 電子發(fā)燒友App
電子發(fā)燒友App


本節(jié)介紹幾種常用的PLC控制電路,并與繼電器接觸器控制電路相對照,使讀者在掌握了繼電控制系統(tǒng)的基礎上,全面地了解PLC的控制原理和應用技術。
電動機的啟停控制
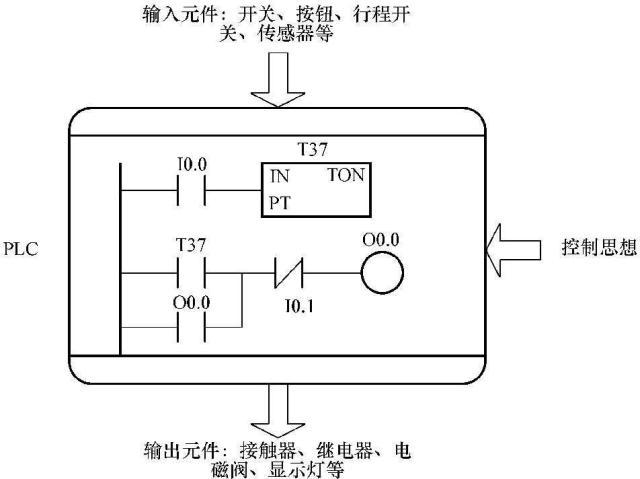
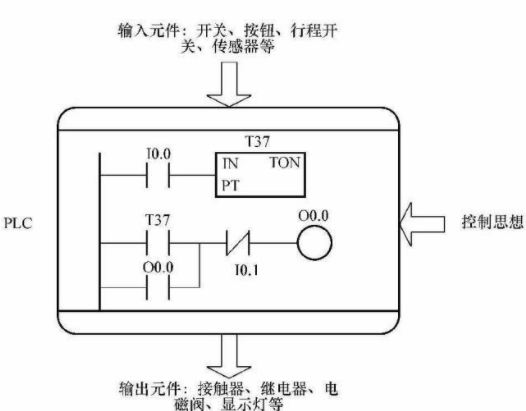
圖5-50 PLC控制系統(tǒng)的組成
PLC控制系統(tǒng)由硬件和軟件兩部分組成,如圖5-50所示。 硬件部分:將輸入元件通過輸入點與PLC連接,輸出元件通過輸出點與PLC連接,構成PLC控制系統(tǒng)的硬件部分。 軟件部分:用PLC指令將控制思想轉變?yōu)镻LC可以接受的程序。
啟動控制:通常使用按鈕來實現(xiàn),將其動合觸點接到PLC的輸入點,PLC輸入映像寄存器中的對應位與該觸點形成映射關系,用數(shù)字量“1”和“0”反映觸點的接通和閉合狀態(tài),如圖5-51所示。 電動機先連接接觸器,接觸器的主觸點接到PLC的輸出點,PLC中有一個輸出映像寄存器與各輸出點形成一一對應的映射關系。
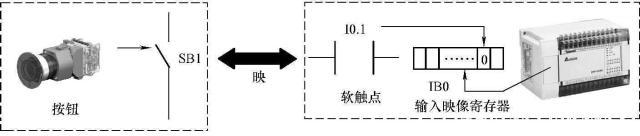
圖5-51 按鈕與輸入映像寄存器的映射
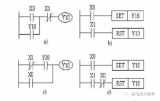
通常的啟動控制,只需將啟動按鈕接在PLC的輸入點,電動機接到PLC的輸出點即可實現(xiàn)。 圖5-53的梯形圖,電路功能單一,不能自鎖,只能實現(xiàn)簡單的點動功能。 與繼電控制圖5-52(b)實現(xiàn)的功能相同。 圖5-54梯形圖,使用輸出線圈的輔助觸點(軟觸點)與按鈕映射觸點(軟觸點)并聯(lián),稱為自鎖。 將簡單的啟動電路增加了自鎖功能,這樣手離開按鈕后,電動機可以繼續(xù)運行。 與繼電控制圖5-52(c)實現(xiàn)的功能相同。 圖5-55梯形圖,使用按鈕的動斷觸點接到PLC的輸入點,在梯形圖中起到切斷主干通道控制信號的作用,因此,按鈕的動斷觸點串聯(lián)在被控線圈的主通道上。 圖中增加了停止按鈕,使其具備啟動保持停止的功能。 與繼電控制圖5-52(d)實現(xiàn)的功能相同。 讀者將兩種控制裝置對照比較,便可以了解PLC軟硬件以及如何利用梯形圖來實現(xiàn)控制的功能。
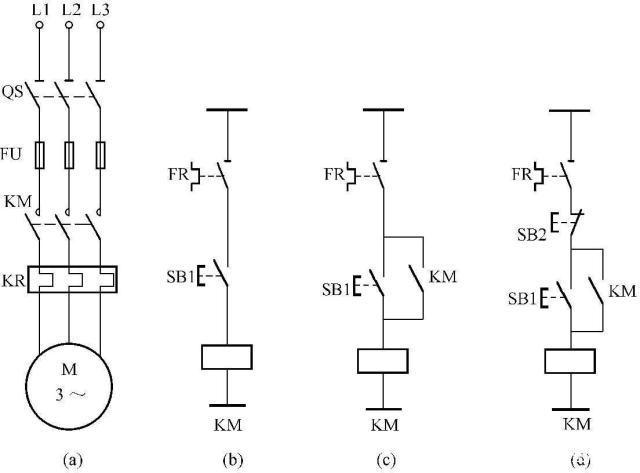
圖5-52 電動機繼電控制的啟停電路
(a)主電路; (b)點動控制; (c)帶自鎖的點動控制; (d)典型的啟停控制
圖5-55電路中包含了啟動、保持和停止控制,是最典型的啟保停控制電路,讀圖時將三個梯形圖對應分析。 在實際電路中還需加上一些保護措施,如互鎖保護、過載保護等,梯形圖相對復雜些。 梯形圖實現(xiàn)的電動機啟停控制與繼電器接觸器控制系統(tǒng)功能相同,梯形圖表達得更簡練、直觀。
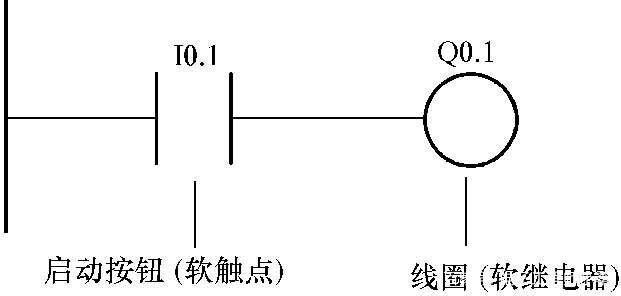
圖5-53 最簡單電動機啟動程序
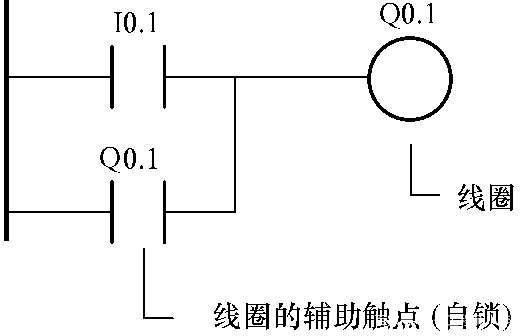
圖5-54 帶自鎖觸點啟動程序
電動機正反轉控制
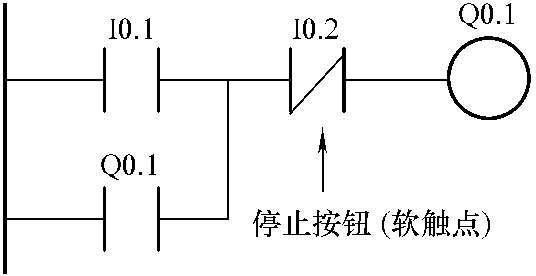
圖5-55 帶停止按鈕的電動機啟動程序
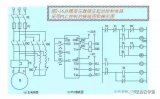
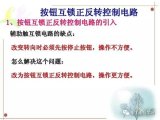
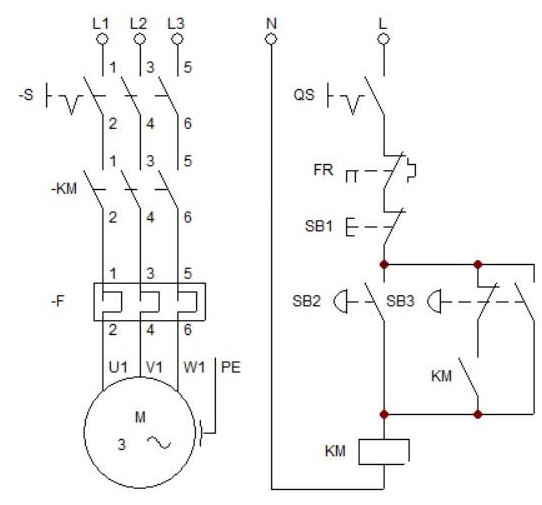
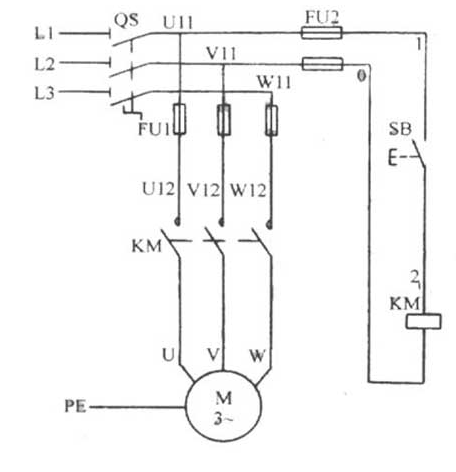
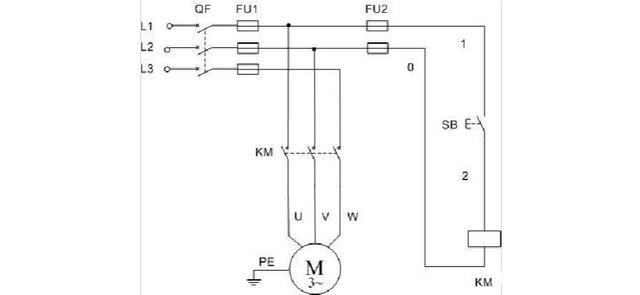
前面已經介紹了利用繼電控制系統(tǒng)實現(xiàn)電動機的正反轉控制。 要實現(xiàn)三相電動機正反轉,只需將接入電動機的三相中任意交換其中兩相,如圖5-56所示。 梯形圖在啟保停電路的基礎上,為了防止電動機正反轉同時接通而燒毀電動機線圈,加入互鎖保護,從而構成了簡單的正反轉控制程序,如圖5-57所示。 在實際電路中,通常使用按鈕、行程開關和傳感器等發(fā)出的控制信號作為正反轉切換的輸入信號。
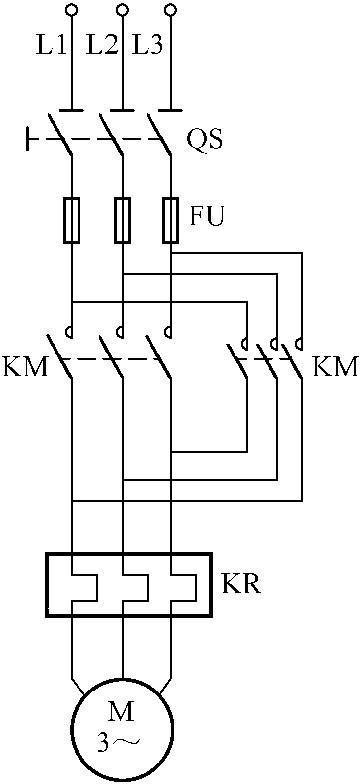
圖5-56 正/反轉控制電路
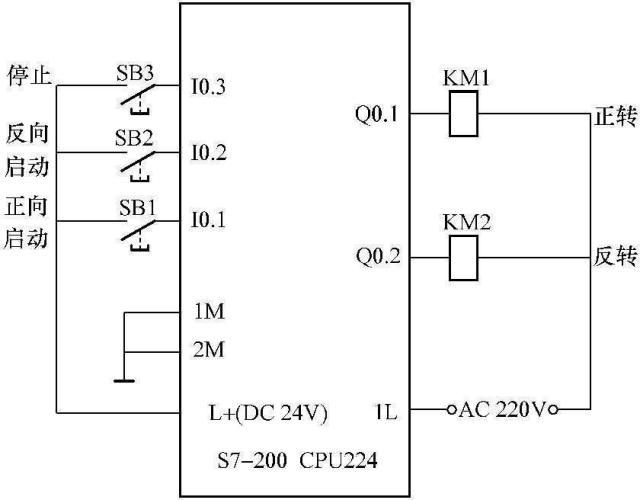
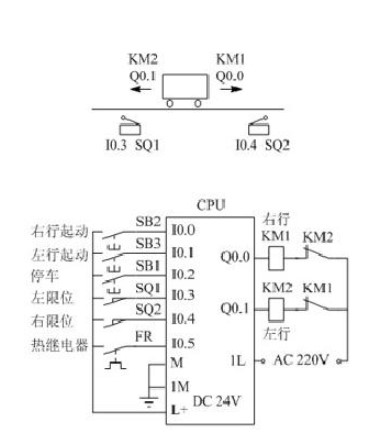
圖5-57 輸入/輸出配置及外部接線圖
實現(xiàn)電動機正反向啟動控制。 按下SB1,電動機正向啟動(保持運行狀態(tài)); 按下SB2,電動機反向運行,按下SB3,電動機停止。
(1)要實現(xiàn)正反轉,需要使用兩個接觸器KM1、KM2。 對應PLC輸入點可選Q0.1、Q0.2。
(2)因為正反轉電路中,若同時接通會造成短路,因此每次只能接通其一。 一種方法可以使用帶互鎖的按鈕,另一種方法可以將接觸器的動斷輔助觸點接到對方電路中。 本例中采用雙重互鎖,為保持某一方向的運行狀態(tài),應使用自鎖觸點。
(3)不可能讓電動機無休止地運行下去,因此將停止按鈕的動斷觸點串聯(lián)在對應的電路中。
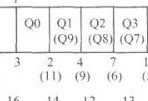
根據輸入輸出點數(shù)分配I/O地址,見表5-8。
表5-8 I/O地址分配表

根據PLC上對應的I/O點進行連線,按S7-200的說明書將電源線接好,示意圖如圖5-57所示。 由于PLC的輸出往往是強電,所以操作時一定要遵守安全操作規(guī)程,檢驗沒問題的情況下才可以通電調試。
進入Step7 MicroWin32開發(fā)環(huán)境設計梯形圖程序,如圖5-58所示。 其動作原理的分析與繼電器控制相同。
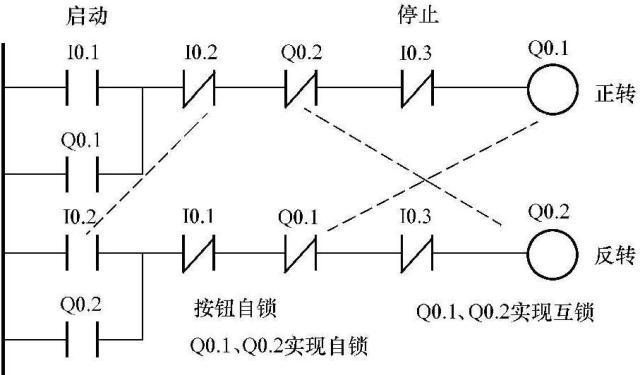
圖5-58 電動機正反轉控制梯形圖
Y-△減壓啟動
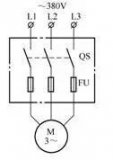
星形三角形減壓啟動能大大減少啟動電流,減少電流沖擊和延長電動機使用壽命,在輕載或空載的啟動電路中得到廣泛應用。 圖5-59為Y-△減壓啟動控制電路圖。 前面已講過Y-△啟動控制電路圖,雖然作用雷同,但實現(xiàn)的線路有所不同,讀者可比較分析。
圖5-59星形三角形減壓啟動控制系統(tǒng)。 控制過程:按下SB2電動機星形啟動,延時3s切換至三角形運行狀態(tài),按下SB1,系統(tǒng)停止運行。
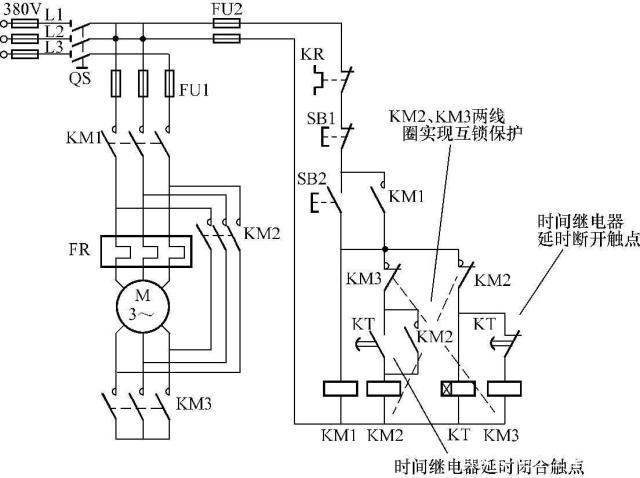
圖5-59 Y-△減壓啟動控制電路
繼電控制系統(tǒng)的控制過程如下。
(1)電動機星形連接時,三相繞組線圈的一端連在一起,三角形連接時,三相繞組線圈的頭尾分別相連。 要實現(xiàn)這兩種狀態(tài)的切換,需用3個接觸器KM1、KM2、KM3,連接方式如圖5-59所示。
(2)KM1、KM3通電,KM2斷開時,電動機星形連接。
(3)KM1、KM2通電,KM3斷開時,電動機為三角形連接。
為防止切換到三角形連接時KM3不能及時斷開而產生短路,在KM2和KM3之間建立互鎖保護。
SB1為停止按鈕,串聯(lián)在能夠切斷整個控制電路的地方。
依據上述電路的工作過程,根據所需元件,設置I/O地址,其分配I/O地址見表5-9。 將其繼電控制系統(tǒng)轉化為PLC編程控制系統(tǒng)。 讀者可根據其設計的思路來分析,依據分析繼電控制原理的方式設計PLC的梯形圖。

表5-9 Y-△減壓啟動I/O地址
根據傳統(tǒng)繼電控制電路圖,將其轉化成PLC的梯形圖,如圖5-60所示。 讀者首先要明確 Y-△減壓啟動I/O地址以及所用軟繼電器的作用,PLC的書寫規(guī)則。 識圖時采用順藤摸瓜的方法,沿著繼電器控制電路的每一支路上的輸入輸出元件,在PLC控制程序梯形圖中用對應的指令取代,再對其位置依據符合PLC書寫規(guī)則分析即可。 Y-△減壓啟動梯形圖中用定時器代替了繼電控制中的時間繼電器。
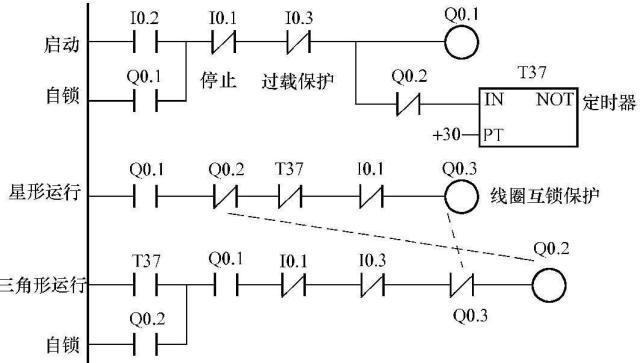
圖5-60 Y-△減壓啟動梯形圖
為了幫助讀者更好地理解梯形圖程序的執(zhí)行過程,圖5-60中梯形圖程序執(zhí)行過程分析如下:
按下SB2觸點I0.2閉合→線圈Q0.1得電并自鎖;定時器T37啟動→線圈Q0.1動合觸點閉合,線圈Q0.3得電→星形運行;同時Q0.3的動斷觸點斷開,實現(xiàn)了互鎖。
在按下SB2的同時→定時器T37定時3s→時間到,則T37動斷觸點斷開,線圈Q0.3失電;T37動合觸點接通,線圈Q0.2得電并自鎖→三角形運行。 Q0.2的動斷觸點斷開,實現(xiàn)了互鎖。 Q0.2動斷觸點斷開,定時器復位。
按下SB1停止按鈕→整個系統(tǒng)停止運行。
操作人員可根據PLC上對應的I/O點進行硬件連線,按S7-200的說明書將電源線接好。 由于PLC的輸出往往是強電,所以操作時一定要遵守安全操作規(guī)程,檢驗合格后才可以加電調試。
多點啟動控制電路
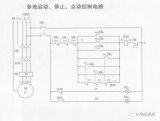
在很多設備裝置中,為了操作方便,常要求能在多個地點進行控制操作; 在某些機械設備上,為保證操作者的安全,需要滿足多個條件設備才能開始工作。 這樣的控制要求可以通過在電路中串聯(lián)或并聯(lián)電器的動斷觸點(常閉觸點)或動合觸點(常開觸點)來實現(xiàn),如圖5-61、圖5-62所示。
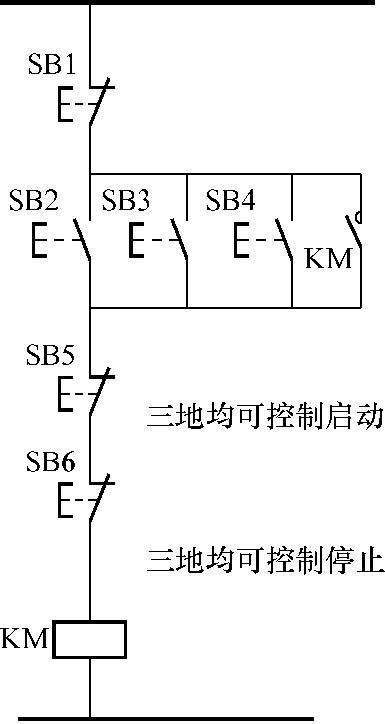
圖5-61 多地點控制電路
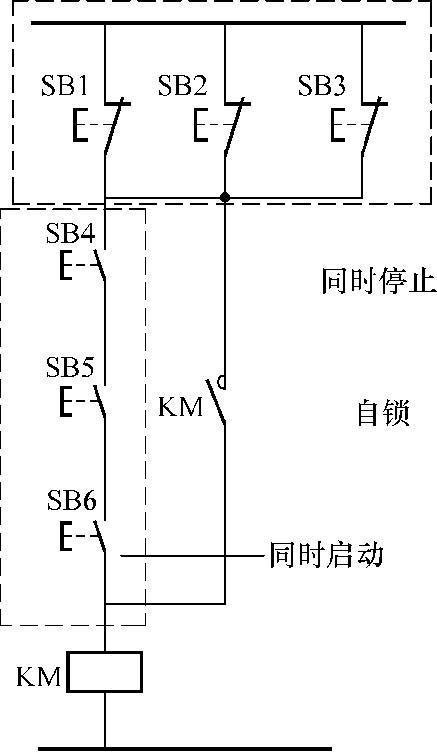
圖5-62 條件控制電路
多地點控制電路,可以使用設置在不同位置的啟動按鈕啟動設備,如圖5-61所示,啟動按鈕SB2~SB4分別設置在A地、B地和C地,按下任何一個啟動按鈕,KM線圈自鎖,保持設備的運行狀態(tài)。 3個停止按鈕為SB1、SB5、SB5,保證在方便的位置啟動和停止設備。 如按表5-10設置I/O地址,則轉化成PLC梯形圖控制程序如圖5-63所示。
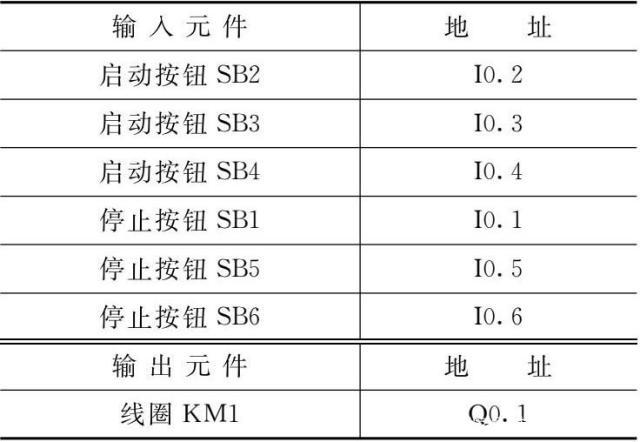
表5-10 多地點控制電路I/O地址分配表
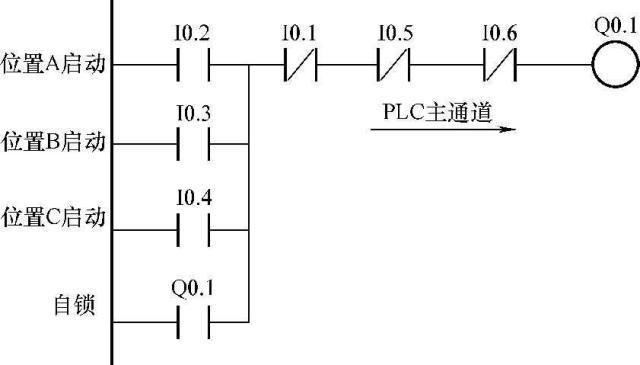
圖5-63 多點控制梯形圖程序
多條件控制電路中,要啟動設備,處在A地、B地和C地3個不同地點的操作者必須同時按下啟動按鈕SB4、SB5、SB6,要停止設備也需要3個操作者同時按下停止按鈕SB1、SB2、SB3才能完成。 因大型設備往往有很多工作位置,而單個操作者無法看清所有的位置,為了防止出現(xiàn)安全意外,根據設備的工作條件和安裝情況,需要布置多個條件點。 按表5-11設置I/O地址,將圖5-62轉化成PLC控制程序,如圖5-64所示。

表5-11 條件控制電路I/O地址分配表
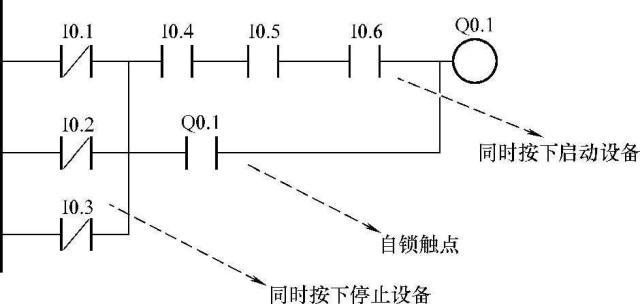
圖5-64 多條件控制梯形圖程序
自動門控制電路
自動門控制系統(tǒng)是利用PLC啟保停電路的編程實現(xiàn)控制門的開關自動控制。 自動門控制系統(tǒng)的順序功能圖和梯形圖如圖5-65、5-66所示。
控制要求及控制步驟分析如下。
(1)當人靠近自動門時,感應器X0為ON,Y0驅動電動機高速開門,碰到開門減速開關X1時,變?yōu)闇p速開門。 碰到開門極限開關X2時,電動機停轉,開始延時。 若在0.5s內感應器檢測無人,Y2啟動電動機高速關門。 碰到開門減速開關X4時,改為減速門,碰到開門極限開關X5時,電動機停轉。 在關門期間,若感應器檢測到有人,停止關門,T1延時0.5s后自動轉換為高速開門。
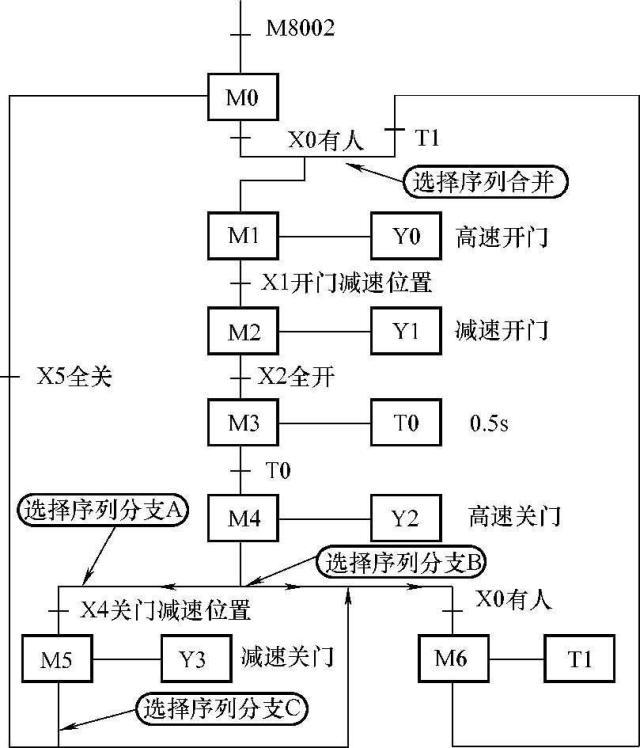
圖5-65 自動門控制系統(tǒng)順序功能圖
在圖5-65中,步[1]之前有一個選擇序列的合并,當M0為活動步,并且轉換條件X0滿足,或M6為活動步,且轉換條件T1滿足時,步M1都應變?yōu)榛顒硬剑纯刂芃1的啟動、保持、停止電路的啟動條件應為M0和X0動合觸點串聯(lián)電路與M6和T1的動合觸點串聯(lián)電路進行并聯(lián)(見圖5-66的第二梯級)。
在圖5-65中,M4之后有一個選擇序列的分支,當它的后續(xù)步M5、M6變?yōu)榛顒硬綍r,它應變?yōu)椴换顒硬健?所以,需要將M5和M6的動斷觸點與M4的線圈串聯(lián)。 同樣,M5之后也有一個選擇序列的分支,當它的后續(xù)步M0、M6變?yōu)榛顒硬綍r,它應變?yōu)椴换顒硬健?因此需要將M0、M6的動合觸點串聯(lián)電路與M5的線圈串聯(lián)。
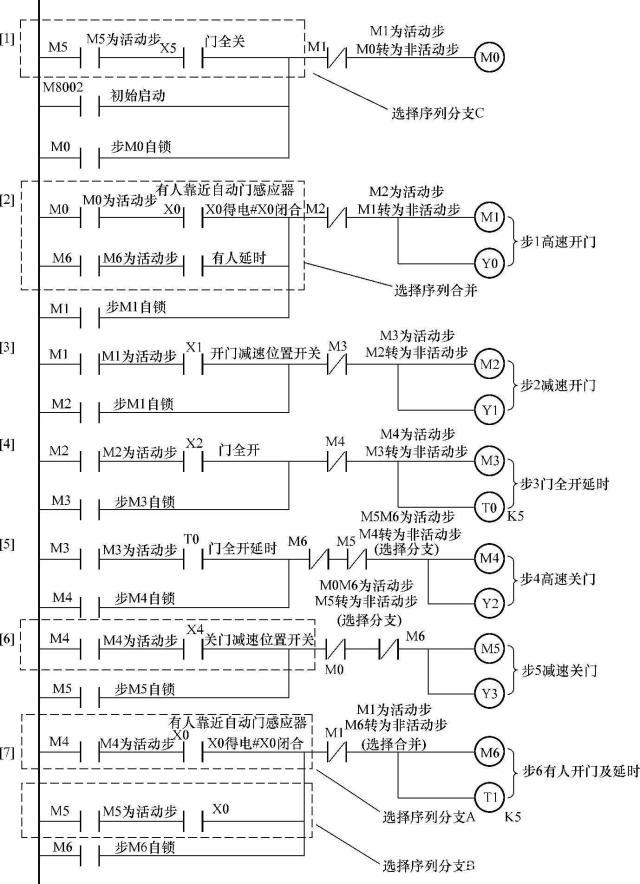
圖5-66 自動門控制梯形圖
初始啟動過程:PLC開始運行后,M8002自動接通1個掃描周期,M0得電,M0(2)閉合,M0(1)閉合、自鎖。
先分析步[1]~步[4]的工作過程(見圖5-64):
當人靠近自動門感應器時,輸入繼電器X0得電,X0閉合,M1得電(M1已閉合),步M1進入活動步。 …… 步4后進行選擇分支。
(2)無靠近自動門時,高速關門只減速關門位置,X4得電,X4閉合。 步M5后進行選擇分支。
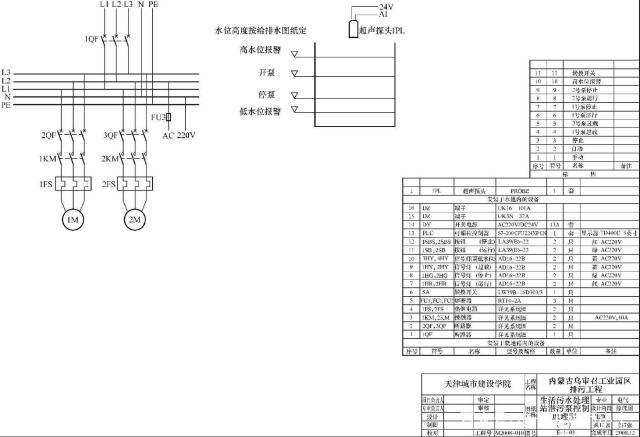
圖5-67 潛污泵控制電路
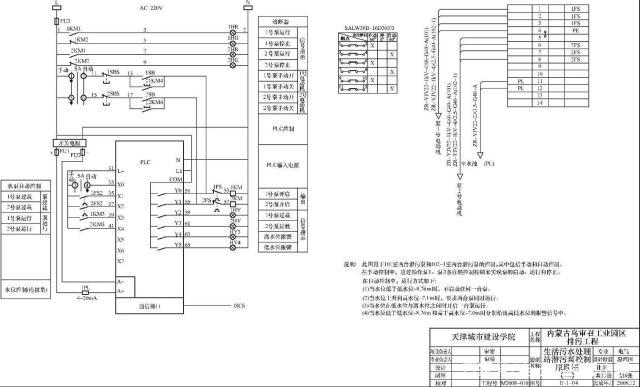
圖5-68 潛污泵控制電路
識圖時兩圖對照分析,讀者可自行識圖。
PLC電氣控制工程圖舉例
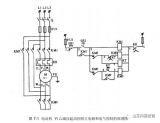
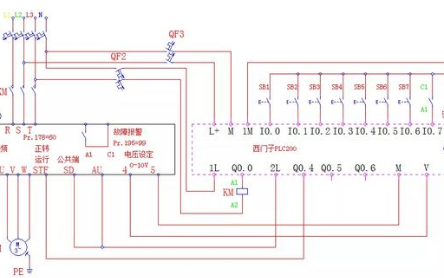
圖5-67、5-68為兩臺潛污泵啟動、運行和停止手動和自動控制的電氣工程圖。 主電路為圖5-67,與前述基本相同,圖中還標出了水位控制點及高低水位報警線,液位傳檢測采用了超聲波傳感器。 圖紙列出了設備清單。 而圖5-68采用了PLC控制潛污泵的啟動、停止及高低水位的報警。
根據工藝要求:在手動控制中,通過操作泵1、泵2各自的控制按鈕實現(xiàn)泵的啟動、運行和停止。
在自動控制中:
(1)當水位低于—8.76m時,兩臺泵處于停止狀態(tài)。
(2)當水位上升到高水位—7.1m時,兩臺泵同時運行。
(3)當水位在低水位與高水位之間時,開啟一臺泵運行。
(4)當水位低于—8.76m和高于高水位—7.1m時,分別給出高低水位的報警信號。
圖5-68將控制電路分成了若干個環(huán)節(jié),PLC的輸入、輸出繼電器的地址分配,從PLC模塊的接線圖可以看出,梯形圖是根據上述要求繪制的。 識讀時重點在于掌握如何在理解原理圖的基礎上閱讀工程圖。 圖中增加了一些輔助環(huán)節(jié),如手自動轉換開關、信號顯示等以及交直流電源。 識圖者依照先主后輔的原則,先分析主要功能再分析輔助環(huán)節(jié)。
圖中通過超聲波傳感器發(fā)出電信號,傳送給PLC,PLC則根據電信號相對應的液位高度,發(fā)出指令控制泵的運行狀態(tài)。 圖5-68是完整的施工圖,PLC模塊的輸入輸出接線及與外部的連接方式表達得很清楚,讀者可根據原理圖及接線方式對照分析。













 工商網監(jiān)
工商網監(jiān)
評論