑規劃問題可利用圖論的方式進行表示和研究[1],RMFS的路徑規劃作為一種多機器人的路徑規劃問題,也可利用圖論的方法進行研究。例如張丹露等[38]針對RMFS的多機器人路徑規劃問題提出了一種基于動態加權地圖的研究方法,Zhang等[37]和夏清松等[39]也利用圖的表示方式對多機器人的路徑規劃問題進行了研究,如圖10為RMFS的路徑規劃及其圖表示。
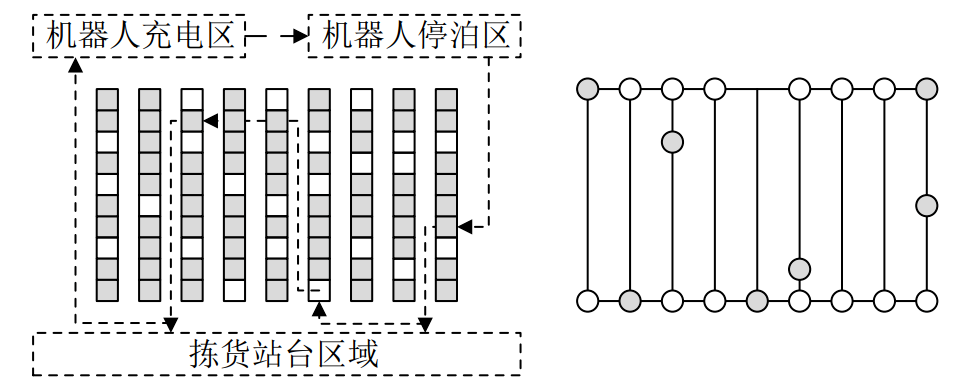
圖10?RMFS路徑規劃及其圖表示 3)機器學習方法
機器學習作為一種基于經驗的學習方法,已經成功地應用于圖像識別和自然語言處理等領域,Dou等[25]最先利用強化學習方法研究了RMFS的路徑規劃問題,證明了將機器學習方法用于RMFS優化研究的可行性和有效性,Zhang等[47]則進一步將強化學習與進化計算組合對RMFS快遞分揀倉庫布局的自動化設計進行了研究,此外神經網絡[114]、深度學習[115]等機器學習方法也被廣泛地用于求解多機器人任務分配、路徑規劃以及障礙物識別等問題,例如,Li等[116]和Zhu等[117]分別利用神經網絡研究了多機器人的動態路徑規劃和任務分配問題;Heo等[118]利用深度學習研究工業協作機器人的障礙物識別問題。基于強化學習的RMFS優化框架如圖11所示,可以看出,RMFS系統中的機器人、貨架、商品、訂單、揀貨/補貨站臺以及揀貨員等要素可視為Agent,這里的環境為RMFS系統,Agent執行的動作 可以是貨位指派、訂單分批、任務分配以及路徑規劃的策略或規則,Agent通過動作影響環境,更新環境狀態
可以是貨位指派、訂單分批、任務分配以及路徑規劃的策略或規則,Agent通過動作影響環境,更新環境狀態 ,并從環境獲得反饋
,并從環境獲得反饋 [119]。
[119]。
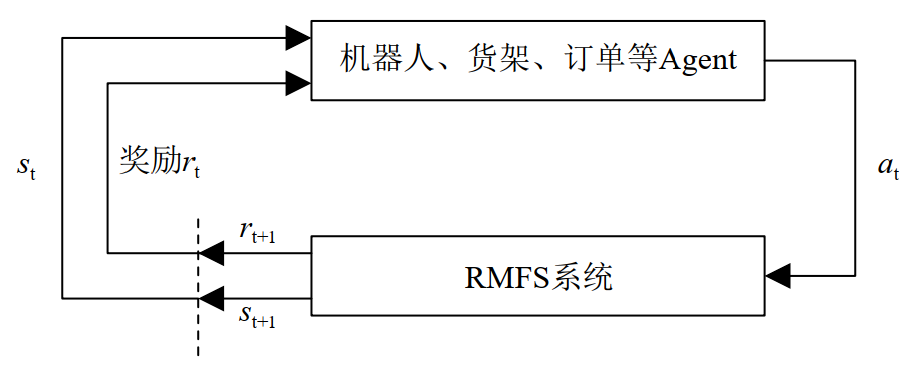
圖11?基于強化學習的RMFS優化框架 4)數據挖掘方法
RMFS的商品和貨架儲位指派需考慮商品銷售的關聯關系和暢銷程度,訂單分批也需知道商品之間的關聯強度,任務分配和路徑規劃則需預測任務及資源的可用性,這些問題均可用聚類、預測等數據挖掘方法進行研究。例如Chen等[78]和Al-Araidah等[89]分別利用聚類的方法對訂單分批問題進行了研究,Pang等[69]則進一步利用關聯規則方法挖掘商品之間的需求關系,最終實現了商品儲位指派優化。
5)Agent建模方法
基于Agent的建模方法(Agent-based modeling,ABM)是一種分布式的建模方法,可對主體的微觀行為進行刻畫,并可以觀察宏觀層面涌現的系統特征,更適合對復雜系統的建模[120]。 RMFS作為分布式多Agent系統,可利用ABM方法進行建模研究,將整個揀貨系統中的移動貨架、機器人、揀選(補貨)站臺等看作自主決策的Agent,每個Agent都具有特定的行為規則、特征和屬性,以一定規則在揀貨系統中獨立決策、自主運行,并與系統中其它Agent和環境進行交互。 ABM的目標是對這些規則和交互關系進行調整和優化,實現整個揀貨系統的狀態最優。基于Agent的RMFS多機器人運作結構如圖12所示,ABM可對RMFS的Agent個體與揀貨系統整體進行協調優化[121]。眾多文獻從建模分析[122]、死鎖、路徑規劃[123]等角度通過ABM方法研究多機器人系統,利用ABM方法對RMFS進行建模還需考慮機器人之間的協同合作、避障、時間約束等問題。 Alphabet Soup[124]、RAWSim-O[125]等開源RMFS仿真平臺均基于ABM方法,Bozer等[45]也利用ABM方法驗證了RMFS相比傳統揀貨系統具有更高的揀貨效率和柔性。此外,Swarm、Repast、Netlogo等ABM的建模與仿真平臺也為RMFS的優化研究提供了可靠的技術支撐。
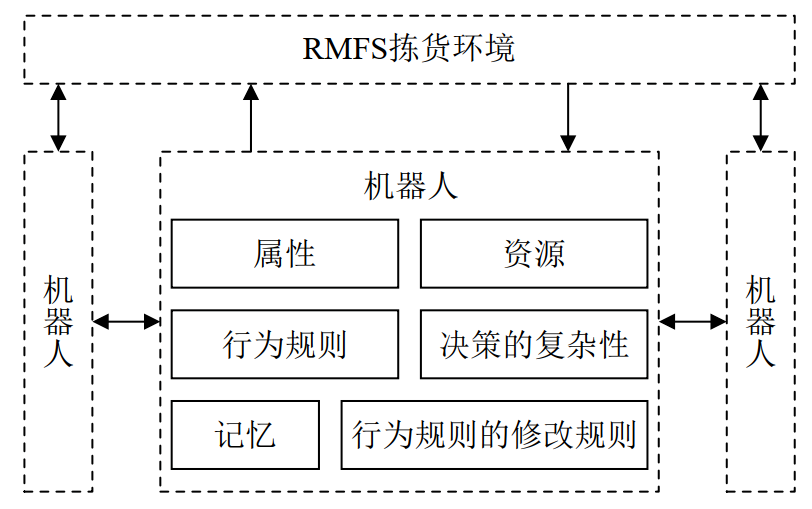
圖12?基于Agent的RMFS多機器人運作結構 6)其他方法
值得特別關注的是,Petkovi?等[48]給出了研究RMFS的全新方法,文章利用隱馬爾科夫模型和心理理論對RMFS揀貨過程中人的意圖進行評價,并通過虛擬現實技術驗證了模型的有效性,這涉及到機器學習、心理學等學科,表明了多學科交叉也是RMFS未來重要的研究方法,例如Keung等[126]利用基于云的網絡物理系統研究了RMFS的避障問題,進一步說明了學科交叉研究的可行性和必要性。
03? 進一步研究方向
有關RMFS的研究起步較晚,現有文獻研究主要集中在系統分析、設計優化以及運作規劃與控制方面,Azadeh等[127]給出了系統分析、設計優化、運作策略以及系統比較4個主要的研究方向,本文則提出以下更為具體的研究方向。
3.1 RMFS倉庫布局及配置研究
從提升RMFS系統揀貨效率的角度出發,針對RMFS的倉庫布局及配置設計和各種設計方案的系統績效評估,提出的進一步的研究方向有: 1)倉庫存儲區形狀對揀貨效率的影響研究。 RMFS存儲區普遍為矩形布置方式(例如圖1(b)所示),在揀貨和補貨站臺位置固定的情況下,倉庫存儲區的長寬比一方面可能會影響揀貨過程機器人的路徑規劃和擁堵情況,導致揀貨效率下降;另一方面當揀貨站臺一側對應的存儲區寬度較窄時,將造成較多存儲暢銷商品的貨架只能存儲在距離揀貨站臺較遠的儲位,最終導致揀貨過程機器人搬運貨架的距離加長、揀貨效率降低。因此,對倉庫存儲區布局的優化是提升RMFS揀貨效率的重要研究方向。 2)揀貨站臺與補貨站臺的比例對揀貨效率的影響研究。 揀貨站臺與補貨站臺的數量比對訂單揀選效率、揀貨與補貨的平衡關系以及揀貨/補貨員的作業負荷都具有重要影響,例如揀貨站臺較少,則可能出現揀貨員作業負荷過大、訂單揀選時間長以及部分補貨站臺空閑的情況;若補貨站臺較少,則會出現補貨員作業負荷過大、庫存商品短缺、訂單揀選時間長以及部分揀貨站空閑的情況;因此,揀貨站臺和補貨站臺比例優化對提升RMFS的揀貨效率具有重要意義。 3)機器人數量、速度、利用率、待命停泊點以及充電策略等因素對揀貨效率的影響研究。 在揀貨過程中,機器人的數量和速度決定了一次性最多能搬運的貨架數量和機器人的行走時間;機器人停泊點則對連續作業機器人的行走距離具有重要影響;機器人充電策略則決定了機器人充電過程的調度方式,對機器人的可用率和貨架搬運效率都具有重要影響。因此,在考慮揀貨成本、資源限制及利用率等因素的情況下,如何合理配置機器人數量、速度以及規劃機器人的充電策略將是未來的重要研究方向。 4)機器人結構設計與操作效能的提升研究。 RMFS機器人的結構設計可分為硬件結構設計和控制系統結構設計,其中硬件結構設計決定了機器人搬運貨架的方式、可承載的最大重量、行駛速度以及充電方式,控制系統結構設計則涉及機器人控制方式(集中控制或分散控制)、避障規則、充電策略以及通信切換等問題。操作效能的提升涉及貨架的一體化設計、揀貨/補貨人員的技能熟練程度等人因問題研究。這方面涉及運籌優化、機械設計以及人因工程的交叉學科研究,對提升RMFS揀貨效率具有重要意義。
3.2 考慮隨機因素及動態情況的RMFS優化研究
從減少理想化假設條件、考慮隨機因素影響和動態情況出發,提出的主要研究方向有: 1)考慮動態情況下的貨位指派、訂單分批、任務分配、路徑規劃研究。 相比靜態問題的研究,動態貨位指派比一次性貨位優化更具優勢,更能反映揀貨過程隨時間的變化規律;動態貨位指派也更加符合實際情況,例如在線訂單分批能根據客戶的動態需求進行更加合理的訂單分批。因此,針對RMFS的商品和貨架儲位動態指派、在線訂單分批、動態任務分配以及動態路徑規劃等問題的研究將是重要的優化方向。2)考慮機器人死鎖、損壞等突發情況的研究。在揀貨過程中,機器人出現故障是難免的,為了保證揀貨過程順利進行并提高機器人的利用率,對揀貨過程機器人死鎖、損壞等突發情況的研究十分必要。 3)考慮訂單取消、插單、退貨等情況的研究。 在電商環境下,客戶可能因多種原因出現取消訂單、催單(訂單加急)以及退貨等情況,雖然已有文獻對RMFS的靜態訂單分批問題進行了初步研究,但未考慮訂單取消、插單等情況,建議在RMFS揀貨優化過程中考慮訂單取消、插單、退貨等情況,此外訂單取消、插單對系統績效的影響評估也可作為一個重點研究方向。 4)考慮揀貨和補貨人員工作負荷、人因以及技能熟練程度對揀貨效率的影響研究。 揀貨和補貨人員的工作負荷、人因以及技能熟練程度對揀貨效率具有重要影響,例如較少的工作負荷容易造成揀貨和補貨人員空閑,較多則會引發疲勞、壓力過大等情況的出現;長時間固定姿勢的勞作容易造成人體機能和器官的損傷(例如揀貨和補貨人員經常彎腰);揀貨人員和補貨人員的技能熟練程度決定了揀貨站臺和補貨站臺的服務速率,對站臺區域的擁堵情況和揀貨效率具有重要影響。雖然人因、技能熟練程度等指標難以量化,但這方面的研究卻十分必要。
3.3 RMFS的資源調度研究
RMFS的調度問題涉及貨架、機器人、訂單、商品、揀貨站臺以及補貨站臺等多種資源,針對RMFS系統的資源調度問題,提出的主要研究方向有: 1)考慮需求關聯性的商品及貨架儲位調度研究。 將需求關聯性強的商品指派到相同貨架存儲,可減少貨架搬運次數;將存儲暢銷商品的貨架指派到靠近揀貨站臺的位置存儲,可降低貨架搬運距離,因此考慮需求關聯性的商品及貨架的儲位調度研究是提高揀貨效率的重要優化方向,這方面研究重點關注商品需求關聯性計算,貨架儲位動態調度等。 2)訂單的分批策略及規則研究。 是采用在線訂單分批還是離線訂單分批、或者同時考慮這二者的混合策略,是將訂單分配給揀貨站臺后再分批還是先分批再分配給揀貨站臺,是根據訂單的相似程度分批還是根據搬運的貨架分批,都是目前RMFS訂單分批優化中亟需解決的問題;并且在線訂單分批需考慮訂單的動態變化關系,相比離線訂單分批更加復雜。 3)機器人與貨架、揀貨/補貨站臺以及充電設施的協同調度策略及規則研究。 機器人是RMFS的主要搬運工具,在揀貨過程中,機器人與貨架、揀貨/補貨站臺以及充電設施之間存在復雜的協同調度關系,包括機器人任務分配和充電設施分配調度等一系列問題,因此,機器人與貨架、揀貨/補貨站臺以及充電設施的協同調度策略及規則研究是RMFS系統優化必須面對的問題。
3.4 多問題協同優化研究
RMFS作為復雜決策系統,貨位指派、訂單分批、任務分配以及路徑規劃等問題之間存在緊密的內在聯系,例如任務分配之前必須完成貨位指派和訂單分批,路徑規劃必須考慮商品及貨架的存儲位置。因此,多個問題的協同優化更加符合RMFS的運作過程,是實現系統全局最優的關鍵,將成為RMFS優化研究的重要趨勢,但多個問題的協同優化研究在問題描述、模型構建、算法設計以及問題求解等方面都更加復雜,后續可重點對多目標(問題)協同優化模型構建、算法設計及問題求解進行深入研究。
3.5 優化方法研究
針對RMFS的優化方法研究提出兩點主要的研究方向: 1)在現有的RMFS仿真軟件的基礎上應開發新的算法和優化模塊。 RMFS的系統效能評估、各因素對揀貨效率的影響等問題可能無法構建精確的優化模型,只能通過離散仿真的方法進行研究。因此,類似Alphabet Soup、RAWSim-O等仿真軟件的開發和應用是必不可少的。 2)設計針對RMFS的求解大規模問題的智能優化算法。 RMFS的應用背景通常是大型電商企業(例如亞馬遜、京東),系統所包含的貨架、機器人、訂單等資源的數量龐大,尤其在面臨類似“雙十一”等促銷活動時,對RMFS的運作效率和服務質量都是極大的挑戰,因此,研究求解大規模問題的智能優化算法尤為重要。
3.6 RMFS與新一代人工智能的交叉研究
隨著通信和信息技術的發展,人工智能發展進入了新階段,2017年7月國務院發布的《新一代人工智能發展規劃》將人工智能定位為國家戰略,明確指出“人工智能技術應用成為改善民生的新途徑”、“人工智能成為帶動我國產業升級和經濟轉型的主要動力”。2014年10月國務院發布的《物流業發展中長期規劃(2014—2020年)》中將物流業定義為支撐國民經濟發展的基礎性、戰略性產業,而RMFS作為一種新型的智能物流倉儲系統,是智能物流的一個重要研究方向,也是我國物流業降本增效、產業升級的主要動力,其研究和應用離不開機器學習、多智能體、大數據、計算機視覺及自然語言處理等新一代人工智能技術的支撐。RMFS與新一代人工智能交叉的研究方向有: 1)基于深度強化學習(Deep reinforcement learning,DRL)的優化研究。 強化學習能夠解決無模型序列決策問題,但在處理高維變量問題時常常會面臨巨大挑戰,而深度學習則具備從高維變量中自動學習表征的能力,DRL則將這兩者結合起來,為RMFS這類復雜高維問題的決策和優化提供了端到端的解決方案,讓RMFS在需求多變的復雜環境中高效完成任務;此外RMFS是一個典型的多Agent系統,這些Agent之間相互合作或競爭,單一Agent系統無法滿足RMFS系統決策的需要,因此可進一步基于多主體的深度強化學習(Multi-agent deep reinforcement learning,MARL)研究RMFS,對RMFS系統中Agent之間的感知發現、知識獲取、競爭合作以及演化進行深入研究,這將成為RMFS智能優化的研究熱點[128]。 2)RMFS機器人操作技能學習研究。 RMFS機器人在完成揀貨和上架任務時,需要執行移動、避障、抓取、放置、拆垛與碼垛等一系列復雜的動作,RMFS機器人的操作技能、執行動作的精確度和效率是RMFS高效運行的關鍵,目前機器人技能大多通過人工預定義的規則實現,無法應對動態復雜的物流場景,讓RMFS機器人通過與環境交互得到經驗數據,從經驗數據中自主學習,一方面可以讓RMFS機器人具有自我優化的能力,同時讓RMFS的任務部署更加靈活和用戶友好。RMFS機器人操作技能自主學習涉及構建機器人操作技能模型、設計學習策略等關鍵問題,已有文獻從動力學與學習算法相結合、DRL等方面開展研究[129],后續研究可關注RMFS機器人高效學習和模型的可解釋,在此基礎上構建RMFS機器人操作技能學習框架。 3) RMFS系統自主學習能力研究。 RMFS機器人在高度動態、復雜多變的環境(商品裝卸、貨架搬運以及各機器人動態移動)下工作,經常會出現碰撞、失效、電量不足等突發情況,如何使RMFS機器人在長期運行中與復雜多變的環境相適應是RMFS的一個研究熱點,這方面涉及到RMFS機器人的環境地圖構建與動態維護、重定位及動態場景感知與理解等基礎任務能力的研究。在RMFS的環境表征的研究方面,可基于數據融合與信息增強,通過多層次傳感器數據融合得到的環境信息來提升RMFS環境表征能力,為RMFS機器人提供更可靠的決策信息,在此基礎上利用DRL的方法在RMFS機器人與環境的交互的基礎上進行學習,提升RMFS機器人自主環境適應能力,這需要解決機器人基于在線獲取的弱標注數據進行學習這一問題,它是使RMFS機器人具有長期自主環境適應能力的關鍵;在場景感知與理解方面建議基于深層次語義信息挖掘來獲取RMFS場景中物體間的屬性關聯,來提升RMFS移動機器人場景認知能力[130]。 4)基于計算機視覺技術和自然語言處理的優化研究。 近年來,機器視覺和自然語言處理研究均取得了重大的理論突破,并分別成功地運用于自動駕駛和機器翻譯等領域,計算機視覺技術可提升RMFS機器人識別商品的準確度;基于語音識別的人機交互技術可提升揀貨效率,例如RMFS機器人通過語音與揀貨員(補貨員)交互降低揀貨(補貨)差錯。 5)基于大數據的優化研究。 大數據是實現智能決策的重要支撐,大數據分析可實現客戶畫像構建、商品銷售分析以及RMFS系統存儲決策優化,因而是RMFS優化研究的重要方向,例如可利用數據挖掘的聚類和關聯規則等算法得到商品銷售頻率和需求關系性,來優化RMFS的訂單分批和貨位指派。
04? 結論
RMFS作為一種新型的“物至人”揀貨系統,相比傳統揀貨系統具有揀貨效率高、柔性強等諸多優勢,隨著電子商務的迅猛發展,RMFS已在物流行業取得成功的應用,同時針對RMFS的優化研究已成為熱點研究領域。 本文主要針對RMFS的貨位指派、訂單分批、任務分配、路徑規劃以及建模方法等問題進行了文獻總結和述評,并給出了未來的研究方向。 以上工作拋磚引玉,以期促進RMFS揀貨效率的進一步提升,使其更好地為電子商務的訂單揀選服務。
編輯:黃飛
?
















 工商網監
工商網監
評論