 電子發燒友App
電子發燒友App


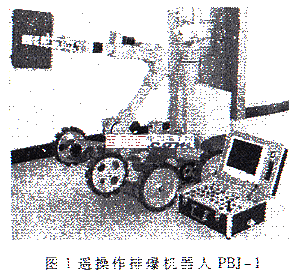
??? 移動機器人由于具有優越的機動性和靈活性而備受青睞,在許多場合投入實際應用,如核工業檢測,消防、火場檢測,有毒、易燃、易爆氣體場所探測,采礦、星球探測及無人戰場等。為了適應不同環境下的應用,移動機器人控制系統的硬件和軟件結構也不相同。本文涉及到的移動機器人是應用在防爆系統中,控制系統要求高穩定性、可靠性和實時性,采用西門子的S7-200系列的PLC作為控制器對其進行控制是一種既經濟又能充分滿足設計要求的有效方法。?
1 移動機器人控制系統的硬件設計?
1.1 控制系統組成及PLC控制原理?
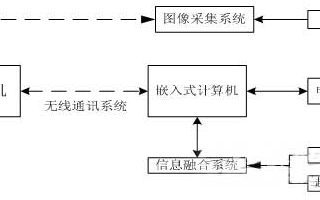
??? 一般的控制系統采用工控機控制整個系統的工作,工控機工作可靠、控制準確、使用方便。防爆機器人一般工作在室外環境和野外環境,工作環境惡劣。作為移動機器人,整個控制系統要求盡量輕便,這時若采用工控機則整個系統不夠方便、靈活。PLC具有良好的穩定性、結構輕巧,采用兩個PLC作為上、下位機,則系統輕巧靈活。根據操作和控制要求,控制系統選用西門子公司的S7-200系列的PLC,該PLC可以滿足多種多樣的自動化控制需要。由于具有緊湊的設計、良好的擴展性、低廉的價格以及強大功能的指令,使得整個控制系統的性價比大大提高,操作也簡單易行;同時,系統的可靠性、穩定性和控制的準確性也得到了保證。控制系統結構如圖1所示。?
?

?
??? 此防爆機器人的控制系統主要由上、下位機兩部分組成。上位機PLC(CPU224)用于整個系統的啟停控制,控制臺上為一系列控制按鈕,控制臺將希望的機器人的動作傳到上位機的PLC和上位I擴展模塊(EM221)里,操縱桿將電位器的位置通過PLC的擴展A/D模塊(EM231)將模擬量轉化為數字量,通過上位PLC和下位PLC(CPU224)的通訊,將這些數據傳輸到下位PLC。同時,上位機接收來自下位機的溫度、位置、角度等狀態信息。為了將這些數據顯示,選用性價比較高的數碼管與上位PLC進行相應的連接,然后將這些數據準確地顯示出來。防爆機器人機體上的攝像頭將機器人工作現場的畫面傳送到控制臺的顯示器上,在顯示器上實時反映機器人的工作狀態,便于操作者根據實際情況控制排爆機器人的動作。?
??? 下位機的PLC一方面接收上位機傳過來的指令,并和O擴展模塊(EM222)一起通過繼電器組對直流電機驅動器進行控制而對相應的直流電機動作進行控制,完成操作者希望的機器人的動作;另一方面,從工作現場采集到溫度、位置、角度等模擬信號,通過模擬量擴展模塊(EM231)將其模擬量轉換為數字量。通過與上位機PLC的通訊,將這些數據傳送到上位PLC上。?
1.2 數據信號傳輸媒介?
??? 數據信號傳輸媒介多用光纜和電纜,光纜傳輸容量大,傳輸距離長,抗電磁干擾能力強,但是對安裝技術要求高,并且價格相對昂貴。電纜作為信號傳輸媒介,價格便宜,安裝方便,數據傳輸準確、快速,但是有線通訊有許多局限性,例如整個系統由于電纜的存在而不夠靈活。?
??? 在實際使用過程中,為了解決有線通訊的局限性,采用無線數傳模塊進行數據信號的傳輸。無線數傳模塊體積小、使用方便,但是數據傳輸的誤碼率比較高,易受電磁干擾。這里采用的TDX-1000無線通信模塊包括無線接收、發射、FSK調制方式,并采用前向糾錯信道編碼技術,提高了數據抗突發干擾和隨機干擾的能力。接口方式是5V TTL電平兼容接口,無線通信模塊是半雙工的,收/發的切換通過收發控制信號線實現。?
2 軟件系統的設計?
2.1 控制系統控制流程?
??? 控制系統的控制流程如圖2所示。?
?

?
??? 系統的控制過程為:用戶將希望的機器人的動作作為指令輸入到控制面板上,PLC對這些指令進行處理,轉換為數據,發送到下位PLC上;下位PLC接收到上位PLC的數據后,將這些數據轉換為控制信號,控制機器人體上的直流電機,完成相應的機器人動作。與此同時,下位機采集由傳感器發來的現場信號,并進行處理,從而轉換成數據傳送到上位機上;上位機接收下位機發來的現場的數據,通過數碼管將這些數據顯示出來。?
2.2 數據傳輸格式?
??? S7-200系列產品的通信模式有兩種:一種是點對點通訊協議,用于S7-200與其編程器或西門子公司的人-機接口產品之間的通訊;另一種是對用戶完全開放的自由口模式,用戶根據實際系統的應用要求,自行規定通訊協議。本系統是兩個PLC之間進行通訊,使用自由口通訊協議。上、下位機PLC之間的通訊數據傳輸的波特率為9600bps,奇校驗,數據的格式是1位起始位、8位數據位、1位FCS校驗位、1位停止位。數據格式如圖3所示。?
?

?
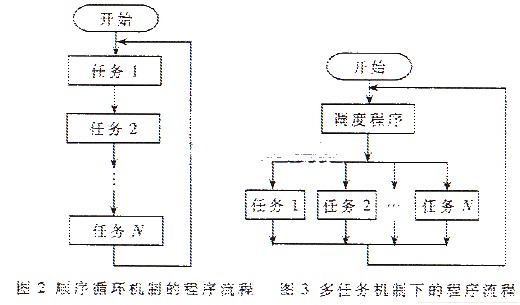
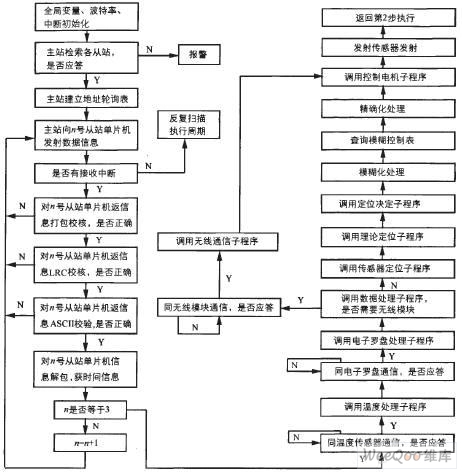
2.3 控制系統的程序流程?
??? 根據移動機器人工作的要求,確定機器人各個電機工作的相互關系,畫出程序流程圖,再由PLC的輸入輸出的邏輯關系編寫梯形圖。其上、下位機的程序流程圖如圖4(a)、(b)所示。限于篇幅,各子程序的流程圖本文不再給出。?
?

?
2.4 提高無線通信可靠性的方法?
??? 系統采用無線通信還涉及到許多問題,包括:(1)無線通訊的收發切換問題;(2)無線收發模塊易受電磁干擾,數據傳輸時誤碼率比較高。?
??? 采用以下幾種方法對產生的問題進行解決。第一:關于收發切換引起的延遲。在半雙工通訊中,波特率一定的條件下,系統的響應時間主要取決于PLC的最大指令執行循環時間和無線收發模塊的收發切換時間。PLC的最大指令執行循環時間由PLC的軟件系統結構決定,在進行編程的時候,充分考慮這些因素進行編程。第二:關于數據傳輸的穩定性和準確性。為了保證數據傳輸的穩定性和準確性,采取了幾種方法。(1)對發送來的每一組數據檢查起始字節和結束字節,采用奇校驗;(2)采用工程上的循環冗余校驗(CRC),這種方法是對發送的數據按字節進行異或運算,將得到的結果作為FCS校驗碼同要發送的數據一起發送到下位機,下位機將收到的數據進行同樣的運算,將結果與FCS比較來確定收到的數據是否正確;(3)此外,在收發切換與數據發送之間插入一定的延時,延時時間大于無線收發模塊的收發切換時間,易于保證數據傳輸的穩定性。實驗證明,以上方法大大提高了通訊系統的可靠性,降低了誤碼率,減少潛在的故障。?
??? 本系統采用兩個PLC分別作為上、下位機進行移動機器人的控制,可使整個系統的性能穩定,易于操作,維護方便,性價比高。本系統已經成功應用于防爆機器人上,在實際的應用中受到好評。










 工商網監
工商網監
評論