ABB機器人I/O板信號設(shè)定(dsqc651為例)!
2023-08-12 14:30:33 1243
1243 
剛剛接觸ABB機器人的同學(xué),可能對程序內(nèi)的任務(wù)、模塊、例行程序等概念不是特別了解,這里簡單總結(jié)了一下ABB機器人程序結(jié)構(gòu)。
2023-05-25 16:15:421802 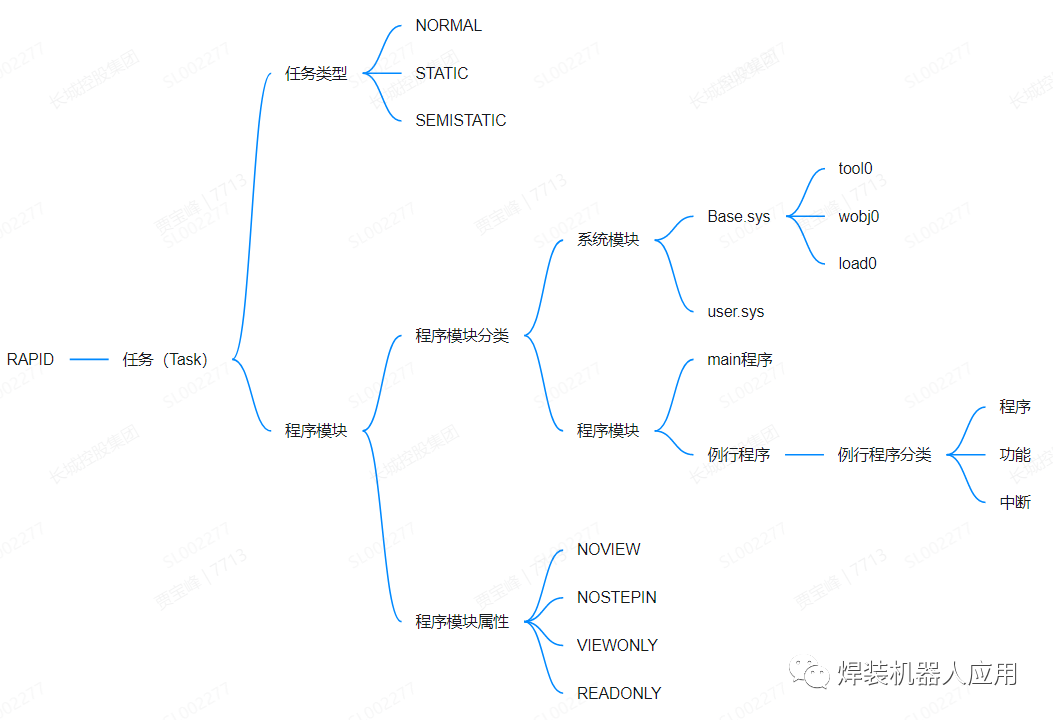
定期對ABB機器人的數(shù)據(jù)進行備份,是保證ABB機器人正常工作的良好習(xí)慣。ABB機器人數(shù)據(jù)備份的對象是所有正在系統(tǒng)內(nèi)存運行的RAPID程序和系統(tǒng)參數(shù)。當機器人系統(tǒng)出現(xiàn)錯亂或者重新安裝新系統(tǒng)以后,可以通過備份快速地把機器人恢復(fù)到備份時的狀態(tài)。
2022-11-12 16:26:144881 電子發(fā)燒友網(wǎng)站提供《用于MeArm機器人記錄坐標的舊項目操縱桿控制器.zip》資料免費下載
2022-11-07 14:57:12 2
2 直角坐標機器人是指能夠?qū)崿F(xiàn)自動控制的、可重復(fù)編程的、多自由度的、運動自由度建成空間直角關(guān)系的、多用途的操作機。又稱大型的直角坐標機器人,也稱桁架機器人或龍門式機器人,其工作的行為方式主要是通過
2022-11-02 14:59:561339 
直角坐標機器人直角坐標機器人是指能夠?qū)崿F(xiàn)自動控制的、可重復(fù)編程的、多自由度的、運動自由度建成空間直角關(guān)系的、多用途的操作機。又稱大型的直角坐標機器人,也稱桁架機器人或龍門式機器人,其工作的行為方式
2022-10-27 11:19:41414 
坐標機器人碼垛機
2022-09-30 11:34:18490 江智黨建機器人是經(jīng)過多年的市場沉淀 ;現(xiàn)已可以提供系統(tǒng) 全方位的黨建機器人服務(wù)
2022-06-21 07:59:59
青島ABB機器人發(fā)生電源故障維修工具:檢查ABB機器人DSQC604故障指示燈LED已經(jīng)亮起時,則表示ABB機器人電源出現(xiàn)了故障,對其檢測維修時需要的的工具有歐姆計、伏特計及阻抗型負載。首先檢查
2022-01-11 13:32:0612 ABB機器人操作培訓(xùn)手冊.pdf
2021-12-30 17:42:3710 ABB機器人CP中級應(yīng)用培訓(xùn)
2021-11-25 16:29:5710 我是新人,求幫助啊,明天需要提交輪式機器人應(yīng)用的報告,求大神給點建議,可用輪式機器人應(yīng)用于那些方面,要求實際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
ABB-IRB140工業(yè)機器人技術(shù)樣本。
2021-05-17 10:14:5131 ABB機器人的基本操作、運行方法說明。
2021-05-14 10:41:0033 ABB機器人操作培訓(xùn)課程免費下載。
2021-05-12 09:38:3845 本手冊解釋ABB機器人的基本操作、運行。
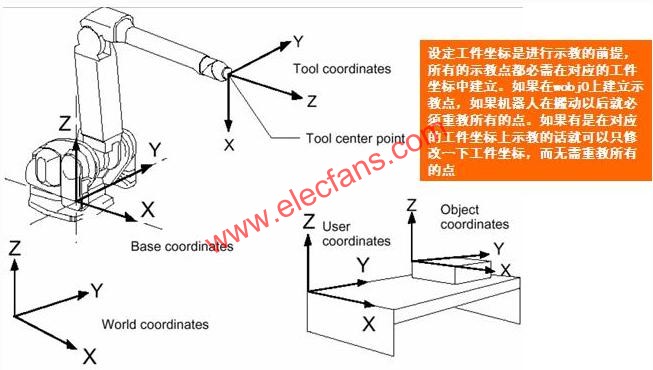
2021-05-07 11:38:1041 BASE坐標用來確定機器人空間上的坐標點,而TOOL則用來確定機器人以什么樣的姿態(tài)去這個軌跡點。
2021-04-25 17:36:223617 
在今年春晚上瀟灑揮毫的協(xié)作機器人——“阿福”,想必機器人界都不陌生。這款機器人是abb機器人于2015年推出的YuMi?協(xié)作機器人,它是abb機器人全球首款真正意義上的人機協(xié)作雙臂機器人。YuMi?協(xié)作機器人問世五年以來,受到了業(yè)界廣泛的關(guān)注與好評。
2021-03-06 10:12:325131 ABB(中國)有限公司董事長顧純元博士表示,制造業(yè)的整個轉(zhuǎn)型正在加速,ABB機器人利用工博會這個平臺發(fā)布了最新的IRB 1300小型機器人。雖已參加了十幾屆工博會,但今年尤其感到非常自豪,是因為ABB不僅展示了傳統(tǒng)的機器人產(chǎn)品和機器人自動化方案,而且涵蓋了人工智能的技術(shù)。
2020-09-21 17:38:394162 坐標機器人又稱單軸機械手,工業(yè)機械臂,電缸等,是以XYZ直角坐標系統(tǒng)為基本數(shù)學(xué)模型,以伺服電機、步進電機為驅(qū)動的單軸機械臂為基本工作單元,以滾珠絲桿、同步皮帶為常用的傳動方式所架構(gòu)起來的機器人系統(tǒng),可以完成在XYZ三維坐標系中任意一點的到達和遵循可控的運動軌跡。
2020-08-24 09:50:331629 ABB機器人提供CC-Link總線的支持。ABB機器人通過DSQC 378B(如下圖)模塊,把CC-Link協(xié)議轉(zhuǎn)化成Devicenet協(xié)議,與機器人控制器通訊。
2020-03-24 08:00:007 ABB機器人如何建立外部TCP,一般情況下我們的工具是安裝在機械手法蘭盤上的,工件裝在本體之外。工具坐標也是也是以tool0為基礎(chǔ)所衍生出來的坐標,工件坐標以wobj0為基準所衍生出來的坐標。在當我們要建立外部TCP時,剛好和之前相反,也就是需要要把工具安裝在機械手本體之外,工件裝在機械手法蘭盤上。
2019-11-02 05:56:0011994 焊接機器人最終加工對象就是工件與焊嘴之間的坐標的設(shè)定及使用。
2019-09-21 10:33:118078 ABB工業(yè)機器人常見故障處理
2019-04-28 15:44:4539695 ABB機器人如何與相機通訊1)機器人與相機一般采用socket通訊(TCP/IP)。所以機器人需要有pc-interface選項。
2019-01-27 09:09:3215651 
1、半年保養(yǎng):
(1)每季度對ABB機器人電路板上灰塵進行清理,可用ABB機器人電路板專用清洗液進行清洗,將ABB機器人電路板上灰塵清洗完畢后,用吹風(fēng)機將ABB機器人電路板吹干即可。
(2)觀察電路中的電子元件有沒經(jīng)過高溫的痕跡,電解電容有沒鼓起漏液現(xiàn)象,如有應(yīng)進行更換。
2018-12-15 10:43:402928 欣賞過ABB機器人在《對話·寓言2047》中的樂隊震撼演奏,聆聽過ABB機器人YuMi在意大利指揮的歌劇,感受過ABB機器人在豪華游輪上的精彩演出……今天,小編又有新東西迫不及待地要和你們分享啦!ABB機器人與人完美協(xié)作表演現(xiàn)代舞!
2018-10-18 15:06:493305 全球知名機器人企業(yè)ABB在工博會第一天召開了媒體發(fā)布會,ABB機器人全球總裁倪思德、ABB機器人業(yè)務(wù)中國區(qū)負責(zé)人李剛先生以及ABB機器人業(yè)務(wù)全球市場和銷售總監(jiān)Steven Wyatt出席了本次發(fā)布會。
2018-10-05 08:38:006100 如今,ABB機器人已經(jīng)在中國擁有強大的本地研發(fā)、本地生產(chǎn)和本土服務(wù)團隊,擁有2,000余名員工,遍布20余座城市。2005年,隨著ABB機器人研發(fā)中心和生產(chǎn)基地在上海成立,ABB成為最早在中國開展工業(yè)機器人本地研發(fā)和本地生產(chǎn)的跨國企業(yè)。
2018-05-18 11:14:0812398 一、如何配置ABB機器人Profinet從站
1、機器人需要有888-2或者888-3選項(使用控制器網(wǎng)口),或者840-3選項(使用Anybus網(wǎng)口)
2018-05-11 15:27:5954854 
RobotStudio是ABB機器人的離線仿真調(diào)試軟件,還可支持VR體驗。
今天就來好好介紹一下這款ABB機器人的專屬強大軟件!
2018-04-14 10:21:2830248 ABB是全球領(lǐng)先的工業(yè)機器人技術(shù)供應(yīng)商,提供包括機器人本體,軟件和外圍設(shè)備在內(nèi)的完整應(yīng)用解決方案。模塊化制造單元及服務(wù)。ABB機器人在全球53個國家、100多個地區(qū)開展業(yè)務(wù),全球累計裝機量30余萬臺,涉及廣泛的行業(yè)和應(yīng)用領(lǐng)域。我們致力于幫助客戶提高生產(chǎn)效率、改善產(chǎn)品質(zhì)量、提升安全水平。
2018-03-12 15:28:4319229 針對借助激光跟蹤儀標定機器人所涉及的坐標系統(tǒng)一問題,對基于空間幾何法擬合建立的基坐標系與機器人理論基坐標系的轉(zhuǎn)換關(guān)系進行了研究,提出了一種基于對偶四元數(shù)法的機器人基坐標系標定方法。利用指數(shù)積公式推導(dǎo)
2018-03-07 10:43:522 使用LabVIEW和用于DENSO的ImagingLab Robotics庫,機器視覺和機器人系統(tǒng)可以集成在一個應(yīng)用程序中。本文介紹了使用相同坐標系統(tǒng)在機器視覺系統(tǒng)和機器人系統(tǒng)之間進行標定的方法
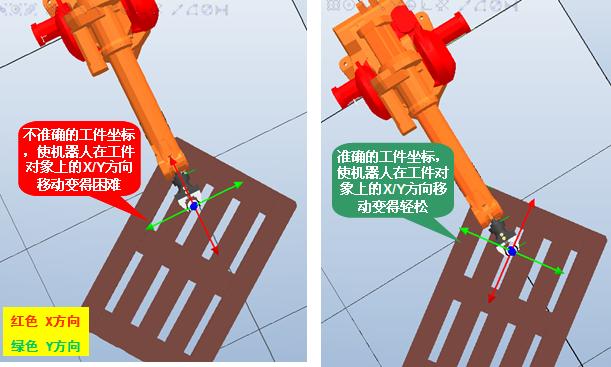
2017-11-17 17:03:2512309 設(shè)定工件坐標是進行示教的前提,所有的示教點都必需在對應(yīng)的工件坐標中建立。如果在wobj0上建立示教點,如果機器人在搬動以后就必須重教所有的點。如果有是在對應(yīng)的工件坐標上示教的話就可以只修改一下工件坐標,而無需重教所有的點。
2017-10-17 17:06:494 TCP的設(shè)定原理 1、首先在機器人工作范圍找一個非常精確的固定點作參考點。 2、再在工具上找一個參考點(最好在工具中心) 3、操縱L 具上的參考點以最少四種不同的姿態(tài)盡可能接近固定參考。 4、機器人通過四組解的計算,得出TCP坐標。
2017-10-17 17:03:509 介紹了ABB公司的機器人應(yīng)用協(xié)議RAP,該協(xié)議提供了一個ABB S4 系列機器人控制器的應(yīng)用接口,利用協(xié)議中的服務(wù)可以和機器人通訊得到機器人的各項參數(shù)。詳細闡述了基于遠程過程調(diào)用RPC 的RAP協(xié)議
2017-10-16 09:56:319 一、ABB機器人簡介 1974年發(fā)明世界第一臺全電機驅(qū)動機器人 2001年成為全球首家機器人銷量突破10萬臺的制造商 2007年底全球機器人銷量達到16萬臺 3%的收入投入研發(fā) 1994年在上海成立
2017-09-29 16:46:1815 ABB機器人程序指令匯總.........
2015-12-23 14:50:4078 ABB工業(yè)機器人的基礎(chǔ)教課..............
2015-12-23 14:50:1390 ABB機器人的優(yōu)勢-紙箱碼垛........
2015-12-23 14:48:0518
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論