 電子發燒友App
電子發燒友App


1 引言
數字化家庭是未來智能小區系統的基本單元。所謂“數字化家庭”就是基于家庭內部網絡提供覆蓋整個家庭的智能化服務,包括數據通信、家庭娛樂和信息家電控制功能。
數字化家庭設計的一項主要內容是通信功能的實現,包括家庭與外界的通信及家庭內部相關設施之間的通信。從現在的發展來看,外部的通信主要通過寬帶接入。Intenet,而家庭內部的通信,筆者采用目前比較具有競爭力的藍牙(Bluetootlh)無線接入技術。
傳統的數字化家庭采用PC進行總體控制,缺乏人性化。筆者根據人工情感的思想設計一種配備多種外部傳感器的智能機器人,將此智能機器人視作家庭成員,通過它實現對數字化家庭的控制。
本文主要就智能機器人在數字化家庭醫療保健方面的應用進行模型設計,在智能機器人與醫療儀器和控制PC的通信采用藍牙技術。整個系統的成本較低,功能較為全面,擴展應用非常廣闊,具有極大的市場潛力。
2 智能機器人的總體設計
2.1 智能機器人的多傳感器系統
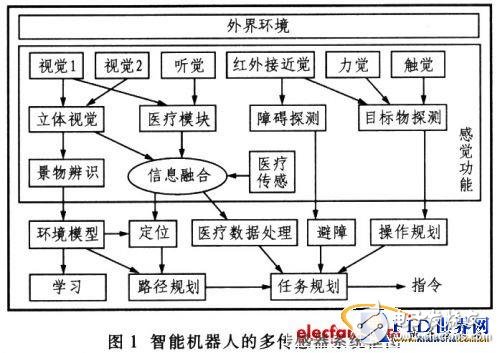
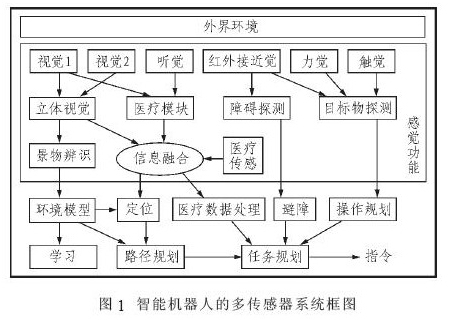
機器人智能技術中最為重要的相關領域是機器人的多感覺系統和多傳感信息的集成與融合[1],統稱為智能系統的硬件和軟件部分。視覺、聽覺、力覺、觸覺等外部傳感器和機器人各關節的內部傳感器信息融合使用,可使機器人完成實時圖像傳輸、語音識別、景物辨別、定位、自動避障、目標物探測等重要功能;給機器人加上相關的醫療模塊(CCD、CAMERA、立體麥克風、圖像采集卡等)和專用醫療傳感器部件,再加上醫療專家系統就可以實現醫療保健和遠程醫療監護功能。智能機器人的多傳感器系統框圖如圖1所示。
2.2 智能機器人控制系統
機器人控制系統包含2部分:一是上位機,一般采用PC,它完成機器人的運動軌跡規劃、傳感器信息融合控制算法、視覺處理、人機接口及遠程處理等任務;二是下位機,一般采用多單片機系統或DSP等作為控制器的核心部件,完成電機伺服控制、反饋處理、圖像處理、語音識別和通信接口等功能。
如果采用多單片機系統作為下位機,每個處理器完成單一任務,通過信息交換和相互協調完成總體系統功能,但其在信號處理能力上明顯有所欠缺。由于DSP擅長對信號的處理,而且對此智能機器人來說經常需要信號處理、圖像處理和語音識別,所以采用DSP作為智能機器人控制系統的控制器[2]。
控制系統以DSP(TMS320C54x)為核心部件,由藍牙無線通信、GSM無線通信(支持GPRS)、電機驅動、數字羅盤、感覺功能傳感器(視覺和聽覺等)、醫療傳感器和多選一串口通信(Rs-232)模塊等組成,控制系統框圖如圖2所示。
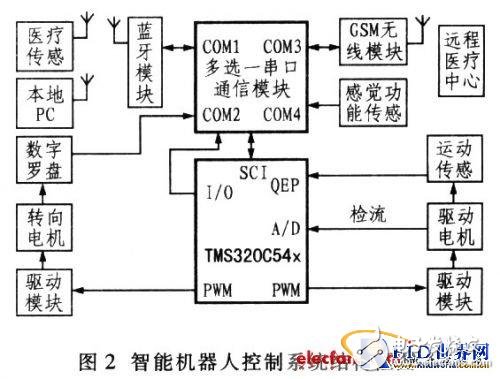
(1)系統通過驅動電機和轉向電機控制機器人的運動,轉向電機利用數字羅盤的信息作為反饋量進行PID控制。
(2)采用愛立信(Ericsson)公司的ROKl01007型電路作為藍牙無線通信模塊,實現智能機器人與上位機Pc的通信和與其他基于藍牙模塊的醫療保健儀器的通信。
(3)支持GPRS的GSM無線通信模塊支持數據、語音、短信息和傳真服務,采用手機通信方式與遠端醫療監控中心通信。
(4)由于TMS320C54x只有1個串行口,而藍牙模塊、GSM無線模塊、數字羅盤和視覺聽覺等感覺功能傳感器模塊都是采用RS一232異步串行通信,所以必須設計1個多選一串口通信模塊進行轉換處理。當TMS320C54x需要藍牙無線通信模塊的數據時通過電路選通;當T~MS320C54x需要某個傳感器模塊的數據時,關斷上次無線通信模塊的選通,同時選通該次傳感器模塊。這樣,各個模塊就完成了與1~MS320C54x的串口通信。
3 主要醫療保健功能的實現
智能機器人對于數字化家庭的醫療保健可以提供如下的服務:
(1)醫療監護
通過集成有藍牙模塊的醫療傳感器對家庭成員的主要生理參數如心電、血壓、體溫、呼吸和血氧飽和度等進行實時檢測,通過機器人的處理系統提供本地結果。
(2)遠程診斷和會診
通過機器人的視覺和聽覺等感覺功能,將采集的視頻、音頻等數據結合各項生理參數數據傳給遠程醫療中心,由醫療中心的專家進行遠程監控,結合醫療專家系統對家庭成員的健康狀況進行會診,即提供望(視頻)、聞、問(音頻)、切(各項生理參數)的服務[3]。
3.1 機器人視覺與視頻信號的傳輸
機器人采集的視頻信號有2種作用:提供機器人視覺;將采集到的家庭成員的靜態圖像和動態畫面傳給遠程醫療中心。
機器人視覺的作用是從3維環境圖像中獲得所需的信息并構造出環境對象的明確而有意義的描述。視覺包括3個過程:
(1)圖像獲取。通過視覺傳感器(立體影像的CCD CAMERA)將3維環境圖像轉換為電信號。
(2)圖像處理。圖像到圖像的變換,如特征提取。
(3)圖像理解。在處理的基礎上給出環境描述。
通過視頻信號的傳輸,遠程醫療中心的醫生可以實時了解家庭成員的身體狀況和精神狀態。智能機器人根據醫生的需要捕捉適合醫療保健和診斷需求的圖像,有選擇地傳輸高分辨率和低分辨率的圖像。在醫療保健的過程中,對于圖像傳送有2種不同條件的需求:
(1)醫生觀察家庭成員的皮膚、嘴唇、舌面、指甲和面部表情的顏色時,需要傳送靜態高清晰度彩色圖像;采用的方法是間隔一段時間(例如5分鐘)傳送1幅高清晰度靜態圖像。
(2)醫生借助動態畫面查看家庭成員的身體移動能力時,可以傳送分辨率較低和尺寸較小的圖像,采用的方法是進行合理的壓縮和恢復以保證實時性。
3.2 機器人聽覺與音頻信號的傳輸
機器人采集的音頻信號也有2種作用:一是提供機器人聽覺;二是借助于音頻信號,家庭成員可以和醫生進行溝通,醫生可以了解家庭成員的健康狀況和心態。音頻信號的傳輸為醫生對家庭成員進行醫療保健提供了語言交流的途徑。
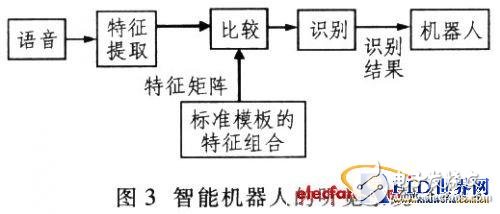
機器人聽覺是語音識別技術,醫療保健智能機器人帶有各種聲交互系統,能夠按照家庭成員的命令進行醫療測試和監護,還可以按照家庭成員的命令做家務、控制數字化家電和照看病人等。
聲音的獲取采用多個立體麥克風。由于聲音的頻率范圍大約是300Hz一3400Hz,過高或過低頻率的聲音在一般情況下是不需要傳輸的,所以只用傳送頻率范圍在1000Hz-3000Hz的聲音,醫生和家庭成員就可以進行正常的交流,從而可以降低傳輸音頻信號所占用的帶寬,再采用合適的通信音頻壓縮協議即可滿足實時音頻的要求。智能機器人的聽覺系統如圖3所示。
3.3 各項生理信息的采集與傳輸
傳統檢測設備通過有線方式連到人體上進行生理信息的采集,各種連線容易使病人心情緊張,從而導致檢測到的數據不準確。使用藍牙技術可以很好地解決這個問題,帶有藍牙模塊的醫療微型傳感器安置在家庭成員身上,盡量使其不對人體正常活動產生干擾,再通過藍牙技術將采集的數據傳輸到接收設備并對其進行處理。
在智能機器人上安裝1個帶有藍牙模塊的探測器作為接收設備,各種醫療傳感器將采集到的生理信息數據通過藍牙模塊傳輸到探測器,探測器有2種工作方式:一是將數據交給智能機器人處理,提供本地結果;二是與Internet連接(也可以通過GSM無線模塊直接發回),通過網絡將數據傳輸到遠程醫療中心,達到醫療保健與遠程監護的目的。視頻和音頻數據的傳輸也采用這種方式。智能機器人的數據傳輸系統如圖4所示。

4 藍牙模塊的應用
4.1 藍牙技術概況
藍牙技術[4]是用于替代電纜或連線的短距離無線通信技術。它的載波選用全球公用的2.4GHz(實際射頻通道為 f=2402+k×1MHz,k=0,1,2,…,78)ISM頻帶,并采用跳頻方式來擴展頻帶,跳頻速率為1600跳/s。可得到79個1MHz帶寬的信道。藍牙設備采用GFSK調制技術,通信速率為1Mbit/s,實際有效速率最高可達721Kbit/s,通信距離為10m,發射功率為1mW;當發射功率為100mW時,通信距離可達100m,可以滿足數字化家庭的需要。
4.2 藍牙模塊
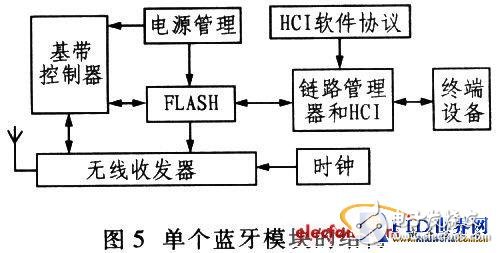
ROKl01007型藍牙模塊[5]是愛立信公司推出的適合于短距離通信的無線基帶模塊。它的集成度高、功耗小(射頻功率為1mW),支持所有的藍牙協議,可嵌入任何需要藍牙功能的設備中。該模塊包括基帶控制器、無線收發器、閃存、電源管理模塊和時鐘5個功能模塊,可提供高至HCI(主機控制接口)層的功能。單個藍牙模塊的結構如圖5所示。
4.3 主、從設備硬件組成
藍牙技術支持點到點PPP(Point-t0-Point Pro-tocol)和點對多點的通信,用無線方式將若干藍牙設備連接成1個微微網[6]。每個微微網由1個主設備(Master)和若干個從設備 (Slave)組成,從設備最多為7臺。主設備負責通信協議的動作,MAC地址用3位來表示,即在1個微微網內可尋址8個設備(互聯的設備數量實際是沒有限制的,只不過在同一時刻只能激活8個,其中1個為主,7個為從)。從設備受控于主設備。所有設備單元均采用同一跳頻序列。
將帶有藍牙模塊的微型醫療傳感器作為從設備,將智能機器人上的帶有藍牙模塊的探測器作為主設備。主從設備的硬件主要包括天線單元、功率放大模塊、藍牙模塊、嵌入式微處理器系統、接口電路及一些輔助電路。主設備是整個藍牙網絡的核心部分,要完成各種不同通信協議之間的轉換和信息共享,以及同外部通信網絡之間的數據交換功能,同時還負責對各個從設備的管理和控制。
5 結束語
隨著社會的進步,經濟的發展和人民生活水平的提高,越來越多的人需要家庭醫療保健服務。文中提出的應用于數字化家庭醫療保健服務的智能機器人系統的功能較為全面,且在家用智能機器人、基于藍牙技術的智能家居和數字化醫院等方面的拓展應用非常廣闊,具有極大的市場潛力。









 工商網監
工商網監
評論