 電子發燒友App
電子發燒友App


前言
由于能夠節省能源,并采用了更為先進的控制技術,感應電機變速控制在過去十年中的使用量呈現顯著增長態勢。這對那些只需要在很少的時間段內進行全速運行的應用來說尤其如此,如某些風扇和泵站負荷等。由于線路連接交流電機具有速度難以控制的特征,類似的負荷需求變化過去一直通過控制電機和載荷來進行處理,這與用油門踏板驅動汽車、用剎車控制速度非常相似。然而,通過直接控制電機的運行速度,與直接的線路連接電機操作相比,某些應用可節省高達75%的電能。
在實現對變速交流電機的控制方面,有多種先進程度各不相同的技術。如果所有運行速度都需要高帶寬扭矩控制,就要采用轉子轉速傳感器或利用電機本身作為反饋傳感器的現場控制技術。由于交流感應電機在本質上不同步,因此完成這一操作所需的計算通常需要一片高性能控制器來完成,比如DSP。然而,實際上很多(如果在數量上不是大多數的話)變速交流電機控制應用只要求適度的扭矩控制性能,頻率可以低至5Hz。在這些情況下,只控制電機的波形電壓和頻率(伏特/赫茲控制)是最為經濟的手段。
如果不考慮所選的控制拓撲,不可否認,開發變速驅動器的很大一部分任務就是軟件的開發以及與之相關的工具投入。由于MC3PHAC不需要編程,就省去了這一部分要求,從而可以縮短項目的總體開發和調試時間。作為一個“固定”解決方案,平衡這些優勢必須以降低靈活性為代價來實現。然而,該解決方案在設計之初就已經充分考慮到這一點,確保通常由高性能交流驅動的大多數系統關鍵參數都能進行動態配置,從而使MC3PHAC得以用于多數變速配置之中。此外,MC3PHAC還使用了一個串行接口,該接口采用特殊的通信協議,使PC或微控制器可以作為主機來實時配置運行特征并控制電機。例如,通過主機軟件,計算機可以對伏特/赫茲關系進行完全控制,使MC3PHAC能用于可變扭矩和恒定扭矩的變速應用中。
先進的電機控制 PWM
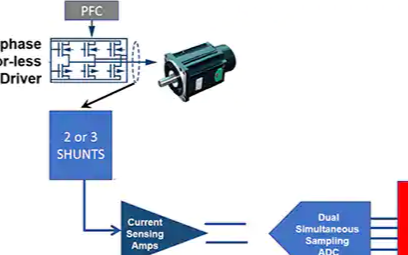
MC3PHAC功能的核心是一個先進的PWM模塊,它是專為滿足高性能交流驅動的苛刻要求而設計的。該模塊在8 MHz 頻率上運行(循環發送間隔時間為125nS),在3組配套PWM中生成6個居中排列的PWM信號。這就使MC3PHAC能直接連接到幾乎所有三相交流電機驅動都固有的變頻器上,如圖1所示。高端PWM信號的極性可以獨立于低端PWM極性進行指定。在每個補充信號線對的on-times 之間插入停滯時間,而且停滯時間可以在125 nS的增量內調整為0至32 μS之間的任何值。

圖 1. 使用MC3PHAC的典型三相交流電機驅動
PWM信號的頻率可以指定為表1顯示的4個PWM頻率及每個頻率的有效PWM分辨率中的一個。每路PWM輸出從一個512條目的表中合成而來,該表由8比特值組成,如圖2所示。盡管這會把最大值分辨率的輸出波形限定在8比特,但并不意味著PWM分辨率本身也限定在8比特,對那些較小的調制指數來說尤其如此。PWM分辨率定義了在整個調制范圍(0%到100%)內可以有多少個不同的值,這些值與輸出波形的最大值分辨率不同。

表1. PWM頻率及相應的分辨率
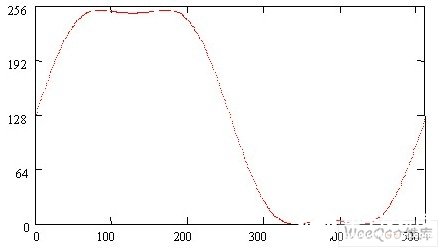
圖2. MC3PHAC中用于波形合成的表
與波形表條目的分辨率相比,對波形失真產生更大影響的另外一個因素就是更新電機波形的取樣頻率。由于PWM模塊的作用如同取樣和保持功能,因此波形失真會以兩種方式體現出來。首先,取樣和保持功能會造成相位滯后,當取樣頻率降低時相位滯后就會增加。在生成開放環路波形時,通常來講不會構成問題。然而,當執行任何封閉環路功能(如總線-紋波補償)時就必須把它考慮進去,這一點留待以后討論。其次,由于PWM值一直要保持到下一次更新,因此會導致“步進式”波形的出現,與參照正弦波相比,會造成振幅失真。該失真與波形的第一個導數成比例,這意味著從圖2中合成的輸出波形在零交叉附近快速變化時將會出現更嚴重的失真。
由于對所有非零導數功能來說,失真與相位的不確定性有關,因此取樣頻率和輸出電機的波形頻率也會影響失真。對于除15.9kHz外的所有載波頻率來說,MC3PHAC PWM以5.3kHz的取樣頻率更新,從而導致+/- 95μS的定時抖動。對15.9kHz載波來說,PWM以4kHz的頻率更新,其定時抖動為+/-126μS。這會導致與電機波形頻率成比例的相位的不確定性,如圖3所示。當電機波形的頻率降至10Hz以下時,由于達到了512點波形表的相位分辨率,相位抖動沒有什么改進。在這兩個更新頻率上,結果都是電機波形與使用更高波形分辨率的設計相比,前者的精確性更高,但波形更新頻率要比后者低。
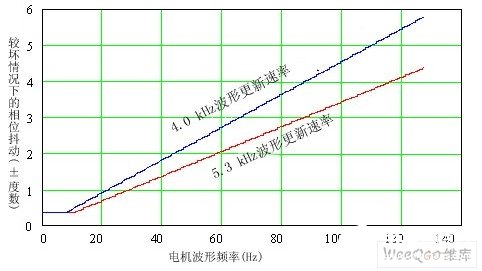
圖 3. 與電機波形頻率相關的MC3PHAC相位的不確定性
從圖2中我們可以看出,波形中包含了添加到正弦波的第三個諧波成分,與傳統的正弦調制相比,它把相到相的調幅提高了15%。然而,由于這種調制技術會導致共模第三諧波頻率成分,因此,它把MC3PHAC的使用限制在擁有浮接中心線(floating neutral)的三相負載上。此外,由于輸出電壓波形的總和不再為零,它還對三相輸出的合成技術帶來限制。
運行模式
MC3PHAC可以運行于以下兩種模式之一:獨立模式或主機模式。 模式選擇在加電啟動時根據管腳20的狀態進行。下面將詳細介紹這兩種模式。
獨立模式
在這種模式中,MC3PHAC運行參數通過連接到設備的無源組件來在加電啟動時配置。一旦MC3PHAC確定沒有外部主機(管腳20處于高電位),它就開始詢問外部連接的電阻器網絡以獲取運行參數,如速度范圍、停滯時間和電源穩壓器等。其它參數在系統運行過程中繼續實時輸入,如開始/停止、前進/后退、電機速度、PWM頻率、總線電壓和加速度等。從系統的總成本角度看,獨立模式是最經濟的模式,因為在MC3PHAC運行時不需要主機控制器。圖4顯示了獨立模式中使用MC3PHAC的電路示意圖。

圖4. 以獨立模式運行的MC3PHAC示意圖
主機模式
MC3PHAC的第二種運行模式稱為主機模式,該模式利用一臺運行主機軟件(可以從摩托羅拉公司購買)的PC或模仿主機軟件命令的微控制器。與使用離散組件來指定運行參數不同的是,它們直接從主機上通過軟件進行控制。
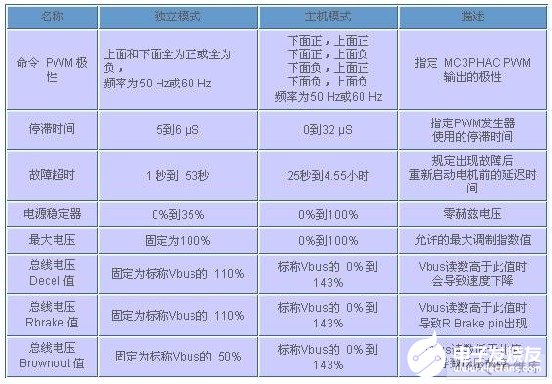
在加電啟動后,MC3PHAC可以通過讀取管腳20的值(邏輯低電位)檢測到外部主機。在MC3PHAC繼續初始化,進入一個惰性的安全狀態后,它仍然處于休眠狀態,等待串行接口接到指定運行參數的命令。在接受到某些關鍵參數(如PWM極性和停滯時間信息等)前,MC3PHAC不允許激活電機。主機模式允許外部控制器監視并控制MC3PHAC運行的所有方面。與獨立模式相比,它允許對系統的運行環境進行更全面的控制,詳見下表。
表2. 獨立運行模式和主機運行模式比較
在主機模式中,我們甚至可以通過互聯網進行遠程控制。通過運行連接到MC3PHAC的獨立服務器應用(也可以從摩托羅拉購買),運行前面提到的主機軟件的遠程計算機可以從世界的一個地方對另一個地方的電機進行控制。
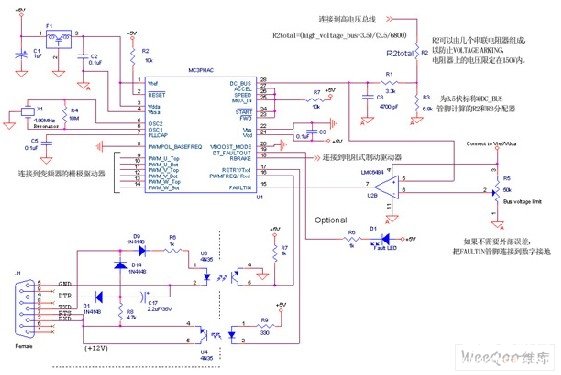
圖5. 主機模式下的MC3PHAC 示意圖
主機模式下使用MC3PHAC的電路示例如圖5所示。
圖 6 顯示了使用摩托羅拉接口主機軟件控制MC3PHAC的GUI。
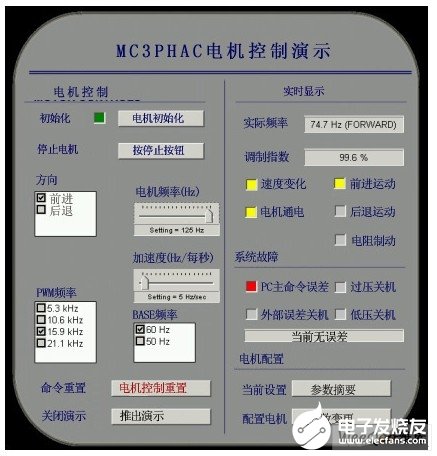
圖 6. MC3PHAC使用的主機軟件GUI界面
總線漣波消除
在很多交流驅動中,變頻器由一個擁有較大并聯連接的電容器(作用如同一個能量庫)的直流總線供電。為了防止總線上的波動影響到電機波形,該電容器的容量通常設計得很大,特別是使用標準的整流器為總線供電時。這些波動可能是交流電源線上產生的電涌造成的,也可能是電機快速減速的再生,甚至可能是由交流電路整流引起的更高頻率波動。由于MC3PHAC采用較高的總線反饋取樣頻率,所有這些失真都可以進行補償。根據PWM頻率,每18?或252μS取樣DC_BUS輸入管腳,讀數被用來實時補償調制指數以調整電機電流。盡管很多交流驅動都實施相似的功能,但由于它們的總線電壓取樣頻率太低而不能進行實時漣波去除,因此它們只能對較低的頻率失真進行補償。
請參見圖7,假設晶體管以零停滯時間以補充方式驅動,定義輸出波形平均電壓的方程式如下:
方程式1
![]()
其中,表示平均輸出電壓th(t)表示PWM波形的峰值時間 T表示PWM時間段Vbus(t)表示直流總線的電壓
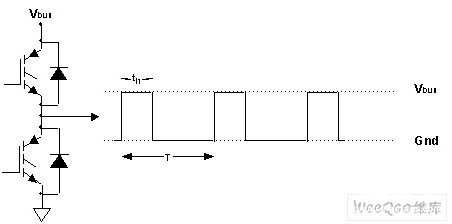
圖7. 從半橋中生成的PWM波形
需要注意的是,方程式1并沒有假定Vbus 是一個常量,而是時間T的一個函數。然而,讓我們假設Vbus有一個最合適的值,并把這個值稱為Vnorm,這樣一來,當Vbus(t)等于Vnorm時,根據指定的PWM高時間和時段,就等于值。然而,當Vbus(t)不等于Vnorm時,通過在方程式1中為調制項 th(t)/T應用一個修正因子,仍然有可能和相等,如方程式2所示。

其中,Vnorm表示Vbus(t)的最佳值或參照值[ ]內的項是修正因子
由于略去了Vbus(t) 項,我們發現,總線電壓中的任何干擾都不會影響輸出電壓。而且,由于th(t)/T比總是一個正的小數值,所以我們必須保證不管希望輸出什么樣的波形,都應該進行適當調整和偏移以反映這一點。舉例來說,如果需要正弦調制,那么正弦波調幅就應該進行調整,使它不超過最大值1,而且波形應偏移1/2,以實現動態范圍的完全利用。如果我們修改方程式2來反應這一點,計算輸出的所有三種相位,我們會得出如下方程式:

其中,X是輸出相位的編號(1,2,3) WO是輸出波形的頻率M是調制指數(0到1)
方程式3消除了輸出波形的所有總線漣波。然而,這并不是最理想的狀況,因為輸出波形在1/2 Vnorm固定電壓上有一定的誤差,真正的固定電壓應該是1/2 Vbus(t)。需要注意的是,調制模型由兩項組成,分別是1/2 直流項和交流正弦項。在方程式3中,這兩項都可以修正,事實上卻只有交流項可以修正。如果我們從直流項對修改進行去耦操作,交流波形就可以在地面和Vbus(t)的動態范圍內以自我為中心。重新書寫方程式3來實現去耦,我們就可以得出方程式4。

這是MC3PHAC中使用的技術。Vbus(t)在每個PWM更新間隔(18?或252μS)進行取樣,并被分成表示3.5伏Vnorm值的數。由此產生的修改因子只被應用到調制指數(M)中,以修改Vbus(t)中因干擾引起的輸出波形的任何失真。由于直流項不能應用修改因子,在偏壓上就會出現一個人為產生的噪聲(Noise Artifact)。然而,由于這個噪音對所有三個輸出波形來說是共模信號,它將被電機拒絕,假定它的中間節點是浮動的。
圖8顯示了1/2hp電機的實際電流波形圖,該電機由60 Hz上的單相115 V交流輸入電壓提供電源,且有大量的總線漣波。在第一個波形圖中,MC3PHAC 總線漣波消除功能被關閉,波形中的失真反映了這一點。第二個波形圖顯示了同樣的情況,但我們明顯地看到它的總線漣波消除功能被激活并有效地消除了漣波。
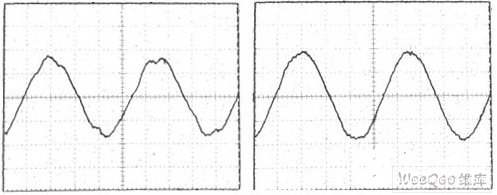
圖8. MC3PHAC的總線漣波消除功能的影響
速度整平和更改
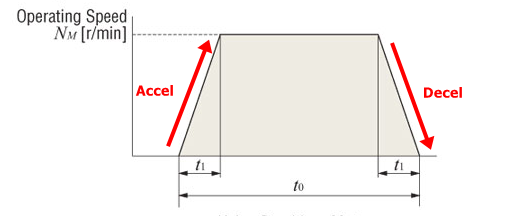
假定ACCEL管腳上的電壓保持一個常量,或者加速度值通過主機軟件被設置為一個常量,MC3PHAC就會生成一個線速配置文件。為了獲取其它類型的配置文件,當速度沿斜線上升時,加速度值必須動態變化。例如,為了獲得拋物線速度配置文件,當速度沿斜線上升時,加速度必須在線性配置文件中變動。
MC3PHAC中的速度配置程序(velocity Profiler)不但要負責控制電機的速度,還要負責控制電機的電壓,因為這兩者在每赫茲伏特控制器中彼此相關。為了實施MC3PHAC中嵌入的所有功能,速度配置程序每秒需要進行很多計算,這會影響到速度更新的頻率。如果計算頻率太低,就會創建步進式速度配置文件,從而導致速度沿斜線上升時產生扭矩干擾和振動。
MC3PHAC采用兩種技術來共同消除這個問題。第一種技術是速度整平,如圖9所示。
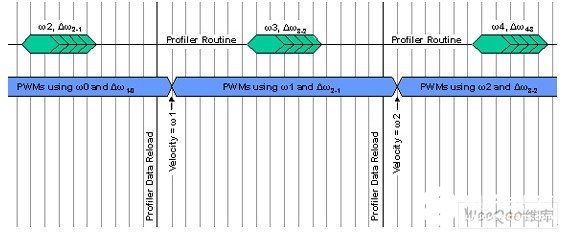
圖 9. 速度整平(Velocity Pipelining)
各個垂直的分區表示PWM的更新間隔。正如我們所看到的,在每16個更新間隔上,觸發一次速度配置程序以合成新的速度和電壓信息。在圖中,速度配置程序的第一次觸發生成一個標為w2的速度。
然而,需要指出的是,應用到該電機的PWM波形直到后來才反映該轉速。這種“整平”的作用允許PWM波形在原有的速度數據上構建,同時速度配置程序生成新的速度數據。由于速度配置程序的速度輸出波形的絕對時間參照是任意的(過度再生情況中的減速放緩除外),這種速度整平表示的相位延遲將不會對系統造成負面影響。
為了進一步提高速度波形的分辨率,MC3PHAC還采用了一種修改技術,允許速度波形在每個PWM更新間隔上根據新的值進行更新。圖10顯示了一個速度上升的波形示例,其中來自配置程序的各個具體的速度輸出值分別用一個圓點表示。這些更新每3或4μS發生一次(視PWM頻率情況而定),在加速和減速過程中還可能導致電機達不到最優性能。
每次觸發配置程序時,都會提供三個輸出值,分別是原有速度、“delta”速度和調制指數(未在圖10中顯示)。在每個PWM更新間隔,delta速度值都會分成更細的速度增量。通過在每次更新PWM時把這些增量添加到原有的速度值中,就會生成一條新的速度曲線,該曲線增加了16x分辨率,所圖10所示。因此,電機可以非常平穩地從一個速度過渡到另一個速度。
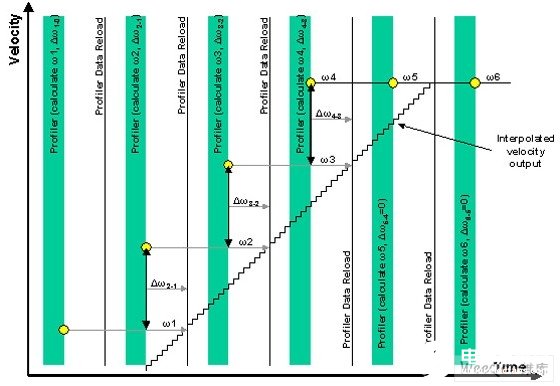
圖10. 速度修改(Velocity Pipelining)
系統監視和保護
由于MC3PHAC設計用來控制處理危險的高電壓和高電流的逆變器,因此它融入了一系列系統監視和保護功能。在有些情況下,當探測到問題時,MC3PHAC會立即做出響應,努力降低故障的影響。在另外一些情況中, PWM會立即關閉,直到問題解決,同時完成超時操作,表明可以安全重啟。對兩種類型的故障模式(低Vdd 和晶體探測丟失)來說,MC3PHAC會重啟,致使PWM立即進入高抗阻狀態,并迫使重新設置連接到復位管腳的所有外部硬件。每種保護功能都按問題的嚴重性在下面進行詳細討論。
高總線電壓
由于MC3PHAC 為交流驅動提供的PWM類型會導致變頻器的完全4 象限運行,因此能量可從電機回傳給直流總線。然而,在很多情況下,會阻止這種能量返回交流主線,而是作為1/2CV2儲存在總線電容器中。在大多數情況下,這種情況都是電機大幅減速的結果。如果總線電壓超過表2中描述的“總線電壓Decel值”的限制,MC3PHAC就會減緩降速以調整再生處理。而且,如果總線電壓超過表2中描述的“總線電壓Decel值”限制,MC3PHAC就會激活RBRAKE管腳,在電容器上打開一個電阻負載,釋放再生能量而不是把它儲存起來。圖11顯示了通過1/2 hp電機的加速和減速獲得的波形及其對總線電壓的相應影響。在這種情況下,只使用電阻制動來限制總線電壓,并把“總線電壓Rbrake值”設置為其默認值的110%。
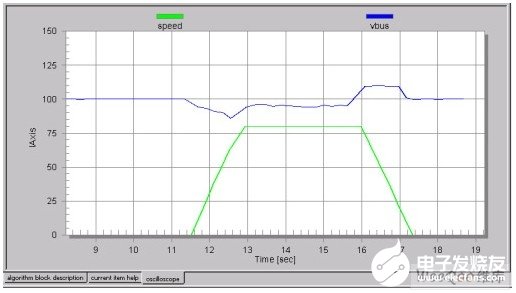
圖11. 用RBRAKE Clamping加速和減速時直流總線的電壓
過高的總線電壓
如果上面描述的技術在限制直流總線電容器上的電壓時并不成功,總線電壓超出表2中描述的“總線電壓過壓值”限制,PWM輸出就立即關閉。在總線電壓降至安全限制范圍內前,它會一直保持關閉狀態,并出現指定的超時操作,顯示可以安全地為變頻器接通電源。
低壓總線
如果總線電壓降得過低(如在電力管制條件下),某些由總線供電的系統的功能就會不穩定,導致其它系統問題。如果總線電壓降至表2中描述的“總線電壓過壓值”門限以下,PWM輸出將被關閉,并根據上面對過壓條件的描述重新激活。
外部故障條件
MC3PHAC內置有一個稱為“FAULT IN”管腳的特殊輸入單元,以處理其它系統故障。用戶應自己決定該管腳監視哪些系統參數。與以前討論過的故障模式不同,那些故障模式都是基于以PWM更新取樣頻率對DC BUS IN管腳的取樣,而它則是數字輸入,一旦確定是數字輸入,就會在使用后立即關閉PWM。如果輸入被拒絕,PWM就會在指定的超時,表明可以安全地為變頻器接通電源后重新激活。
時鐘檢測丟失
放松MC3PHAC的輸入時鐘(或任何標準的微型時鐘或DSP)可能意味著電機控制系統的潛在危險環境。事實上,有些法律機構正強制要求對某些設備應用進行“失效晶體”測試,以確認所有可能造成安全危險的應用的電源都已關閉。在交流電機控制系統中,最可能出現的故障是PWM信號可能凍結于目前條件,使變頻器中的某些晶體管打開。這樣,電機、變頻器或兩者就很容易毀壞。借助MC3PHAC,這些問題將不復存在,因為如果輸入時鐘丟失,設備會立即重新設置系統并關閉PWM輸出。
低Vdd保護
與輸入時鐘的丟失一樣,較低的Vdd 值可能導致危險的系統故障,因為MC3PHAC和其它關閉Vdd的電路功能會發生混亂。MC3PHAC內置一個板上電壓監視器,當Vdd 的電壓降到4伏以下時,它會重新復位系統。它允許使用5伏電源,不管其輸出電壓是否規定為5%或10%的容許量。
結論
到此,我們已經全面介紹了一款控制交流感應電機速度的器件,它可以應用到大多數開放式環路、伏特/赫茲控制的應用中而無需對其進行編程。這樣就可以極大地減輕一線開發工作量并降低開發成本,同時它還保持了一定的靈活性,以滿足眾多變速應用的要求。
MC3PHAC向市場推出幾種標準封裝。其中有兩種28管腳封裝:28管腳、6英寸寬、塑料DIP和28管腳塑料SOIC。此外,我們還提供32管腳(QFP) 塑料四方扁平封裝。所有封裝都能在從-40℃ 到105℃的溫度范圍內工作。目前,該芯片還可以提供無鉛封裝的版本。
責任編輯:gt


















 工商網監
工商網監
評論