Motionchip是一種性能優(yōu)異的專用運(yùn)動(dòng)控制芯片,擴(kuò)展容易,使用方便。本文基于該芯片設(shè)計(jì)了一款可用于直流有刷/無(wú)刷伺服電機(jī)的智能伺服驅(qū)動(dòng)器,并將該驅(qū)動(dòng)器運(yùn)用到加氫反應(yīng)器超聲檢測(cè)成像系統(tǒng)中,上位
2014-05-19 10:38:20 3753
3753 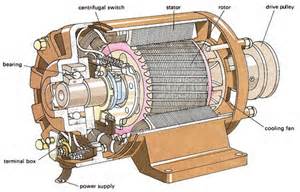
數(shù)字運(yùn)動(dòng)控制方法可在機(jī)器人系統(tǒng)中精確調(diào)節(jié)電動(dòng)機(jī)和執(zhí)行器驅(qū)動(dòng)末端執(zhí)行器的運(yùn)動(dòng)和定位。然而,在實(shí)踐中,開(kāi)發(fā)基于傳統(tǒng)比例積分(PI)控制器的運(yùn)動(dòng)控制系統(tǒng)的工程師通常會(huì)發(fā)現(xiàn)他們的項(xiàng)目因?yàn)殡y以調(diào)整敏感的控制器參數(shù)而停滯不前。更有效的方法可降低調(diào)諧復(fù)雜度,同時(shí)在各種工作條件下提供穩(wěn)定的性能。
2019-02-25 08:57:004749 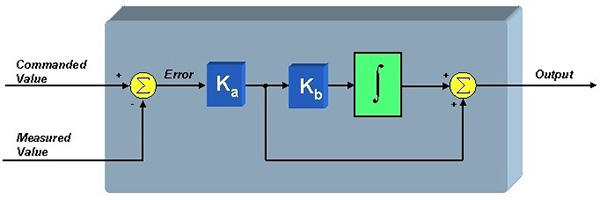
,數(shù)控機(jī)床。大規(guī)模集成電路制造設(shè)備、雷達(dá)和各種軍用武器隨動(dòng)系統(tǒng),以及柔性制造系統(tǒng)(FMS)等。而運(yùn)動(dòng)控制系統(tǒng)的組成主要由五部分構(gòu)成:被移動(dòng)的機(jī)械設(shè)備、帶反饋和運(yùn)動(dòng)I/O的馬達(dá)(伺服或步進(jìn))、馬達(dá)驅(qū)動(dòng)單元、運(yùn)動(dòng)控制模塊、以及編程/操作接口軟件(見(jiàn)圖1)所示。其運(yùn)動(dòng)控制芯片或模塊是作為伺服與步進(jìn)控制用。
2020-06-26 09:27:002058 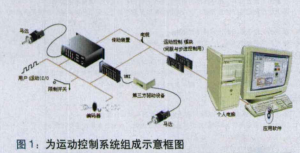
RD-407,參考設(shè)計(jì)使用FNB50560Tx,5A / 600V,0.7 kW,三相IGBT逆變器,用于運(yùn)動(dòng)控制應(yīng)用。以下參考設(shè)計(jì)支持在應(yīng)用運(yùn)動(dòng)控制設(shè)計(jì)中包含F(xiàn)Nx5xx60Tx
2020-04-30 09:36:09
具有高達(dá)800 MMAC的性能,集成5 MB片 內(nèi)存儲(chǔ)器、FFT/FIR/IIR加速器以及眾多外部存儲(chǔ)器接口與外設(shè),使這些處理器適用于運(yùn)動(dòng)控制器、高端電機(jī)驅(qū)動(dòng)和伺服器系統(tǒng)。 未完待續(xù)!相關(guān)文章:【A
2018-10-25 10:17:17
進(jìn)行運(yùn)動(dòng)。一個(gè)運(yùn)動(dòng)控制系統(tǒng)的基本架構(gòu)組成包括:一個(gè)運(yùn)動(dòng)控制器用以生成軌跡點(diǎn)(期望輸出)和閉合位置反饋環(huán)。許多控制器也可以在內(nèi)部閉合一個(gè)速度環(huán)。一個(gè)驅(qū)動(dòng)或放大器用以將來(lái)自運(yùn)動(dòng)控制器的控制信號(hào)(通常是速度或
2016-05-07 19:22:19
本人對(duì)運(yùn)動(dòng)控制卡一無(wú)所知,想問(wèn)一下運(yùn)動(dòng)控制是不是也像數(shù)據(jù)采集卡一樣有多組通道呢,一塊運(yùn)動(dòng)控制卡能不能實(shí)現(xiàn)同時(shí)控制幾個(gè)電機(jī)做相同的運(yùn)動(dòng)呢?
2013-06-05 00:45:32
運(yùn)動(dòng)控制卡是什么?運(yùn)動(dòng)控制卡有何功能?伺服驅(qū)動(dòng)器是什么?伺服驅(qū)動(dòng)器有哪幾種控制方式?
2021-10-09 08:17:42
完整的控制系統(tǒng)是什么樣的?控制器的作用是什么?上位機(jī)做什么?單片機(jī)可以做什么?運(yùn)動(dòng)控制和電機(jī)控制的區(qū)別是什么?
2021-10-28 06:34:31
運(yùn)動(dòng)控制主要涉及步進(jìn)電機(jī)、伺服電機(jī)的控制,控制結(jié)構(gòu)模式一般是:控制裝置+驅(qū)動(dòng)器+(步進(jìn)或伺服)電機(jī)。控制裝置可以是PLC系統(tǒng),也可以是專用的自動(dòng)化裝置(如運(yùn)動(dòng)控制器、運(yùn)動(dòng)控制卡)。PLC系統(tǒng)作為控制
2022-03-03 15:43:50
254 個(gè))控制器和PC/觸摸屏組成控制網(wǎng)絡(luò);也可應(yīng)用于需要獨(dú)立運(yùn)行的場(chǎng)合。? DMC600M 系列運(yùn)動(dòng)控制器,其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及加減
2019-09-12 11:36:00
及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。本文深刻探討了運(yùn)動(dòng)控制器是如何進(jìn)行設(shè)計(jì)的?
2019-07-31 08:15:26
運(yùn)動(dòng)控制器是運(yùn)動(dòng)控制系統(tǒng)的核心部件。目前,國(guó)內(nèi)的運(yùn)動(dòng)控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動(dòng)控制器。這類運(yùn)動(dòng)控制器速度較慢、精度不高、成本相對(duì)較低,只能在一些低速運(yùn)行和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。
2019-10-16 06:22:14
》、《機(jī)電一體化系統(tǒng)》、《運(yùn)動(dòng)控制》等課程的配套實(shí)驗(yàn)教學(xué)模型。ZN-YD運(yùn)動(dòng)控制實(shí)驗(yàn)裝置是一個(gè)將速度控制技術(shù)、位置控制技術(shù)、位置檢測(cè)技術(shù)等有機(jī)結(jié)合的教學(xué)實(shí)驗(yàn)系統(tǒng)。它由運(yùn)動(dòng)控制器、伺服電機(jī)及伺服驅(qū)動(dòng)器、滾珠絲桿等組成。二、技術(shù)性能1、輸入電壓:?jiǎn)蜗嗳€制 ~220V±10%50Hz2、工作環(huán)境:溫度范圍
2021-07-01 09:34:35
運(yùn)動(dòng)控制系統(tǒng)
2013-08-15 09:37:04
運(yùn)動(dòng)控制系統(tǒng)由什么組成?
2021-11-01 06:33:31
目錄前言運(yùn)動(dòng)控制系統(tǒng)的基本方程前言本篇文章主要參考資料為:電力拖動(dòng)自動(dòng)控制系統(tǒng)——運(yùn)動(dòng)控制系統(tǒng)(第五版) 阮毅 楊影 陳伯時(shí)工業(yè)運(yùn)動(dòng)控制——電機(jī)選擇,驅(qū)動(dòng)器和控制器應(yīng)用 Hakan Gurocak
2021-09-15 07:57:19
1.運(yùn)動(dòng)控制系統(tǒng)組成1)人機(jī)接口2)運(yùn)動(dòng)控制器3)驅(qū)動(dòng)器4)執(zhí)行器5)傳動(dòng)機(jī)構(gòu)6)反饋2.運(yùn)動(dòng)曲線1)梯形速度曲線梯形曲線比較簡(jiǎn)單,但是梯形尖角會(huì)導(dǎo)致加速度不連續(xù),對(duì)系統(tǒng)產(chǎn)生極大的沖擊。2)S型速度
2021-09-01 07:52:50
用于雙電池系統(tǒng)的PowerPath控制器
2023-03-23 04:53:45
關(guān)于運(yùn)動(dòng)控制,可以選用NI的硬件和硬件驅(qū)動(dòng),開(kāi)發(fā)時(shí)間比較短,但是成本較高。另外運(yùn)動(dòng)控制還可以使用PLC和運(yùn)動(dòng)控制卡,我現(xiàn)在使用的是PCI的運(yùn)動(dòng)控制卡,市場(chǎng)上很多,大多數(shù)會(huì)提供驅(qū)動(dòng),支持VC、VB等等
2015-02-10 11:30:19
PCL6143運(yùn)動(dòng)控制器的原理及應(yīng)用 可以用于設(shè)計(jì)開(kāi)發(fā)相應(yīng)的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計(jì)了一款基于PC104總線的四軸運(yùn)動(dòng)控制卡, 介紹了如何編寫運(yùn)動(dòng)控制卡的功能函數(shù)庫(kù)。
2023-09-26 08:14:08
什么是運(yùn)動(dòng)控制卡?運(yùn)動(dòng)控制卡與驅(qū)動(dòng)器有什么不同?PLC控制好還是運(yùn)動(dòng)控制卡控制好?
2021-10-09 07:56:29
基于labview的運(yùn)動(dòng)控制系統(tǒng)
2013-04-05 20:18:35
全球領(lǐng)先的電機(jī)及運(yùn)動(dòng)控制開(kāi)發(fā)商TRINAMIC近日發(fā)布了一款業(yè)內(nèi)最低成本的單軸運(yùn)動(dòng)控制芯片,該全新的TMC4210運(yùn)動(dòng)控制芯片可完成步進(jìn)電機(jī)的所有實(shí)時(shí)定位和速度計(jì)算,簡(jiǎn)化了電機(jī)控制系統(tǒng)中的主單片機(jī)
2013-09-03 17:08:01
各位大俠,求助呀~運(yùn)動(dòng)控制卡采用的是ni公司PCI-7350,用labview編寫運(yùn)動(dòng)控制系統(tǒng)。以前沒(méi)有編寫過(guò)大型的系統(tǒng),沒(méi)什么經(jīng)驗(yàn),大俠們有沒(méi)有相關(guān)的資料,特別是編寫的相關(guān)的例子。單軸,雙軸,三軸的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
0. 介紹下圖展示了一個(gè)基于Platinum Maestro的運(yùn)動(dòng)控制系統(tǒng)的軟件結(jié)構(gòu)。Note:另外兩個(gè)軟件模塊,不包括在上面的圖表中,與白金大師一起使用。這些是KPA Studio和用于TCP
2021-09-14 09:04:01
專用機(jī)器中的應(yīng)用更復(fù)雜,因?yàn)楹笳?b class="flag-6" style="color: red">運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱為通用運(yùn)動(dòng)控制(GMC)。運(yùn)動(dòng)控制器的工作原理及應(yīng)用傳統(tǒng)的數(shù)控機(jī)床的控制方式主要有繼電器控制、單片機(jī)控制與PLC控制幾類。現(xiàn)階段數(shù)控系統(tǒng)逐漸向
2021-08-02 10:04:58
文章目錄第1章 緒論第2章 運(yùn)動(dòng)曲線2.0 引言2.1 運(yùn)動(dòng)學(xué)的基本概念2.2 常見(jiàn)運(yùn)動(dòng)曲線2.2.1 梯形速度曲線2.2.2 S 形速度曲線第3章 傳動(dòng)鏈設(shè)計(jì)第1章 緒論什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)
2021-09-01 07:06:21
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動(dòng)控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動(dòng)器 ?
2021-06-28 08:03:17
可以同時(shí)適應(yīng)商業(yè)和工業(yè)應(yīng)用。
2. 確定性適用于運(yùn)動(dòng)控制應(yīng)用
運(yùn)動(dòng)控制依賴于精確通信。這種精確性通過(guò)使用基于時(shí)隙的調(diào)度來(lái)支持,每個(gè)設(shè)備在調(diào)度策略中都有一個(gè)與其它設(shè)備進(jìn)行通信的調(diào)度表。這些伺服驅(qū)動(dòng)
2018-10-24 09:45:48
和工業(yè)應(yīng)用。2. 確定性適用于運(yùn)動(dòng)控制應(yīng)用運(yùn)動(dòng)控制依賴于精確通信。這種精確性通過(guò)使用基于時(shí)隙的調(diào)度來(lái)支持,每個(gè)設(shè)備在調(diào)度策略中都有一個(gè)與其它設(shè)備進(jìn)行通信的調(diào)度表。這些伺服驅(qū)動(dòng)器和控制器計(jì)算出它們各自
2018-10-11 17:45:35
你知道為什么是以太網(wǎng)用于運(yùn)動(dòng)控制嗎?以太網(wǎng)為什么會(huì)被接受?以太網(wǎng)在工業(yè)應(yīng)用中有何作用?
2021-06-16 08:27:33
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來(lái),工業(yè)控制對(duì)運(yùn)動(dòng)控制系統(tǒng)的要求越來(lái)越高,為了滿足新一代運(yùn)動(dòng)控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動(dòng)控制器應(yīng)運(yùn)而生。而基于ARM運(yùn)動(dòng)控制芯片的新一代運(yùn)動(dòng)
2019-10-11 06:30:55
使用基于PC的控制軟件、EtherCAT網(wǎng)絡(luò)、集成驅(qū)動(dòng)器和單電纜技術(shù)進(jìn)行配置,可簡(jiǎn)化運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),并降低伺服電機(jī)成本。 無(wú)論是改造項(xiàng)目還是新應(yīng)用,選擇和安裝最佳伺服電機(jī),都不是一項(xiàng)簡(jiǎn)單
2023-03-03 16:04:20
本帖最后由 eehome 于 2013-1-5 10:06 編輯
六軸運(yùn)動(dòng)控制卡是基于PCI總線的高性能六軸伺服/步進(jìn)控制卡,一個(gè)系統(tǒng)中可支持多達(dá)16塊控制卡,可控制96路伺服/步進(jìn)電機(jī),支持
2012-12-24 15:25:13
需要做一個(gè)基于labview 加運(yùn)動(dòng)控制卡的伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng),請(qǐng)問(wèn)PCI-7831R 這塊板是運(yùn)動(dòng)控制卡嗎,可不可以用來(lái)做,百度了是什么多功能RIO,新手,不太懂求指教
2015-12-09 18:15:35
、地址總線與數(shù)據(jù)總線,與微處理器uC連接,用于接收微處理器控制指令。其中外部接口OUTx、DIRx是每個(gè)運(yùn)動(dòng)軸的脈沖PU和方向DIR輸出,接電機(jī)驅(qū)動(dòng)器,然后電機(jī)驅(qū)動(dòng)器接到電機(jī)上即可,電機(jī)帶動(dòng)運(yùn)動(dòng)結(jié)構(gòu)可以
2020-04-15 14:35:51
通用型運(yùn)動(dòng)控制器。其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。本文對(duì)該運(yùn)動(dòng)
2009-09-19 09:43:00
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
各位大神們,請(qǐng)問(wèn)要想驅(qū)動(dòng)運(yùn)動(dòng)控制卡,我需要在LabVIEW程序框圖中如何編寫這樣的程序,請(qǐng)各位能夠幫幫我!!!
2016-05-30 09:00:41
如何實(shí)現(xiàn)基于STM32F103懸掛運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)?
2021-12-23 06:47:52
,所以想搭建一個(gè)簡(jiǎn)單用于學(xué)習(xí)運(yùn)動(dòng)控制的平臺(tái)。我目前僅僅知道,需要運(yùn)動(dòng)控制卡+電機(jī)及其驅(qū)動(dòng)器,其它的就不知道還需要什么硬件了。對(duì)于其品牌,也都不熟悉。我想要一個(gè)4軸運(yùn)動(dòng)控制卡,最好是網(wǎng)口的,然后有個(gè)2套電機(jī)
2022-05-23 15:49:20
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線型,CAN總線型等,通過(guò)編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-07-08 09:59:14
運(yùn)動(dòng)控制系統(tǒng)被廣泛地運(yùn)用于各個(gè)領(lǐng)域。傳統(tǒng)的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)有基于PC的中央控制方式和基于微控制器的嵌入式控制方式等。
2019-08-28 07:00:52
在現(xiàn)代的工業(yè)控制、車輛運(yùn)動(dòng)和醫(yī)療設(shè)備等系統(tǒng)中,懸掛運(yùn)動(dòng)系統(tǒng)的應(yīng)用越來(lái)越多,在這些系統(tǒng)中懸掛運(yùn)動(dòng)部件通常是具體的執(zhí)行機(jī)構(gòu),因而懸掛部件的運(yùn)動(dòng)精確性是整個(gè)系統(tǒng)工作效能的決定因素,而在實(shí)際中實(shí)現(xiàn)懸掛運(yùn)動(dòng)
2019-08-12 08:21:38
本文采用Verilog FPGA設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)的控制器,通過(guò)輸入模塊傳送控制參數(shù),采用HDL語(yǔ)言編程實(shí)現(xiàn)的控制算法,驅(qū)動(dòng)步進(jìn)電機(jī),對(duì)懸掛運(yùn)動(dòng)物體進(jìn)行精確的控制。
2021-05-06 07:11:03
怎樣去搭建一個(gè)基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)?基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)應(yīng)具備哪些功能?
2021-08-24 06:27:47
模型電動(dòng)汽車系統(tǒng)是怎樣構(gòu)成的?怎樣去設(shè)計(jì)一種雙后輪驅(qū)動(dòng)電動(dòng)汽車運(yùn)動(dòng)控制系統(tǒng)?
2021-05-13 06:19:27
多種電機(jī)驅(qū)動(dòng):脈沖電機(jī),變頻電機(jī),安川電機(jī)■多達(dá)3個(gè)網(wǎng)口,支持ETHERCAT工業(yè)總線設(shè)備■ECNC運(yùn)動(dòng)控制SDK軟件包,輕松實(shí)現(xiàn)工業(yè)控制所需功能■可用于機(jī)器視覺(jué)處理,加工中心,精雕機(jī)器,機(jī)器人系統(tǒng)等工業(yè)應(yīng)用領(lǐng)域P...
2021-09-07 07:26:54
想問(wèn)下各位大神怎么做基于labview的PMAC多軸運(yùn)動(dòng)控制卡的驅(qū)動(dòng),或者發(fā)送指令的格式??
2016-01-13 10:05:41
CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測(cè)處理。DMC600M系列3~6軸運(yùn)動(dòng)控制系統(tǒng)
2022-02-26 16:26:24
設(shè)計(jì)是完成一兩坐標(biāo)步進(jìn)電機(jī)驅(qū)動(dòng)運(yùn)動(dòng)工作臺(tái)控制系統(tǒng)的設(shè)計(jì);完成交流電機(jī)啟停的電氣控制系統(tǒng)設(shè)計(jì)。其硬件部分共包括鍵盤操作、單片機(jī)控制、輸入電路、控制電路、顯示電
2009-04-11 18:19:39 7
7 本文是在基于ARM+FPGA 的硬件平臺(tái)上進(jìn)行嵌入式運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì),ARM實(shí)現(xiàn)應(yīng)用管理,F(xiàn)PGA 實(shí)現(xiàn)插補(bǔ)運(yùn)算,發(fā)出脈沖到伺服驅(qū)動(dòng)系統(tǒng),形成運(yùn)動(dòng)指令控制伺服電機(jī)運(yùn) 轉(zhuǎn)等。文
2009-06-01 15:09:2727 介紹了一個(gè)用于水下運(yùn)動(dòng)目標(biāo)軌跡測(cè)量系統(tǒng)的機(jī)電伺服系統(tǒng)。該系統(tǒng)由兩部分構(gòu)成:機(jī)械裝置與控制單元。該伺服系統(tǒng)使測(cè)量系統(tǒng)能夠在水平平面或垂直平面上轉(zhuǎn)動(dòng),從而擴(kuò)大測(cè)量
2009-06-22 14:48:1211 本文討論了基于嵌入式同步運(yùn)動(dòng)控制器應(yīng)用于飛剪系統(tǒng)的體系結(jié)構(gòu)。通過(guò)對(duì)其深入研究,開(kāi)發(fā)出相應(yīng)的飛剪系統(tǒng)控制軟件,給出了運(yùn)動(dòng)控制軟件的基本功能模型。實(shí)現(xiàn)了嵌入式
2009-07-02 14:39:4124 文中介紹了一種應(yīng)用于舞臺(tái)電腦燈控制系統(tǒng)的高性能步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng),以及步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)原理和自適應(yīng)調(diào)速算法。使用細(xì)分驅(qū)動(dòng)可以顯著地減小步進(jìn)電機(jī)的低頻振動(dòng)
2009-08-13 09:11:0019 用于LED應(yīng)用系統(tǒng)的供電和驅(qū)動(dòng)摘要:本參考設(shè)計(jì)是汽車LED應(yīng)用的完整系統(tǒng)設(shè)計(jì)。采用MAX15005電流模式控制器,將標(biāo)準(zhǔn)鉛酸汽車電池的電壓升至21V,用于驅(qū)動(dòng)一串汽車LED。 下列提供
2009-10-06 12:15:0920 本文給出了一種使用 DriverStudio 設(shè)計(jì)WDM 驅(qū)動(dòng)程序的方法,用以實(shí)現(xiàn)數(shù)控系統(tǒng)應(yīng)用程序?qū)?b class="flag-6" style="color: red">運(yùn)動(dòng)控制卡的訪問(wèn)。文中以基于PCI 總線的運(yùn)動(dòng)控制卡為對(duì)象,在構(gòu)架其硬件結(jié)構(gòu)的基礎(chǔ)上
2009-10-12 18:28:3639 設(shè)計(jì)了自動(dòng)導(dǎo)航車(AGV)的驅(qū)動(dòng)模塊,建立了三輪式AGV 的運(yùn)動(dòng)學(xué)模型,獲得了運(yùn)動(dòng)控制規(guī)律。以直線和“8”字形為參考軌跡,進(jìn)行仿真跟蹤。仿真結(jié)果驗(yàn)證了控制策略的有效性和正
2009-12-18 11:55:046 本文介紹了一個(gè)基于多軸運(yùn)動(dòng)控制卡的運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)以工控計(jì)算機(jī)、通用操作系統(tǒng)、PCI-8134多軸運(yùn)動(dòng)控制卡及其功能庫(kù)函數(shù)為平臺(tái),采用VC++開(kāi)發(fā)的人機(jī)界面,實(shí)現(xiàn)了三軸(X,Y,Z軸
2010-02-11 14:20:3855 提出了一種基于多軸運(yùn)動(dòng)控制器的轉(zhuǎn)臺(tái)控制系統(tǒng)的組成方案.給出了轉(zhuǎn)臺(tái)的基本組成, 介紹了多軸運(yùn)動(dòng)控制卡功能及其硬軟件的開(kāi)放性。分析了控制系統(tǒng)的組成原理,詳細(xì)介紹了控制
2010-09-23 11:58:3125 運(yùn)動(dòng)控制系統(tǒng)課件,對(duì)于運(yùn)動(dòng)控制系統(tǒng)這門課程,里面的課件進(jìn)行一一解剖分析,只為讓你們更好地掌握這門課程
2016-06-15 15:53:570 在激光直寫運(yùn)動(dòng)控制系統(tǒng)中,為克服電機(jī)轉(zhuǎn)動(dòng)的負(fù)載擾動(dòng)、氣浮導(dǎo)軌的氣膜擾動(dòng)以及驅(qū)動(dòng)系統(tǒng)的機(jī)械共振等噪聲,實(shí)現(xiàn)載物工作臺(tái)的高精度定位,本文設(shè)計(jì)了基于雙NiosII軟核的數(shù)字伺服運(yùn)動(dòng)控制系統(tǒng)。
2017-09-08 15:09:0220 CPU S7-1200 兼具可編程邏輯控制器的功能和通過(guò)脈沖接口控制步進(jìn)電機(jī)和伺服電機(jī)運(yùn)行的運(yùn)動(dòng)控制功能。 運(yùn)動(dòng)控制功能負(fù)責(zé)對(duì)驅(qū)動(dòng)器進(jìn)行監(jiān)控。DC/DC/DC 型 CPU S7-1200 上配備有用于
2017-09-29 14:37:1842 DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
2017-10-19 14:58:4212 控制裝置可以是PLC系統(tǒng),也可以是專用的自動(dòng)化裝置(如運(yùn)動(dòng)控制器、運(yùn)動(dòng)控制卡)。也可以這樣理解:PLC的使用是一種普通的運(yùn)動(dòng)控制裝置。運(yùn)動(dòng)控制器是一種特殊的PLC,專職用于運(yùn)動(dòng)控制。
2017-10-19 17:41:1826995 運(yùn)動(dòng)控制系統(tǒng)的定義 運(yùn)動(dòng)控制系統(tǒng)(Motion Control System)也可稱作電力拖動(dòng)控制系統(tǒng)(Control Systems of Electric Drive) 運(yùn)動(dòng)控制系統(tǒng)--通過(guò)
2017-11-09 11:35:2414 臺(tái)達(dá)運(yùn)動(dòng)控制卡系統(tǒng)憑借高速穩(wěn)定的DMCNET運(yùn)動(dòng)控制協(xié)議、完善的硬件系列產(chǎn)品、豐富的軟件接口函數(shù),廣泛應(yīng)用于各種工業(yè)領(lǐng)域。臺(tái)達(dá)運(yùn)動(dòng)控制卡系統(tǒng),基于工控電腦的的特點(diǎn),可以方便與其他影像系統(tǒng)、數(shù)據(jù)庫(kù)系統(tǒng)、測(cè)試系統(tǒng)、遠(yuǎn)程監(jiān)控系統(tǒng)進(jìn)行整合。在IC芯片自動(dòng)燒錄領(lǐng)域,臺(tái)達(dá)運(yùn)動(dòng)控制卡系統(tǒng)的諸多特點(diǎn)得到完美發(fā)揮。
2019-05-01 11:41:003244 就運(yùn)動(dòng)控制而言,以太網(wǎng)、現(xiàn)場(chǎng)總線以及其他技術(shù)(如外圍組件互連)歷來(lái)都是相互競(jìng)爭(zhēng)的,用以在工業(yè)自動(dòng)化和控制系統(tǒng)中獲得對(duì)一些最苛刻要求的工作負(fù)載的處理權(quán)限。運(yùn)動(dòng)控制應(yīng)用要求確定性(保證網(wǎng)絡(luò)能夠及時(shí)將工作
2019-07-11 15:36:133822 Aerotech推出的XC2 PWM數(shù)字驅(qū)動(dòng)器是一款高性能小型單軸電機(jī)驅(qū)動(dòng)器,專為運(yùn)動(dòng)控制應(yīng)用而設(shè)計(jì)。它能與使用HyperWire?運(yùn)動(dòng)總線的Automation 3200運(yùn)動(dòng)平臺(tái)兼容。
2019-07-19 17:51:071248 DMC630MF三軸示教系統(tǒng)概述 DMC630MF 三軸示教系統(tǒng)是基于三軸運(yùn)動(dòng)控制器 DMC630M 的硬件平臺(tái),在公司三軸仿 形示教系統(tǒng)成熟的技術(shù)和廣泛的市場(chǎng)應(yīng)用的基礎(chǔ)上,根據(jù)市場(chǎng)需求,采納
2020-03-23 10:56:364745 DMC650M運(yùn)動(dòng)控制系統(tǒng) 典型應(yīng)用 科瑞特DMC650M運(yùn)動(dòng)控制器已廣泛應(yīng)用于各行各業(yè)自動(dòng)化設(shè)備中。主要設(shè)備有: 電子產(chǎn)品裝配、測(cè)量設(shè)備; 半導(dǎo)體、LCD生產(chǎn)設(shè)備; 激光加工設(shè)備; 生物、醫(yī)學(xué)自動(dòng)
2020-04-09 16:45:534833 這種運(yùn)動(dòng)控制器大都采用DSP或微機(jī)芯片作為CPU,可完成運(yùn)動(dòng)規(guī)劃、高速實(shí)時(shí)插補(bǔ)、伺服濾波控制和伺服驅(qū)動(dòng),外部IO之間的標(biāo)準(zhǔn)化通用接口功能,它開(kāi)放的函數(shù)庫(kù)可提供用戶根據(jù)不同的需要,在DOS或Windows等平臺(tái)下開(kāi)發(fā)應(yīng)用軟件,組成各種控制系統(tǒng)。目前這種運(yùn)動(dòng)控制器得到了廣泛的應(yīng)用。
2020-04-23 09:13:422355 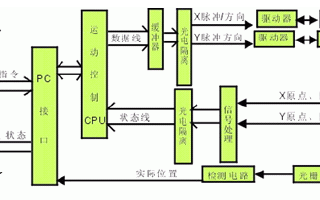
運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來(lái)完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無(wú)縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
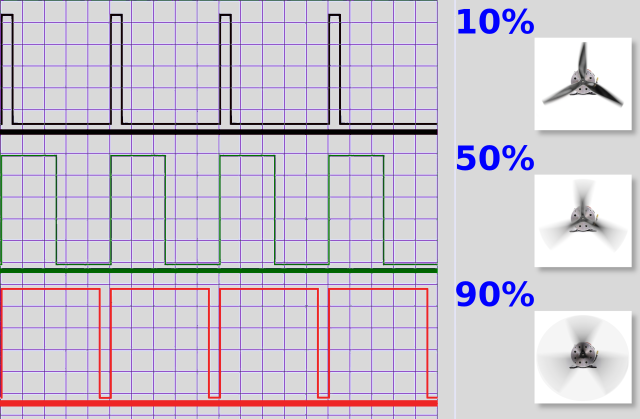
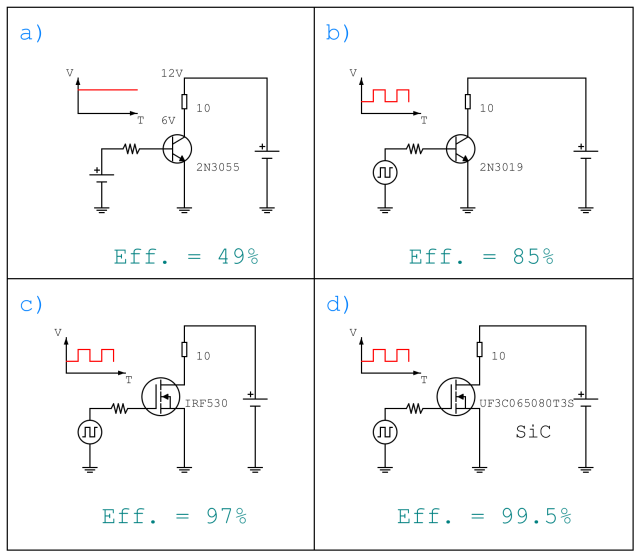
2022-07-22 09:52:463864 完整的發(fā)動(dòng)機(jī)控制系統(tǒng)包括電源、主機(jī)微控制器、柵極驅(qū)動(dòng)器和半橋拓?fù)浣Y(jié)構(gòu)的 MOSFET。微控制器設(shè)置 PWM 占空比并負(fù)責(zé)反饋??或開(kāi)環(huán)控制。在低電壓項(xiàng)目中,柵極驅(qū)動(dòng)器和 MOSFET 通常集成到一個(gè)單元中。然而,對(duì)于大功率單元,兩個(gè)單元是分開(kāi)的,以方便熱管理和最小化電磁干擾。
2022-08-09 09:13:233098 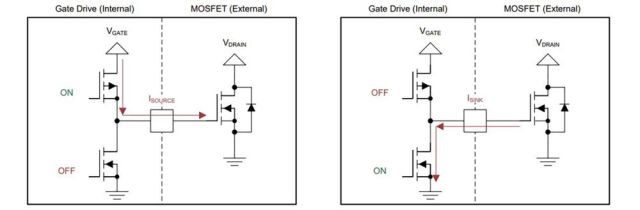
項(xiàng)目需求 利用運(yùn)動(dòng)控制卡,快速搭建運(yùn)動(dòng)控制平臺(tái)。所需硬件:個(gè)人電腦;正運(yùn)動(dòng)控制卡;艾思控驅(qū)動(dòng)器;鳴志直流無(wú)刷電機(jī)。軟件平臺(tái):python 硬件介紹 正運(yùn)動(dòng)控制卡 控制卡用于接收PC的運(yùn)動(dòng)指令,然后
2023-03-10 10:01:130 運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來(lái)完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無(wú)縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-03-14 09:17:02290 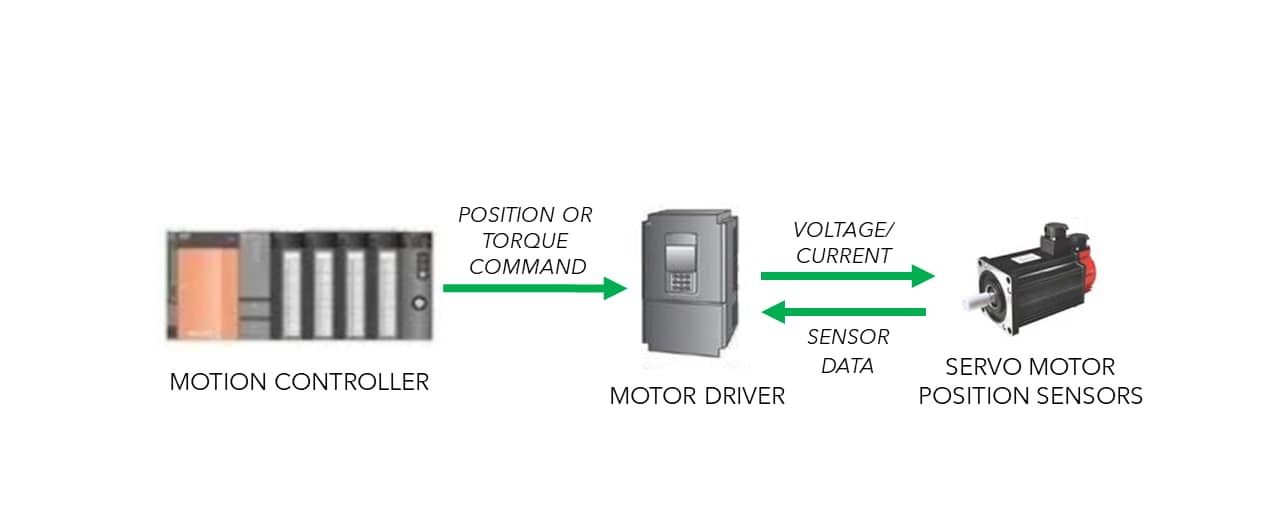
工業(yè)驅(qū)動(dòng)器的諸多方面都對(duì)實(shí)現(xiàn)精密的運(yùn)動(dòng)控制很重要,精密運(yùn)動(dòng)控制涉及實(shí)時(shí)控制設(shè)計(jì)中的三個(gè)基礎(chǔ)子系統(tǒng),即感應(yīng)、處理和驅(qū)動(dòng)。 本文將論述各個(gè)子系統(tǒng)的支持技術(shù)示例
2023-04-04 09:52:04368 運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來(lái)講,運(yùn)動(dòng)的要素
2023-04-21 18:02:141214 控制系統(tǒng)的硬件主要由上位計(jì)算機(jī)、運(yùn)動(dòng)控制器、功率驅(qū)動(dòng)裝置、電動(dòng)機(jī)和 反饋檢測(cè)裝置和被控對(duì)象等幾部分組成,如圖1所示。電動(dòng)機(jī)及其功率驅(qū)動(dòng)裝置作為執(zhí)行器主要為被控對(duì)象提供動(dòng)力,特別設(shè)計(jì)應(yīng)用于伺服系統(tǒng)的電機(jī)稱之為伺服
2023-04-21 18:04:19693 運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)控制系統(tǒng)的硬件主要由:上位機(jī)、運(yùn)動(dòng)控制器、功率驅(qū)動(dòng)裝置、電動(dòng)機(jī)、執(zhí)行機(jī)構(gòu)和傳感器反饋檢測(cè)裝置等部分組成。
2023-05-10 11:46:211048 
運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來(lái)完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無(wú)縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-05-25 10:28:55410 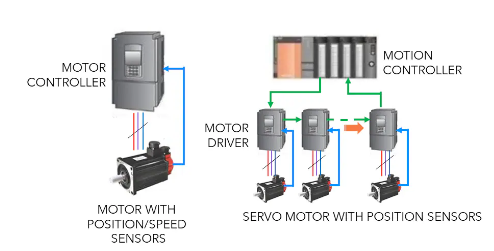
典型的運(yùn)動(dòng)控制器卡和模塊包括運(yùn)動(dòng)控制IC、微處理器以及用于處理高速編碼器信號(hào)的DSP或定制ASIC。控制器向驅(qū)動(dòng)器或放大器提供速度和旋轉(zhuǎn)方向信號(hào),進(jìn)而提供適當(dāng)?shù)碾妷汉碗娏鳎üβ剩┧絹?lái)操作電機(jī)。要設(shè)計(jì)具有反饋的魯棒且容錯(cuò)的運(yùn)動(dòng)控制系統(tǒng),必須在設(shè)計(jì)期間在系統(tǒng)級(jí)別解決以下事項(xiàng):
2023-06-12 14:51:11424 
在自動(dòng)化領(lǐng)域,運(yùn)動(dòng)控制器和基本的伺服驅(qū)動(dòng)器之間存在著微妙的差異。許多應(yīng)用都需要運(yùn)動(dòng)控制器和伺服驅(qū)動(dòng)器共同組成一個(gè)完整的系統(tǒng),因此,掌握每個(gè)設(shè)備的功能和智能水平至關(guān)重要。 ? 伺服系統(tǒng) 伺服驅(qū)動(dòng)
2023-07-10 10:02:25985 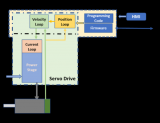
轉(zhuǎn)換器(ADC),并與運(yùn)動(dòng)控制系統(tǒng)中的伺服電機(jī)、驅(qū)動(dòng)器和傳感器等設(shè)備進(jìn)行通訊。運(yùn)動(dòng)控制器被廣泛應(yīng)用于許多領(lǐng)域,尤其是在交流伺服和多軸控制系統(tǒng)中。它可以充分利用計(jì)算資
2023-07-31 17:42:41555 
如何在工業(yè)驅(qū)動(dòng)器中實(shí)現(xiàn)精密的運(yùn)動(dòng)控制
2023-08-24 13:37:08283 
轉(zhuǎn)換器(ADC),并與運(yùn)動(dòng)控制系統(tǒng)中的伺服電機(jī)、驅(qū)動(dòng)器和傳感器等設(shè)備進(jìn)行通訊。運(yùn)動(dòng)控制器被廣泛應(yīng)用于許多領(lǐng)域,尤其是在交流伺服和多軸控制系統(tǒng)中。它可以充分利用計(jì)算資
2023-09-21 08:08:39470 運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來(lái)講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52819 工業(yè)驅(qū)動(dòng)器的諸多方面都對(duì)實(shí)現(xiàn)精密的運(yùn)動(dòng)控制很重要,精密運(yùn)動(dòng)控制涉及實(shí)時(shí)控制設(shè)計(jì)中的三個(gè)基礎(chǔ)子系統(tǒng),即感應(yīng)、處理和驅(qū)動(dòng)。本文將論述各個(gè)子系統(tǒng)的支持技術(shù)示例。
2023-11-18 16:00:13260 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論