最近在看工業(yè)機器人的資料,想知道現(xiàn)在的一些市面上的工業(yè)機器人上用的控制控制系統(tǒng)都有哪些廠商呀?
2015-01-23 12:04:01
、抓取、裝配、入庫等訓(xùn)練,2、工業(yè)機器人與視覺實訓(xùn)平臺包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控制系
2021-07-01 06:38:35
工業(yè)機器人中的伺服驅(qū)動的目的是什么?工業(yè)機器人中的關(guān)節(jié)內(nèi)部驅(qū)動結(jié)構(gòu)是怎樣構(gòu)成的?
2021-10-11 08:37:43
,將從驅(qū)動器、電機和本體三個部分來介紹。1、伺服驅(qū)動層機器人關(guān)節(jié)的驅(qū)動是由電機完成的,作為機器人運動控制的最底層,伺服驅(qū)動的目的是改善驅(qū)動器的動態(tài)特性,提高伺服和抗擾性能。常說的三環(huán)控制(位置環(huán)、速度環(huán)
2021-06-28 09:29:31
如題,我在論壇就看到有一位大神講過一本書,《工業(yè)機器人》,煩請論壇小伙伴們多多推薦更多的好書啊。。。
2015-02-03 11:02:31
目錄概述行走軸模型拆分行走軸模型導(dǎo)入仿真軟件創(chuàng)建行走軸機械裝置外部軸配置向?qū)Р寮惭b虛擬機器人系統(tǒng)創(chuàng)建行走軸系統(tǒng)配置機器人安裝到行走軸行走軸運動控制文已經(jīng)首發(fā)在個人微信公眾號:工業(yè)機器人仿真與編程
2021-09-07 08:57:47
隨著機器人性能的提升和價格的下降,以“自動化設(shè)備+工業(yè)機器人操作”取代傳統(tǒng)的“自動化設(shè)備+人工操作”的生產(chǎn)模式將成為PCB行業(yè)轉(zhuǎn)型發(fā)展的趨勢。
2019-10-10 06:54:02
工業(yè)機器人用于各種應(yīng)用。這些包括:處理:能夠操縱像雞蛋一樣多的車門產(chǎn)品,工業(yè)機器人快速強大,靈巧靈敏。應(yīng)用包括從輸送線到包裝的拾取和放置以及機器傾斜,其中原料由機器人進給到諸如注塑機,數(shù)控銑床和車床
2017-09-07 17:20:32
ZNH-KH01工業(yè)機器人應(yīng)用編程考核設(shè)備一、概述工業(yè)機器人應(yīng)用編程考核設(shè)備能滿足工業(yè)機器人應(yīng)用編程1+X相關(guān)標(biāo)準(zhǔn)及技術(shù)規(guī)范,設(shè)備使用智能連接器連接,整個車間設(shè)備互聯(lián)互通,實現(xiàn)大數(shù)據(jù)交換。二、工業(yè)
2021-07-01 11:06:26
機器人電動伺服驅(qū)動系統(tǒng)是利用各種電機產(chǎn)生的力矩和力,好直接或間接地驅(qū)動機器人本體以獲得機器人的各種運動的執(zhí)行機構(gòu)。 對工業(yè)機器人關(guān)節(jié)驅(qū)動的電動機,要求有最大功率質(zhì)量比和扭矩慣量比、高起動轉(zhuǎn)矩、低
2015-01-23 14:33:53
(1)氣動式工業(yè)機器人這類工業(yè)機器人以壓縮空氣來驅(qū)動操作機,其優(yōu)點是空氣來源方便,動作迅速,結(jié)構(gòu)簡單造價低,無污染,缺點是空氣具有可壓縮性,導(dǎo)致工作速度的穩(wěn)定性較差,又因氣源壓力一般只有6kPa左右
2017-12-01 10:47:32
工業(yè)機器人控制器功能多任務(wù)功能一臺機器人可進行多個任務(wù)的操作;
2019-09-12 09:10:22
工業(yè)機器人的定義是什么?有哪些特點?工業(yè)機器人有哪幾個子系統(tǒng)組成?各自的作用是什么?工業(yè)機器人的主要技術(shù)參數(shù)有哪些?
2021-07-05 07:20:36
國內(nèi)減速器、伺服電機市場需求廣闊。一般而言,一套工業(yè)機器人的一個手臂需要配備一個減速器和伺服電機,那一套工業(yè)機器人需要配備4-6個減速器/伺服電機和1套控制系統(tǒng)。根據(jù)世界機器人協(xié)會的預(yù)測
2018-03-21 20:43:41
ZNT-MK01工業(yè)機器人模塊化教學(xué)工作站是什么?ZNT-MK01工業(yè)機器人模塊化教學(xué)工作站有哪些技術(shù)性能?
2021-09-28 07:35:14
ZNL-HJ06型工業(yè)機器人焊接實操工作站是什么?ZNL-HJ06型工業(yè)機器人焊接實操工作站有哪些特點?
2021-09-28 07:39:15
隨著中國制造業(yè)轉(zhuǎn)型步伐的加快,機器人的使用越來越頻繁,作為工廠里的技術(shù)工程師必需了解機器人的相關(guān)技術(shù),那么通用機器人由什么部件組成呢?
2020-05-13 07:45:10
工業(yè)機器人的產(chǎn)業(yè)鏈分為上游核心零部件,中游本體和傳感器等生產(chǎn),以及下游的系統(tǒng)集成等。核心零部件是減速機、伺服系統(tǒng)、控制系統(tǒng)三部分,分別對應(yīng)執(zhí)行系統(tǒng)、驅(qū)動系統(tǒng)、控制系統(tǒng),分別占成本的35%、25
2017-08-23 15:10:27
機器人技術(shù)是綜合了計算機、控制論、機構(gòu)學(xué)、信息和傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域。機器人應(yīng)用情況,是一個國家工業(yè)自動化水平的重要標(biāo)志。
2020-03-27 09:03:30
`工業(yè)機器人的核心部件包括機器人本體、減速器、伺服電機、控制系統(tǒng)等四大部分,這4部分分別占總成本的22%、24%、36%、12%。 筆者從中國國際機器人展覽會上了解到,目前新時達(002527
2015-02-12 10:17:59
工業(yè)機器人一般由主構(gòu)架(手臂)、手腕、驅(qū)動系統(tǒng)、測量系統(tǒng)、控制器及傳感器等組成。 1圖是工業(yè)機器人的典型結(jié)構(gòu)。機器人手臂具有3個自由度(運動坐標(biāo)軸),機器人作業(yè)空間由手臂運動范圍決定。手腕是機器人
2015-01-19 10:36:12
)機器人的系統(tǒng)結(jié)構(gòu)一臺通用的工業(yè)機器人,按其功能劃分,一般由3個相互關(guān)連的部分組成:機械手總成、控制器、示教系統(tǒng),如圖所示。機械手總成是機器人的執(zhí)行機構(gòu),它由驅(qū)動器、傳動機構(gòu)、機器人臂、關(guān)節(jié)、末端操作器
2017-12-15 10:25:19
形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域。機器人應(yīng)用情況,是一個國家工業(yè)自動化水平的重要標(biāo)志。 機器人控制系統(tǒng)是機器人的大腦,是決定機器人功能和性能的主要因素。 工業(yè)機器人控制技術(shù)
2018-11-23 10:40:38
基本一致,只是大小不太一樣,例如iiwa的每個軸基本都是下圖這樣:每一個關(guān)節(jié)中都包含了電機、伺服驅(qū)動、諧波減速器、電機端編碼器、關(guān)節(jié)端位置傳感器和力矩傳感器,電機和減速器采用直連。整個關(guān)節(jié)在機器人內(nèi)部
2018-11-01 11:08:12
的作用。 根據(jù)工業(yè)機器人的發(fā)展趨勢,本書在編寫內(nèi)容上略有偏重。對工業(yè)機器人的運動學(xué)、動力學(xué)、基本控制系統(tǒng)等傳統(tǒng)內(nèi)容的介紹比較簡潔;對機器視覺、機器聽覺和移動機器人的自主定位等新技術(shù)介紹較多,并以可重現(xiàn)
2015-02-03 10:51:09
率機器人系統(tǒng)。電動上電運行前要作如下檢查:1)電源電壓是否合適(過壓很可能造成驅(qū)動模塊的損壞); 對于直流輸入的+/-極性一定不能接錯,驅(qū)動控制器上的電機型號或電流設(shè)定值是否合適(開始時不要太大);2
2018-10-12 10:16:22
,不能僅針對工業(yè)機器人本身的功能和操作進行教學(xué),而是要著眼于工業(yè)機器人工作站系統(tǒng),以實現(xiàn)工業(yè)機器人基本結(jié)構(gòu)和基礎(chǔ)操作、工作站系統(tǒng)調(diào)試和搭建、 ZNL-IR03型 工業(yè)機器人及周邊設(shè)備編程和通訊等內(nèi)容的實訓(xùn)。ZNL-IR03工業(yè)機器人綜合實訓(xùn)平臺桌面型由工業(yè)機器人、實訓(xùn)模塊、氣動工具、基礎(chǔ)臺架和附屬設(shè)備組成,針對
2021-07-01 06:03:08
ZN-IRP01工業(yè)噴涂機器人實訓(xùn)系統(tǒng)一、產(chǎn)品概述ZN-IRP01工業(yè)噴涂機器人實訓(xùn)系統(tǒng)主要針對表面功能性涂層的自動噴涂。通過噴涂系統(tǒng)將涂料從安裝在機器人末端的自動噴槍中噴出,對工件進行噴涂,工作
2021-07-01 10:26:25
請各位大神指導(dǎo),移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
,舵機伺服電機指的是直流電的微型電機,平常我們接觸到的也以直流電的居多。電機的學(xué)問很深,本文只是為初學(xué)者大致講一下制作機器人常用的各種電機。 電機,俗稱“馬達”,是指依據(jù)電磁感應(yīng)定律實現(xiàn)電能的轉(zhuǎn)換
2015-03-06 14:18:58
現(xiàn)在的機器人使用的電機多是什么品牌的呀,還是自己根據(jù)需求定制的呀?
2016-03-15 10:37:57
第二章 機器人系統(tǒng)與控制需求簡介2.1 工業(yè)機器人的系統(tǒng)組成機械本體:精密減速機、伺服電機、伺服驅(qū)動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機器人本體結(jié)構(gòu)與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務(wù)進度的中央處理器發(fā)出位置變化請求時開始的。導(dǎo)航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
直流電機如何實現(xiàn)驅(qū)動控制?機器人上到底用什么電機好?
2021-10-13 07:43:29
感器(External Sensons)。下面將以此為主,結(jié)合機器人傳感器其它分類方法進行闡述。機器人產(chǎn)業(yè)近年來發(fā)展很快,2012年全球產(chǎn)量為16萬臺,歐、美、日等工業(yè)發(fā)達國...
2021-09-16 08:45:39
機器人關(guān)節(jié)是機器人各個零部件之間發(fā)生相對運動的機構(gòu)。關(guān)節(jié)之中,單獨驅(qū)動的為主動關(guān)節(jié),反之稱為從動關(guān)節(jié)。機器人關(guān)節(jié)模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。機器人關(guān)節(jié)電機
2021-05-27 11:26:11
如題。機器人的這個備份系統(tǒng)問題。想求大神講解一下哈。
2015-01-16 10:38:44
的環(huán)境中。據(jù)說每個關(guān)節(jié)都給機器人一個自由度。圖3: 機器人用電池作為驅(qū)動器的圖像開車驅(qū)動器是“發(fā)動機”,驅(qū)動鏈接(連接之間的部分)到他們想要的位置。沒有驅(qū)動器,機器人只能坐在那里,這通常是不可取的。大多數(shù)
2022-03-31 10:31:31
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應(yīng)用有哪些?
2021-07-05 06:48:21
控制或者輸出較高的扭矩;舵機也叫也叫 RC 伺服器,通常用于機器人項目,也可以在遙控汽車,飛機等航模中找到它們。類似舵機這樣的伺服系統(tǒng)通常由小型電動機,電位計,嵌入式控制系統(tǒng)和變速箱組成。電機輸出軸
2021-07-12 08:43:10
這一變化的因素- 無論是比喻含義還是字面含義 - 是使您的現(xiàn)代掃地機器人流暢運行的一個器件 - 電機驅(qū)動。如同今天的家用機器人助手一樣,電驅(qū)動的尺寸持續(xù)縮小,同時性能也在提高。在本文中,我將回顧真空機器人
2022-11-09 07:39:38
ABB機器人伺服電機維修常見故障是什么?
2021-09-29 06:48:18
DeX-Platform提供靈活的硬件方案,滿足不同情況開發(fā)者的需求。本體方案:主要提供負載10kg以內(nèi)的輕型六軸工業(yè)機器人。電機及驅(qū)動系統(tǒng):主要提供使用多摩川17位絕對值編碼的各類伺服電機,及清能德創(chuàng)驅(qū)動器。控制系統(tǒng)
2018-03-02 14:42:06
KUKA庫卡C4機器人驅(qū)動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業(yè)電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
將系統(tǒng)分為算法實現(xiàn)和仿真模塊、DSP控制模塊、及機器人驅(qū)動模塊,以驗證算法的有效性。
KUKA KRAGILUS工業(yè)機器人的實體控制測試:最終,項目工業(yè)機器人的實體控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
本書系統(tǒng)地介紹了工業(yè)機器人的基本組成、機械機構(gòu)、運動學(xué)及動力學(xué)、控制系統(tǒng)、編程與調(diào)試、典型應(yīng)用、管理與維護等內(nèi)容。全書共7章,第1章介紹了工業(yè)機器人的發(fā)展與應(yīng)用、機器人的組成與分類;第2章介紹了工業(yè)
2022-10-16 21:21:57
ZNL-406SCARA工業(yè)機器人一、概述ZNL-406SCARA工業(yè)機器人可以在高速運行時承擔(dān)較高負載,非常適用于需要更大工作范圍或更高有效負載同時擁高速度、低價格的應(yīng)用。機器人時重物取放、包裝
2021-07-01 09:49:25
單元模塊可以拆裝到螺釘級。使學(xué)生更深入了解工業(yè)現(xiàn)場常用的機器人本體內(nèi)部機械結(jié)構(gòu)、連接、電機、減速器、傳動等。
2021-09-17 08:53:31
ZN-MPS03型柔性自動化生產(chǎn)線及工業(yè)機器人應(yīng)用實訓(xùn)系統(tǒng)是什么?ZN-MPS03型柔性自動化生產(chǎn)線及工業(yè)機器人應(yīng)用實訓(xùn)系統(tǒng)有哪些技術(shù)參數(shù)?
2021-09-27 07:12:32
ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺是什么?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺有哪些技術(shù)性能?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺的結(jié)構(gòu)是由哪些部分組成的?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺有哪些配套軟件?
2021-08-09 06:22:03
ZN-ROT01工業(yè)機器人綜合實訓(xùn)平臺由哪些部分組成的?ZN-ROT01工業(yè)機器人綜合實訓(xùn)平臺的特點是什么?
2021-08-18 07:20:52
ZNH-KH01工業(yè)機器人應(yīng)用編程考核設(shè)備有什么功能?ZNH-KH01工業(yè)機器人應(yīng)用編程考核設(shè)備是由哪些部分組成的?
2021-08-16 07:45:01
ZNL-IR03工業(yè)機器人綜合實訓(xùn)平臺是什么?ZNL-IR03工業(yè)機器人綜合實訓(xùn)平臺有哪些特點?ZNL-IR03工業(yè)機器人綜合實訓(xùn)平臺有哪些技術(shù)參數(shù)?
2021-08-16 07:16:23
什么是ZNRX-J2型工業(yè)機器人柔性自動化生產(chǎn)線實訓(xùn)系統(tǒng)?ZNRX-J2型工業(yè)機器人柔性自動化生產(chǎn)線實訓(xùn)系統(tǒng)有哪些技術(shù)參數(shù)?ZNRX-J2型工業(yè)機器人柔性自動化生產(chǎn)線實訓(xùn)系統(tǒng)有哪些功能?
2021-08-10 07:56:56
,70年代起,常與數(shù)字控制機床結(jié)合在一起,成為柔性制造單元或柔性制造系統(tǒng)的組成部分。 工業(yè)機器人由主體、驅(qū)動系統(tǒng)和控制系統(tǒng)三個基本部分組成。主體即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有
2010-05-18 22:03:02
無論是傳統(tǒng)的工業(yè)機器人系統(tǒng),還是當(dāng)今最先進的協(xié)作機器人(Cobot),它們都要依靠可生成大量高度可變數(shù)據(jù)的傳感器。這些數(shù)據(jù)有助于構(gòu)建更佳的機器學(xué)習(xí)(ML)和人工智能(AI)模型。而機器人依靠這些模型變得“自主”,可在動態(tài)的現(xiàn)實環(huán)境中做出實時決策和導(dǎo)航。
2020-08-05 07:08:21
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機驅(qū)動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 中文名: 工業(yè)機器人作者: 蔣剛圖書分類
2016-06-01 13:12:46
機器人驅(qū)動裝置是什么?機器人驅(qū)動裝置系統(tǒng)是由哪些部分組成的?
2021-07-05 07:05:10
在機器人中,執(zhí)行機構(gòu)一般分為液壓驅(qū)動和電機驅(qū)動兩種類型,其中又以電機驅(qū)動最為常見。本文主要討論一般機器人驅(qū)動機構(gòu)中電機的選擇問題。機器人中常用的電機分為有刷直流電機、無刷直流電機、永磁
2021-09-01 06:12:56
在機器人中,執(zhí)行機構(gòu)一般分為液壓驅(qū)動和電機驅(qū)動兩種類型,其中又以電機驅(qū)動最為常見。本文主要討論一般機器人驅(qū)動機構(gòu)中電機的選擇問題。機器人中常用的電機分為有刷直流電機、無刷直流電機、永磁同步電機、步進電機等。其中在中小型機器人(尺寸在15cm-30cm)中,由于價格便宜,...
2021-08-27 07:46:37
。2013年世界工業(yè)機器人銷量18萬臺,需使用減速機90萬臺。工業(yè)機器人的動力源一般為交流伺服電機,因為由脈沖信號驅(qū)動,其伺服電機本身就可以實現(xiàn)調(diào)速,為什么工業(yè)機器人還需要減速器呢?工業(yè)機器人通常執(zhí)行重復(fù)...
2021-09-03 07:10:03
上仍處于領(lǐng)先地位,而日本生產(chǎn)的工業(yè)機器人在數(shù)量、種類方面則居世界首位。工業(yè)機器人由主體、驅(qū)動系統(tǒng)和控制系統(tǒng)三個基本部分組成。主體即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有行走機構(gòu)。大多數(shù)
2015-01-19 10:58:38
什么是機器人控制系統(tǒng)?機器人的運動控制系統(tǒng)包含哪些方面?機器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
以根據(jù)人工智能技術(shù)制定的原則綱領(lǐng)行動。6軸工業(yè)機器人的全部控制由一臺微型計算機完成。另一種是分散式控制,即采用多臺微機來分擔(dān)機器人的控制,如當(dāng)采用上、下兩級微機共同完成機器人的控制時,主機常用于負責(zé)
2017-08-09 16:30:09
工業(yè)機器人的四大特征是哪些?工業(yè)機器人是由哪些部分組成的?工業(yè)機器人是怎樣進行劃分的?
2021-10-11 09:10:17
`華南機器人應(yīng)用培訓(xùn)中心擁有各種設(shè)備,開展各種不同的機器人培訓(xùn)班。打造各種工業(yè)現(xiàn)場常見的機器人工作站,現(xiàn)開展KUKA、發(fā)那科、三菱、ABB、愛普生工業(yè)機器人培訓(xùn)對外招生。 一、認識機器人技術(shù):工業(yè)
2015-09-02 14:03:18
和提高工作效率,就必須引入機器視覺技術(shù)來實現(xiàn)對目標(biāo)的識別和定位。目前,裝備了機器視覺系統(tǒng)的工業(yè)機器人已經(jīng)被應(yīng)用于許多領(lǐng)域。在許多自動化的生產(chǎn)線上,最后一道工序就是把產(chǎn)品擺放整齊,然后打包成型,而許多行業(yè)的產(chǎn)品體積
2021-04-29 09:42:45
OTC、柯馬、杜爾等也主要是在某個工藝領(lǐng)域贏得市場。所以,談起中國機器人品牌的突圍之道,我一直強調(diào),要在某個工藝領(lǐng)域有所突破,占領(lǐng)某個行業(yè)才能找到出路。驅(qū)動系統(tǒng)方面驅(qū)動系統(tǒng)方面國產(chǎn)機器人最大的問題是
2018-10-15 10:46:09
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統(tǒng)的研究是機器人領(lǐng)域中的重要內(nèi)容之一,其研究成果可應(yīng)用在機器人自動避障、軌跡跟蹤和運動目標(biāo)跟蹤等問題中。
2019-09-27 08:07:35
的、多用途的操作機。其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。多軸機器人又稱單軸機械手,工業(yè)機械臂,電缸等,是以XYZ直角坐標(biāo)系統(tǒng)為基本數(shù)學(xué)模型,以伺服電機、步進電機為驅(qū)動的單軸機械臂為
2020-07-29 06:57:04
隨著科學(xué)技術(shù)的發(fā)展與勞動力成本逐年上升,未來世界的工業(yè)發(fā)展中,“機器人換人”將成為一種趨勢。在未來世界的工業(yè),我們可以想像,在車間里,都沒有人,完全都是由機器人進行全自動化生產(chǎn),機器人將代替取代人,而人只要負責(zé)監(jiān)控與控制。大家如何看待工業(yè)機器人代替人?
2016-01-21 18:51:08
?舉例: 工業(yè)機器人系統(tǒng)由三大部分六個子系統(tǒng)組成,1、三大部分是:(1)機械部分(2)傳感部分(3)控制部分2、六個系統(tǒng)(1)驅(qū)動系統(tǒng),要使用機器人的運行起來,就需給各個關(guān)節(jié)即每個運動自由度安置
2016-03-06 12:56:19
youshuang ding在機器人中,執(zhí)行機構(gòu)一般分為液壓驅(qū)動和電機驅(qū)動兩種類型,其中又以電機驅(qū)動最為常見。本文主要討論一般機器人驅(qū)動機構(gòu)中電機的選擇問題。機器人中常用的電機分為有刷直流電機、無刷
2018-10-19 10:31:20
如何選擇掃地機器人的電機?
2021-03-02 07:05:22
脈沖。驅(qū)動器的出廠設(shè)置為 A/B正交脈 沖(No42為0),請將 No42改為3(脈沖 / 方向信號)。 5、機器人交流伺服系統(tǒng)的使用中,能否用伺服 -ON作為控制電機脫 機的信號,以便直接轉(zhuǎn)動電機
2020-06-30 17:54:21
移動機器人是機器人的重要研究領(lǐng)域,人們很早就開始移動機器人的研究。世界上第一臺真正意義上的移動機器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了
2020-05-14 08:15:00
機器人進行聯(lián)系的裝置。 該系統(tǒng)歸納起來分為兩大類: 指令給定裝置和信息顯示裝置。「前沿」拆開工業(yè)機器人,讓你見識機器人驅(qū)動系統(tǒng)中的電機種類!
2018-10-30 15:11:29
的裝置。 該系統(tǒng)歸納起來分為兩大類: 指令給定裝置和信息顯示裝置。:拆開工業(yè)機器人,讓你見識機器人驅(qū)動系統(tǒng)中的電機種類!
2018-10-30 15:02:58
在物流搬運行業(yè),拳頭機器人由于其獨特的并聯(lián)結(jié)構(gòu),常用于高速整列、裝箱等場合。其中,拳頭機器人的視覺線跟蹤技術(shù)正得到廣泛的應(yīng)用,如下圖所示:
2020-08-06 06:30:31
%的市場份額。其實國產(chǎn)工業(yè)機器人也不乏高精尖產(chǎn)品,智久機器人公司已成功開發(fā)出了自己的AGV無人搬運系統(tǒng)、電商自動發(fā)貨系統(tǒng)、物流自動檢貨系統(tǒng)、六軸機械手應(yīng)用等多門類產(chǎn)品,服務(wù)的客戶包括美的、友達、江鈴汽車
2015-12-17 14:53:56
智能搬運機器人能實現(xiàn)小型柱狀物料顏色識別及搬運,能夠輕松完成中國教育機器人大賽的智能搬運競賽任務(wù)。機器人的移動由兩輪伺服電機驅(qū)動,萬向輪協(xié)助轉(zhuǎn)向,并用多個循線傳感器輔助完成復(fù)雜路線導(dǎo)航,前置超聲波
2016-03-24 10:32:24
多涉及諸如電子學(xué)理論或軟件編程等基礎(chǔ)細節(jié),書中提及的理論并不十分高深難懂,也沒有復(fù)雜的數(shù)學(xué)公式,而是重點介紹構(gòu)成機器人的機械、電路、電源、傳感器、直流電機、步進電機、舵機以及常用電子元器件的原理與應(yīng)用電
2012-08-14 23:18:00
招聘:工業(yè)機器人助理/學(xué)徒,工業(yè)機器人儲備工程師,工業(yè)機器人初級工程師晉升渠道:儲備工程師-初級工程師-中級工程師-高級工程師-管理-研發(fā)公司福利:儲備工程師薪資待遇4000+績效獎金+加班獎金+節(jié)日福利獎金轉(zhuǎn)正后初級工程師5000+績效獎金+加班獎金+項目提成+技能補貼+節(jié)日***
2020-02-12 09:45:59
隨著計算機科學(xué)和自動控制技術(shù)的發(fā)展,越來越多的不同種類的智能機器人出現(xiàn)在工廠、生活當(dāng)中,機器人視覺系統(tǒng)作為智能機器人系統(tǒng)中一個重要的子系統(tǒng),也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
ZNJS-3型模塊式柔性環(huán)形自動生產(chǎn)線及工業(yè)機器人應(yīng)用實驗系統(tǒng)有哪些功能?ZNJS-3型 模塊式柔性環(huán)形自動生產(chǎn)線及工業(yè)機器人應(yīng)用實驗系統(tǒng)有哪些技術(shù)性能?
2021-09-26 06:18:15
的6軸關(guān)節(jié)式操作機,它由驅(qū)動器、傳動機構(gòu)、機械手臂、關(guān)節(jié)以及內(nèi)部傳感器等組成。2、機器人控制柜:它是機器人系統(tǒng)的神經(jīng)中樞,包括計算機硬件、軟件和一些專用電路,負責(zé)處理機器人工作過程中的全部信息和控制其
2020-11-16 16:18:45
常用的電機有哪些。機器人常用的電機包含三種:普通的直流電機、伺服電機、步進電機。直流電機1.直流電機輸出或輸入為直流電能的旋轉(zhuǎn)電機,稱為直流電機,它是能實現(xiàn)直流電能和機械能互相轉(zhuǎn)換的電機。當(dāng)它作電動機
2018-10-25 11:50:39
請問工業(yè)機器人有什么優(yōu)劣勢?
2021-06-18 06:04:14
現(xiàn)如今工業(yè)機器人的種類非常多,從材料搬運到機器維護,從焊接到切割。工業(yè)機器人制造商開發(fā)了適用于各種應(yīng)用的機器人產(chǎn)品。由于種類繁多,很多客戶購買工業(yè)機器人時不知道如何去選擇適合自己生產(chǎn)車間的機器人
2017-08-26 10:37:02
,年均增長31%,預(yù)計2023年我國工業(yè)機器人市場增速將在20%至25%左右,仍會維持較快的增速。 飛凌嵌入式作為一家專注嵌入式核心控制系統(tǒng)研發(fā)與制造的高新技術(shù)企業(yè),經(jīng)過多年的研發(fā)與積累,產(chǎn)品已廣泛應(yīng)用
2023-02-24 17:05:21
介紹DELTA并聯(lián)機器人的基礎(chǔ)知識與系統(tǒng)設(shè)計原理,并結(jié)合ABB和FANUC機器人,介紹了工業(yè)生產(chǎn)中的常用并聯(lián)機器人機型與編程操作。本書依據(jù)學(xué)習(xí)者的認知規(guī)律,側(cè)重工業(yè)機器人的技術(shù)要點,通過相關(guān)典型實例講解
2018-10-29 17:03:22
江智黨建機器人是經(jīng)過多年的市場沉淀 ;現(xiàn)已可以提供系統(tǒng) 全方位的黨建機器人服務(wù)
2022-06-21 07:59:59
定位, 且轉(zhuǎn)動慣性小,動態(tài)響應(yīng)快。主要應(yīng)用包括自動化生產(chǎn)線,機器人關(guān)節(jié),機器人關(guān)節(jié)、醫(yī)醫(yī)療儀器及設(shè)備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應(yīng)用。
2023-04-18 17:35:19
定位, 且轉(zhuǎn)動慣性小,動態(tài)響應(yīng)快。主要應(yīng)用包括自動化生產(chǎn)線,機器人關(guān)節(jié),機器人關(guān)節(jié)、醫(yī)醫(yī)療儀器及設(shè)備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應(yīng)用。
2023-04-20 10:07:10
機器人電動伺服驅(qū)動系統(tǒng)是利用各種電動機產(chǎn)生的力矩和力,直接或間接地驅(qū)動機器人本體以獲得機器人的各種運動的執(zhí)行機構(gòu)。 對工業(yè)機器人關(guān)節(jié)驅(qū)動的電動機,要求有最大功率質(zhì)量比和扭矩慣量比、高起動轉(zhuǎn)矩、低慣量
2020-06-28 17:58:23 5895
5895 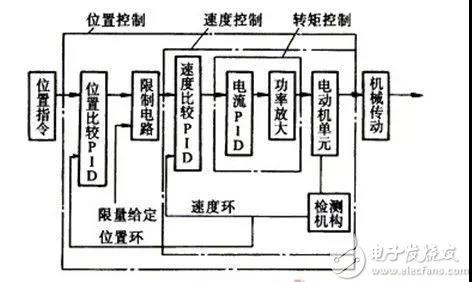
電動機從獲得指令信號到完成指令所要求的工作狀態(tài)的時間應(yīng)短。響應(yīng)指令信號的時間愈短,電伺服系統(tǒng)的靈敏性愈高,快速響應(yīng)性能愈好,一般是以伺服電動機的機電時間常數(shù)的大小來說明伺服電動機快速響應(yīng)的性能。
2019-08-22 10:45:173127 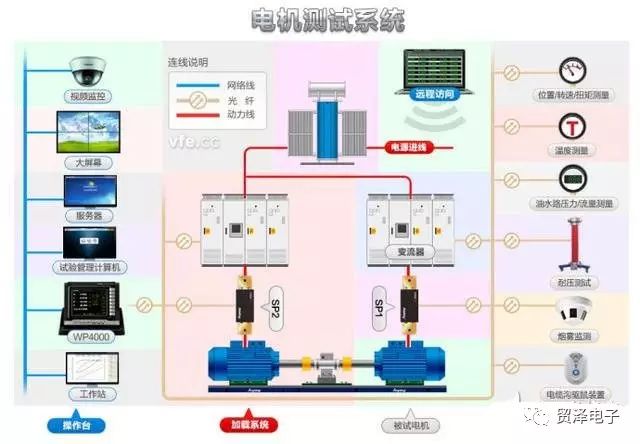
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論