 電子發(fā)燒友App
電子發(fā)燒友App


無刷電機(jī)具有使其成為速度控制的優(yōu)秀電機(jī)的特性。在本節(jié)中,我們將介紹提高這些電機(jī)性能的技術(shù)。
5.1 寬 速控制范圍(低速運(yùn)行)
我們將解釋用于使無刷電機(jī)在低速下平穩(wěn)運(yùn)行的技術(shù)。
5.1.1 低齒槽效應(yīng)設(shè)計
當(dāng)步進(jìn)電機(jī)軸處于非通電狀態(tài)時,用手指旋轉(zhuǎn)時感覺到的脈動振動稱為齒槽轉(zhuǎn)矩。
無刷電機(jī)在其轉(zhuǎn)子中使用永磁體,存儲在轉(zhuǎn)子和定子之間氣隙中的磁能根據(jù)轉(zhuǎn)子位置而變化。轉(zhuǎn)子齒和定子齒彼此定位的角度反復(fù)改變磁能;沿途產(chǎn)生齒槽轉(zhuǎn)矩。如果使用具有高能量積的磁鐵,也會產(chǎn)生高齒槽轉(zhuǎn)矩。
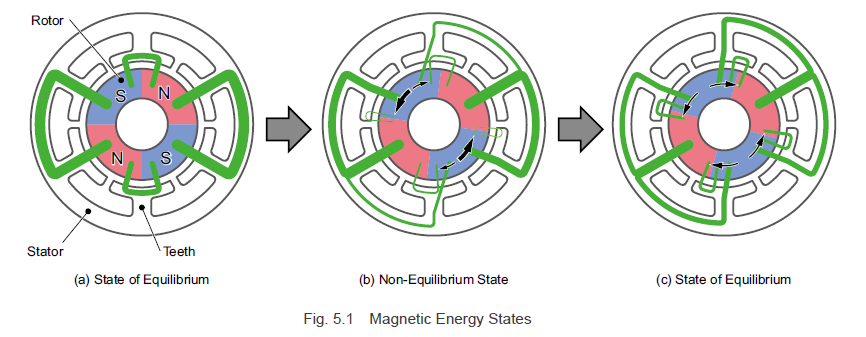
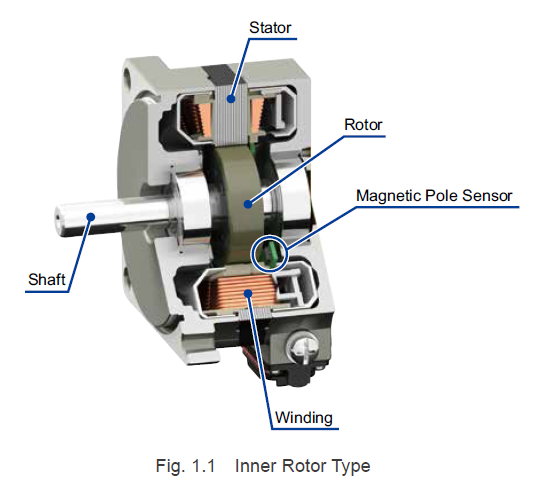
我們現(xiàn)在將使用具有 4 個轉(zhuǎn)子極和 6 個定子槽的電機(jī)示例來解釋轉(zhuǎn)子角度和磁能狀態(tài),如圖 5.1 所示。
轉(zhuǎn)子磁鐵中產(chǎn)生的磁通量沿著綠線所示的路徑穿過定子的鐵芯,從北極流向南極。線的粗細(xì)反映了磁通量的大小,線向中心的曲率反映了磁能的不平衡狀態(tài)。此時,在磁通量試圖流動的方向(由黑色箭頭指示)在轉(zhuǎn)子中產(chǎn)生力,以便它可以變直,或直接對齊。
在圖 5.1(a)所示的狀態(tài)下,所有的磁通量都指向中心,每個槽的磁能很平衡。在圖 5.1(b)所示的狀態(tài)下,轉(zhuǎn)子順時針旋轉(zhuǎn) 7.5°,面向南極的齒之間的磁能失去平衡,產(chǎn)生方向和大小與黑色相匹配的扭矩箭頭。
力矩方向相反,但逆時針方向產(chǎn)生力矩,產(chǎn)生的力矩較大。在圖 5.1(c)所示的狀態(tài)下,轉(zhuǎn)子又順時針旋轉(zhuǎn)了 7.5°,面向南極的齒之間的磁能失去平衡,并在黑色箭頭指示的方向上產(chǎn)生扭矩. 在這種狀態(tài)下產(chǎn)生的轉(zhuǎn)矩被沿相反方向行進(jìn)的相同大小的轉(zhuǎn)矩抵消,并且不產(chǎn)生齒槽轉(zhuǎn)矩。
電機(jī)運(yùn)行時也會產(chǎn)生齒槽轉(zhuǎn)矩。
電機(jī)在運(yùn)行時,作為負(fù)載轉(zhuǎn)矩的變化,表現(xiàn)出平穩(wěn)運(yùn)行,因此在磁設(shè)計時需要保持較低。到目前為止,已經(jīng)對降低齒槽轉(zhuǎn)矩的方法進(jìn)行了大量研究。
降低齒槽轉(zhuǎn)矩的主要方法有:
適當(dāng)數(shù)量的齒與適當(dāng)數(shù)量的磁極組合
使轉(zhuǎn)子磁體排列或磁體對角線磁化(轉(zhuǎn)子傾斜)
層壓定子使其扭曲(定子歪斜)
優(yōu)化磁鐵和定子的形狀
優(yōu)化磁體磁化波形
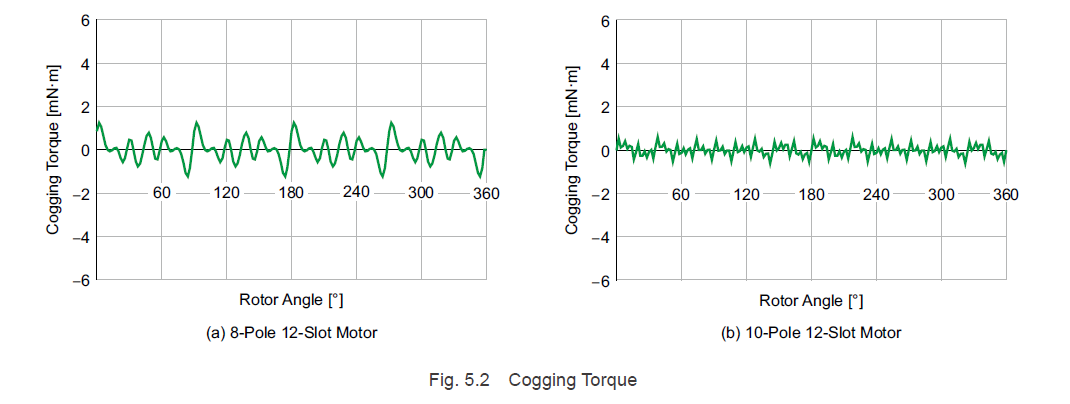
將適當(dāng)數(shù)量的齒與適當(dāng)數(shù)量的磁極組合是抵消齒槽轉(zhuǎn)矩的最有效方法。 一般情況下,電機(jī)每轉(zhuǎn)的齒槽轉(zhuǎn)矩周期為磁極數(shù)和齒數(shù)中最小的公倍數(shù)。另外,最小公倍數(shù)越大,齒槽轉(zhuǎn)矩越小。
圖 5.2 比較了 8 極 12 槽電機(jī)和 10 極 12 槽電機(jī)的齒槽轉(zhuǎn)矩。8 極 12 槽電機(jī)每轉(zhuǎn)的齒槽轉(zhuǎn)矩周期數(shù)為 24,10 極 12 槽電機(jī)為 60。10 極 12 槽電機(jī)產(chǎn)生的循環(huán)很好,齒槽轉(zhuǎn)矩幅度明顯減小。
Oriental Motor 的無刷電機(jī)為 10 極 12 槽型。
5.1.2 正弦波驅(qū)動
利用正弦波驅(qū)動降低了轉(zhuǎn)矩脈動的幅度,即使在低速旋轉(zhuǎn)時也可以平穩(wěn)運(yùn)行。雖然在“3.2.2 正弦波驅(qū)動系統(tǒng)”中解釋了原理,但在這里我們將解釋構(gòu)成該原理關(guān)鍵的先決條件。
A。作用在繞組上的磁通密度
作用在繞組上的磁通密度理想情況下應(yīng)該是變化的,使之成為真正的正弦曲線,如式(3.2)所示。如果正弦波發(fā)生畸變,電機(jī)就會產(chǎn)生轉(zhuǎn)矩脈動,從而引起速度脈動。
為磁通密度創(chuàng)建理想波形的方法與降低齒槽轉(zhuǎn)矩的方法相同,包括以下內(nèi)容:
齒數(shù)與磁極數(shù)的最佳組合
應(yīng)用轉(zhuǎn)子偏斜或定子偏斜
優(yōu)化磁鐵和定子的形狀
優(yōu)化磁體磁化波形
然而,由于降低齒槽轉(zhuǎn)矩的形狀與允許獲得最佳磁通分布的形狀不同,因此磁路的設(shè)計需要考慮平衡。
b. 電機(jī)電流由正弦波組成
如式(3.6)所示,理想情況下流過電機(jī)的電流為正弦波。與磁通密度一樣,如果發(fā)生畸變,就會產(chǎn)生轉(zhuǎn)矩脈動,進(jìn)而引起速度脈動。為了創(chuàng)建理想的電流波形,需要精細(xì)和準(zhǔn)確地檢測轉(zhuǎn)子磁極位置。在Oriental Motor,通過使用軟件對霍爾效應(yīng)IC信號進(jìn)行間歇處理,能夠獲得高分辨率的轉(zhuǎn)子磁極位置信息。
5.1.3 速度檢測精度
無刷電機(jī)使用速度計算器將來自霍爾效應(yīng) IC 的信號轉(zhuǎn)換為轉(zhuǎn)速并獲取有關(guān)電機(jī)速度的信息。電機(jī)低速運(yùn)行時,霍爾效應(yīng) IC 的信號檢測間隔變寬,如圖 5.4 所示,電機(jī)速度檢測值呈周期性變化。如果反饋的速度檢測值有脈動,速度控制器的電壓(電流)指令就會產(chǎn)生脈動,從而導(dǎo)致電機(jī)速度產(chǎn)生脈動。
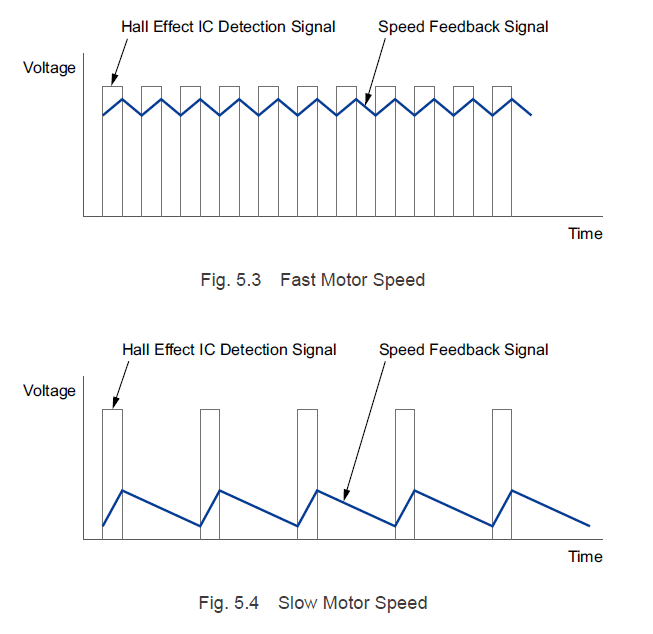
Oriental Motor的無刷電機(jī)通過將轉(zhuǎn)子磁極數(shù)從4個增加到10個,將霍爾效應(yīng)IC信號頻率提高了2.5倍。這使得低速運(yùn)行時的反饋信號平滑,減少了電機(jī)中的紋波速度。
由于無刷電機(jī)使用傳感器來檢測磁極,因此它們不適合低速運(yùn)行。但是,隨著磁分析技術(shù)、軟件信號處理技術(shù)和驅(qū)動技術(shù)的改進(jìn),最低運(yùn)行速度已從4極電機(jī)的300轉(zhuǎn)/分降低到80轉(zhuǎn)/分。 此外,即使在最低速度下輸出扭矩也恒定,因此可以在較寬的速度范圍內(nèi)實(shí)現(xiàn)平穩(wěn)的旋轉(zhuǎn)控制。
5.2 寬 速度控制范圍(高速 運(yùn)行)
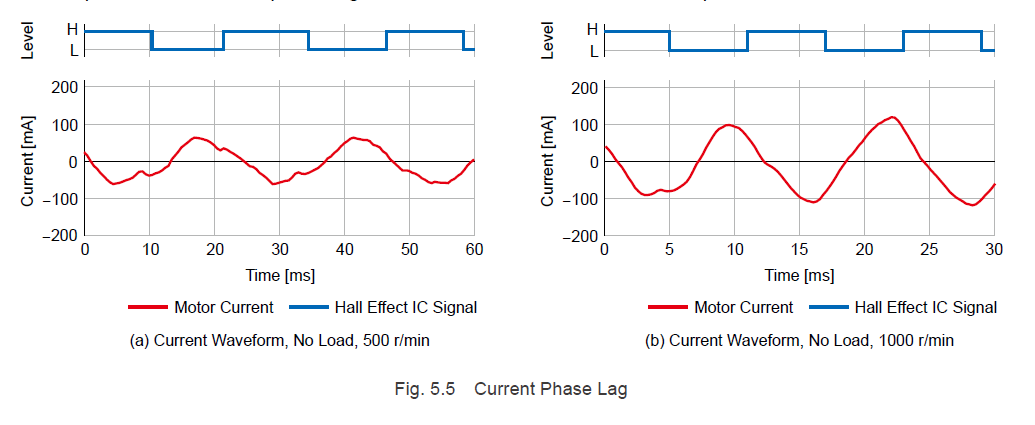
霍爾效應(yīng)IC信號波形和電機(jī)電流波形如圖5.5所示。
與 500 RPM 相比,關(guān)于霍爾效應(yīng) IC 信號,在 1000 RPM 時可以觀察到電流波形滯后和電機(jī)電流增加。
對無刷電機(jī)進(jìn)行驅(qū)動時,根據(jù)霍爾效應(yīng) IC 信號和勵磁模式向繞組施加電壓。但是,如果轉(zhuǎn)速增加,則由于電機(jī)電感,電流相位會出現(xiàn)滯后。 電流相位中出現(xiàn)的滯后對電機(jī)中產(chǎn)生的扭矩產(chǎn)生無效電磁力,從而降低有效電磁力。由于電機(jī)執(zhí)行控制以保持轉(zhuǎn)速,因此電流增加并產(chǎn)生必要的扭矩。此外,如果速度增加,相位滯后增加,旋轉(zhuǎn)停止。
現(xiàn)在我們將解釋用于校正電流相位滯后的方法,這是使高速操作成為可能所必需的。
5.2.1 相位控制輸出轉(zhuǎn)矩校正
超前角控制允許通過根據(jù)電機(jī)速度計算電流相位滯后并提前電壓相位來校正輸出扭矩。
電壓相位超前的值稱為“超前角” a,可以使用以下公式計算:
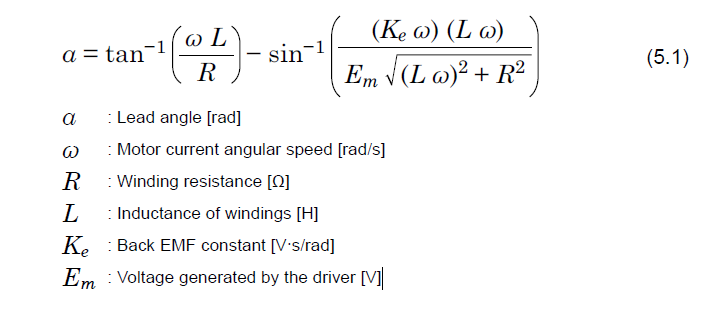
然而,執(zhí)行如此復(fù)雜的計算需要具有高處理能力的CPU。因此,不直接使用公式進(jìn)行計算,而是使用超前角的近似公式進(jìn)行計算。
超前角與轉(zhuǎn)速的關(guān)系如圖5.6所示。在超前角較大的區(qū)域。由于它相對于轉(zhuǎn)速幾乎呈線性變化,因此可以使用線性近似公式來表示超前角與轉(zhuǎn)速之間的關(guān)系。
同樣,超前角與外加電壓的關(guān)系也可以表示為線性近似,因此可以根據(jù)轉(zhuǎn)速和外加電壓計算出超前角。
然而,由于僅使用線性近似會導(dǎo)致在低速、高負(fù)載操作期間由于過度的相位超前而導(dǎo)致效率和轉(zhuǎn)矩降低。實(shí)際上,對超前角值施加了限制。
這種控制系統(tǒng)的優(yōu)點(diǎn)是電路配置簡單,因?yàn)椴恍枰娏鳝h(huán),并且電機(jī)控制調(diào)節(jié)元件很少。
5.2.2 矢量控制
矢量控制是利用數(shù)學(xué)技術(shù)將流過三相電動機(jī)繞組的電流轉(zhuǎn)換成與直流電動機(jī)等效的模型,從而簡化控制的一種控制方法。
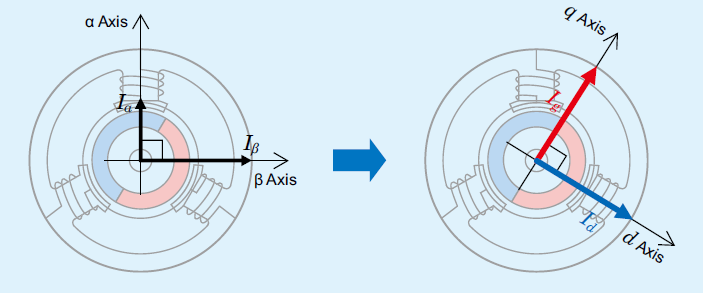
流經(jīng)無刷電機(jī) U、V 和 W 相的電流由于電機(jī)扭矩和轉(zhuǎn)子旋轉(zhuǎn)角度而不斷變化。在這些條件下,電流控制的計算處理很困難。但是,通過將三相電流轉(zhuǎn)換為兩相電流,將固定坐標(biāo)轉(zhuǎn)換為旋轉(zhuǎn)坐標(biāo),可以將電流分為產(chǎn)生扭矩的分量(電流的 q 軸分量)和產(chǎn)生磁通量的分量分量(電流的 d 軸分量),與轉(zhuǎn)子旋轉(zhuǎn)角度無關(guān)。
在這種狀態(tài)下,通過構(gòu)建一個電流回路,從產(chǎn)生轉(zhuǎn)矩的 q 軸分量和產(chǎn)生磁通量的 d 軸分量的電流中獲取檢測值,并遵守指令值,輸出轉(zhuǎn)矩和通過的磁通量通過繞組(磁鏈)可以隨意控制。
由于可以分別控制輸出轉(zhuǎn)矩和磁鏈,因此可以高度響應(yīng)地控制輸出轉(zhuǎn)矩和速度。
此外,通過控制磁鏈,可以實(shí)現(xiàn)節(jié)能操作的最大效率控制。還可以改善速度-轉(zhuǎn)矩特性,例如最大轉(zhuǎn)矩控制和弱磁控制。
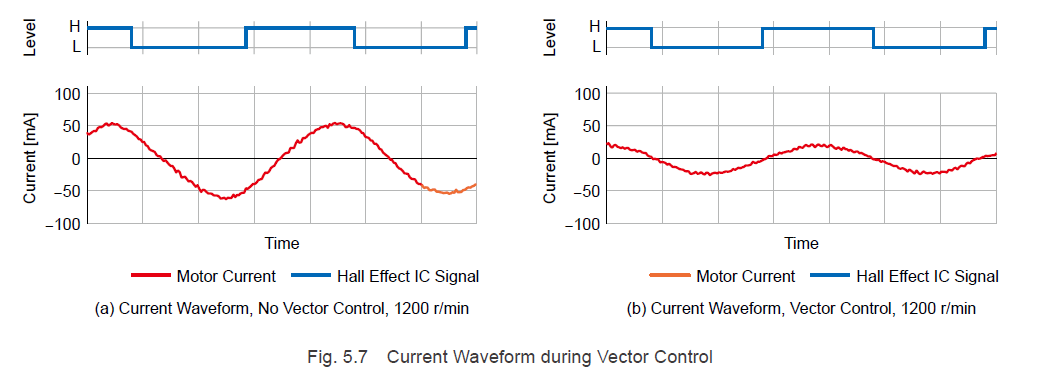
通過矢量控制改善電流波形的例子如圖 5.7 所示。圖 5.7(a) 為無矢量控制時的電流波形,圖 5.7(b) 為有矢量控制時的電流波形。在驅(qū)動電路中,電機(jī)電流受到控制,使其通過霍爾效應(yīng) IC 輸出信號的上升沿從負(fù)切換為正。
在沒有矢量控制的情況下,可以觀察到電機(jī)電流滯后。
在圖5.7(b)中,霍爾效應(yīng)IC信號上升沿與電流切換一致,電流相位滯后消失。此外,執(zhí)行矢量控制會使電機(jī)電流值變小。
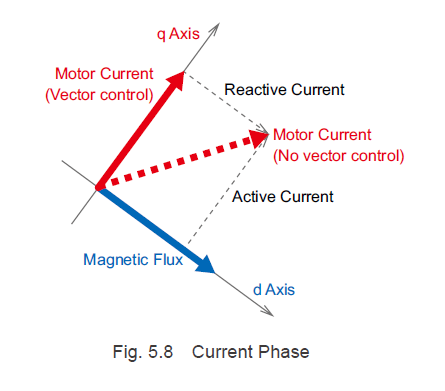
將圖 5.7 所示的矢量控制狀態(tài)和無矢量控制狀態(tài)顯示為使用旋轉(zhuǎn)坐標(biāo)的電流矢量創(chuàng)建如圖 5.8 所示的圖形 l(逆時針旋轉(zhuǎn)時)。
不進(jìn)行矢量控制時,相對于磁通相位的定向(紅色虛線所示)小于 90°。電機(jī)電流除了起轉(zhuǎn)矩作用的有功電流(電流的q軸分量)分量外,還包括不起轉(zhuǎn)矩作用的無功電流分量。
執(zhí)行矢量控制時,電流相對于磁通量以 90° 的方向流動。利用矢量控制始終保持磁通和電流方向?yàn)?0°,消除高速運(yùn)行時的電流相位滯后和無功電流,實(shí)現(xiàn)高效運(yùn)行。
TIP : 矢量控制原理
1. 檢測電機(jī)電流值Iw、Iv、Iw。
2.將三相電流值轉(zhuǎn)換為正交2軸2相電流值[克拉克變換]。

值Ia和Ib隨每個轉(zhuǎn)子角度而變化。
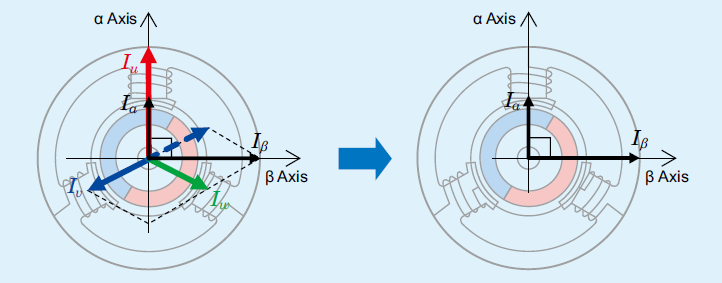
3. 對于兩相電流值,將坐標(biāo)系從固定坐標(biāo)變換為與轉(zhuǎn)子同步旋轉(zhuǎn)的旋轉(zhuǎn)坐標(biāo)[Park變換]。
通過變換坐標(biāo)系,使d軸方向固定在磁場方向上,就可以將電流當(dāng)作直流電,就像直流電機(jī)有旋轉(zhuǎn)導(dǎo)體一樣,使計算變得更加簡單。

值 Id 和 Ia 是與轉(zhuǎn)子角度 θ 無關(guān)的常數(shù)。
4. 將實(shí)際的Id(電流的d軸分量)和Iq(電流的q軸分量)與指令值進(jìn)行比較,找出差異。
5. 控制電流環(huán)中的施加電壓,使電流指令值與Id和Iq匹配。
5.2.3 弱磁控制
弱磁控制是指通過控制電流的d軸分量,使產(chǎn)生磁通量的部分(磁場)的磁通量減弱,從而提高電機(jī)高速運(yùn)轉(zhuǎn)時的轉(zhuǎn)矩。
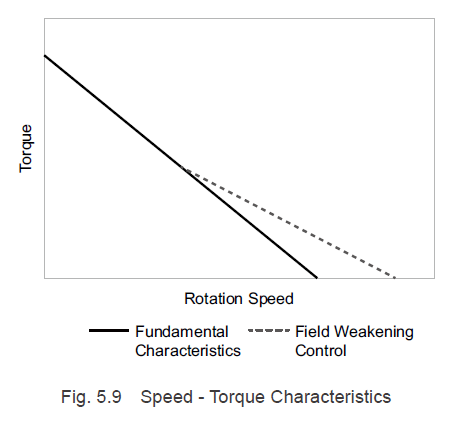
無刷電機(jī)的基本特性是傾斜轉(zhuǎn)矩特性,如圖 5.9 所示。電機(jī)中產(chǎn)生的轉(zhuǎn)矩與電機(jī)電流成正比,因此轉(zhuǎn)速越高,電流值越小。我們將在下面解釋其原因。
無刷電機(jī)旋轉(zhuǎn)時各區(qū)域的電壓用下式表示。
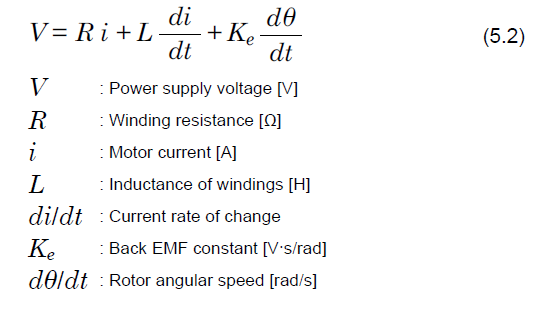
式(5.2)左邊表示施加電壓,右邊第一項是施加在繞組電阻上的電壓,第二項是電感分量產(chǎn)生的電壓,第三項是反電動勢。
由式(5.2)得:

如式(5.3)所示,如果電機(jī)轉(zhuǎn)速增加,電感分量會導(dǎo)致壓降增加,反電動勢升高,電機(jī)電流減小。因此,無刷電機(jī)的速度-轉(zhuǎn)矩特性為如圖5.9所示的傾斜特性。
通過在高速運(yùn)轉(zhuǎn)時進(jìn)行弱磁控制,使電流流向d軸的負(fù)方向,弱化磁場的磁通量,可以降低繞組中產(chǎn)生的反電動勢。
因?yàn)楫?dāng)反電動勢減小時電流變大,所以產(chǎn)生的轉(zhuǎn)矩增加。這允許擴(kuò)大高速運(yùn)行期間使用的速度范圍(圖 5.9)。
5.3 高精度 速度控制
5.3.1 調(diào)速
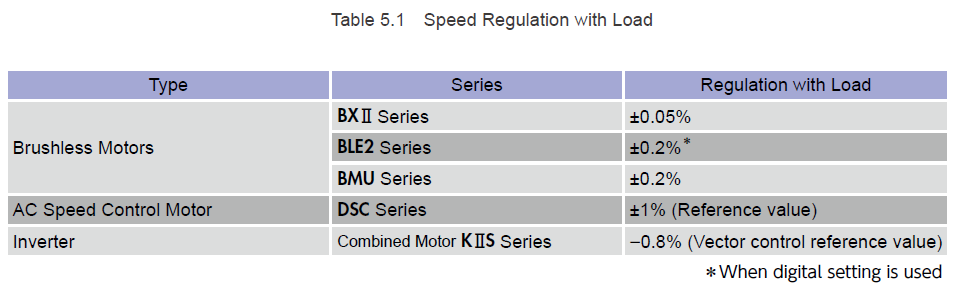
速度調(diào)節(jié)是用于速度控制的電機(jī)的重要規(guī)格。定義為電機(jī)以設(shè)定速度運(yùn)行時,負(fù)載轉(zhuǎn)矩、電源電壓、環(huán)境溫度等使用環(huán)境因素發(fā)生變化時,速度的變化率。
Oriental Motor 的規(guī)格使用以下條件發(fā)生變化時額定轉(zhuǎn)速下的速度變化率。因此,如果額定轉(zhuǎn)速為 3000 r/min,速度調(diào)節(jié)為 +/-0.2%,則速度變化為 +/-6 RPM。
由于速度波動范圍取決于傳感器檢測精度,即使運(yùn)行速度不是 3000 r/min,速度變化量仍可能約為 +/-6 RPM(在電機(jī)軸處)。
With Load:當(dāng)施加額定負(fù)載時,假設(shè)為空載狀態(tài)
With Voltage:當(dāng)電壓在允許范圍內(nèi)變化時,假設(shè)為額定電壓
With Temperature:當(dāng)溫度在環(huán)境工作溫度范圍內(nèi)變化時,假設(shè)環(huán)境溫度為 25°C。
無刷電機(jī)閉環(huán)控制電機(jī)轉(zhuǎn)速;基于從霍爾效應(yīng) IC 信號計算的反饋速度。 由于轉(zhuǎn)子的多極性,來自霍爾效應(yīng)IC的信號數(shù)量增加,提高了轉(zhuǎn)速的檢測精度,從而導(dǎo)致低速調(diào)節(jié),并允許以接近指令速度的速度運(yùn)行。
對于沒有速度檢測器并執(zhí)行無傳感器速度控制的變頻器 (VFD),轉(zhuǎn)速會隨著額定轉(zhuǎn)矩的變化而變化。
由于精確的速度調(diào)節(jié),可以通過具有可變負(fù)載和重量的輸送機(jī)穩(wěn)定運(yùn)行,例如液體粘度變化的攪拌器或排放泵等。此外,這適用于涂裝、加熱和其他需要固定處理時間的運(yùn)輸應(yīng)用。
提示:速度調(diào)節(jié)和顫振特性之間的差異
除速度調(diào)節(jié)外,顫振特性是電機(jī)速度穩(wěn)定性的另一個特性。
Speed Regulation:使用環(huán)境變化時產(chǎn)生的平均速度波動率
Flutter Characteristic : 勻速旋轉(zhuǎn)時平均速度的速度波動率。
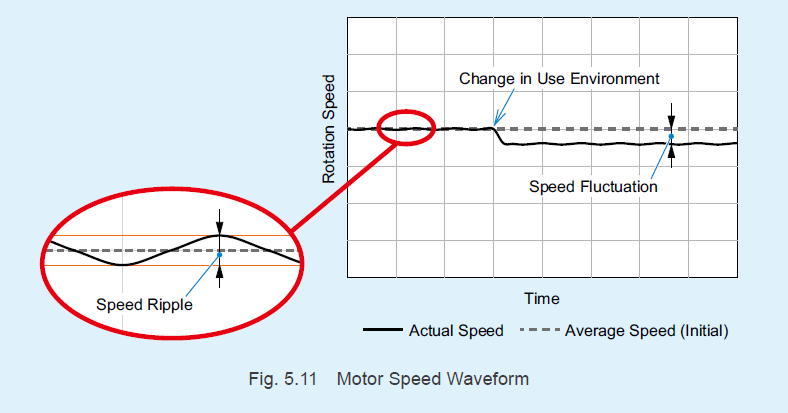
速度波動是指電機(jī)本身的平均速度在變化,而速度脈動是指在平均速度一定的情況下,速度變化的實(shí)際幅度。
速度波動是由電機(jī)單次旋轉(zhuǎn)或執(zhí)行速度控制期間的轉(zhuǎn)矩波動產(chǎn)生的。在圖像檢測設(shè)備上表現(xiàn)為畫面抖動,在鍍膜設(shè)備上表現(xiàn)為鍍膜不一致。
5.3.2 高可靠性
此外,通過利用過載信息和過載警告功能,可以在過載警報激活之前檢測到負(fù)載增加。 這可以防止生產(chǎn)線突然停止并進(jìn)行系統(tǒng)維護(hù)。 我們之前解釋過,由于無刷電機(jī)根據(jù)霍爾效應(yīng) IC 信號計算出的反饋速度在閉環(huán)中控制電機(jī)速度,因此速度調(diào)整率低,可以穩(wěn)定運(yùn)行。
由于始終監(jiān)控電機(jī)速度,如果由于某種原因施加過大負(fù)載導(dǎo)致速度降低,或者如果電機(jī)停止,則會輸出警報信號,從而可以檢測到故障。
5.4 穩(wěn)定停止位置
在進(jìn)行高精度定位作業(yè)時,一般采用步進(jìn)電機(jī)和伺服電機(jī),定位精度優(yōu)良。但是,根據(jù)要求的精度和使用方法的不同,使用廉價的調(diào)速電機(jī)或交流電機(jī),即使是簡單的定位動作,也有可能滿足定位精度的要求。
當(dāng)需要在目標(biāo)位置停止輸送物體和旋轉(zhuǎn)物體時,使用具有瞬時停止功能的速度控制器和驅(qū)動器。但是,為了檢測搬運(yùn)物,需要在停止位置設(shè)置傳感器,通過可編程控制器等進(jìn)行控制。
輸入停止信號時,由于轉(zhuǎn)子轉(zhuǎn)動慣量和負(fù)載轉(zhuǎn)動慣量的作用,電機(jī)超速停止。此時,超程量根據(jù)裝置中摩擦轉(zhuǎn)矩的大小而減少。
5.4.1 超限額
DSC 系列 25 W 交流調(diào)速電機(jī)和 BLE2 系列 30 W 無刷電機(jī)的制動特性如圖 5.12 所示。
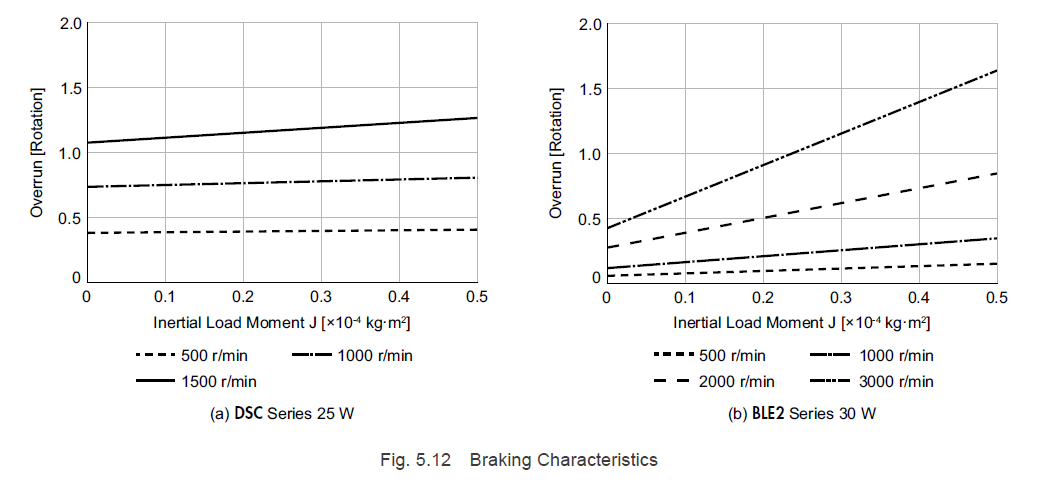
這些制動特性表示無摩擦負(fù)載時負(fù)載慣性力矩與超限量(平均值)之間的關(guān)系。由于在高速或大慣性負(fù)載下旋轉(zhuǎn)能量較大,因此超程量也會增加。
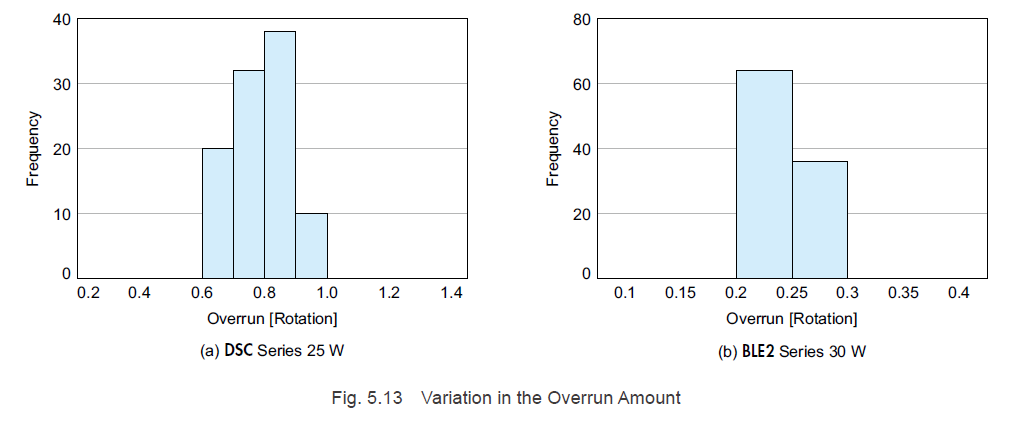
5.4.2 超支量的變化
交流調(diào)速電機(jī)和無刷電機(jī)的超限量都有差異。圖 5.13 顯示了當(dāng)負(fù)載慣性力矩 J 設(shè)置為 0.251 x 10^-4 kg-m2,轉(zhuǎn)速設(shè)置為 1000 r/min 時電機(jī)重復(fù)運(yùn)行和制動 100 次時超程量的變化。
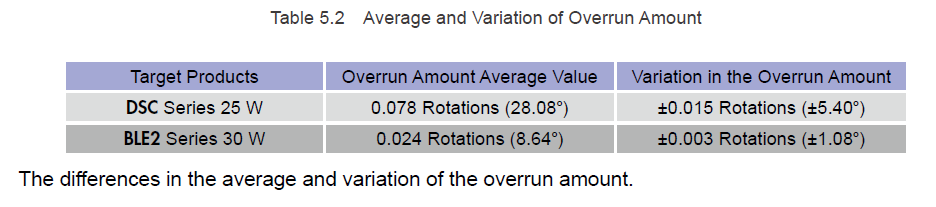
許多交流調(diào)速電機(jī)和無刷電機(jī)都與減速機(jī)組合使用。
例如,與減速比為 10 的減速機(jī)組合時,在齒輪軸上測得的平均超程量及其變化量將減小到表 5.2 中所示的值。但是,應(yīng)將齒輪中 1° 至 2° 的齒隙添加到這些值中。
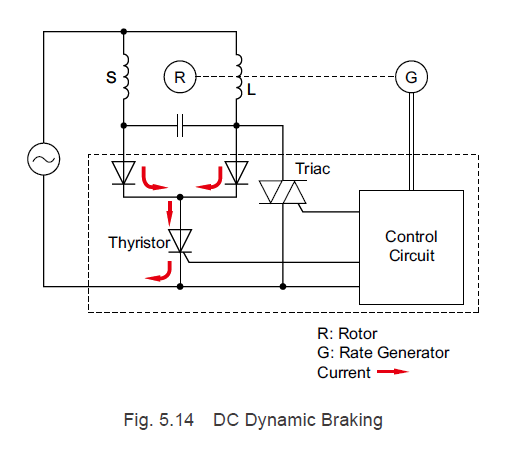
5.4.3 交流調(diào)速電機(jī)制動方式
交流速度控制電機(jī)通過基于雙向晶閘管的觸發(fā)角控制來控制施加到電機(jī)的電壓。當(dāng)輸入制動信號時,雙向晶閘管斷開,晶閘管導(dǎo)通一段固定的時間。如圖5.14中紅色箭頭所示,二極管中流過電機(jī)主繞組(L)和輔助繞組(S)經(jīng)過半波整流的同相電流。這會導(dǎo)致執(zhí)行直流制動(AKA 動態(tài)制動),從而立即停止電機(jī)。
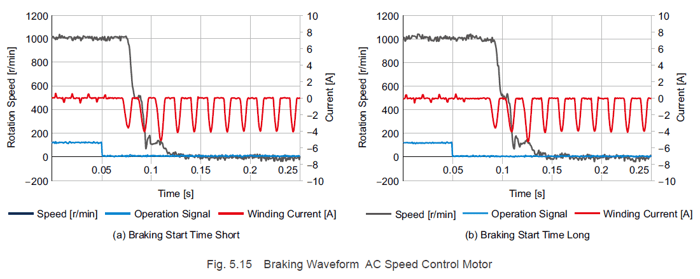
由于制動信號在電源電壓階段輸入的時序,制動電流開始流動的時間(制動開始時間)最多滯后于電源頻率一個周期。因此,超限額會發(fā)生變化。
運(yùn)行信號、制動電流和電機(jī)轉(zhuǎn)速之間的關(guān)系如圖 5.15 所示。比較左右圖可知,從運(yùn)轉(zhuǎn)信號OFF(制動信號ON)到制動開始、電機(jī)停止為止,有一個電源頻率周期的間隔。
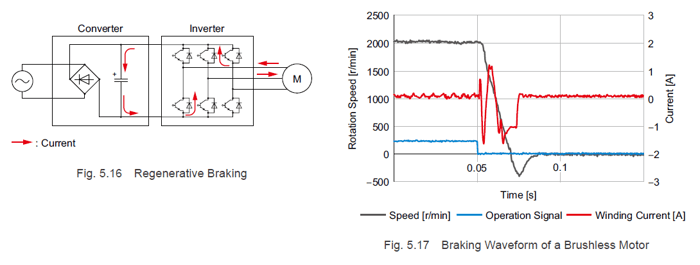
5.4.4 無刷電機(jī)制動方式
如“4.5 制動(再生運(yùn)行)”中所述,無刷電機(jī)在制動過程中作為發(fā)電機(jī)工作,通過將旋轉(zhuǎn)能量轉(zhuǎn)換為電能來產(chǎn)生制動扭矩,如圖 5.16 所示。觀察圖 5.17 可知,運(yùn)轉(zhuǎn)信號 OFF(制動信號 ON)后,再生電流直接流過繞組。由于在電源電壓階段不受制動信號輸入時序的影響,可以產(chǎn)生制動力矩,因此停止位置穩(wěn)定。
審核編輯:湯梓紅











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論