 電子發(fā)燒友App
電子發(fā)燒友App


艾默生變頻器和可編程控制器在漿紗機(jī)上的應(yīng)用
艾默生張力變頻器和可編程控制器在漿紗機(jī)上做恒張力收卷控制,減少設(shè)備磨損。保證設(shè)備收卷的穩(wěn)定性,方便性。
一、 系統(tǒng)概述
艾默生PLC和變頻器在漿紗機(jī)上的應(yīng)用,此電氣系統(tǒng)采用PLC集中管理,分散控制,系統(tǒng)集中化,簡約化,易控性強(qiáng),更好的降低故障率。
方案配置如下:

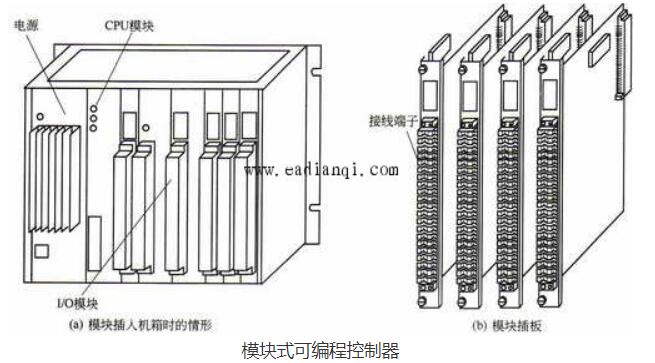
PLC系統(tǒng)由艾默生EC202416BAR主模塊,16點(diǎn)的數(shù)字量輸入模塊和4路模擬量輸出模塊組成。
操作界面采用工業(yè)級液晶觸摸屏,可動態(tài)修改控制參數(shù),方便顯示當(dāng)前速度,當(dāng)前匹長、 匹數(shù)及系統(tǒng)的動態(tài)運(yùn)行狀態(tài)。
邊軸電機(jī)變頻器采用高性能通用型的EV2000系列,織軸收卷TD3300 22KW張力變頻器。此變頻器是張力專用變頻器,內(nèi)置張力控制功能。采用獨(dú)立變頻模式,結(jié)構(gòu)簡單,維護(hù)方便,穩(wěn)定度高,保證收卷的張力及線速度,在小卷到大卷的變化過程中穩(wěn)定可靠。在加減速中的自動補(bǔ)償控制,使加減速中張力更穩(wěn),更有上卷防斷紗程序,使上卷起機(jī)時(shí)便于操作。
本系統(tǒng)的優(yōu)點(diǎn):
·張力設(shè)定在人機(jī)上設(shè)定,人性化的操作;
·使用先進(jìn)的控制算法:卷徑的遞歸運(yùn)算;空心卷徑激活時(shí)張力的線性遞加;張力錐度計(jì)算公式的應(yīng)用;轉(zhuǎn)矩補(bǔ)償?shù)膭討B(tài)調(diào)整等等;
·卷徑的實(shí)時(shí)計(jì)算,精確度非常高,保證收卷電機(jī)輸出轉(zhuǎn)矩的平滑性能好。并且在計(jì)算卷徑時(shí)加入了卷徑的遞歸運(yùn)算,在操作失誤的時(shí)候,能自己糾正卷徑到正確的數(shù)值;
·因?yàn)槭站硌b置的轉(zhuǎn)動慣量是很大的,卷徑由小變大時(shí)。如果操作人員進(jìn)行加速、減速、停車、再激活時(shí)很容易造成爆紗和松紗的現(xiàn)象,將直接導(dǎo)致紗的質(zhì)量。而進(jìn)行了變頻收卷的改造后,在上述各種情況下,收卷都很穩(wěn)定,張力始終恒定。而且經(jīng)過PLC的處理,在特定的動態(tài)過程,加入一些動態(tài)的調(diào)整措施,使得收卷的性能更好;
·在傳統(tǒng)機(jī)械傳動收卷的基礎(chǔ)上改造成變頻收卷,非常簡便而且造價(jià)低,基本上不需對原有機(jī)械進(jìn)行改造。改造周期短,基本上兩三天就能安裝調(diào)試完成;
·克服了機(jī)械收卷對機(jī)械磨損的弊端,延長機(jī)械的使用壽命。方便維護(hù)設(shè)備。
·機(jī)臺上的所有操作部分全部采用36V以下的安全電,以保證操作中的使用安全。
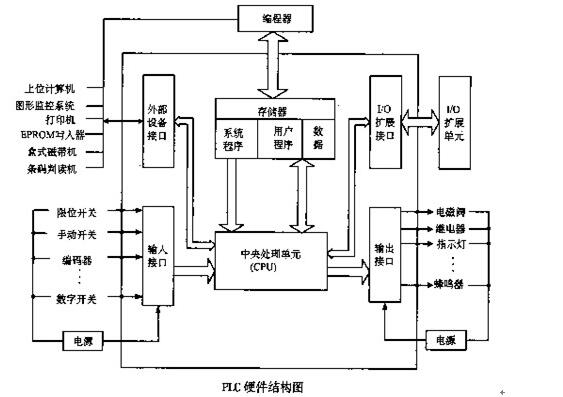
二、 系統(tǒng)框圖

三、 張力控制原理
所謂的張力控制,通俗點(diǎn)講就是要能控制電機(jī)輸出多大的力,即輸出多少牛頓。反應(yīng)到電機(jī)軸即能控制電機(jī)的輸出轉(zhuǎn)矩。真正的張力控制不同于靠前后兩個(gè)動力點(diǎn)的速度差形成張力的系統(tǒng),靠速度差來調(diào)節(jié)張力的實(shí)質(zhì)是對張力的PID控制,要加張力傳感器。而且在大小卷啟動、停止、加速、減速、停車時(shí)的調(diào)節(jié)不可能做到像真正的張力控制的效果,張力不是很穩(wěn)定。肯定會影響產(chǎn)品的質(zhì)量。
變頻收卷的實(shí)質(zhì)是要完成張力控制,即能控制電機(jī)的運(yùn)行電流,因?yàn)槿喈惒诫姍C(jī)的輸出轉(zhuǎn)矩T=CmφmIa,與電流成正比。并且當(dāng)負(fù)載有突變時(shí)能夠保證電機(jī)的機(jī)械特性曲線比較硬。所以必須用矢量變頻器,而且必須要加編碼器閉環(huán)控制。用變頻器做恒張力控制的實(shí)質(zhì)是死循環(huán)矢量控制,即加編碼器反饋。收卷的卷經(jīng)是由小到大變化的,為了保證恒張力,所以要求電機(jī)的輸出轉(zhuǎn)距要由小到大變化。同時(shí)在不同的操作過程,要進(jìn)行相應(yīng)的轉(zhuǎn)距補(bǔ)償。即小卷啟動的瞬間,加速,減速,停車,大卷啟動時(shí),要在不同卷經(jīng)時(shí)進(jìn)行不同的轉(zhuǎn)距補(bǔ)償,這樣就能使得收卷的整個(gè)過程很穩(wěn)定,避免小卷時(shí)張力過大;大卷啟動時(shí)松紗的現(xiàn)象。
·卷徑的計(jì)算原理
根據(jù)V1=V2來計(jì)算收卷的卷徑。因?yàn)閂1=ω1×R1, V2=ω2×Rx。因?yàn)樵谙嗤臅r(shí)間內(nèi)由測長輥?zhàn)哌^的紗的長度與收卷收到的紗的長度是相等的。即L1/Δt=L2/Δt,Δn1×C1=Δn2×C2/i
(Δn1---單位時(shí)間內(nèi)牽引電機(jī)運(yùn)行的圈數(shù)、Δn2---單位時(shí)間內(nèi)收卷電機(jī)運(yùn)行的圈數(shù)、C1---測長輥的周長、C2---收卷盤頭的周長、i---減速比)
Δn1×π×D1=Δn2×π×D2/i
D2=Δn1×D1×i/Δn2,因?yàn)棣2=ΔP2/P2
(ΔP2---收卷編碼器產(chǎn)生的脈沖數(shù)、P2---收卷編碼器的圈數(shù))。Δn1=ΔP1/P1取Δn1=1,即測長輥轉(zhuǎn)一圈,由編碼器接到PLC。那么D2=D1×i×P2/ΔP2,這樣收卷盤頭的卷徑就得到了
·收卷的動態(tài)過程分析
要能保證收卷過程的平穩(wěn)性,不論是大卷、小卷、加速、減速、激活、停車都能保證張力的恒定。需要進(jìn)行轉(zhuǎn)矩的補(bǔ)償。整個(gè)系統(tǒng)要激活起來,首先要克服靜摩擦力所產(chǎn)生的轉(zhuǎn)矩,簡稱靜摩擦轉(zhuǎn)矩,靜摩擦轉(zhuǎn)矩只在激活的瞬間起作用;正常運(yùn)行時(shí)要克服滑動摩擦力產(chǎn)生地滑動摩擦轉(zhuǎn)矩,滑動摩擦轉(zhuǎn)矩在運(yùn)行當(dāng)中一直都存在,并且在低速、高速時(shí)的大小是不一樣的。需要進(jìn)行不同大小的補(bǔ)償,系統(tǒng)在加速、減速、停車時(shí)為克服系統(tǒng)的慣量,也要進(jìn)行相應(yīng)的轉(zhuǎn)矩補(bǔ)償,補(bǔ)償?shù)牧颗c運(yùn)行的速度也有相應(yīng)的比例關(guān)系。在不同車速的時(shí)候,補(bǔ)償?shù)南禂?shù)是不同的。即加速轉(zhuǎn)矩、減速轉(zhuǎn)矩、停車轉(zhuǎn)矩、激活轉(zhuǎn)矩;克服了這些因素,還要克服負(fù)載轉(zhuǎn)矩,通過計(jì)算出的實(shí)時(shí)卷徑除以2再乘以設(shè)定的張力大小,經(jīng)過減速比折算到電機(jī)軸。這樣就分析出了收卷整個(gè)過程的轉(zhuǎn)矩補(bǔ)償?shù)倪^程。
總結(jié):電機(jī)的輸出轉(zhuǎn)矩=靜摩擦轉(zhuǎn)矩(激活瞬間)+滑動摩擦轉(zhuǎn)矩+負(fù)載轉(zhuǎn)矩。
·轉(zhuǎn)矩的補(bǔ)償標(biāo)準(zhǔn)
1) 靜摩擦轉(zhuǎn)矩的補(bǔ)償
因?yàn)殪o摩擦轉(zhuǎn)矩只在激活的瞬間存在,在系統(tǒng)激活后就消失了。因此靜摩擦轉(zhuǎn)矩的補(bǔ)償是以計(jì)算后電機(jī)輸出轉(zhuǎn)矩乘以一定的百分比進(jìn)行補(bǔ)償。
2) 滑動摩擦轉(zhuǎn)矩的補(bǔ)償
滑動摩擦轉(zhuǎn)矩的補(bǔ)償在系統(tǒng)運(yùn)行的整個(gè)過程中都是起作用的。補(bǔ)償?shù)拇笮∫允站黼姍C(jī)的額定轉(zhuǎn)矩為標(biāo)準(zhǔn)。補(bǔ)償量的大小與運(yùn)行的速度有關(guān)系。所以在程序中處理時(shí),要分段進(jìn)行補(bǔ)償。
3) 加減速、停車轉(zhuǎn)矩的補(bǔ)償
補(bǔ)償硬一收卷電機(jī)的額定轉(zhuǎn)矩為標(biāo)準(zhǔn),相應(yīng)的補(bǔ)償系數(shù)應(yīng)該比較穩(wěn)定,變化不大。
·相關(guān)的計(jì)算公式


四、 調(diào)試過程
(1)先對電機(jī)進(jìn)行自整定,將電機(jī)的定子電感、定子電阻等參數(shù)讀入變頻器。
(2)將編碼器的信號接至變頻器,并在變頻器上設(shè)定編碼器的圈數(shù)。然后用面板給定頻率和啟停控制,觀察顯示的運(yùn)行頻率是否在設(shè)定頻率的左右波動。因?yàn)檫\(yùn)用閉環(huán)矢量控制時(shí),運(yùn)行頻率總是接近設(shè)定頻率,所以運(yùn)行頻率是在設(shè)定頻率的附近波動的。
(3)在程序中設(shè)定空芯卷徑和最大卷徑的數(shù)值。通過前面卷徑計(jì)算的公式算出電機(jī)尾部所加編碼器產(chǎn)生的最大脈沖量(P2)和最低脈沖量(P2)。通過算出的最大脈沖量對收卷電機(jī)的速度進(jìn)行限定,因?yàn)樽冾l器用作張力控制時(shí),如果不對最高速進(jìn)行限定,一旦出現(xiàn)斷紗等情況,收卷電機(jī)會飛車的。最低脈沖量是為了避免收卷變頻器運(yùn)行在2Hz以下,因?yàn)樽冾l器在2Hz以下運(yùn)行時(shí),電機(jī)的轉(zhuǎn)矩特性很差,會出現(xiàn)抖動的現(xiàn)象。
(4)通過前面分析的整個(gè)收卷的動態(tài)過程,在不同卷徑和不同運(yùn)行速度的各個(gè)階段,進(jìn)行一定的轉(zhuǎn)矩補(bǔ)償。補(bǔ)償?shù)拇笮。噪姍C(jī)額定轉(zhuǎn)距的百分比來設(shè)定。
五、 參數(shù)簡表
附表1:TD3300功能參數(shù)簡表 


結(jié)束語:技術(shù)更新越來越快,我們必須提高產(chǎn)品性能,使我們的產(chǎn)品能夠適應(yīng)我們的工藝要求












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論