步進電機都是通過脈沖信號控制的,一般都是一個用來產(chǎn)生一定頻率脈沖的單片機(脈沖頻率用來控制速度),經(jīng)過信號隔離放大(達到驅(qū)動電機的電壓)來驅(qū)動控制步進電機。
2013-08-19 10:04:28 4162
4162 步進電機有一個技術(shù)參數(shù):空載啟動頻率,即步進電機在空載情況下能夠正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機不能正常啟動,可能發(fā)生丟步或堵轉(zhuǎn)。
2020-09-08 16:01:363690 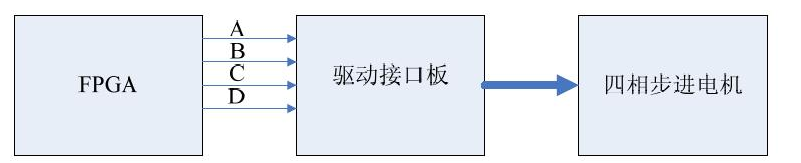
對步進電機的控制通常使用PWM控制,改變頻率來控制速度,然后統(tǒng)計脈沖個數(shù)知道電機當前位置,可以很容易實現(xiàn)加減速規(guī)劃,或者不考慮加減速平穩(wěn)性,直接以小于最大啟動速度的速度啟動,發(fā)完給定個脈沖后直接
2022-10-14 11:28:383482 步進電機是將電脈沖信號,轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,又稱為脈沖電機。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響。當步進驅(qū)動器接收到一個脈沖信號時,它就可以驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度。
2023-03-01 09:54:494875 
步進電機是將電脈沖信號,轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,又稱為脈沖電機。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響。當步進驅(qū)動器接收到一個脈沖信號時,它就可以驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度,稱為“步距角”。
2023-03-14 09:37:213111 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應用極為廣泛。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化
2023-08-11 16:03:27330 
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進電機件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當
2011-10-04 10:52:582908 固定的角度一步一步運行的。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。步進電機可以作為一種控制用的特種電機,利用其沒有...
2021-07-12 08:59:24
一般在步進電機的書里面說的大多是這樣的:隨著步進電機的脈沖頻率增大,轉(zhuǎn)矩變小。但是都沒有具體說數(shù)學關(guān)系,有沒有公式之類的描述?
2016-01-18 09:34:00
一、前言步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件,在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉(zhuǎn)過一個
2021-07-08 07:57:57
針對客戶提出電機運轉(zhuǎn)時產(chǎn)生嘯叫聲,和啟動脈沖確定的問題,現(xiàn)明確兩個概念:步進電機的啟動頻率和空載啟動頻率。 步進電機的啟動頻率對生產(chǎn)廠家來說指的是自啟動頻率,因為客戶帶上負載后,負載的大小千差萬別
2021-08-31 06:24:09
步進電機是一種將電脈沖信號轉(zhuǎn)換成角位移或線位移的一種器件。在不超載情況下,步進電機的轉(zhuǎn)速和運動距離取決于控制電脈沖的頻率和數(shù)量。其控制精度主要由兩方面決定:1、步進電機的每步精度,以2相混合式步進
2021-09-16 06:56:37
何為步進電機和步進驅(qū)動器?步進電機的轉(zhuǎn)速與脈沖頻率的關(guān)系是什么?細分步進驅(qū)動器有何優(yōu)點?
2021-10-28 08:04:59
時,步進電機根據(jù)脈沖的信號轉(zhuǎn)動。在過于短的時間里,控制系統(tǒng)發(fā)出的脈沖數(shù)太多,也就是脈沖頻率過高,將導致步進電機堵轉(zhuǎn)。要解決這個問題,必須采用加減速的辦法。就是說,在步進電機起步時,要給逐漸升高的脈沖頻率
2016-01-11 15:02:13
與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。當然頻率必須在一定的范圍,頻率太快步進電機無法運作。會發(fā)出聲響。減速比:1/64,如果步進電機輸出1N.m的轉(zhuǎn)矩的話,通過減速箱轉(zhuǎn)換后的輸出力矩64N.m.
2021-08-31 09:01:18
步進電機的轉(zhuǎn)速與脈沖頻率步進電機的轉(zhuǎn)速與脈沖頻率成正比,即脈沖頻率越高步進電機的轉(zhuǎn)速也越高,但提高了脈沖頻率雖然達到了提速作用,卻損失了力矩。力矩隨脈沖頻率升高而下降的原因: 步進電機產(chǎn)生失步的兩個
2021-07-08 07:15:24
通過輸入脈沖信號來進行控制的, 即電機的總轉(zhuǎn)動角度由輸入脈沖數(shù)決定, 而電機的轉(zhuǎn)速由脈沖信號頻率決定。 步進電機的驅(qū)動電路根據(jù)控制信號工作, 控制信號由單片機產(chǎn)生。 其基本控制如下 :¥ 控制換相順序
2008-07-21 14:28:42
是以固定的角度(步距角)一步一步運行的,故稱步進電機。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,因此具有較高的定位精度。步進驅(qū)動器(步進驅(qū)動電源)向電動機繞組提供脈沖電流,步進電動機的運行性能決定于電動機與步進驅(qū)動器的良好配合。
2021-06-29 08:56:51
加速快慢,值越大越早達到最大速度。但是選擇加速度過大,將導致脈沖頻率增大過快,會導致步進電機丟步,從而卡死。最好選擇在5至10。 步進電機減速階段減速度(decel...
2021-07-08 09:53:16
基于ATMEGA32的脈沖控制2相4線步進電機,要求!!!!輸出脈沖平穩(wěn)。。。求各位大俠幫幫忙!!
2012-09-05 18:21:32
AL9910通用高壓高亮度LED驅(qū)動器的典型應用。 AL9910 / A高壓PWM LED驅(qū)動器控制器為整流線電壓范圍為85VAC至277VAC的離線高亮度LED燈提供了有效的解決方案。 AL9910以高達300kHz的開關(guān)頻率驅(qū)動外部MOSFET,開關(guān)頻率由單個電阻決定
2019-10-15 06:06:10
驅(qū)動代碼,包括正轉(zhuǎn)和反轉(zhuǎn)3. 主函數(shù)中調(diào)用說明主函數(shù)代碼如下:定時器中代碼如下:實物圖步進電機特點:它是通過輸入脈沖信號來進行控制的電機的總轉(zhuǎn)動角度由輸入脈沖數(shù)決定電機的轉(zhuǎn)速由脈沖信號頻率決定步進電機
2021-07-08 07:50:46
labview發(fā)射脈沖信號驅(qū)動步進電機
2015-05-30 10:33:36
第一個圖為控制步進電機轉(zhuǎn)速的程序,實際上是輸入的頻率(如幫助中所示),只是我通過換算變成輸入轉(zhuǎn)速。目前是輸入一個定轉(zhuǎn)速,點擊運行后,電機就在固定轉(zhuǎn)速下運行。現(xiàn)在我想令電機轉(zhuǎn)速按照正弦變化。我將轉(zhuǎn)速
2018-08-05 20:46:23
為什么STM32在步進電機頻率改變時加入延時程序其pwm脈沖會停止輸出呢?有何解決辦法?
2021-12-21 06:20:02
摘要: 在回答這個問題之前,先來了解下什么是步進電機和減速電機? 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進電機件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率
2021-09-03 07:20:33
以通過控制脈沖個來控制角位移量,從而達到準確定位的目的;同時您可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。2.步進電機分哪幾種?步進電機分三種:永磁式(PM),反
2021-07-08 06:11:15
的步進角,給一個脈沖,它就轉(zhuǎn)動一個步進角,于是它取名:步進電機第二個問題:步進電機的特性?在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當步進驅(qū)動器接收...
2021-07-08 10:01:44
位移的開環(huán)控制電機,又稱為脈沖電機。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響。當步進驅(qū)動器接收到一個脈沖信號時,它就可以驅(qū)動步進電機按設(shè)定...
2021-07-07 06:55:49
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,輸入脈沖總數(shù)控制步進電機的總旋轉(zhuǎn)角度,電機的速度由每秒輸入脈沖數(shù)目所決定,因此易實現(xiàn)機械位置的精準控制。
2019-10-24 08:08:21
定時器 1 的周期以更改頻率(不知道天氣更新tim1 事件是否發(fā)生)。一切都按預期工作,但大多數(shù)時候我的電機會抽搐,我假設(shè) tim1 周期的多次更新會在步進脈沖中產(chǎn)生一些毛刺。我沒有辦法確認。如果我在
2023-01-17 07:38:37
如何控制步進電機速度,假定設(shè)置為四細分數(shù),電機轉(zhuǎn)一圈所需要的脈沖數(shù)即為800個,要實現(xiàn)步進電機600轉(zhuǎn)/分的轉(zhuǎn)速,上位機應該發(fā)送的脈沖頻率計算方法:頻率的概念是一秒鐘的時間發(fā)送的脈沖個數(shù)所以,先計算
2021-07-08 08:20:45
定時器級聯(lián)-頻率 脈沖可控,驅(qū)動步進電機
2019-07-16 11:17:00
什么是步進電機?
步進電機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。通俗一點講:當步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進
2010-01-09 14:18:231780 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機。在未發(fā)生失步情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù)并不受負載變化的影響,當步進電機接收到一個脈沖信號時,電機就按設(shè)定
2016-08-29 18:59:592380 
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉(zhuǎn)過一個步距角。
2018-07-10 01:23:001788 海為S系列PLC有一路的高速脈沖輸出,一般情況下只能控制一臺步進電機進行工作。但是為了充分利用資源節(jié)約成本,可以利用正轉(zhuǎn)/反轉(zhuǎn)輸出脈沖的模式再增加兩個輸出端來控制兩臺步進電機進行工作。正轉(zhuǎn)脈沖和反轉(zhuǎn)
2017-10-09 09:06:14 3
3 步進電機是一種將脈沖信號變換成角位移的數(shù)字電磁執(zhí)行裝置。步進電機的角位移與輸入脈沖個數(shù)成正比,其轉(zhuǎn)速與脈沖頻率成正比,其轉(zhuǎn)向與脈沖分配到步進電機的各相繞組的相序有關(guān)。由于步進電機的轉(zhuǎn)角、轉(zhuǎn)速和轉(zhuǎn)向均可采用數(shù)字量(脈沖)控制,故步進電機廣泛應用于數(shù)字伺服領(lǐng)域。
2017-10-13 14:46:5120 作用把電磁能轉(zhuǎn)換成機械角位移。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率 和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉(zhuǎn)過一個步距角。脈沖的個數(shù)決定了轉(zhuǎn)角的大小,而脈沖的頻率決定了電機
2017-11-21 15:38:203 步進電機是靠接收脈沖電流來實現(xiàn)速度、位置和方向的控制,脈沖的多少決定步進電機的位置,脈沖的速率決定電機的轉(zhuǎn)速,脈沖的方向決定電機的轉(zhuǎn)向。現(xiàn)在大多數(shù)步進電機的控制方式就是用plc發(fā)脈沖給驅(qū)動器,驅(qū)動器
2017-12-14 15:46:1235485 進電機作為一種常用的電氣執(zhí)行元件,廣泛應用于自動化控制領(lǐng)域。步進電機的運轉(zhuǎn)需要配備一個專門的驅(qū)動電源,驅(qū)動電源的輸出受外部的脈沖信號和方向信號控制。每一個脈沖信號可使步進電機旋轉(zhuǎn)一個固定的角度,這個
2017-12-14 15:52:5320744 
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進電機件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當步進驅(qū)動器接收到一個脈沖信號,它就
2018-02-11 13:50:0014151 步進電機的調(diào)速一般是改變輸入步進電機的脈沖的頻率來實現(xiàn)步進電機的調(diào)速,因為步進電機每給一個脈沖就轉(zhuǎn)動一個固定的角度,這樣就可以通過控制步進電機的一個脈沖到下一個脈沖的時間間隔來改變脈沖的頻率,延時
2018-04-25 16:09:1224752 步進電機產(chǎn)生共振是因為電機接收的脈沖頻率等于步進電機的固有頻率,該頻率與驅(qū)動器的細分有關(guān)系。
2018-09-14 08:43:009061 減速步進電機與普通步進電機的區(qū)別有哪些?順力電機減速步進電機與普通步進電機的區(qū)別有哪些?下面順力電機小編來給大家詳細介紹。減速步進電機的轉(zhuǎn)速、停止的位置只會取決于脈沖信號的頻率以及脈沖數(shù),而不受負載
2018-12-13 16:50:243340 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進電機件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當步進驅(qū)動器接收到一個脈沖信號,它就
2019-07-31 17:35:0016 控制脈沖頻率低,此時轉(zhuǎn)子的速度高于步進電機定子旋轉(zhuǎn)磁場的速度。 還以上面的0.02S充電時間常數(shù)為例,脈沖頻率低,定子線圈充電充分,其產(chǎn)生的力矩就大,此時電機的負載如果較輕
2020-03-10 10:22:2027711 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。 在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進
2020-09-09 09:44:0213157 P110C操控3臺步進電機電路圖如下:FREO向步進電機操控器每輸出一個脈沖,1號步進電機就轉(zhuǎn)必定的視點,脈沖頻率高,步進電機轉(zhuǎn)速高,脈沖頻率低,步進電機轉(zhuǎn)速低,無脈沖輸出步進電機停轉(zhuǎn)。POOO操控步進電機的翻滾方向,POOO輸出高電平,步進電機正轉(zhuǎn),POOO輸出低電平,步進電機回轉(zhuǎn)。
2020-10-03 17:40:002125 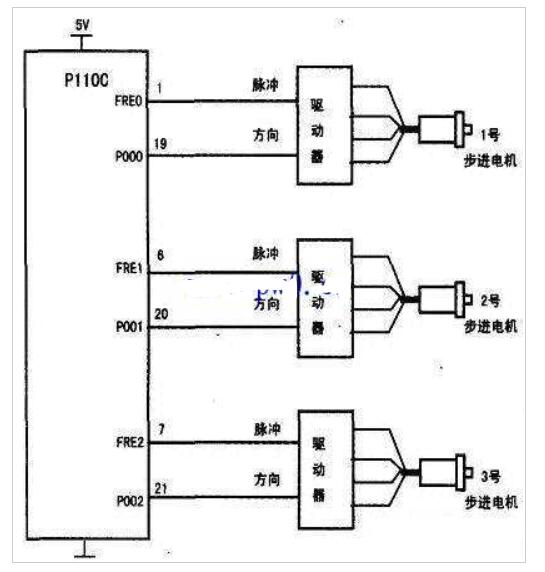
步進電機又稱為脈沖電機,基于最基本的電磁鐵原理,它是一種可以自由回轉(zhuǎn)的電磁鐵,其動作原理是依靠氣隙磁導的變化來產(chǎn)生電磁轉(zhuǎn)矩,步進電機的角位移量與輸入的脈沖個數(shù)嚴格成正比,而且在時間上與脈沖同步,因而只要控制脈沖的數(shù)量、頻率和電機繞組的相序,即可獲得所需的轉(zhuǎn)角、速度和方向。
2021-01-20 12:52:417 下圖顯示了步進電機的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2021-06-13 17:46:324193 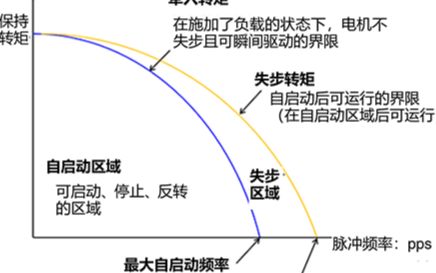
做好閉環(huán)步進電機速度控制,是保證電機有好的控制,能夠能夠呈現(xiàn)出好的運行效果發(fā)揮出優(yōu)勢功能的重點之一。所謂的控制電機運行速度,實際上就是控制系統(tǒng)發(fā)出步進脈沖的頻率或者換相的周期。該系統(tǒng)可用兩種辦法來確定步進脈沖的周期。
2021-08-14 10:02:251456 精確定位的目的。同時您可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和角速度,從而達到調(diào)速的目的。24BYJ48型四相八拍步進電機。電壓為5V-12V。當步進電機是在一系列連續(xù)不斷的控制脈沖時,它可以連續(xù)不...
2021-10-28 15:51:1212 1.步進電機圖片2.步進電機介紹步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,即給電機
2021-11-13 15:06:0510 的步進角,給一個脈沖,它就轉(zhuǎn)動一個步進角,于是它取名:步進電機第二個問題:步進電機的特性?在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當步進驅(qū)動器接收...
2021-11-20 10:51:0520 中調(diào)用說明主函數(shù)代碼如下:定時器中代碼如下:實物圖步進電機特點:它是通過輸入脈沖信號來進行控制的電機的總轉(zhuǎn)動角度由輸入脈沖數(shù)決定電機的轉(zhuǎn)速由脈沖信號頻率決定步進電機主要用于一些有定位要求、進行精確控制的場合。特別適合要求運行平穩(wěn)、低
2021-11-25 10:21:0634 步進電機是將電脈沖信號變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載情況下,電機的轉(zhuǎn)速,停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉(zhuǎn)過一個步距角。這一
2021-12-27 19:29:239 1 步進電機原理1.1 步進電機簡介步進電機是將輸入的電脈沖信號轉(zhuǎn)換為角位移或線位移的元件。在不超負載運作的情況下,電機的轉(zhuǎn)速以及停止的位置只取決于脈沖的個數(shù)和脈沖的頻率。脈沖數(shù)越多,電機的角位移
2022-01-17 10:32:256 ,小編就借這篇文章給大家講述一下步進電機是什么以及怎么解決步進電機不轉(zhuǎn)的問題。 步進電機是一種能夠把電脈沖信號轉(zhuǎn)換為相應的角位移或者線位移的電動機,每次輸入一個脈沖信號都會使轉(zhuǎn)子轉(zhuǎn)動一個角度或者前進一步,因此
2022-04-14 10:51:3515672 步進電機的旋轉(zhuǎn)是以固定的角度一步一步運行的,可以通過控制脈沖個數(shù)來控制角位移量,從而達到準確定位的目的,同時可以通過控制脈沖頻率,來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。步進電機多用于數(shù)字式計算機的外部設(shè)備,以及打印機、繪圖機和磁盤等裝。
2022-09-05 15:24:286981 步進電機是將電脈沖信號,轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響。步進電機的旋轉(zhuǎn)是以固定的角度一步一步運行
2022-10-09 09:34:081071 步進電機是一種直接將電脈沖轉(zhuǎn)化為機械運動的機電裝置, 通過控制施加在電機線圈上的電脈沖順序、 頻率和數(shù)量, 可以實現(xiàn)對步進電機的轉(zhuǎn)向、 速度和旋轉(zhuǎn)角度的控制。
2022-12-07 10:43:104916 本文將介紹步進電機的基本特性。步進電機的基本特性:下圖顯示了步進電機的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:101168 
步進電機的頻率特性主要指其轉(zhuǎn)速與輸入脈沖信號頻率之間的關(guān)系。由于步進電機的運動是由輸入脈沖信號控制的,因此輸入脈沖信號的頻率會直接影響步進電機的轉(zhuǎn)速和運動精度。
2023-03-08 14:24:331240 步進電機和伺服電機是兩種常見的電機類型,它們的應用場景和控制方式不同,下面是它們的區(qū)別和選型方法:
步進電機是一種開環(huán)控制電機,控制信號為脈沖信號,通過控制脈沖數(shù)量和頻率來控制電機的位置和運動。步進電機具有簡單的控制方式、低成本和較高的精度,但通常不能提供高速運動和高負載扭矩。
2023-03-08 14:40:451257 步進電機的旋轉(zhuǎn)速度可以通過控制脈沖信號的頻率和電機驅(qū)動方式來實現(xiàn)。
脈沖頻率控制:步進電機的旋轉(zhuǎn)速度與脈沖信號的頻率成正比,因此可以通過調(diào)整脈沖信號的頻率來控制電機的旋轉(zhuǎn)速度。一般來說
2023-03-08 17:03:123337 步進電機是一種可以與脈沖信號同步準確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機,步進電機的也稱為“脈沖電機”。由于步進電機無需使用位置傳感器僅通過開環(huán)控制即可實現(xiàn)準確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321227 
前面學習了1200高速脈沖輸出功能的應用,那1500如何輸出高速脈沖控制步進電機呢?
2023-03-10 09:44:326582 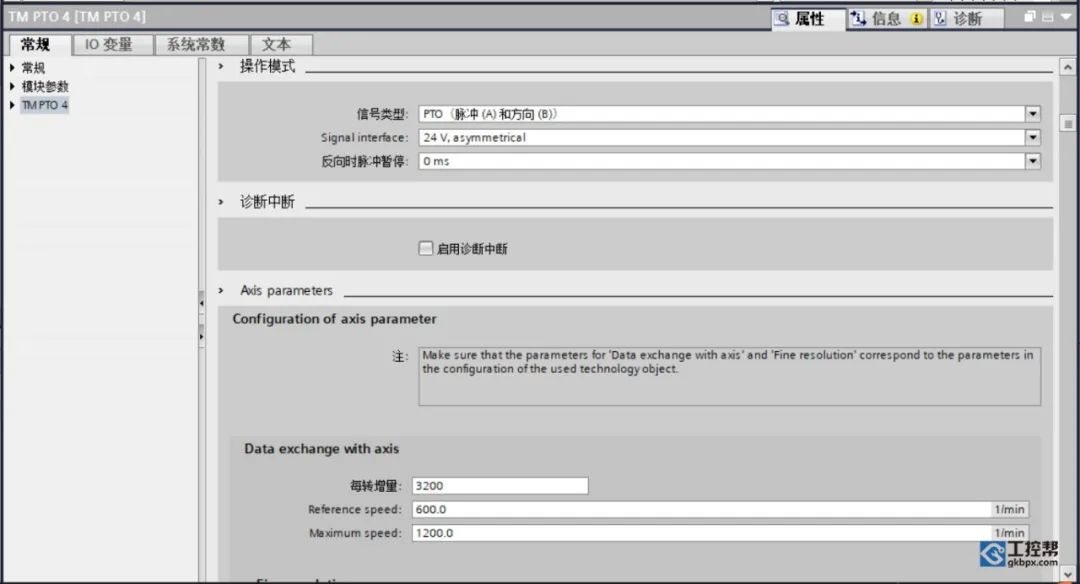
步進電機每輸入一個脈沖信號,轉(zhuǎn)子就轉(zhuǎn)動一個角度或前進一步,其輸出的角度輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。它的驅(qū)動方式也比普通的有刷直流電機復雜。 本節(jié)我們就來講講步進電機最基礎(chǔ)的驅(qū)動方式
2023-03-16 09:28:426 ------一個固定的角度(及步進角)。可以通過控制脈沖個來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和
加速度,從而達到調(diào)速的目的。
2023-03-16 10:29:3611 步進電機的驅(qū)動方式可以描述為:
1、步進電機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。
2、當步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度(及步進角)。
3、通過
2023-03-16 14:04:533 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖
信號的頻率和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉(zhuǎn)過
2023-03-16 09:42:590 步進驅(qū)動系統(tǒng)包含步進電動機和步進驅(qū)動器。
脈沖量信號和電平形式的開關(guān)量類似,當開關(guān)量按一定頻率變化時,則該開關(guān)量就可以視為脈沖量,即脈沖量具有周期性。
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移
2023-03-17 15:17:310 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的
影響,即給電機一個脈沖信號,電機則轉(zhuǎn)過
2023-03-21 14:17:360 簡介 步進電機是一種將**電脈沖信號**轉(zhuǎn)換成**相應角位移或線位移**的電動機。每輸入一個脈沖信號,轉(zhuǎn)子就轉(zhuǎn)動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比
2023-03-21 13:50:390 什么是步進電機 步進電機是一種將電脈沖信號轉(zhuǎn)換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉(zhuǎn)子就轉(zhuǎn)動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速和角加速度與脈沖頻率
2023-03-21 13:54:460 步進電機是將電脈沖信號,轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,又稱為脈沖電機。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不
受負載變化的影響。當步進驅(qū)動器接收到一個脈沖信號時,它就可以驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度,稱為“步距角”。
2023-03-21 15:20:551 在不超載的情況下電機的轉(zhuǎn)速和停止位置只取決于脈沖信號的頻率和數(shù)量;并且步進電機的脈沖與步進旋轉(zhuǎn)的角度成正比,脈 沖的頻率與步進的轉(zhuǎn)速成正比。
通過改變定子的電流比例,改變轉(zhuǎn)子在一個整步中的不同位
2023-03-21 14:28:070 一個步距角。
特點 1)當步進電機接收到一定順序的脈沖時,它就會根據(jù)脈沖的控制時序進行順時針和逆時針的轉(zhuǎn)動, 脈沖的順序決定了步進電機旋轉(zhuǎn)的方向,脈沖的個數(shù)決定了步進電機轉(zhuǎn)動的角度,脈沖的頻率決定了步進電機的轉(zhuǎn)速; 2)有脈沖
2023-03-21 11:01:202 為什么要使用加減速呢?硬件驅(qū)動細分器與軟件的細分參數(shù)或定時器分頻參數(shù)設(shè)置不當時啟動電機時,會遇見步進電機有嘯叫聲但是不會轉(zhuǎn)動,這
是因為軟件產(chǎn)生脈沖的頻率大于步進電機的啟動頻率,步進電機有一個很重
2023-03-21 10:51:510 步進電機步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。
步進電機收到一個脈沖,步進電機走一個步距角。
在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號的頻率和脈沖
2023-03-22 10:42:590 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),
當步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度
2023-03-22 11:32:550 現(xiàn)象:步進電機轉(zhuǎn)速慢的情況下會產(chǎn)生震動
原因:本身的兩個特性:矩頻特性、低頻特性
(1) 矩頻特性: 研控57步進電機 啟動時脈沖頻率過高,電機輸出扭矩較小,負載較重時可能會丟步,從而產(chǎn)生震動
2023-03-22 10:04:340 步進電機**是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進電機件,在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖個數(shù),而不受負載變化的影響,當步進驅(qū)動器接收到一個脈沖信號
2023-03-22 11:34:06711 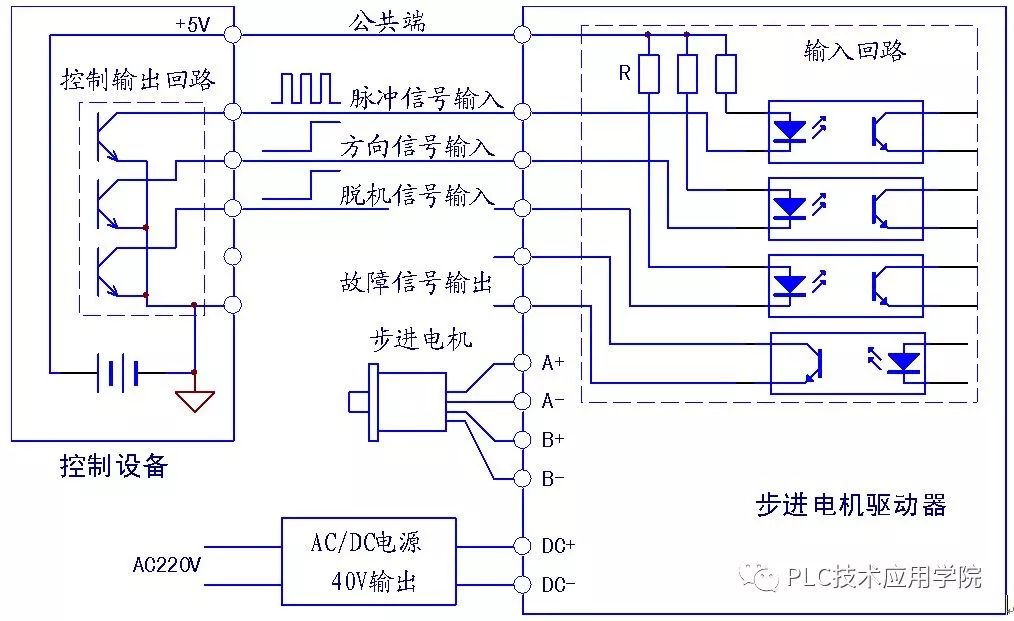
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進電機件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取
決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當步進驅(qū)動器接收到一個脈沖信號
2023-03-23 11:45:104 步進電機基礎(chǔ)(3.2)-步進電機的原理與特性之基本特性 前言 基本信息 公式 前言說明 基本特性 1. 靜態(tài)轉(zhuǎn)矩特性 2. 動態(tài)轉(zhuǎn)矩特性 1) 脈沖頻率-轉(zhuǎn)矩特性 2) 脈沖頻率-慣量特性3. 暫態(tài)
2023-03-23 13:51:012 在成功啟動步進電機之后,可通過運行數(shù)個脈沖后停止定時器做到控制步進電機轉(zhuǎn)動特定角度,實現(xiàn)脈沖定位。
步進電機是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu),也就是當步進驅(qū)動器接收到一個脈沖信號后,就會驅(qū)動電機
2023-03-23 11:36:529 步進頻率脈沖信號包括若干個脈沖,每個脈沖的工作頻率是在中心頻率基礎(chǔ)上以均勻步進,且每個子脈沖可以是單載頻脈沖,也可以是頻率調(diào)制脈沖。
2023-04-19 15:46:442358 
脈沖信號的頻率和脈沖個數(shù),而不受負載變化的影響,當步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機安設(shè)定的方向轉(zhuǎn)動一個固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運行的。可以通過控制脈沖
2023-05-04 15:32:06895 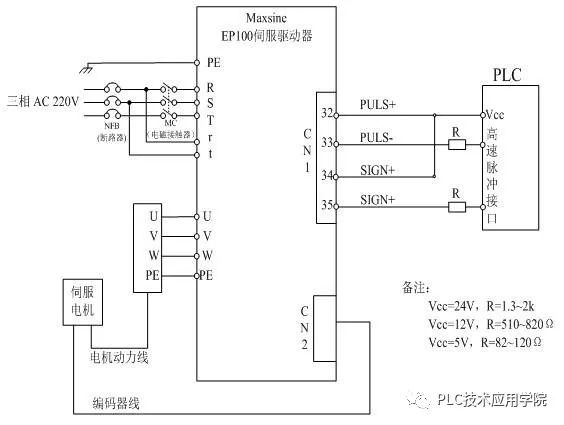
步進電機控制器是一種能夠發(fā)出均勻脈沖信號的電子產(chǎn)品,它發(fā)出的信號進入步進電機驅(qū)動器后,會由驅(qū)動器轉(zhuǎn)換成步進電機
所需要的強電流信號,帶動步進電機運轉(zhuǎn)。步進電機控制器能夠準確的控制步進電機轉(zhuǎn)過每一個
2023-05-05 14:16:034 步進電機按照設(shè)定的方向轉(zhuǎn)動一定的角度。步進電機只受脈沖數(shù)量和脈沖頻率的控制,我們可以通過控制脈沖數(shù)量來控制角位移數(shù)量,也可以通過設(shè)置脈沖頻率控制電機的轉(zhuǎn)動速速,達到
2022-10-24 11:28:171479 
逆變電路的頻率由什么決定 逆變電路的頻率是由兩個主要因素決定的,電路中所使用的元器件及其參數(shù)、以及控制元件(例如晶體管或場效應管)的開關(guān)速度。 在逆變電路中,最為重要的元器件是電感和電容,因為它們
2023-10-16 15:57:10889 步進電機的運行要有一電子裝置進行驅(qū)動,這種裝置就是步進電機驅(qū)動器,它是把控制系統(tǒng)發(fā)出的脈沖信號,加以放大以驅(qū)動步進電機。步進電機的轉(zhuǎn)速與脈沖信號的頻率成正比,控制步進電機脈沖信號的頻率,可以對電機精確調(diào)速;控制步進脈沖的個數(shù),可以對電機精確定位。
2023-10-19 10:59:42262 
步進電機 步進電機是一種將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應用極為廣泛。在非超載的情況下,步進電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖
2023-11-16 16:08:53370 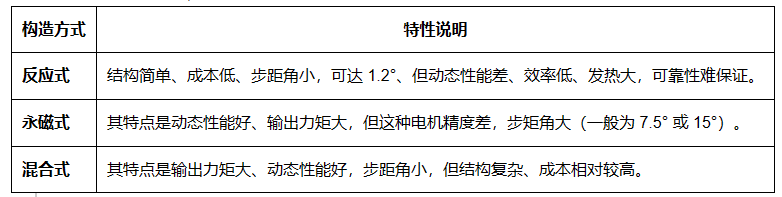
組成。 步進電機的工作原理是利用電磁場相互作用產(chǎn)生的力矩來驅(qū)動轉(zhuǎn)子旋轉(zhuǎn)。步進電機的旋轉(zhuǎn)角度取決于電流的脈沖數(shù)量和頻率。在給定的時間間隔內(nèi),電機接收到特定的脈沖,該脈沖會使電機旋轉(zhuǎn)一個小的角度,稱為步進角。 步進電機
2024-01-18 11:02:45698 斬波電路的開關(guān)頻率由什么決定? 斬波電路的開關(guān)頻率是指電路中開關(guān)元件(一般是晶體管或MOSFET)的開關(guān)動作頻率。這個頻率是由多個因素決定的,包括電路設(shè)計的目標、開關(guān)元件的參數(shù)、電路的工作條件
2024-01-31 16:43:18219
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論