 電子發燒友App
電子發燒友App


艾默生EC20系列PLC在空壓機聯控中的應用
確保合格的供氣品質,滿足穩定的氣源壓力,自動調節供氣流量等是空壓站自動控制的基本任務。空壓機設備自帶的單片機控制器已經能很好的控制單臺空壓機,但不具備對空壓系統的整體調控能力。在空壓系統中,相對單臺空壓機的調整,系統的整體聯控具有更重要的意義。
聯控系統最主要的功能是可以實現空壓機機組(包括每臺空壓機的后處理設備)的聯鎖控制,能根據總管壓力和空壓機的運行狀態智能地加卸載對應的空壓機等以保證管網的供氣穩定。
聯控有兩種模式:時間順序模式、固定順序模式。兩者的聯控原理是一致的。只是時間順序模式中各臺空壓機每隔一個輪換時間就按順序時間判斷一次,具體工作模式參考《順序控制與通訊協議手冊》,而固定模式的啟動順序是保持不變的。
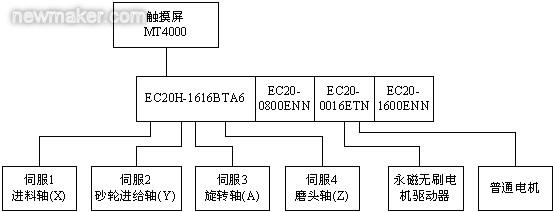
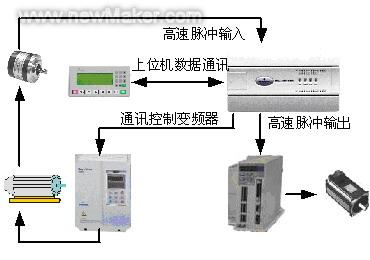
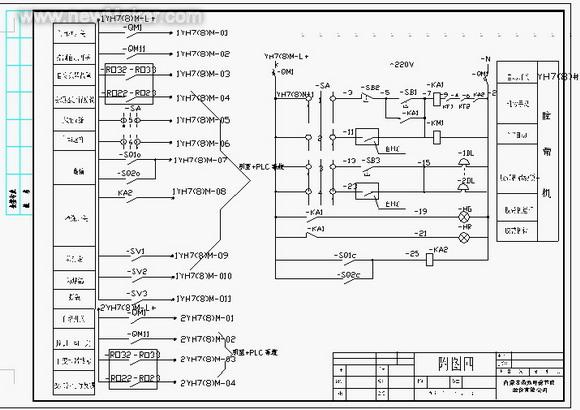
空壓機聯控系統圖:
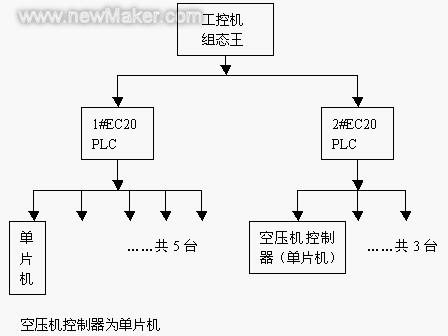
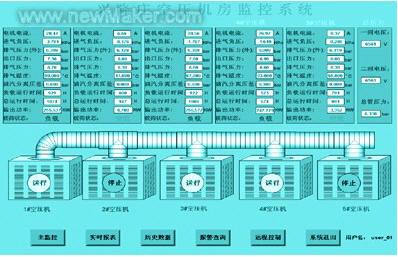
工控機選用研華工控機,監控軟件為組態王。對現場各類數據及系統設定參數進行實時顯示,為系統報警和遠程數據監控提供一個數據信息交互平臺;對機組各類運行控制要求進行命令觸發,為介入系統實時改變系統運行狀態提供一個控制命令操作平臺。
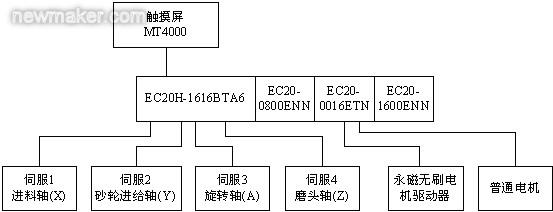
1#EC20PLC和2#EC20 PLC分別為兩個空壓機站的控制中心完成組態與單片機的數據交換和存儲以及工控機各類控制信號處理。主要的自動控制任務都由PLC自行完成,組態只能選擇具體的機組運行方式,以及特定狀態下對單臺機組的單一運行方式改變。各臺空壓機的信號通過RS485總線連接至PLC;
由于空壓機自帶的單片機控制器提供了RS485通訊接口,所有的數據采集和控制功能都通過通訊接口來實現,在原有的控制系統基礎上,增加2臺PLC,改進和增加控制軟件即可實現空壓系統的整體控制與連網監控。
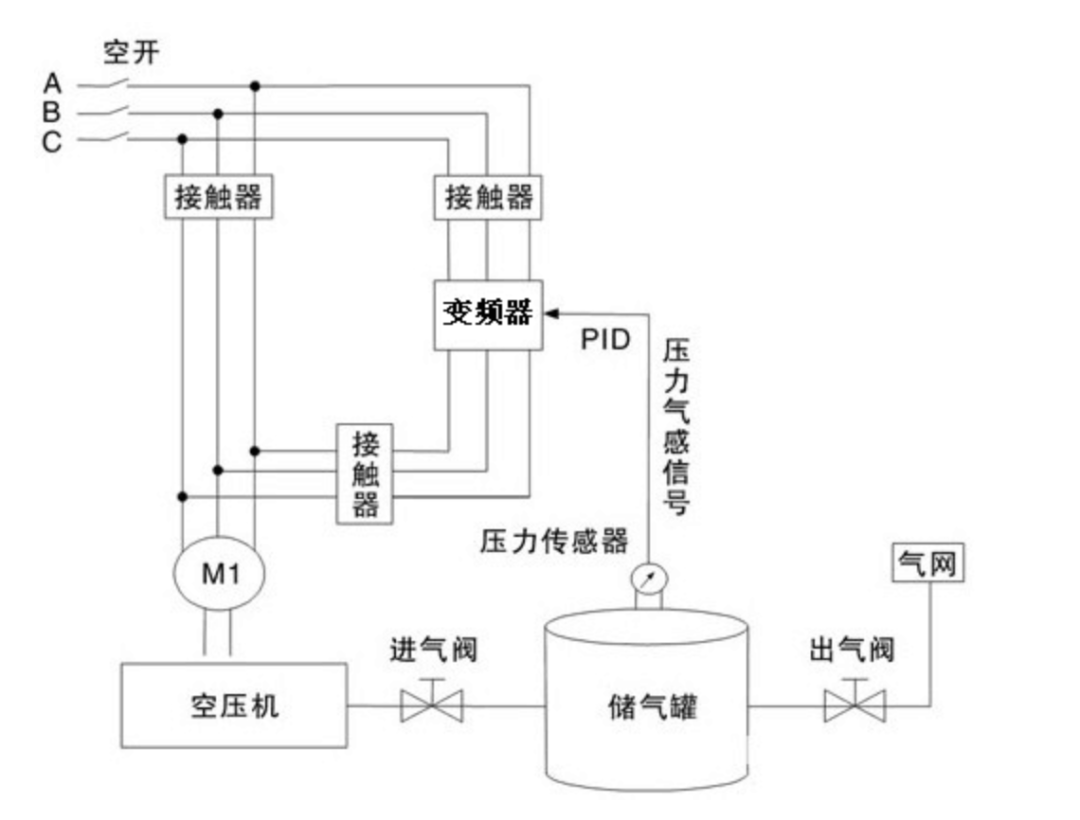
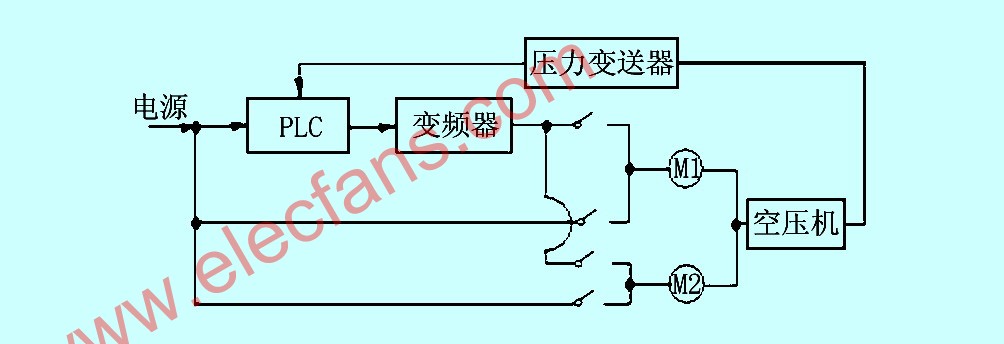
二 設備工藝
PLC控制部分是系統的核心部分:而供氣壓力是系統各種運行狀態改變與保持的唯一指標。簡言之:壓力小于供氣壓力要求下限就要更多的供氣機組運行以增加供氣量,壓力大于供氣壓力要求上限就要把當前運行供氣機組減少以減少供氣量。而處于上下限之間的壓力值時就保持當前機組的運行狀態不變。
就單臺空壓機而言,其可以自行進行供氣量大小的調節。當一臺機器運行時,它的供氣量是一個從零到最大氣量之間浮動的值而不是一個額定輸出的定值。所以在整個供氣方案中我們用改變運行機組臺數的方法來改變對管網的供氣。每臺機組有加載、滿載、卸載、和停機四種狀態。加載到滿載之間,供氣量的值是0到最大值的過程;卸載是停止供氣的狀態但機組仍在運行;而停機是機組不供氣也不運行。
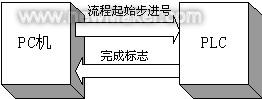
一個正常的供氣流程如下:

把確定在網機組數與機組中間運行狀態結合起來就構成了控制思路的最基本環節。即通過壓力報警確定機組數目需要增加或減少,如果已經在中間狀態了加載、滿載、卸載任意一個,就按增氣或減氣的方向移動中間狀態直到運行到邊界狀態;當到達邊界狀態時按增氣或減氣的方向移動到下一臺。當然如要穩定下來必須是在中間狀態,邊界狀態是不能穩定的。
三 控制程序
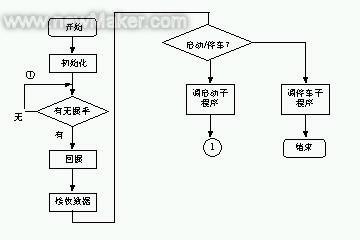
空壓機聯控系統主要是PLC與單片機交換數據并確定每臺空壓機的運行方式。
程序的編寫主體上分兩大部分:讀數據部分和寫數據部分,流程圖如下

(一)讀取單片機的信息
根據空壓機控制器內單片機的相關Modbus通訊協議,編寫通訊“讀信息指令”的數據幀,以PLC中的Modbus通訊指令發給控制器內的單片機,單片機響應后返回相應的數據幀。通過返回幀的相應字符串判斷與控制器相連的空壓機的各種故障狀態工作狀態以及空壓機的各種壓力溫度數據,并將返回的各類數據存放在相應的數據寄存器。
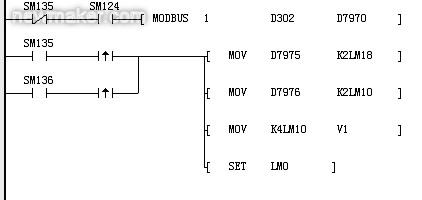
在該子程序的開始部分,執行站地址加1的操作,即每進入讀數據子程序就會讀取上次讀過的程序的下一臺;靠站地址的不斷變化我們實現了讀取數據通訊的輪詢操作。

Modbus指令只需要一次上升沿作為發送使能,第一周期sm124沒有開合的狀態變化即沒有上升沿,所以第一周期過后靠sm1的常閉上升沿作為Modbus指令的發送使能。每次發送的同時靠發送使能的上升沿把sm135、sm136清位。sm135、sm136與通訊程序沒有任何直接關系,只是貫穿程序所必須的標志位。
(二)向單片機中寫入相關信息
整個寫信息部分分下面三塊:
a.邏輯判斷運算部分
供氣壓力是系統各種運行狀態改變與保持的唯一指標。
壓力小于供氣壓力要求下限就要更多的供氣機組運行以增加供氣量,壓力大于供氣壓力要求上限就要把當前運行供氣機組減少以減少供氣量。而處于上下限之間的壓力值時就保持當前機組的運行狀態不變。
按照工藝控制邏輯來構成邏輯判斷運算部分,并且機組按照先開后停的原則順序啟動(1、2、3←→3、2、1)。
為保證數據的正確性,需要判斷讀信息子程序的站地址與寫信息程序將執行控制操作的站地址是否一致,然后需要判斷相應的故障信息寄存器是否為0,為0證明無故障或輕故障,不為0則不向該站發任何控制指令并馬上對下一臺操作。
由于我們對故障進行了分類,所以可以根據不同類別的故障進行不同的控制操作:
1類故障不讀不寫(相應的故障信息寄存器為1)
2類故障只讀不寫(相應的故障信息寄存器為2)
沒有故障紀錄(相應的故障信息寄存器默認值為0)
對故障分類的控制策略是很有價值的,在以后的控制過程根據故障類別或者可以作為運行態的類別,進行有所區分的控制。不管是通訊控制方式還是數字I/O控制方式,相信都可以在某種程度上采用這類簡便有效的方法。
b.數據幀結構部分
在這個部分里主要是發送數據幀的整體架構。
c.Modbus通訊指令發送部分
指令發送部分和讀數據子程序類似,就不再多介紹了。
客戶還要求機組順序可以任意打亂,但是順序號關聯著整個控制流程又不能搭亂所以只能把機器號放到依照固定順序排列的機器號寄存器里面去,打亂這些機器號寄存器里面存放著的機器號的順序來實現機組順序的任意性。主程序中加入了判斷機組信息的部分,還是判斷故障信息寄存器內的值,先根據這些值判斷出有多少臺機組在網,然后根據故障信息寄存器內的值判斷哪臺機組退網,退網的機組編號放在網內最后一臺機組機器號寄存器的后面機器號寄存器里面。進網的時候只需改寫故障信息寄存器,相應的在網機組臺數可自行判斷出來。這樣進網退網的順序就變成了先退先進。
四 總結
空壓機系統聯控可以根據實際需要自動開機或加載空壓機以保持系統壓力。有效保持了系統內空氣壓力穩定。調整了整體的負載平衡,減少了排氣放空,節約了更多的能源,提高了監控系統的全面有效性,真正實現了無人自動化操作




















 工商網監
工商網監
評論