 電子發(fā)燒友App
電子發(fā)燒友App


船舶自動化領(lǐng)域的一個重要組成部分是主機遙控系統(tǒng)。目前主機遙控系統(tǒng)技術(shù)方案多種多樣,本文采用PLC工業(yè)控制網(wǎng)絡(luò)來實現(xiàn)主機遙控系統(tǒng)的功能,具有經(jīng)濟性能好、硬件電路結(jié)構(gòu)簡單、工作安全可靠的特點。
在多PLC控制網(wǎng)絡(luò)實現(xiàn)主機遙控系統(tǒng)設(shè)計的基礎(chǔ)上,研討主要設(shè)計整個PLC網(wǎng)絡(luò)的總體結(jié)構(gòu)和通訊方案,并通過通訊網(wǎng)絡(luò)實現(xiàn)對主機的起停部分的自動控制及安保系統(tǒng)設(shè)計。
2 主機遙控PLC網(wǎng)絡(luò)控制總體結(jié)構(gòu)設(shè)計及通訊方式的實現(xiàn)
2.1 主機遙控PLC網(wǎng)絡(luò)控制總體結(jié)構(gòu)設(shè)計
PLC控制網(wǎng)絡(luò)用于主機遙控系統(tǒng)的控制,包括兩臺S7-200PLC。其中一臺用于主機起停和轉(zhuǎn)速調(diào)節(jié)控制,安裝在機控室;另一臺用于完成電子調(diào)速器的任務(wù),安裝在機艙。另設(shè)計算機作為監(jiān)視平臺,用來監(jiān)視整個系統(tǒng)的重要信號。
整個網(wǎng)絡(luò)的主要設(shè)備為:兩臺S7-200PLC、一臺微型機、網(wǎng)絡(luò)連接器、PC/PPI電纜、RS-485電纜。
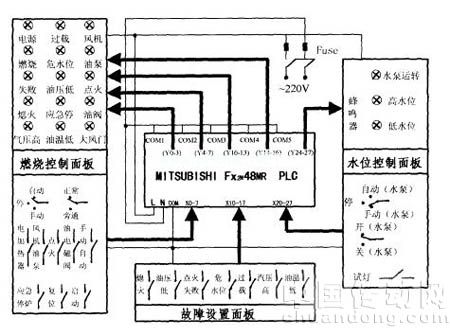
根據(jù)總體通訊設(shè)計思路,我們的總體結(jié)構(gòu)圖設(shè)計如圖1。
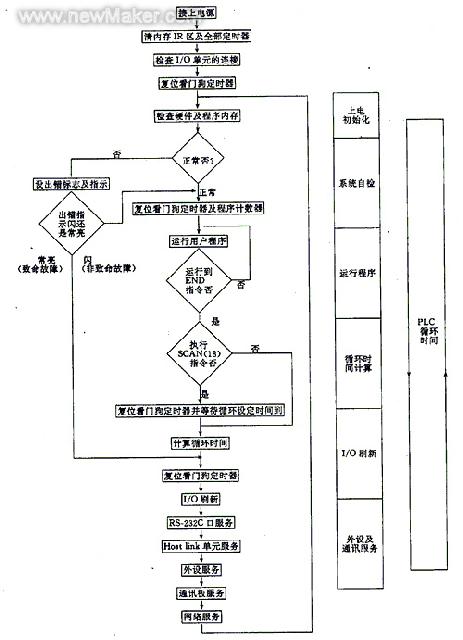
在S7-200網(wǎng)絡(luò)通訊中,可以實現(xiàn)兩種通訊協(xié)議進行通訊而不互相干擾。但前提是兩種協(xié)議的波特率必須相同,由于只有一個通訊口,波特率只支持9600波特,因此在多協(xié)議通訊時,波特率設(shè)置為9600波特。對于多協(xié)議的組合方式,作者采用了總線分時復用法,在總線分時控制中,作者通過幾個定時器組成矩形波,從而形成高低不同時段分別進行PPI協(xié)議通訊和自由口通訊。主程序流程圖見圖2。PPI通信程序流程見圖3。自由口通信程序的流程見圖4。
3 主機遙控系統(tǒng)的設(shè)計
3.1 起停部分的設(shè)計
作者在設(shè)計過程中選擇的對象是最常見的B&M低速機,起停控制主要包括5個部分:起動控制,慢轉(zhuǎn)控制,停車控制,重復起動控制。以正車起動為例,系統(tǒng)須針對兩種情況:停車情況下的起動和正常反向起動,都能確保正車起動電磁閥的通斷,同時還須判斷重復起動的狀態(tài),正車起動的程序流程如圖5所示。
3.2 轉(zhuǎn)速控制部分的設(shè)計
本設(shè)計是用模擬量輸入模塊EM235來讀取車鐘指令和轉(zhuǎn)速反饋。PLC主站首先讀入模擬量,通過三次移位,可以得到12位的數(shù)字信號,然后通過定時中斷程序?qū)斎肓窟M行數(shù)字濾波,濾波后的數(shù)據(jù)將與由外電路所確定的正常信號電壓范圍比較,可判斷車令電位器的三個接線端有無斷線故障,在確保信號的正常之后,再經(jīng)過各種限制處理,限制環(huán)節(jié)主要包括臨界轉(zhuǎn)速限制,加速度限制和負荷程序限制,限制處理后的結(jié)果最后通過PPI通信協(xié)議發(fā)送給從站PLC電子調(diào)速器進而控制主機的轉(zhuǎn)速。轉(zhuǎn)速限制處理程序流程圖6所示。
4 結(jié)束語
本文結(jié)合中小型船舶維修改造過程中對主機遙控系統(tǒng)的要求,提出一種硬件電路相對簡單且易于實現(xiàn)、線路少、編程容易且功能較全面的主機遙控系統(tǒng)的設(shè)計及實施方案。系統(tǒng)采用兩臺S7-200PLC與一臺計算機構(gòu)成主機遙控系統(tǒng)的基本框架,利用串行通信總線可實現(xiàn)各個控制器及計算機之間的信息傳輸,該方案目前已經(jīng)在實驗室環(huán)境下完成了系統(tǒng)的設(shè)計以及調(diào)試工作。
在多PLC控制網(wǎng)絡(luò)實現(xiàn)主機遙控系統(tǒng)設(shè)計的基礎(chǔ)上,研討主要設(shè)計整個PLC網(wǎng)絡(luò)的總體結(jié)構(gòu)和通訊方案,并通過通訊網(wǎng)絡(luò)實現(xiàn)對主機的起停部分的自動控制及安保系統(tǒng)設(shè)計。
2 主機遙控PLC網(wǎng)絡(luò)控制總體結(jié)構(gòu)設(shè)計及通訊方式的實現(xiàn)
2.1 主機遙控PLC網(wǎng)絡(luò)控制總體結(jié)構(gòu)設(shè)計
PLC控制網(wǎng)絡(luò)用于主機遙控系統(tǒng)的控制,包括兩臺S7-200PLC。其中一臺用于主機起停和轉(zhuǎn)速調(diào)節(jié)控制,安裝在機控室;另一臺用于完成電子調(diào)速器的任務(wù),安裝在機艙。另設(shè)計算機作為監(jiān)視平臺,用來監(jiān)視整個系統(tǒng)的重要信號。
整個網(wǎng)絡(luò)的主要設(shè)備為:兩臺S7-200PLC、一臺微型機、網(wǎng)絡(luò)連接器、PC/PPI電纜、RS-485電纜。
根據(jù)總體通訊設(shè)計思路,我們的總體結(jié)構(gòu)圖設(shè)計如圖1。

圖1 總體結(jié)構(gòu)圖
附表 通訊口引腳分配 
在S7-200網(wǎng)絡(luò)通訊中,可以實現(xiàn)兩種通訊協(xié)議進行通訊而不互相干擾。但前提是兩種協(xié)議的波特率必須相同,由于只有一個通訊口,波特率只支持9600波特,因此在多協(xié)議通訊時,波特率設(shè)置為9600波特。對于多協(xié)議的組合方式,作者采用了總線分時復用法,在總線分時控制中,作者通過幾個定時器組成矩形波,從而形成高低不同時段分別進行PPI協(xié)議通訊和自由口通訊。主程序流程圖見圖2。PPI通信程序流程見圖3。自由口通信程序的流程見圖4。

圖2 主程序流程圖見
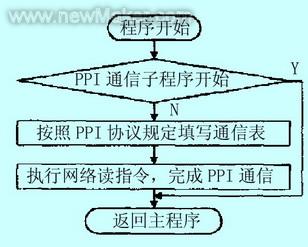
圖3 PPI通信程序流程
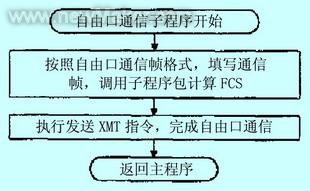
圖4 自由口通信程序的流程
3 主機遙控系統(tǒng)的設(shè)計
3.1 起停部分的設(shè)計
作者在設(shè)計過程中選擇的對象是最常見的B&M低速機,起停控制主要包括5個部分:起動控制,慢轉(zhuǎn)控制,停車控制,重復起動控制。以正車起動為例,系統(tǒng)須針對兩種情況:停車情況下的起動和正常反向起動,都能確保正車起動電磁閥的通斷,同時還須判斷重復起動的狀態(tài),正車起動的程序流程如圖5所示。
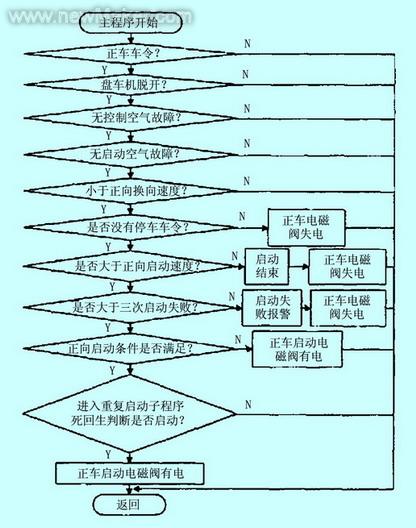
圖5 正車起動的程序流程
3.2 轉(zhuǎn)速控制部分的設(shè)計
本設(shè)計是用模擬量輸入模塊EM235來讀取車鐘指令和轉(zhuǎn)速反饋。PLC主站首先讀入模擬量,通過三次移位,可以得到12位的數(shù)字信號,然后通過定時中斷程序?qū)斎肓窟M行數(shù)字濾波,濾波后的數(shù)據(jù)將與由外電路所確定的正常信號電壓范圍比較,可判斷車令電位器的三個接線端有無斷線故障,在確保信號的正常之后,再經(jīng)過各種限制處理,限制環(huán)節(jié)主要包括臨界轉(zhuǎn)速限制,加速度限制和負荷程序限制,限制處理后的結(jié)果最后通過PPI通信協(xié)議發(fā)送給從站PLC電子調(diào)速器進而控制主機的轉(zhuǎn)速。轉(zhuǎn)速限制處理程序流程圖6所示。
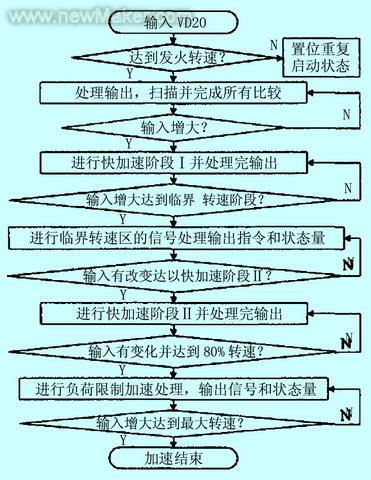
圖6 轉(zhuǎn)速限制處理程序流程
4 結(jié)束語
本文結(jié)合中小型船舶維修改造過程中對主機遙控系統(tǒng)的要求,提出一種硬件電路相對簡單且易于實現(xiàn)、線路少、編程容易且功能較全面的主機遙控系統(tǒng)的設(shè)計及實施方案。系統(tǒng)采用兩臺S7-200PLC與一臺計算機構(gòu)成主機遙控系統(tǒng)的基本框架,利用串行通信總線可實現(xiàn)各個控制器及計算機之間的信息傳輸,該方案目前已經(jīng)在實驗室環(huán)境下完成了系統(tǒng)的設(shè)計以及調(diào)試工作。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論