 電子發燒友App
電子發燒友App


摘 要:在對數控磨溝機產品原理分析的基礎上,論述了基于艾默生CT EC20H高速運動控制型PLC在機床數控集成自動化系統設計中的應用。對于需要多軸插補功能的機電伺服控制領域,艾默生CT EC20H產品表現出強大的技術優勢。
關鍵詞:PLC 磨溝機 伺服 EC20H
1 引言
磨床屬于金屬工件表面精密加工機床。磨床基本原理是用砂輪或油石(刃具)對零件表面做淺深度微量切削加工。磨削時的切削深度很小,在一次行程中所能切除的金屬層很薄。磨具旋轉為主運動,工件或磨具的移動為進給運動。磨床加工精度高、表面粗糙度Ra值小。磨削加工可以獲得較高的加工精度和很小的表面粗糙度值。磨削不但可以加工軟材料,如未淬火鋼、鑄鐵和有色金屬等,而且還可以加工淬火鋼及其他刀具不能加工的硬質材料如陶瓷與硬質合金等。
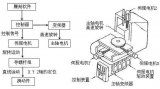
數控磨溝機屬于磨床的一種,主要用于磨制絲錐鉆頭等硬質合金工具排屑槽,屬于比較冷僻的專用機械加工設備,用量不大,生產廠家也比較少,以進口設備為主。由于數控磨溝機對控制系統的要求較高,難度也比較大,本項目研發幾乎用到了艾默生CT EC20H型高速運動控制專用PLC的全部重要功能。數控磨溝機外形參見圖1。
圖1 數控磨溝機
2 數控磨溝機概念設計
2.1 系統需求分析
(1)工件進給分度控制。當加工工件進給時,分度軸旋轉分度主要有兩個工藝要求,一是在加工過程中不允許改變分度方向,只能單向旋轉用以消除機械設備的反線誤差;二是分度加工時對溝槽加工的順序有特殊要求,而且刃數為偶數或奇數還有所不同。
偶數以一個8個刃數的銑刀為例,每個溝槽的加工順序是1,5,2,6,3,7,4,8。即第一刃加工完成后,第一刃的起刀點與下一刃起刀點角度差為A,下一刃加工完成后這一刃的起刀點與后一刃的起刀點角度差為B,以此類推直到加工到最后一刃完成,如圖2所示。
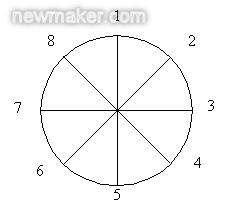
圖2 偶數分度
奇數以一個5個刃數的銑刀為例,每個溝槽的加工順序是1,3,5,2,4,如圖3所示。
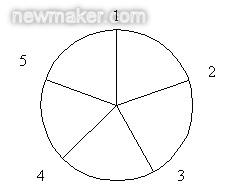
圖3 奇數分度
(2)砂輪漸增量進給控制。工件在加工過程中,溝槽深度是逐漸變淺的一個過程。漸增量是指工件送進100mm時,砂輪提升的高度,如圖4所示。
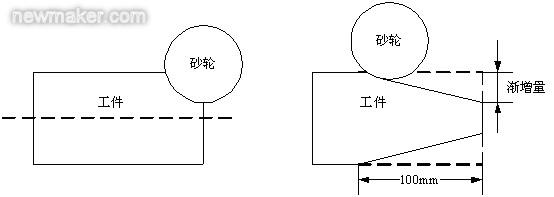
圖4 砂輪漸增量
(3)砂輪修整補償控制。砂輪修整是因加工工藝的需求,而將砂輪的橫截面修整成所需要的形狀,常用砂輪載面形狀,有兩直線一圓弧,一直線兩圓弧,三圓弧,如圖5所示。
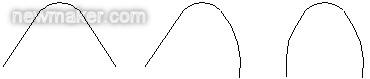
圖5 砂輪載面形狀
2.2 系統功能設計
(1)產品加工功能:送料軸用于控制產品的進給,旋轉軸通過直線插補功能,實現與送料軸的同步旋轉,用以生產出固定螺距和導程角的產品,砂輪進給軸通過電子齒輪功能,實現與進料軸固定比例的提升。
(2)修整砂輪功能:為了提高產品質量,不同的用戶會將砂輪修整成不同的截面形狀,該功能通過Y軸與Z軸的直線或圓弧插補實現該功能。
2.3 系統概念設計
按自動化程度可分為三種機電組合自動化方案。
(1)純液壓控制型:PLC僅提供邏輯控制,產品的制作和砂輪的修整完全靠液壓和機械進行。
(2)普通PLC+液壓控制:PLC控制一個旋轉軸(A軸)實現工件的分度功能,工件的進給和磨削等功能靠液壓及機械完成。
(3)NC(數控加工中心)系統:例如采用三菱的NC E60系統,控制三個軸(X+Y+A)實現產品的制作,主要實現了工件的進給和工件分度功能,砂輪的修整完全靠液壓系統完成,是目前自動化程度較高的解決方案之一。
3 艾默生CT EC20H解決方案
3.1 原理設計
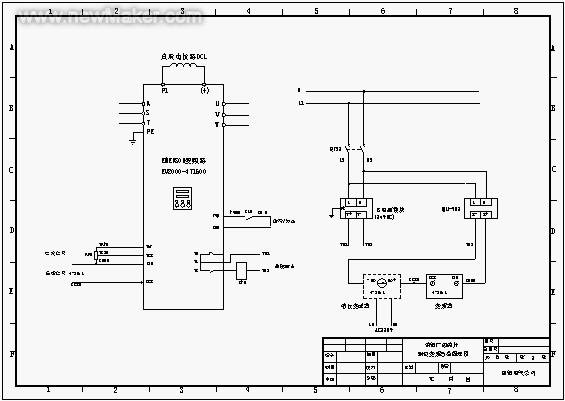
本項目應用艾默生CT EC20H型高速運動控制專用PLC實現X+Y+Z+A軸全軸伺服控制,實現的功能高于數控加工中心。項目增加了砂輪的修整和砂輪磨損補償功能,也是該項目中難度最大的部分。基于艾默生CT EC20H型PLC解決方案的系統原理如圖6所示。

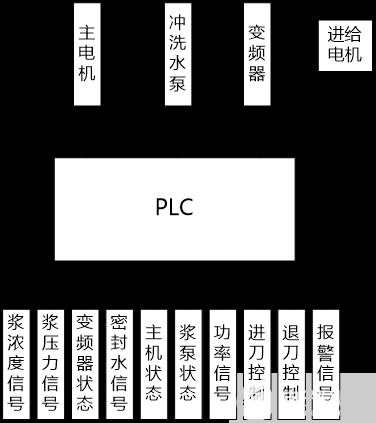
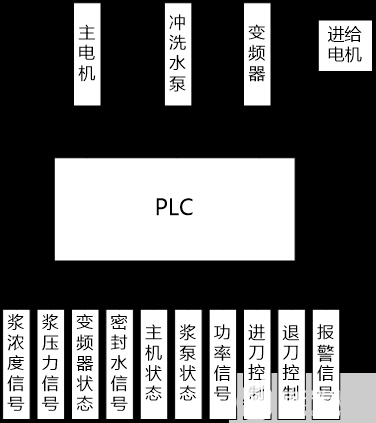
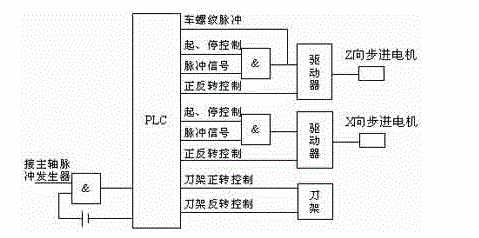
圖6 艾默生CT PLC全軸伺服系統框圖
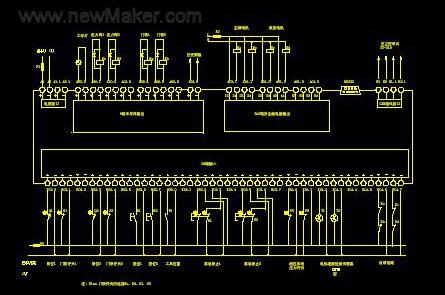
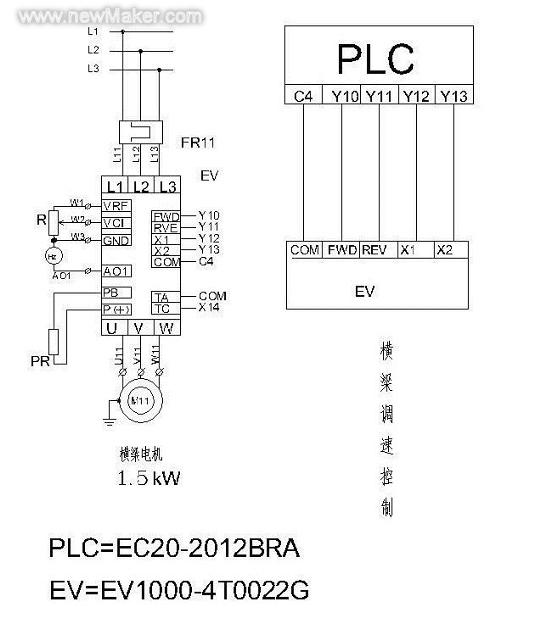
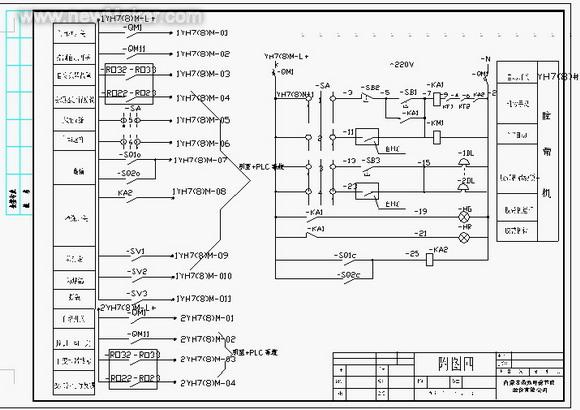
3.2 電控系統設計
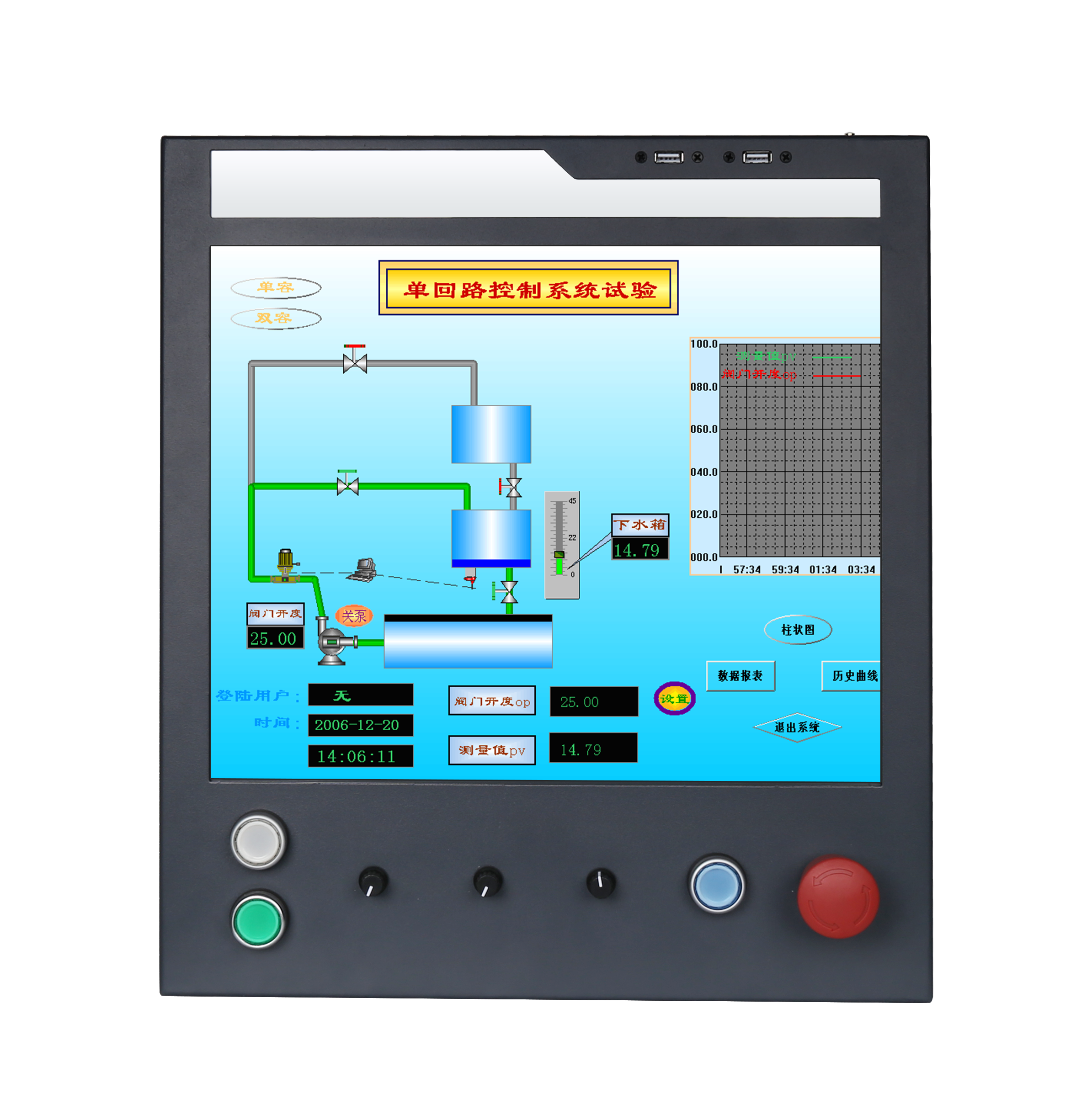
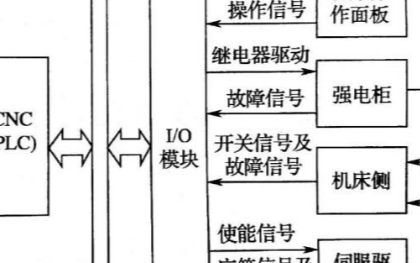
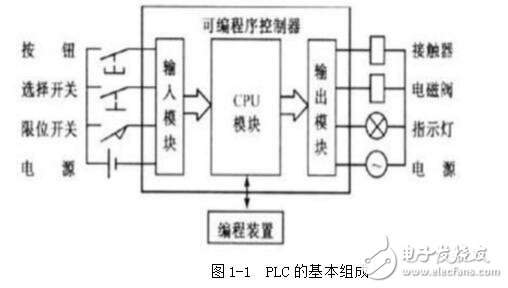
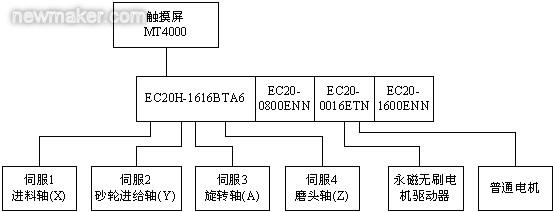
電控系統配置如圖7所示:觸摸屏HMI用于參數設定、設備狀態顯示等功能。伺服用于工作進給軸、旋轉軸、砂輪進給軸、磨頭軸的控制。永磁無刷電機用于控制磨頭的轉動。普通電機用于控制砂輪的轉動。
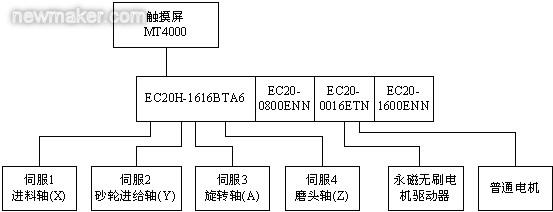
圖7 電控系統
3.3 EC20H伺服控制設計
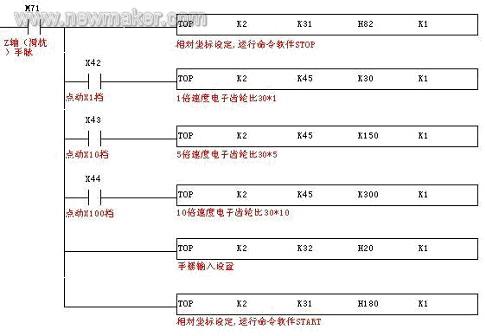
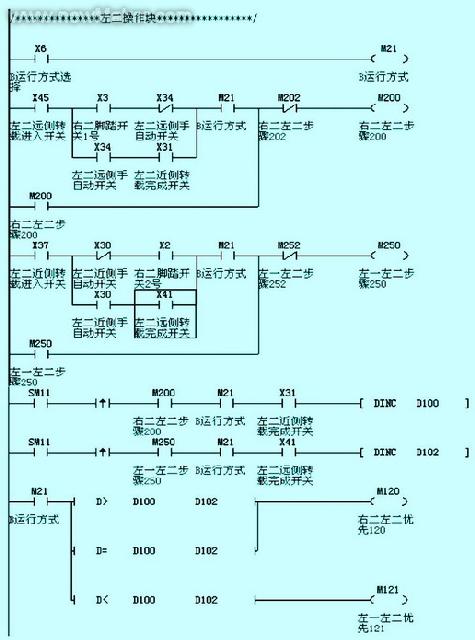
(1)各軸的單獨控制:實現X、Y、Z、A各軸的手動控制功能,可以讓用戶單獨控制各軸的運行。主要是用于對刀,手動調試等功能,使用DRVI指令實現該功能。
(2)插補功能:X軸與A軸:線性插補,用于實現產品的螺距和導程角度;螺距和導程角度是加工產品的兩個重要技術參數,通過X軸與A軸的線性插補實現該功能。X軸以一定的速度前進,A軸通過渦輪渦桿實現工件的旋轉,以一定的角速度旋轉,這樣就可實現工件按所設定的螺距和導程角度進行運行。通過LIN指令實現該功能。
(3)X軸與Y軸:電子齒輪,用于實現磨溝深度的遞減,在磨削過程中,磨溝深度是與進料長度成線性遞減的;通過GEARBOX指令實現該功能。
(4)Y軸與Z軸:線性及圓弧插補,根據用戶的要求,可以實現修整出不同截面形狀的砂輪;首先通過AUTOCAD導入該截面形狀,然后將對應的坐標用D元件替代,以便用戶可以通過觸摸屏進行設定。主要用到LIN和CCW指令。
(5)原點回歸:該設備在初始上電時,要進行圓點回歸,以實現設備開始運行時都會在一個同樣的初始狀態。同時,所有的坐標歸零。使用DSZR指令實現該功能。
4 結束語
目前該項目的主要功能已經實現,和數控加工中心相比,增加了砂輪載形修整功能,顯現出EC20H運行控制型PLC所具有的優異的技術特點。對于需要多軸插補功能的應用場合,基于艾默生CT PLC的機電一體化系統集成產品將表現出強大的技術優勢。


















 工商網監
工商網監
評論