 電子發(fā)燒友App
電子發(fā)燒友App


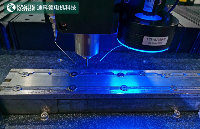
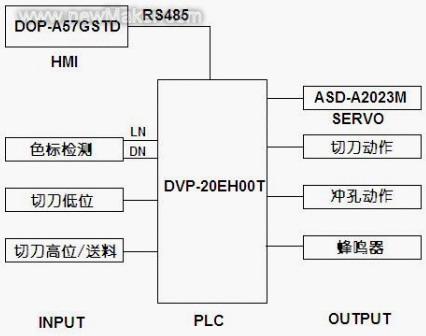
基于臺(tái)達(dá)PLC的鉆孔加工中心
摘要:主要討論臺(tái)達(dá)28SV11T型PLC在鉆孔中心機(jī)中的應(yīng)用。工藝主要分為中心站流程、深孔鉆流程、鉸/鏜刀加工流程以及自動(dòng)換刀流程等。
關(guān)鍵詞:28SV PLC VFD-V變頻器 PG05 定位功能
1 引言
近年臺(tái)達(dá)推出多款PLC及通訊模塊,其中28SV型晶體管輸出PLC以其強(qiáng)大的脈沖采集、脈沖輸出功能,以及對(duì)豐富的位置控制指令的支持受到極大的關(guān)注,表現(xiàn)出了廣闊的應(yīng)用前景。
28SV11T主機(jī)在鉆孔中心機(jī)上的應(yīng)用,使用到內(nèi)建的四路200K高速脈沖輸出控制3臺(tái)V系列變頻器(通過擴(kuò)展PG卡)的速度以及一臺(tái)三菱伺服的定位,使其在不同的工序中方便的切換不同的加工速度,保證在不同的加工工序中,如鉆孔、鏜孔中的加工精度。
2 鉆孔加工中心工藝流程
自動(dòng)加工流程
自動(dòng)加工流程又分為三個(gè)工藝流程,分別為中心鉆加工流程、深孔鉆加工流程以及鉸刀&鏜刀加工流程,具體如下:
(1)中心鉆加工流程
啟動(dòng)信號(hào)
Y20=OUT Y30=OUT Y40=OUTX63=1 X64=0 中心鉆
伺服往工件方向快速移動(dòng),到設(shè)定工件坐標(biāo)零點(diǎn)(中心鉆)Y0 Y1
伺服進(jìn)給速度,深度 加工(用戶可調(diào)整)主軸轉(zhuǎn)速中心鉆 Y60=1切削液 Y55=1
進(jìn)給動(dòng)作完成,退到工件坐標(biāo)零點(diǎn),①②③油壓回轉(zhuǎn)盤執(zhí)行回轉(zhuǎn)動(dòng)作流程
回轉(zhuǎn)動(dòng)作完成 伺服進(jìn)給速度,深度 加工
進(jìn)給動(dòng)作完成,退到工件坐標(biāo)零點(diǎn),①②③油壓回轉(zhuǎn)盤執(zhí)行回轉(zhuǎn)動(dòng)作流程
回轉(zhuǎn)動(dòng)作完成 伺服進(jìn)給速度,深度 加工
執(zhí)行自動(dòng)模式下?lián)Q刀流程
(2)深孔鉆加工流程
啟動(dòng)信號(hào)
Y20=OUT Y30=OUT Y40=OUTX63=0 X64=1 深孔鉆
伺服往工件方向快速移動(dòng),到設(shè)定工件坐標(biāo)零點(diǎn)(深孔鉆) Y0 Y1
伺服進(jìn)給速度,深度 啄式鉆孔加工(用戶可調(diào)整)主軸轉(zhuǎn)速深孔鉆 Y61=1切削液 Y55=1鉆把手孔動(dòng)力頭動(dòng)作
進(jìn)給動(dòng)作完成,退到工件坐標(biāo)零點(diǎn),①②③油壓回轉(zhuǎn)盤執(zhí)行回轉(zhuǎn)動(dòng)作流程
回轉(zhuǎn)動(dòng)作完成 伺服進(jìn)給速度,深度 啄式鉆孔加工鉆把手孔動(dòng)力頭動(dòng)作
進(jìn)給動(dòng)作完成,退到工件坐標(biāo)零點(diǎn),①②③油壓回轉(zhuǎn)盤執(zhí)行回轉(zhuǎn)動(dòng)作流程
回轉(zhuǎn)動(dòng)作完成 伺服進(jìn)給速度,深度 啄式鉆孔加工鉆把手孔動(dòng)力頭動(dòng)作
執(zhí)行自動(dòng)模式下?lián)Q刀流程
(3)鉸刀&鏜刀加工流程
啟動(dòng)信號(hào)
Y20=OUT Y30=OUT Y40=OUTX63=1 X64=1 鉸刀&鏜刀
伺服往工件方向快速移動(dòng),到設(shè)定工件坐標(biāo)零點(diǎn)(鉸刀&鏜刀)
伺服進(jìn)給速度,深度 加工(用戶可調(diào)整)主軸轉(zhuǎn)速鉸刀&鏜刀 Y62=1切削液 Y55=1
進(jìn)給動(dòng)作完成,退到工件坐標(biāo)零點(diǎn),①②③油壓回轉(zhuǎn)盤執(zhí)行回轉(zhuǎn)動(dòng)作流程
回轉(zhuǎn)動(dòng)作完成 伺服進(jìn)給速度,深度 加工
進(jìn)給動(dòng)作完成,退到工件坐標(biāo)零點(diǎn),①②③油壓回轉(zhuǎn)盤執(zhí)行回轉(zhuǎn)動(dòng)作流程
回轉(zhuǎn)動(dòng)作完成 伺服進(jìn)給速度,深度 加工
執(zhí)行自動(dòng)模式下?lián)Q刀流程
加工完成
2.2 換刀流程
換刀流程分為自動(dòng)模式下?lián)Q刀流程以及手動(dòng)模式下?lián)Q刀流程兩種。
(1)自動(dòng)模式下?lián)Q刀流程
伺服執(zhí)行回原點(diǎn)動(dòng)作 (如在原點(diǎn)則跳過)X15 原點(diǎn)回復(fù)標(biāo)志
中途換刀緩沖點(diǎn)X16 ON 則停止回原點(diǎn)動(dòng)作 轉(zhuǎn)為慢速下至換刀點(diǎn)X17 ON
中途沒有檢測(cè)到換刀緩沖點(diǎn)則回原點(diǎn)后 轉(zhuǎn)快速下,檢測(cè)到換刀緩沖點(diǎn)X16 ON 轉(zhuǎn)為慢速下至換刀點(diǎn)X17 ON
變頻器執(zhí)行主軸定角度動(dòng)作 定角度標(biāo)志X51
刀庫前進(jìn) X57 ON
主軸上方打刀缸松刀動(dòng)作 X20 X30 X40 ON
伺服執(zhí)行回原點(diǎn)動(dòng)作 X15
刀庫旋轉(zhuǎn)一工位 執(zhí)行完成 X52 X55 ON
刀庫旋轉(zhuǎn)完成,確認(rèn)定角度正常,打刀缸松刀狀態(tài)正常X20 X30 X40 仍為ON
伺服快速下,檢測(cè)到換刀緩沖點(diǎn) X16 ON 轉(zhuǎn)為慢速下至換刀點(diǎn) X17 ON
打刀缸返回 X50 ON
刀庫回退 X57 ON
(2)手動(dòng)模式下?lián)Q刀流程
原點(diǎn):刀庫前進(jìn)、刀庫后退、刀庫旋轉(zhuǎn)、刀庫定位硬按鍵X21 X31 X41單個(gè)打刀缸松刀動(dòng)作、主軸定角度 X15 回原點(diǎn)標(biāo)志
換刀點(diǎn)及主軸定角度完成:刀庫前進(jìn)、刀庫后退,X17 ON 定角度標(biāo)志
換刀點(diǎn)及主軸定角度完成及刀庫前進(jìn)到位:交替式軟按鍵(人機(jī)界面上)所有打刀缸松刀動(dòng)作(交替式),X17 ON 定角度標(biāo)志 X57 ON
換刀點(diǎn)及主軸定角度完成及刀庫前進(jìn)到位及松刀狀態(tài)正常:伺服可執(zhí)行慢速上下
任意點(diǎn)(刀庫后退原位):硬按鍵單個(gè)打刀缸松刀動(dòng)作伺服可執(zhí)行給定速度上下
雙手操作可執(zhí)行 自動(dòng)模式下?lián)Q刀流程
3 變頻調(diào)速及定位控制
變頻調(diào)速
使用臺(tái)達(dá)V系列變頻器,選配PG05編碼器卡,通過PLC主機(jī)發(fā)送脈沖的頻率來控制變頻器的轉(zhuǎn)速。設(shè)置參數(shù)時(shí)需要設(shè)置變頻器頻率指令來源為脈沖輸入。這里,需要將變頻器【00-20】參數(shù)設(shè)為4或者6,本應(yīng)用中,變頻器轉(zhuǎn)向不需要改變,因而設(shè)定為4。其他必要的參數(shù),不是本文檔說明的重點(diǎn),在這里不作詳述。
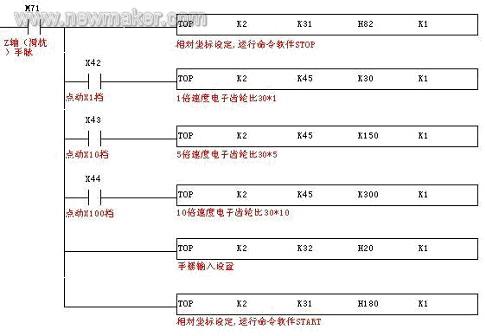
3.2定位功能
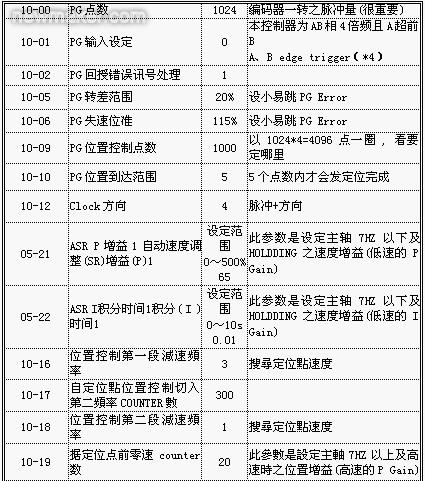
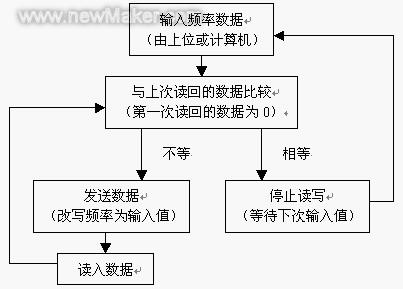
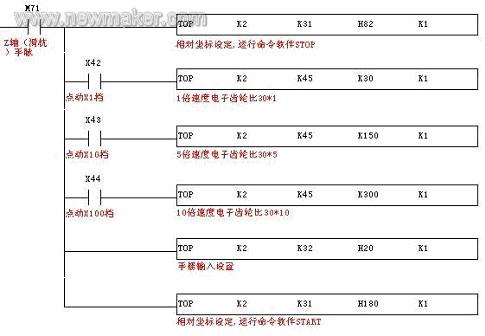
在換刀流程中,換刀前需要先將刀具轉(zhuǎn)到一個(gè)合適的角度,以便于刀庫準(zhǔn)確的抓取。換刀流程的位置參數(shù)來源于編碼器PG,編碼器定位控制原理如圖1所示,主要參數(shù)如表1所示。

圖1 編碼器定位控制原理
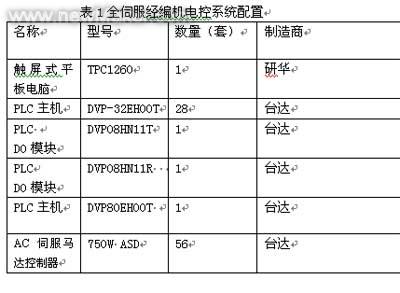
表1 編碼器PG參數(shù) 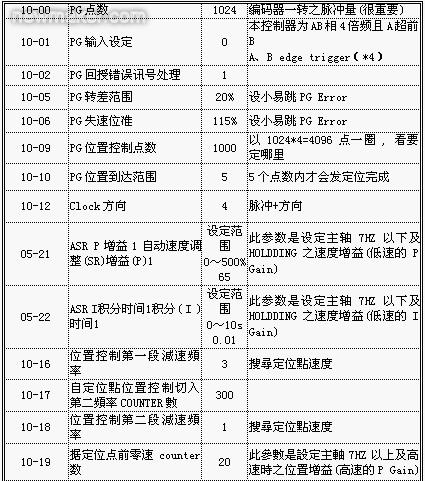
4 結(jié)束語
隨著臺(tái)達(dá)28SV型PLC各種功能擴(kuò)展模塊的推出,其在網(wǎng)絡(luò)連接、現(xiàn)場總線方面的應(yīng)用都有了更好的表現(xiàn),連同定位功能,所有這些優(yōu)異性能都預(yù)示其廣闊的應(yīng)用前景。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論