 電子發燒友App
電子發燒友App


電液伺服閥頻率測試
電液流量伺服閥頻率特性定義為:控制電流在某個頻率范圍內做正弦變化時,閥的空載控制流量對控制電流的復數比。因伺服閥內部含有多種非線性環節,伺服閥的性能又受外界環境條件影響,因此規定伺服閥的頻率特性應在標準試驗條件及控制電流峰間值為50%額定輸入信號下測定。
設伺服閥的傳遞函數為G(s),伺服閥的頻率特性為G(jω)=G(s)|s=jω,G|(jω)|表示頻率特性的幅值,∠G(jω)表示頻率特性的相角。當對閾值恒定的、頻率在某一范圍內變化的正弦信號,便可以得到G|(jω)|和∠G(jω)變化情況,分別稱為伺服閥的幅頻特性和相頻特性。也可以對伺服閥輸入某一幅值的階躍信號,相應地測取伺服閥輸出的階躍響應,然后用傅氏變換方法求出伺服閥頻率響應。目前,生產廠家一般用正弦輸入法來測取伺服閥頻率特性。由于伺服閥的瞬時流量很難直接測取,一般用動態液壓缸間接測取。設伺服閥的流量為q,動態液壓缸的活塞面積為Ap,活塞運動速度為y,顯然有如下關系:

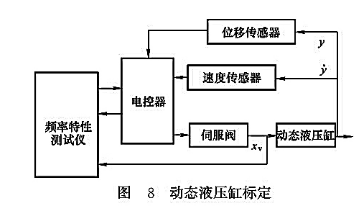
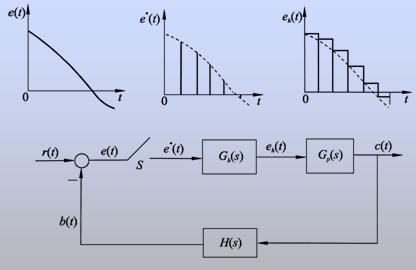
活塞運動速度與伺服閥流量成比例,可以用活塞運動速度變化代表閥輸出流量變化,在工程上測取活塞運動速度是很易實現的。用輸入正弦信號測試伺服閥頻率特性框圖如圖5所示。
?
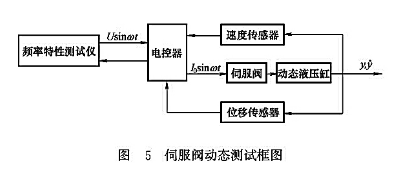
(1)頻率特性測試。頻率特性測試儀具有以下作用:①向電控器發出幅值恒定的、頻率按某一步長遞增的正弦信號;②接收動態液壓缸的速度信號;③將發出信號和接收信號進行數據處理,顯示出閥的幅值響應和相位響應。
(2)電控器的功能和要求。電控器的功能和要求如下:①接受頻率特性測試儀發出的正弦信號,給伺服閥發出相應幅值恒定的電流正弦信號,使伺服閥作相應正弦響應;②接收動態液壓缸位移y信號,使伺服閥、動態液壓缸構成閉環位置控制回路;③接收動態液壓缸的速度y信號,經適當放大后直接輸給動態測試儀。
電控器位置回路的作用是:在動態測試過程中使活塞運動的平均位置始終處于動態液壓缸的中位,或接近于中位的某一位置,這樣在測試過程中不會發生撞缸現象,同時也提高了測試精度。電控器內的位置反饋信道應是低通濾波型的,濾波轉折頻率應≤0.5Hz。對≤0.2Hz范圍的信號,位置回路實現閉環控制功能,大于上述頻率,反饋回路實質是“開”的,位置閉環變成位置開環。只有在開環條件下測試,才能得到真實的伺服閥頻率響應。位置閉環回路應有適宜的回路增益,使在測試過程中活塞的平均位置始終能保持在某一位置,從而使測試結果更精確可靠,這一點十分重要。通常伺服閥的動態測試結果一致性不是很好,原因之一就是在測試過程中活塞位置定位不好。因為速度傳感器的磁場在軸線方向上的分布雖然是恒定的,但卻不均等。在測試過程中如活塞的定位浮動,就有可能使前后兩次檢測的速度信號不是唯一恒定的,因而導致動態測試數據一致性不好。電控器的功率放大器應設計成深度電流反饋型,而且具有足夠大的功率,這樣在寬廣的頻率范圍內的測試過程中才能滿足要求:在高達數百赫茲頻率的測試范圍內,伺服閥的動態特性不受閥線圈電感影響,輸給閥的正弦信號也不會失真,電控器人口輸入電壓與閥輸入電流標定值與閥的線圈電阻無關。
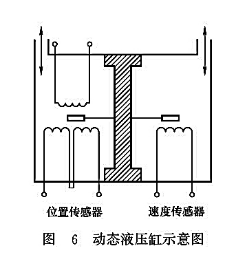
(3)動態液壓缸。動態液壓缸的活塞運動摩擦力、質量m及內漏應盡可能小,活塞容腔Vt盡可能小,應參照圖6結構原理進行設計。
活塞頭與缸筒之間的密封可以不采用密封件密封,用高精度間隙密封。如采用密封件密封,密封件的壓縮量不宜取大,采用結構合理低摩擦因數的密封件。位移傳感器和速度傳感器應設計成內置式,沉浸在液壓缸的左、右兩腔內。活塞兩端無外伸活塞桿,這將避免通常結構的桿密封和桿端支撐。按這種結構設計動態液壓缸的摩擦力和運動件的質量應該是很小。
?
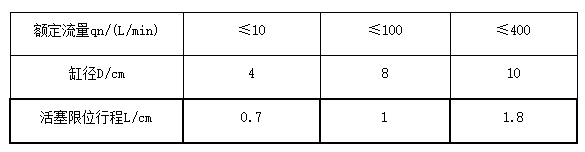
動態液壓缸的主要結構尺寸是液壓缸缸徑D和活塞限位行程L,D、L大小與待試伺服閥額定流量qn大小有關。下面的設計計算公式是基于活塞容腔為最小原則下推導出來的。
設活塞在伺服閥驅動下做正弦運動,活塞行程為y,低頻時振幅為y0,則有
式中:ω為正弦運動頻率,Hz。
相應地活塞運動速度為
設伺服閥的額定流量為qn,檢測頻率特性時輸給伺服閥電流信號峰值為0.5iN,iN為閥的額定電流,則在初始低頻時閥的流量峰值為0.5qn,于是式(2)成立
?
檢測頻率特性時,往往取初始頻率為5Hx。頻率為5Hz時,圖5的位置回路實際上處于斷開狀態。此外,伺服閥頻率響應一般都很高,頻率5Hz時輸出幅值基本沒有衰減,因此,起始頻率為5Hz是合理的。把起始頻率5Hz代八式(2),則有
這是閥的額定流量qn、缸徑D和初始振幅y0的關系式。設計計算時將已知閥的額定流量qn、初步選定的缸徑D代入式(3),便可求出活塞初始頻率點的初始振幅y0。活塞的限位行程L應滿足L≥y0,推薦取L=y0。
推薦常用的不同流量動態液壓缸參數見下表。
?
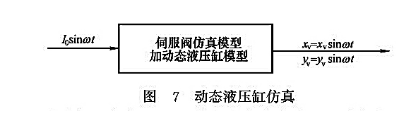
按圖7所示模型進行數字仿真。取不同的輸出狀態參量,即閥心位移xv幅值和動態液壓缸活塞運動速度y幅值分別與輸入幅值為I0的正弦電流信號相比較,得出伺服閥閥心xv(輸出的頻率響應)和動態液壓缸活塞運動速度y(輸出的頻率響應)是一致的,這說明活塞等運動件的質量和活塞容腔對伺服閥真實頻率響應的影響很小。按表3尺寸設計出來的動態液壓缸,不會給檢測結果帶來誤差。
為保證伺服閥頻率特性測試的可信度,需對一種新設計的動態液壓缸或外購的動態液壓缸,或使用時間很長后動態液壓缸的檢測可信度進行標定,標定方法如下:
用電反饋電液流量伺服閥代替一般電液流量伺服閥裝到動態液壓缸上。動態液壓缸缸徑小的,采用二級電反饋電液流量伺服閥;缸徑大的,采用三級電液流量伺服閥。標定動態液壓缸的信號傳遞框圖如圖8所示。圖8中電控器功能與圖5中的電控器功能一樣,只不過此處電控器輸出信號為電壓,而圖5為電流。圖中的閥心位移x,信號是從電反饋伺服閥的內裝放大器反饋通道中引出。可見伺服閥的頻率特性可同時從兩個不同輸出信號檢測出:①從動態液壓缸的輸出速度信號y;②從伺服閥的閥心位移信號xv檢測出。如果兩者測出的頻率特性一致,說明用該動態液壓缸檢測頻率特性是可信的;如果兩者檢測出的頻率特性不一致且相差較大,說明用該動態液壓缸檢測頻率特性不可信,應查明原因,予以排除。
?
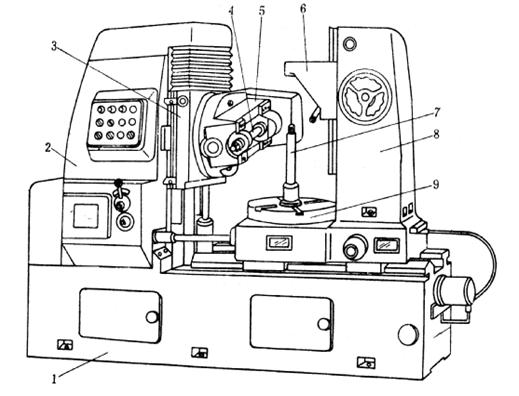
電液伺服閥結構圖
圖所示為一種典型的電液伺服閥的結構原理。力矩馬達由一對永久磁鐵1、一對導磁體2、銜鐵3、線圈4和彈簧管5組成。雙噴嘴擋板閥構成了前置放大器;功率放大器為四邊滑閥。銜鐵3、彈簧管5與噴嘴擋板閥的擋板6連接在一起,擋板末端為小球狀,嵌放在滑閥8的中間凹槽內,構成反饋桿傳遞滑閥對力矩馬達的反饋力。
?
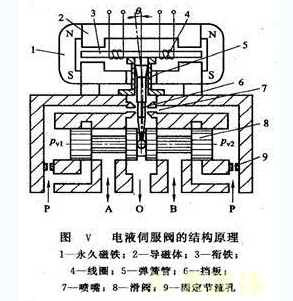
其工作原理如下:當線圈中無信號電流輸入時,銜鐵、擋板和滑閥都處于中間對稱位置,如圖所示。當線圈中有信號電流輸入時,銜鐵被磁化,與永久磁鐵和導磁體形成的磁場,合成產生電磁力矩,使銜鐵連同擋板偏轉θ角,擋板的偏轉使兩噴嘴與擋板之間的縫隙發生相反的變化,滑閥閥芯兩端壓力pv1、pv2也發生相反的變化,一個壓力上升,另一個壓力下降,從而推動滑閥閥芯移動。閥芯移動的同時使反饋桿產生彈性變形,對銜鐵擋板組件產生一反力矩。當作用在銜鐵擋板組件上的電磁力矩與彈簧管反力矩、反饋桿反力矩達到平衡時,滑閥停止移動,保持在一定的開口上,并有相應的流量輸出。由于銜鐵、擋板的轉角、滑閥的位移都與信號電流成比例變化,在負載壓差一定時,閥的輸出流量也與輸入電流成比例。當輸入信號電流反向時,輸出油液的方向也發生改變。所以,這是一種流量控制電液伺服閥。












 工商網監
工商網監
評論