 電子發(fā)燒友App
電子發(fā)燒友App


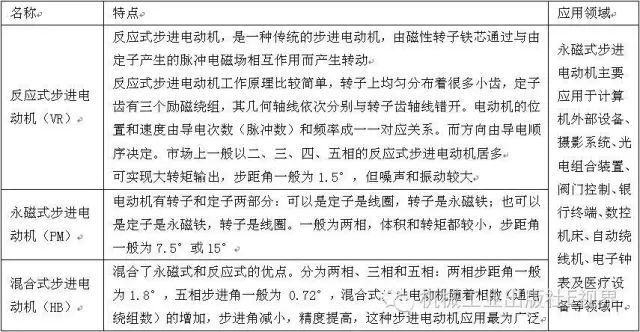
一.步進(jìn)電動(dòng)機(jī)的構(gòu)造
步進(jìn)電動(dòng)機(jī)構(gòu)造上大致分為定子與轉(zhuǎn)子兩部分。 轉(zhuǎn)子由轉(zhuǎn)子 1、轉(zhuǎn)子 2、永久磁鋼等 3 部分構(gòu)成。而且轉(zhuǎn)子朝軸方向 已經(jīng)磁化,轉(zhuǎn)子 1 為 N 極時(shí),轉(zhuǎn)子 2 則為 S 極。
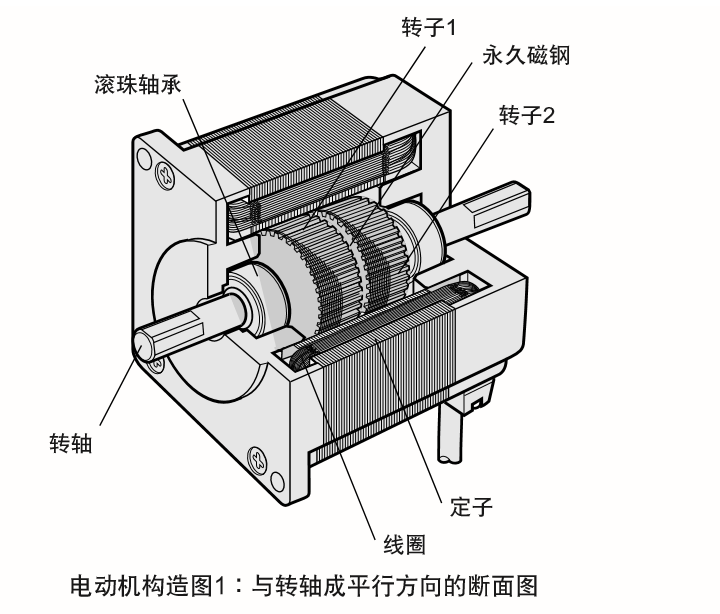
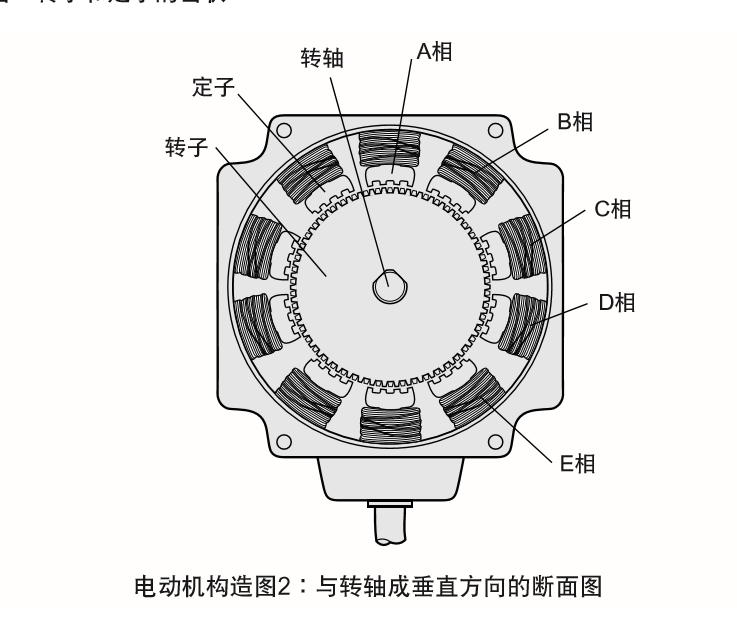
定子擁有小齒狀的磁極,共有 10 個(gè),皆繞有線圈。 其線圈的對(duì)角位置的磁極相互連接著,電流流通后,線圈即會(huì)被磁 化成同一極性。(例如某一線圈經(jīng)由電流的流通后,對(duì)角線的磁極將 同化成 S 極或 N 極。) 對(duì)角線的 2 個(gè)磁極形成 1 個(gè)相,而由于有 A 相至 E 相等 5 個(gè)相位, 因此稱為 5 相步進(jìn)電動(dòng)機(jī)。 轉(zhuǎn)子的外圈由 50 個(gè)小齒構(gòu)成,轉(zhuǎn)子 1 和轉(zhuǎn)子 2 的小齒于構(gòu)造上互 相錯(cuò)開 1/2 螺距。
勵(lì)磁∶電動(dòng)機(jī)線圈通電時(shí)的狀態(tài) 磁極∶經(jīng)由勵(lì)磁而磁化的定子的突出部分 小齒∶轉(zhuǎn)子和定子的齒狀
二.步進(jìn)電動(dòng)機(jī)的工作原理
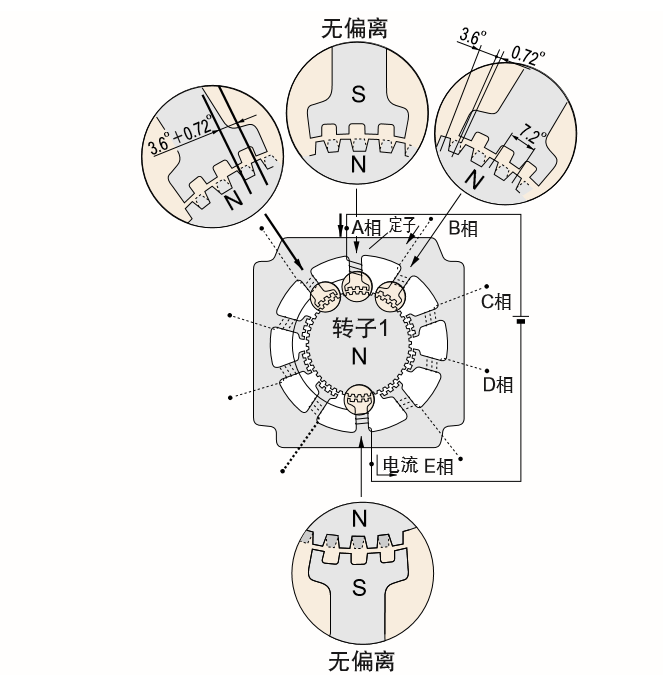
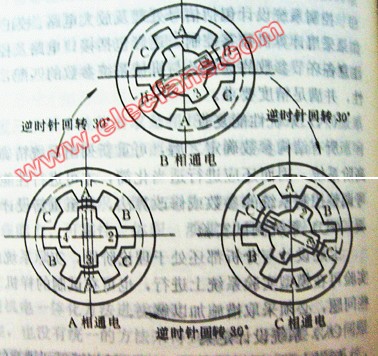
實(shí)際上經(jīng)過磁化后的轉(zhuǎn)子及定子的小齒的位置關(guān)系,在此說明如下。
A相勵(lì)磁
將 A 相勵(lì)磁,會(huì)使得磁極磁化成 S 極,而其將與帶有 N 極磁性的 轉(zhuǎn)子 1 的小齒互相吸引,并與帶有 S 極磁性的轉(zhuǎn)子 2 的小齒相斥, 于平衡后停止。此時(shí),沒有勵(lì)磁的 B 相磁極的小齒和帶有 S 極磁性 的轉(zhuǎn)子 2 的小齒互相偏離 0.72°。以上是 A 相勵(lì)磁時(shí)的定子和轉(zhuǎn)子 小齒的位置關(guān)系。
B相勵(lì)磁
其次由 A 相勵(lì)磁轉(zhuǎn)為 B 相勵(lì)磁時(shí),B 相磁極磁化成 N 極,與擁有 S 極磁性的轉(zhuǎn)子 2 互相吸引,而與擁有 N 極磁性的轉(zhuǎn)子 1 相斥
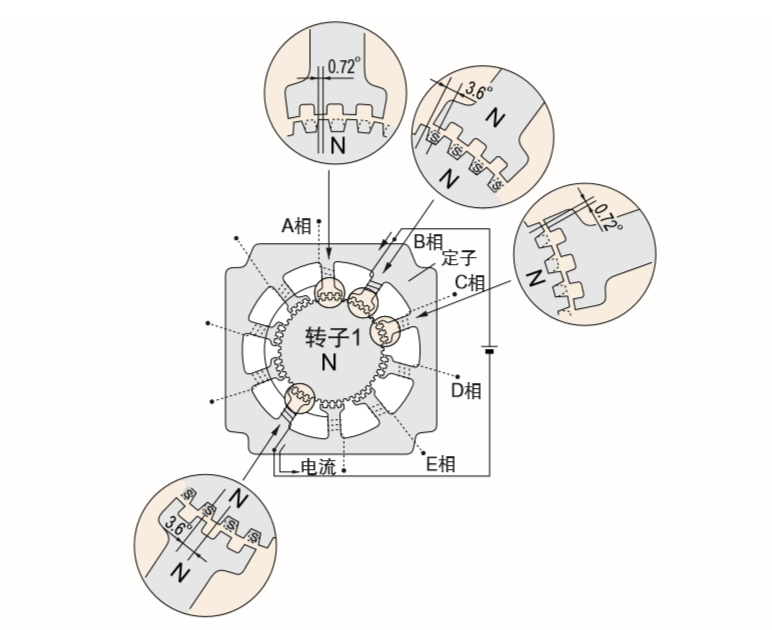
也就是說,從A相勵(lì)磁轉(zhuǎn)換至B相勵(lì)磁時(shí),轉(zhuǎn)子轉(zhuǎn)動(dòng)0.72°。由此可知, 勵(lì)磁相位隨 A 相→ B 相→ C 相→ D 相→ E 相→ A 相依次轉(zhuǎn)換,則 步進(jìn)電動(dòng)機(jī)以每次 0.72°做正確的轉(zhuǎn)動(dòng)。同樣的,希望作反方向轉(zhuǎn) 動(dòng)時(shí),只需將勵(lì)磁順序倒轉(zhuǎn),依照 A 相→ E 相→ D 相→ C 相→ B 相→ A 相勵(lì)磁即可。 0.72°的高分辨率,是取決于定子和轉(zhuǎn)子構(gòu)造上的機(jī)械偏移量,所 以不需要編碼器等傳感器即可正確的定位。另外,就停止精度而言, 會(huì)影響的只有定子與轉(zhuǎn)子的加工精度、組裝精度、及線圈的直流電 阻的不同等而已,因此可獲得 ±3 分(無負(fù)載時(shí))的高停止精度。 實(shí)際上步進(jìn)電動(dòng)機(jī)是由驅(qū)動(dòng)器來進(jìn)行勵(lì)磁相的轉(zhuǎn)換,而勵(lì)磁相的轉(zhuǎn) 換時(shí)機(jī)則是由輸入驅(qū)動(dòng)器的脈沖信號(hào)所進(jìn)行。以上舉的是 1 相位勵(lì) 磁的例子,實(shí)際運(yùn)轉(zhuǎn)時(shí),為有效利用線圈同時(shí)進(jìn)行 4 相或 5 相勵(lì)磁的。
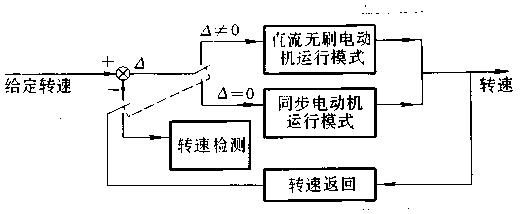
●控制方法的概要
◇內(nèi)藏新開發(fā)的轉(zhuǎn)子位置檢測(cè)傳感器 在電動(dòng)機(jī)的反輸出軸側(cè)藏有轉(zhuǎn)子位置檢測(cè)傳感器
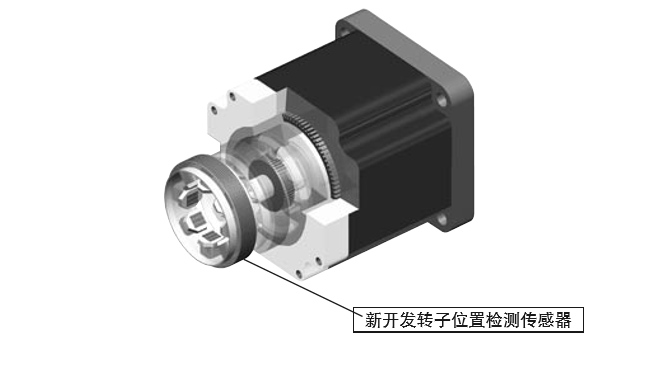
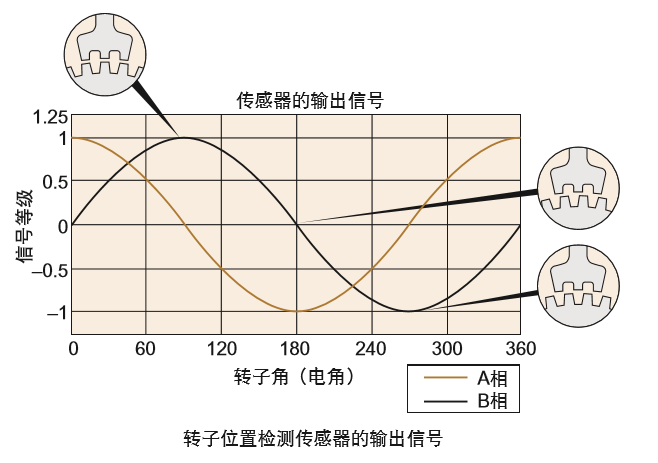
利用傳感器線圈檢測(cè)由于轉(zhuǎn)子運(yùn)轉(zhuǎn)位置所決定的磁阻的變化。
◇采用新概念的閉環(huán)控制系統(tǒng)
通過偏差計(jì)數(shù)器的演算可得知,脈沖信號(hào)的指令位置與實(shí)際的轉(zhuǎn)子 運(yùn)轉(zhuǎn)位置的偏差量(不足/過轉(zhuǎn))。 通過偏差計(jì)數(shù)器的演算結(jié)果判斷是否進(jìn)入「失步領(lǐng)域」,以轉(zhuǎn)換開環(huán) 模式/閉環(huán)模式。 · 位置偏差量未達(dá) ±1.8°時(shí),以開環(huán)模式進(jìn)行運(yùn)行。 · 位置偏差量超過 ±1.8°時(shí),以閉環(huán)模式進(jìn)行運(yùn)行。
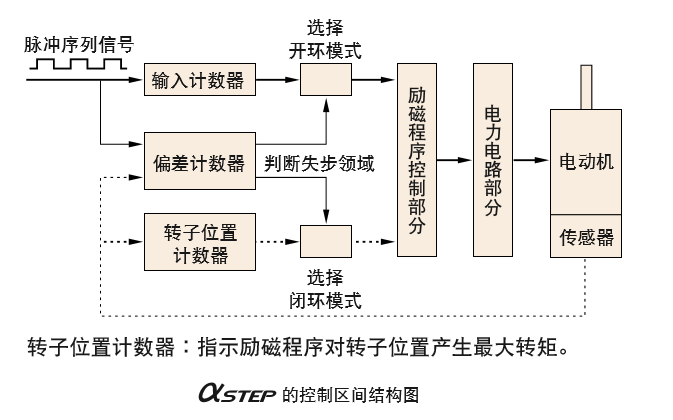
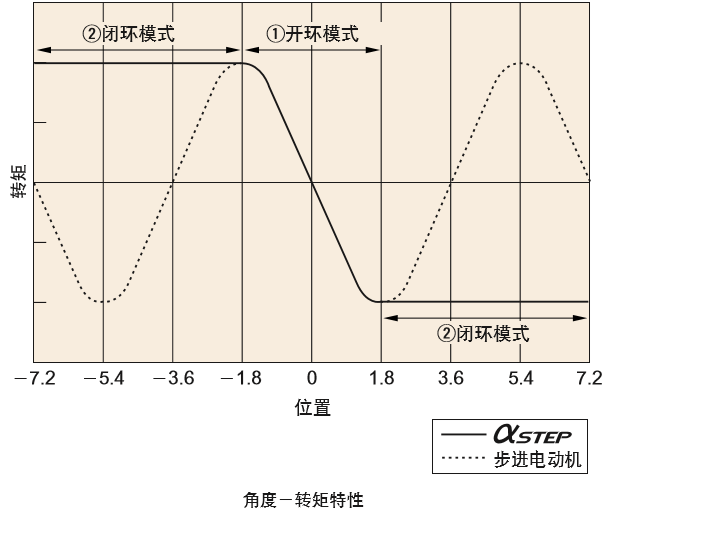
于閉環(huán)電路模式下,驅(qū)動(dòng)器會(huì)控制電動(dòng)機(jī)線圈的勵(lì)磁狀態(tài),令其對(duì) 于轉(zhuǎn)子運(yùn)轉(zhuǎn)位置產(chǎn)生最大轉(zhuǎn)矩。 采用此種控制方式,于角度-轉(zhuǎn)矩特性上沒有所謂的不穩(wěn)定點(diǎn)(失 步領(lǐng)域)。
◇提升步進(jìn)電動(dòng)機(jī)的性能
●高速領(lǐng)域的轉(zhuǎn)矩特性更容易使用 因?yàn)椴粫?huì)失步,因此使用時(shí)不需如以往的步進(jìn)電動(dòng)機(jī) 一般需要考慮以下各點(diǎn)∶ · 起因于控制器的脈沖 Profile 的加減速常數(shù)、慣性比的限制 · 起因于失步的起動(dòng)脈沖速度的限制 因此可更簡單的于超過自起動(dòng)領(lǐng)域的領(lǐng)域中進(jìn)行高速運(yùn)行。
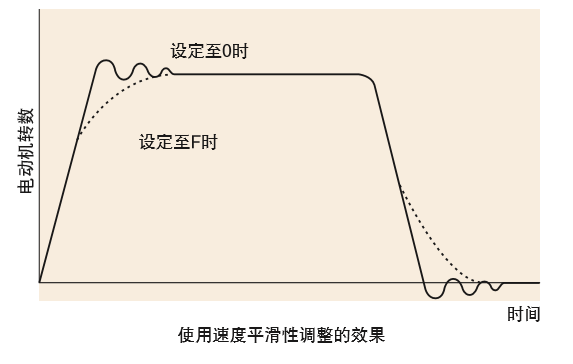
●使用速度濾波器開關(guān)調(diào)整起動(dòng)時(shí)/停止時(shí)的響應(yīng)性 不需變更控制器的數(shù)據(jù)(起動(dòng)脈沖速度、加減速常數(shù))即可將起 動(dòng)時(shí)/停止時(shí)的響應(yīng)性做 16 種類的調(diào)整。 此一功能主要目的是希望能減少對(duì)工作物的保護(hù),以及降低低速 運(yùn)行時(shí)的振動(dòng)。
步進(jìn)電動(dòng)機(jī)的基本特性
使用步進(jìn)電動(dòng)機(jī)時(shí),電動(dòng)機(jī)的特性是否符合使用條件,是相當(dāng)重要 的一點(diǎn)。 在此說明步進(jìn)電動(dòng)機(jī)使用時(shí)的重要特性。 步進(jìn)電動(dòng)機(jī)的特性可大略分為兩項(xiàng)。 ●動(dòng)態(tài)特性∶ 這是與步進(jìn)電動(dòng)機(jī)起動(dòng)或運(yùn)轉(zhuǎn)時(shí)有關(guān)的特性。主要會(huì)影響機(jī)器的 工作、周期時(shí)間等。 ●靜態(tài)特性∶ 這是與步進(jìn)電動(dòng)機(jī)停止時(shí)角度變化有關(guān)的特性,主要會(huì)影響機(jī)器 的精度。

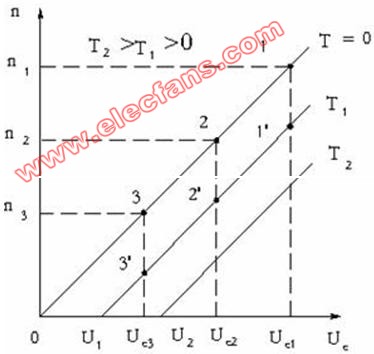
●動(dòng)態(tài)特性 ◇轉(zhuǎn)速-轉(zhuǎn)矩特性
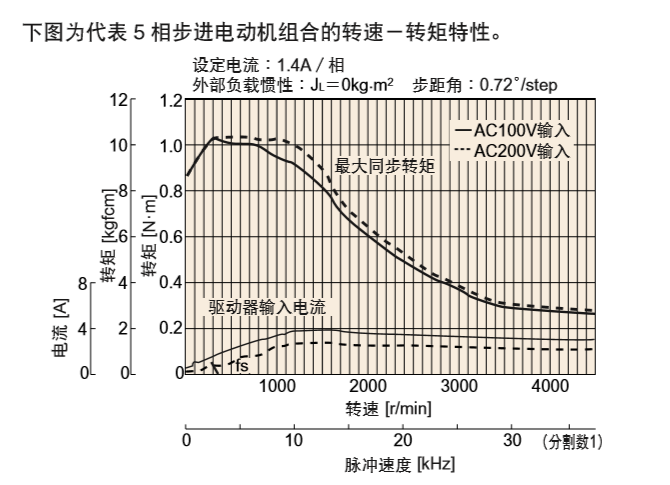
表示驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)時(shí)的轉(zhuǎn)速和轉(zhuǎn)矩的關(guān)系,其特性圖如上所示。 這是選用步進(jìn)電動(dòng)機(jī)時(shí)所必須考慮的特性。橫軸代表電動(dòng)機(jī)輸出軸 的轉(zhuǎn)速,而縱軸則代表轉(zhuǎn)矩。 轉(zhuǎn)速-轉(zhuǎn)矩特性取決于電動(dòng)機(jī)與驅(qū)動(dòng)器,因使用的驅(qū)動(dòng)器的種類不 同將產(chǎn)生很大的差異。
q 保持轉(zhuǎn)矩(Holding Torque) 步進(jìn)電動(dòng)機(jī)于通電狀態(tài)(額定電流)停止時(shí), 所能保持的最大轉(zhuǎn) 矩(保持力)。 w 最大同步轉(zhuǎn)矩(Pullout Torque) 各種轉(zhuǎn)速所能產(chǎn)生的最大轉(zhuǎn)矩。 選用電動(dòng)機(jī)時(shí)必須注意所需轉(zhuǎn)矩一定要在此曲線的內(nèi)側(cè)。 e 最大自起動(dòng)頻率(f s) 步進(jìn)電動(dòng)機(jī)于摩擦負(fù)載、慣性負(fù)載為 0 時(shí),可瞬時(shí)(無加減速時(shí) 間)起動(dòng)、停止的最大脈沖速度。 若以比此更大的脈沖速度來驅(qū)動(dòng)電動(dòng)機(jī)時(shí),則有必要進(jìn)行緩慢加 減速。電動(dòng)機(jī)上有慣性負(fù)載時(shí),則此頻率會(huì)有所下降。 (請(qǐng)參考慣性負(fù)載-自起動(dòng)頻率特性) 最大響應(yīng)頻率(f r) 步進(jìn)電動(dòng)機(jī)于摩擦負(fù)載、慣性負(fù)載轉(zhuǎn)為 0 時(shí),進(jìn)行緩慢的加減速 時(shí)可運(yùn)行的最大脈沖速度。
下圖為代表 5 相步進(jìn)電動(dòng)機(jī)組合的轉(zhuǎn)速-轉(zhuǎn)矩特性。
◇慣性負(fù)載-自起動(dòng)頻率特性
表示因自起動(dòng)頻率的慣性負(fù)載而產(chǎn)生變化的特性。 步進(jìn)電動(dòng)機(jī)的轉(zhuǎn)子本身或負(fù)載,因有慣性慣量存在,因此于瞬時(shí)起 動(dòng)或停止時(shí),電動(dòng)機(jī)軸會(huì)產(chǎn)生遲延或超過的現(xiàn)象。此一數(shù)值會(huì)隨脈 沖速度而變化,但是若超過某一數(shù)值時(shí)電動(dòng)機(jī)將無法追隨脈沖速度, 而產(chǎn)生失步(miss-step)現(xiàn)象。 此一即將失步前的脈沖速度就稱為自起動(dòng)頻率
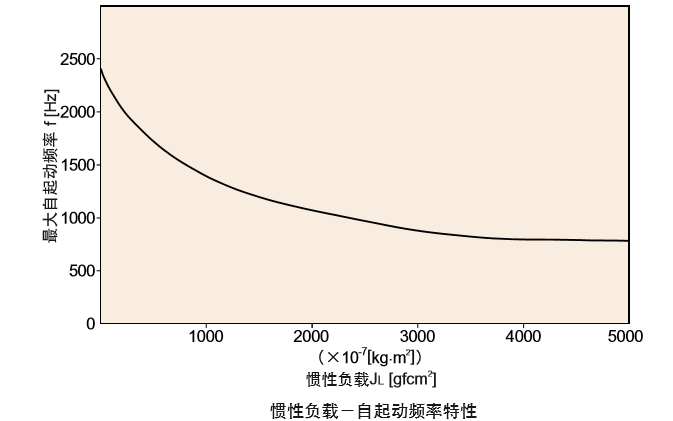
相對(duì)于慣性負(fù)載的最大自起動(dòng)頻率的變化可以下列公式算出近似值。
=f
fs
JL J0
[Hz]
1+
fs∶電動(dòng)機(jī)單體的最大自起動(dòng)頻率 [Hz] f ∶有慣性負(fù)載時(shí)的最大自起動(dòng)頻率 [Hz] Jo∶轉(zhuǎn)動(dòng)慣量 [kg.m2(gfcm2)] JL∶負(fù)載的慣性慣量 [kg.m2(gfcm2)] (J= 的關(guān)系存在) GD2 4
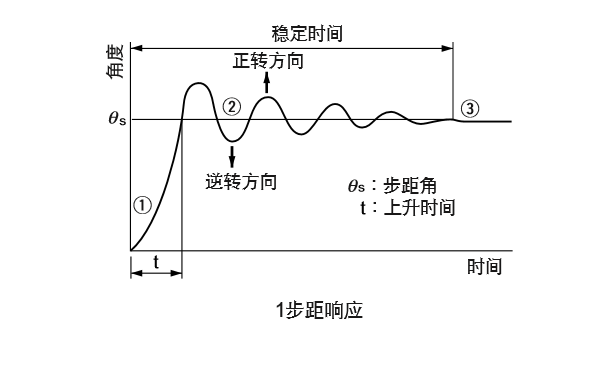
◇振動(dòng)特性 步進(jìn)電動(dòng)機(jī)以連續(xù)的步距狀態(tài)邊移動(dòng)邊重復(fù)運(yùn)轉(zhuǎn)。其步距狀態(tài)的移 動(dòng)會(huì)產(chǎn)生如下所示的 1 步距響應(yīng)。
q 停止?fàn)顟B(tài)的步進(jìn)電動(dòng)機(jī)輸入 1 脈沖時(shí),會(huì)朝下一個(gè)步距角進(jìn)行加 速。 w 加速后的電動(dòng)機(jī)通過步距角并超過某個(gè)角度后,則會(huì)朝反方向被 拉回。 e 如此般衰減振動(dòng)后,將于既定的步距角度位置上停止下來
●電磁制動(dòng)
保持電動(dòng)機(jī)位置的機(jī)械式制動(dòng)。本公司采用因停電等造成電源中斷 時(shí)可立即自動(dòng)保持電動(dòng)機(jī)位置的無勵(lì)磁動(dòng)作型電磁制動(dòng)。
●齒隙 為減速機(jī)或聯(lián)軸器上的間隙。齒隙角度的范圍是無法控制的,愈小 愈容易執(zhí)行高精度定位。本公司備有無齒隙的諧波減速機(jī)、PN 減 速機(jī)或齒隙較小的 PL 減速機(jī)、TH 減速機(jī)。
●脈沖輸入方式 以脈沖指令方式控制 CW、CCW 的運(yùn)轉(zhuǎn)方向。有單脈沖(1P)輸入 方式與雙脈沖(2P)輸入方式。單脈沖輸入方式是依據(jù)脈沖信號(hào)與 運(yùn)轉(zhuǎn)方向信號(hào)產(chǎn)生的方式。雙脈沖輸入方式是在 CW 方向輸入 CW 脈沖,在 CCW 方向輸入 CCW 脈沖的方式。
●光耦合器(ON、OFF) 光耦合器是將電信號(hào)轉(zhuǎn)換為光進(jìn)行傳動(dòng)的,輸入與輸出是采取電氣 絕緣的方式, 具有不易受干擾的特性。本公司的定義為驅(qū)動(dòng)器內(nèi)部 的光耦合器(晶體管)通電狀態(tài)時(shí)為「ON」,驅(qū)動(dòng)器內(nèi)部的光耦合 器(晶體管)非通電狀態(tài)時(shí)為「OFF」。
OFF ON光 耦合器狀態(tài)
●微步 這是利用控制流入電動(dòng)機(jī)線圈的電流,將步距角細(xì)分化,實(shí)現(xiàn)高分 辨率的技術(shù)步距角是非常小的,所以不會(huì)因步進(jìn)驅(qū)動(dòng)產(chǎn)生振動(dòng),實(shí) 現(xiàn)低振動(dòng)、低噪音。
●下降 將負(fù)載從上向下帶動(dòng)的工作稱為下降運(yùn)行。對(duì)電動(dòng)機(jī)而言,因?yàn)闀?huì) 受重力而產(chǎn)生被帶動(dòng)的情形,所以若使用伺服電動(dòng)機(jī)時(shí)將會(huì)產(chǎn)生發(fā) 電機(jī)功能,可能造成驅(qū)動(dòng)器的損壞,所以必須加裝再生電路。步進(jìn) 電動(dòng)機(jī)或 因是與脈沖同步轉(zhuǎn)動(dòng)的,所以下降時(shí)也可執(zhí)行速 度控制。
●勵(lì)磁原點(diǎn) 指勵(lì)磁程序處于初始的狀態(tài)。5 相步進(jìn)電動(dòng)機(jī)每轉(zhuǎn)動(dòng) 7.2°時(shí),便到 初始狀態(tài)。
●勵(lì)磁程序 步進(jìn)電動(dòng)機(jī)是依照決定的組合與順序讓電流流入電動(dòng)機(jī)線圈產(chǎn)生旋 轉(zhuǎn)的。電流流入電動(dòng)機(jī)線圈的順序稱為勵(lì)磁程序。因電動(dòng)機(jī)或勵(lì)磁 方式的種類而異。
●勵(lì)磁定時(shí)信號(hào) 表示勵(lì)磁程序?yàn)槌跏紶顟B(tài)的信號(hào),為一驅(qū)動(dòng)器上的功能。電動(dòng)機(jī)每 轉(zhuǎn)動(dòng) 7.2°即輸出一次。因此,5 相整步時(shí)為每 10 脈沖,半步時(shí)為 每 20 脈沖輸出一次。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論