設(shè)計(jì)了基于COMX和STM32的機(jī)器人伺服控制器解決方案。首先介紹了COMX模塊的功能及結(jié)構(gòu),然后設(shè)計(jì)了基于FSMC的接口電路來(lái)控制COMX。
2014-10-17 13:43:43 2634
2634 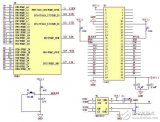
TRINAMIC 運(yùn)動(dòng)控制發(fā)布了TMC4671---全球首款全集成伺服控制器集成電路,為BLDC / PMSM和2相步進(jìn)電機(jī)以及DC電機(jī)和音圈提供現(xiàn)場(chǎng)定向控制。
2018-06-19 16:14:0814840 論述伺服驅(qū)動(dòng)控制器的實(shí)現(xiàn)方法,通過(guò)對(duì)ARM+FPGA+DSP架構(gòu)的多CPU控制器的具體分析將其原理和優(yōu)勢(shì)展現(xiàn)出來(lái);這種架構(gòu)控制器系統(tǒng)分工明確,提高了算法的實(shí)時(shí)性;提高了控制器對(duì)外接口EtherCAT
2022-09-20 15:34:351776 在本教程中,我們將了解伺服電機(jī)以及如何將伺服與 MSP430 連接。MSP-EXP430G2 是德州儀器提供的開(kāi)發(fā)工具,又名 LaunchPad,用于學(xué)習(xí)和練習(xí)如何使用其微控制器。該板屬于 MSP430 超值系列類別,我們可以在其中對(duì)所有 MSP430 系列微控制器進(jìn)行編程。
2022-11-14 16:33:002166 
伺服一體機(jī)的主要特點(diǎn)是:高密度、體積小、適于網(wǎng)絡(luò)控制和具有更高的可靠性。它內(nèi)含:控制器內(nèi)核和功率驅(qū)動(dòng)器內(nèi)核,通過(guò)dcbus和網(wǎng)絡(luò)接口與外部建立聯(lián)系,既能自主運(yùn)行又能受控于網(wǎng)絡(luò),能以分布式形態(tài)構(gòu)成任意復(fù)雜的大型精密控制系統(tǒng)。
2019-10-30 06:10:36
伺服控制器故障處理資料
2023-05-05 22:54:06
伺服電機(jī)控制器為何要整定?何時(shí)需要整定?
2021-09-29 06:11:22
伺服電機(jī)控制器與步進(jìn)電機(jī)控制器有啥不一樣?
2021-02-25 07:42:10
實(shí)驗(yàn)11伺服電機(jī)控制器設(shè)計(jì)實(shí)驗(yàn)了解伺服電機(jī)的應(yīng)用領(lǐng)域,掌握伺服電機(jī)的速度控制模式、伺服電機(jī)的位置控制模式。文章目錄程序設(shè)計(jì)伺服電機(jī)的速度控制模式代碼講解main.ctimer.c伺服電機(jī)的位置控制
2021-06-28 08:59:56
DMA控制器的主要用途是什么?GPIO引腳的I/O端口有何作用?
2022-01-25 06:59:37
`FANUC伺服控制器回收發(fā)那科配件回收,發(fā)那科軸卡回收,發(fā)那科CPU回收,發(fā)那科電源回收,回收FANUC伺服,F(xiàn)ANUC伺服器,F(xiàn)ANUC數(shù)控系統(tǒng),發(fā)那科主軸放大器,F(xiàn)ANUC主軸模塊,F(xiàn)ANUC
2021-06-25 11:33:16
Labview 軟件讀取伺服控制器數(shù)據(jù),要求讀取速度不小于1K/s,電腦和控制器網(wǎng)線連接,請(qǐng)問(wèn)哪種通訊方式可以達(dá)到,請(qǐng)朋友們指導(dǎo)一下,非常感謝。
2017-06-21 21:10:35
TMCM1636伺服驅(qū)動(dòng)控制器有何功能?TMCM1636伺服驅(qū)動(dòng)控制器有哪些應(yīng)用?
2021-10-08 08:32:46
申請(qǐng)理由:之前公司使用的28034,現(xiàn)在想用一個(gè)新片子用于雙電機(jī)控制項(xiàng)目描述:控制一個(gè)伺服電機(jī)與一個(gè)步進(jìn)電機(jī),通過(guò)六路pwm控制伺服電機(jī),八路pwm控制步進(jìn)電機(jī),用于縫紉機(jī)控制器。
2015-09-10 11:12:20
三菱伺服控制器所有的報(bào)警代碼以及處理方法是什么?
2021-11-15 06:40:55
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時(shí)PLC還沒(méi)運(yùn)行呢),控制器和電機(jī)都已經(jīng)測(cè)試好了
2023-12-11 07:00:33
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動(dòng)控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動(dòng)器 ?
2021-06-28 08:03:17
回收FANUC放大器,F(xiàn)ANUC控制器回收伺服驅(qū)動(dòng)器回收發(fā)那科控制器/FANUC,,回收發(fā)那科放大器, FANUC放大器回收,發(fā)那科控制器回收,發(fā)那科示教器回收,發(fā)那科放大器回收,回收發(fā)那科放大器
2021-03-05 16:48:44
目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會(huì)大打折扣,因此以FPGA為控制核心,對(duì)應(yīng)用于機(jī)載三軸伺服控制平臺(tái)的控制器進(jìn)行了設(shè)計(jì)與優(yōu)化。
2019-07-16 07:41:04
目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會(huì)大打折扣,因此以FPGA為控制核心,對(duì)應(yīng)用于機(jī)載三軸伺服控制平臺(tái)的控制器進(jìn)行了設(shè)計(jì)與優(yōu)化。
2019-07-08 06:28:36
您好,我更新了一個(gè)庫(kù),以使用 ESP8266 微控制器控制來(lái)自 tossen robotics 的 dynamixel AX-12 數(shù)字伺服系統(tǒng)。
該庫(kù)最初來(lái)自 arbotiX,并于 2009 年由
2023-05-23 07:00:43
運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來(lái)越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度和靈活性,可實(shí)時(shí)完成運(yùn)動(dòng)控制過(guò)程中復(fù)雜
2019-08-06 06:27:00
無(wú)錫匯灃工控有限公司回收安川伺服驅(qū)動(dòng)器,回收松下伺服驅(qū)動(dòng)器,回收松下伺服控制器,回收松下伺服驅(qū)動(dòng)器,回收三菱Q系列PLC可編程控制器Q06HCPU,回收三菱電機(jī)Q系列PLC可編程控制器Q06HCPU
2021-01-17 17:42:48
怎樣去設(shè)計(jì)三軸伺服控制器?如何對(duì)三軸伺服控制器的性能進(jìn)行測(cè)試?
2021-04-28 06:04:11
探索伺服電機(jī)控制器電路
2019-10-16 07:49:27
海天注塑機(jī)伺服控制器故障代碼表.doc海天注塑機(jī)伺服控制器故障代碼表.doc錯(cuò)誤信息顯示數(shù)值描述E.busE.dOHE.dSPE.PrFE.PrrE.hybE.EncE.LSFE.OCE.OHE.OH2E.nOHE.OLE.OL2E.nOLE.OPE.OSE.PuCE.SetE.UP189514647523215483036165317110549392Error,bus, 串行通訊錯(cuò)誤Error...
2021-09-03 08:27:59
隨著電液伺服控制理論的發(fā)展, 很多先進(jìn)的控制策略被應(yīng)用于電液伺服控制領(lǐng)域中。
2019-09-24 08:21:27
伺服電機(jī)的主要應(yīng)用領(lǐng)域是什么?什么是伺服電機(jī)的速度控制模式?什么是伺服電機(jī)的位置控制模式?
2021-06-28 09:06:45
運(yùn)動(dòng)控制器控制伺服電機(jī)的指令方式運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
作者:何國(guó)軍 陳維榮 劉小強(qiáng) 孫叢君運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來(lái)越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度
2019-07-31 08:15:26
馬鞍山發(fā)那科控制器回收,發(fā)那科伺服器回收,聯(lián)系***發(fā)那科電機(jī)回收,發(fā)那科控制器回收,發(fā)那科系統(tǒng)回收,發(fā)那科編碼器回收,發(fā)那科顯示器回收,發(fā)那科顯卡回收,發(fā)那科軸卡回收,發(fā)那科CPU回收,發(fā)那科電源
2020-10-20 09:35:01
溫度伺服控制系統(tǒng)是數(shù)碼變溫空調(diào)的一個(gè)重要的子系統(tǒng),是數(shù)碼變溫空調(diào)的執(zhí)行機(jī)構(gòu)。本文根據(jù)數(shù)碼變溫空調(diào)的工作原理,提出了一種基于ARM 微控制器的全數(shù)字式溫度伺服控制系統(tǒng)
2009-07-07 15:09:26 27
27 本文在簡(jiǎn)要介紹IMS 系列伺服控制器的基礎(chǔ)上,討論了控制器的RS-232C 通信協(xié)議,并詳細(xì)闡述了如何在C++ Builder 5.0 中利用MSComm 控件實(shí)現(xiàn)控制器與上位機(jī)之間的串行通信,最后舉一
2009-08-17 09:48:5310 目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會(huì)大打折扣,因此以FPGA為控制核心,對(duì)應(yīng)用于
2010-09-24 08:56:181099 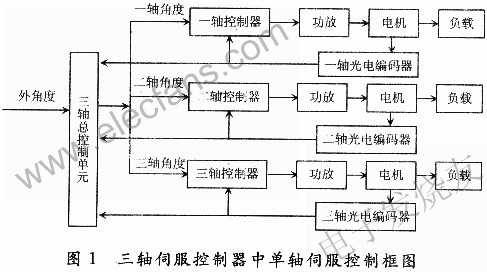
Elmo公司的Whistle系列數(shù)字伺服控制器,體積小、重量輕、提供數(shù)字輸入與輸出接口,提供RS232與CAN總線2種通信方式,
2010-12-24 10:14:541165 
摘要! 在DVD循軌伺服控制系統(tǒng)中#碟片的偏心會(huì)對(duì)循軌誤差信號(hào)TE產(chǎn)生周 期性的擾動(dòng)$ 為了有效抑制該干擾DVD循軌伺服控制系統(tǒng)引入了重復(fù)控制器$ 在穩(wěn)定性條件的基礎(chǔ) 上設(shè)計(jì)重復(fù)控制器
2011-03-30 15:40:4432 文 章提出了一種適用于 交流伺服 系統(tǒng)的控制器的動(dòng)態(tài)設(shè)計(jì)方法。該方法將線形控制理論中的動(dòng)態(tài)設(shè)計(jì)方法與滑模控制有機(jī)地結(jié)合起來(lái).形成了一套完善、系統(tǒng)的滑棋控制器的設(shè)計(jì)方法。
2011-07-22 18:08:1845 為解決模擬電路在 伺服控制 系統(tǒng)中存在的器件漂移、抗干擾能力差、變量不易監(jiān)視等諸多不足,對(duì)某船載衛(wèi)通站伺服環(huán)路模擬控制器進(jìn)行了分析,提出計(jì)算機(jī)控制代替模擬控制的方法
2011-08-29 15:13:1643 針對(duì)傳統(tǒng)工業(yè)機(jī)器人系統(tǒng)的局限性.提出了一種高實(shí)時(shí)性的機(jī)器人視覺(jué)伺服控制系統(tǒng)。系統(tǒng)利用Ahera公司的Nios11軟核設(shè)計(jì)一個(gè)機(jī)器人實(shí)時(shí)目標(biāo)跟蹤控制器。控制器由Nios II作為處理器.采
2011-11-07 14:49:1355 基于模糊PID控制的導(dǎo)彈舵機(jī)伺服控制器-2011。
2016-04-05 16:32:3542 基于自適應(yīng)模糊PID算法的切紙機(jī)伺服控制器設(shè)計(jì)-2010。
2016-04-06 09:52:5915 模糊PID技術(shù)在高速液壓伺服控制器中的應(yīng)用研究。
2016-04-06 11:21:2418 一種新型模糊PID控制器在伺服系統(tǒng)的應(yīng)用-2009。
2016-04-06 14:07:279 基于自抗擾控制器的交流直線永磁同步伺服電機(jī)速度控制系統(tǒng)。
2016-04-25 10:00:2716 基于矢量控制的高性能交流電機(jī)速度伺服控制器的FPGA實(shí)現(xiàn)
2016-04-26 10:03:3126 三菱PLC(可編程邏輯控制器)編程實(shí)例項(xiàng)目例程-伺服控制貼標(biāo)機(jī)
2022-03-22 16:36:11202 PMSM伺服系統(tǒng)速度環(huán)PI控制器參數(shù)自整定及優(yōu)化_肖啟明
2017-01-07 16:52:0616 根據(jù)伺服系統(tǒng)的特點(diǎn)并結(jié)合PID控制算法設(shè)計(jì)了一種位置前饋控制器
2017-09-16 09:08:2120 基于DSP_CPLD的四電動(dòng)舵機(jī)伺服控制器設(shè)計(jì)
2017-10-20 08:24:044 TRINAMIC公司推出TMCM-1633-CANopen,這是一種新型緊湊型300W BLDC伺服控制器模塊,具有與工業(yè)標(biāo)準(zhǔn)CANopen協(xié)議兼容的正弦換向功能。
2017-12-01 10:31:2510408 伺服驅(qū)動(dòng)器是用來(lái)控制伺服電機(jī)的一種控制器,一般是通過(guò)位置、速度和力矩3種方式對(duì)電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的系統(tǒng)定位。目前,伺服控制器CPU的架構(gòu)主要有:1)單CPU架構(gòu)ARM( acorn RISC
2018-01-29 16:33:531 氣動(dòng)伺服技術(shù)具有清潔、功率質(zhì)量比大、維護(hù)簡(jiǎn)便等優(yōu)勢(shì),在機(jī)器人、醫(yī)療機(jī)械等場(chǎng)合應(yīng)用廣泛。本課題采用課題組現(xiàn)有高性能控制算法原型,加以改進(jìn)后,研發(fā)了集成先進(jìn)控制策略的氣動(dòng)伺服控制器,測(cè)試表明是國(guó)內(nèi)高性能
2018-01-30 18:00:522 伺服定位控制可以在PLC中實(shí)現(xiàn),也可以在伺服控制器中實(shí)現(xiàn)。用PLC實(shí)現(xiàn),可選用317-T的工藝型CPU,內(nèi)置定位控制功能。PLC通過(guò)通訊向伺服發(fā)送速度指令,并將伺服的反饋取到PLC中,在PLC中實(shí)現(xiàn)
2018-02-01 15:17:0410170 本文檔內(nèi)容介紹了基于STM32簡(jiǎn)易電機(jī)伺服控制器,供參考
2018-03-05 11:29:04110 伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡(jiǎn)易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來(lái)解析下伺服電機(jī)與伺服控制器。
2018-07-04 10:52:4242703 目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,伺服控制器是用來(lái)控制伺服馬達(dá)的一種器件,一般是通過(guò)位置、速度和力矩三種方式對(duì)伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。 從結(jié)構(gòu)上看,伺服控制器和變頻器差不多,但對(duì)元器件的要求精度和可靠性更高。
2018-10-07 11:41:413897 
步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2018-09-16 09:48:192770 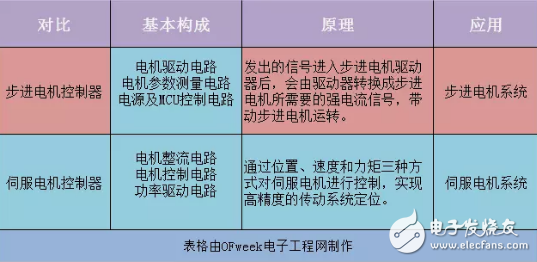
這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動(dòng)器完成。日系伺服和國(guó)產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡(jiǎn)單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2710987 技術(shù)需知伺服電機(jī)調(diào)試的基本步驟, 運(yùn)動(dòng)控制器控制伺服電機(jī)通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號(hào)
2020-06-12 14:45:485452 市面上的伺服驅(qū)動(dòng)器CPU的架構(gòu)主要有單ARM控制器和單DSP控制器。單ARM控制器方案在通信和控制方面存在優(yōu)勢(shì),但是復(fù)雜算法在實(shí)現(xiàn)的時(shí)候往往會(huì)因?yàn)檫\(yùn)算耗時(shí)而降低整個(gè)系統(tǒng)實(shí)時(shí)性;單DSP控制器方案中在算法中存下優(yōu)勢(shì),但是在對(duì)外通信和控制方面往往會(huì)實(shí)現(xiàn)起來(lái)比較復(fù)雜。
2019-08-20 09:26:333749 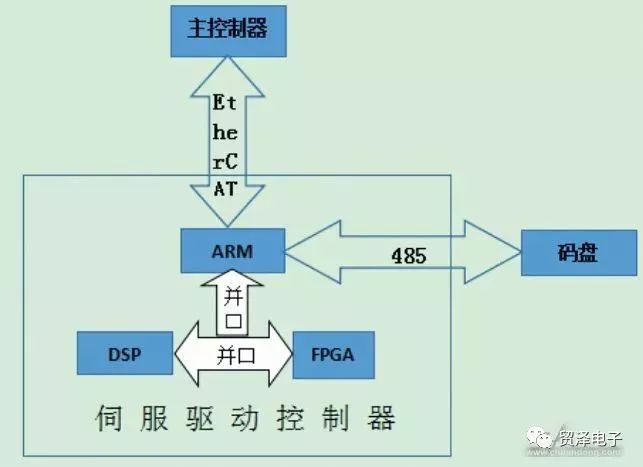
伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過(guò)位置、速度和力矩三種方式對(duì)伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。
2019-07-26 14:35:4314365 伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過(guò)位置、速度和力矩三種方式對(duì)伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。 伺服控制相關(guān)技術(shù)已經(jīng)成為關(guān)系國(guó)家裝備技術(shù)水平的重要參考。
2019-10-01 09:28:003967 此電路的電路圖實(shí)驗(yàn)如下所示。伺服器的控制輸入來(lái)自PIC16F628A微控制器的RB1引腳,該P(yáng)IC16F628A微控制器使用外部陶瓷諧振器以4.0 MHz的頻率工作。輕觸開(kāi)關(guān)連接到RB0引腳,以提供用戶輸入來(lái)控制伺服臂的位置。該實(shí)驗(yàn)的操作部分在下面的軟件部分中進(jìn)行介紹。
2019-12-05 17:54:203932 利用 VHDL 硬件描述語(yǔ)言在 FPGA 中設(shè)計(jì)直流伺服電機(jī)控制器。其含 4 路 PWM 控制器,每個(gè)控制器均分配一個(gè) ID,當(dāng)?shù)刂肪€ Address 選中某個(gè) ID 時(shí),表明對(duì)該 PWM 控制器
2020-05-11 08:00:0013 伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡(jiǎn)易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來(lái)解析下伺服電機(jī)與伺服控制器。
2020-09-24 10:54:3412382 
介紹了一種用基于FPGA的DSP技術(shù)來(lái)設(shè)計(jì)電液伺服系統(tǒng)控制器的方法。該方法克服了傳統(tǒng)伺服控制器的一些不足, 可將許多復(fù)雜的實(shí)時(shí)控制算法硬件化實(shí)現(xiàn), 并根據(jù)控制效果的優(yōu)劣調(diào)整控制算法, 從而
2020-11-30 14:02:002194 
步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2020-12-14 20:26:091309 伺服電機(jī)控制器做為伺服電機(jī)的機(jī)械設(shè)備控制器是十分重要的,主要是根據(jù)伺服電機(jī)控制器的實(shí)際操作對(duì)伺服電機(jī)開(kāi)展操縱期限精密度極高的傳動(dòng)裝置。那麼伺服電機(jī)控制器在安裝流程及其常見(jiàn)問(wèn)題有什么呢? 1.安裝方向
2021-01-12 16:17:19874 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2021-01-31 06:17:2415 許多人對(duì)伺服電機(jī)控制器的原理一直不理解,不知道它是如何控制的。事實(shí)上看相關(guān)介紹也可以知道看起來(lái)特別簡(jiǎn)單,真正了解就知道不是這么回事。以下小編介紹其中的原理。 常用的伺服控制系統(tǒng)軟件是閉環(huán)控制
2021-07-11 15:22:496624 眾所周知, 直流伺服電機(jī) 控制器和編碼器是組成伺服控制系統(tǒng)的必要部件,直流伺服電機(jī)控制器主要通過(guò)讀取編碼器來(lái)獲得:伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速大小、轉(zhuǎn)子位置、轉(zhuǎn)子角度。可完成伺服電機(jī)轉(zhuǎn)速、電機(jī)轉(zhuǎn)速大小、轉(zhuǎn)角位置
2021-08-27 14:55:533655 隨著公司低壓直流伺服電機(jī)控制器的銷量增加,客戶反饋伺服控制器速度開(kāi)環(huán)和速度閉環(huán)區(qū)別不是很明白,現(xiàn)對(duì)客戶反饋的速度閉環(huán)問(wèn)題匯總整理及解決方案如下。
2021-09-08 09:16:552171 交流伺服神經(jīng)元PID控制器研究(深圳市澳萊特電源技術(shù)有限公司)-該文檔為交流伺服神經(jīng)元PID控制器研究總結(jié)文檔,是一份不錯(cuò)的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,,,,
2021-09-22 15:09:1911 伺服電機(jī)在各種自動(dòng)化生產(chǎn)項(xiàng)目里比較常見(jiàn),各種機(jī)械臂、AGV車的活動(dòng)機(jī)構(gòu),都是伺服電機(jī)在扮演。伺服電機(jī)和以往的其他電機(jī)相比,采用了閉環(huán)控制,即接收到控制器的控制脈沖后,在電機(jī)運(yùn)動(dòng)的同時(shí),也會(huì)生
2022-06-08 10:06:171325 伺服電機(jī)在各種自動(dòng)化生產(chǎn)項(xiàng)目里比較常見(jiàn),各種機(jī)械臂、AGV車的活動(dòng)機(jī)構(gòu),都是伺服電機(jī)在扮演。伺服電機(jī)和以往的其他電機(jī)相比,采用了閉環(huán)控制,即接收到控制器的控制脈沖后,在電機(jī)運(yùn)動(dòng)的同時(shí),也會(huì)生成一個(gè)脈沖。
2022-06-08 10:20:371440 電子發(fā)燒友網(wǎng)站提供《藍(lán)牙伺服控制器.zip》資料免費(fèi)下載
2022-07-04 14:34:111 伺服控制器有助于幫助工程師創(chuàng)建滿足當(dāng)前和新興需求的新機(jī)器人設(shè)計(jì)。
2022-08-19 10:31:13297 電子發(fā)燒友網(wǎng)站提供《4伺服燈開(kāi)關(guān)控制器板開(kāi)源分享.zip》資料免費(fèi)下載
2022-08-18 09:41:181 電子發(fā)燒友網(wǎng)站提供《用于說(shuō)話頭骨的Raspberry Pi音頻伺服控制器.zip》資料免費(fèi)下載
2022-11-02 09:30:160 伺服電機(jī)是一種可以通過(guò)控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。因此在很多需要高精度運(yùn)動(dòng)控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:278928 伺服控制器是一種用于控制電機(jī)運(yùn)動(dòng)的高精度電子設(shè)備,主要作用是精確控制電機(jī)的位置、速度和加速度等運(yùn)動(dòng)參數(shù),從而實(shí)現(xiàn)各種運(yùn)動(dòng)控制任務(wù)。伺服控制器通常使用閉環(huán)控制方式,即通過(guò)電機(jī)編碼器或位置傳感器的反饋信號(hào)與期望的控制信號(hào)進(jìn)行比較,從而調(diào)整輸出信號(hào)以控制電機(jī)。
2023-03-09 09:52:061953 伺服控制器的工作原理是通過(guò)反饋控制實(shí)現(xiàn)對(duì)電機(jī)運(yùn)動(dòng)的精確控制。伺服控制器通常使用閉環(huán)控制方式,即將編碼器或位置傳感器的反饋信號(hào)與期望的控制信號(hào)進(jìn)行比較,從而調(diào)整輸出信號(hào)以控制電機(jī)。
2023-03-09 09:54:471165 伺服控制器的參數(shù)設(shè)置涉及到多個(gè)方面,包括電氣參數(shù)、控制參數(shù)、運(yùn)動(dòng)參數(shù)等。下面列舉一些常見(jiàn)的伺服控制器參數(shù)設(shè)置:
電氣參數(shù)設(shè)置:
電機(jī)參數(shù):包括電機(jī)類型、額定電壓、額定電流、額定轉(zhuǎn)速等參數(shù)的設(shè)置和校準(zhǔn)。
驅(qū)動(dòng)器參數(shù):包括電流限制、速度限制、加速度限制等參數(shù)的設(shè)置。
2023-03-12 11:26:304611 伺服控制器的調(diào)試需要根據(jù)具體應(yīng)用場(chǎng)景和控制器型號(hào)進(jìn)行具體設(shè)置和調(diào)整。一般來(lái)說(shuō),伺服控制器的調(diào)試包括以下幾個(gè)方面:
電氣參數(shù)調(diào)整:包括電機(jī)的參數(shù)設(shè)置和校準(zhǔn)、驅(qū)動(dòng)器參數(shù)的設(shè)置、電源的輸出調(diào)整等。這些參數(shù)的設(shè)置需要根據(jù)具體控制器的說(shuō)明書(shū)和應(yīng)用場(chǎng)景進(jìn)行調(diào)整。
2023-03-12 11:31:272128 伺服電機(jī)配合伺服控制器精確控制電機(jī)軸的角位置、速度和加速度。這是通過(guò)帶有解析器(與控制器的模擬通信)或絕對(duì)或增量編碼器(與控制器的數(shù)字通信)的閉環(huán)反饋系統(tǒng)來(lái)實(shí)現(xiàn)的,它提供軸的位置信息和速度。
2023-03-25 17:16:441789 在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的伺服控制,其實(shí)就是對(duì)伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-04-27 17:34:351115 
控制器控制伺服電機(jī)通常采用兩種指令方式:數(shù)字脈沖和模擬信號(hào)。數(shù)字脈沖這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位
2023-05-09 14:43:031011 操縱桿,誰(shuí)不喜歡它!我們想將操縱桿的樂(lè)趣融入到電子設(shè)備中,并設(shè)計(jì)了一個(gè)使用操縱桿控制器控制伺服電機(jī)的電路。伺服電機(jī)具有強(qiáng)大的應(yīng)用,主要以其對(duì)距離和角度的精確控制而聞名。借助伺服數(shù)據(jù)引腳的準(zhǔn)確
2023-06-16 17:31:41408 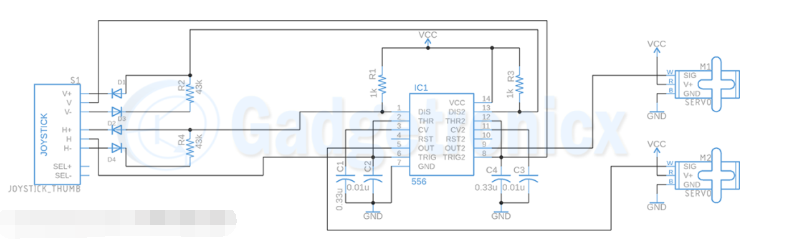
目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會(huì)大打折扣,因此以FPGA為控制核心,對(duì)應(yīng)用于機(jī)載三軸伺服控制平臺(tái)的控制器進(jìn)行了設(shè)計(jì)與優(yōu)化。
2023-09-04 16:53:01331 在自動(dòng)化領(lǐng)域,運(yùn)動(dòng)控制器和基本的伺服驅(qū)動(dòng)器之間存在著微妙的差異。許多應(yīng)用都需要運(yùn)動(dòng)控制器和伺服驅(qū)動(dòng)器共同組成一個(gè)完整的系統(tǒng),因此,掌握每個(gè)設(shè)備的功能和智能水平至關(guān)重要。 ? 伺服系統(tǒng) 伺服驅(qū)動(dòng)器
2023-07-10 10:02:25985 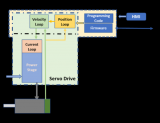
本項(xiàng)目制作了一個(gè)基于RT-Thread+RA6M4的無(wú)刷電機(jī)控制器,可以實(shí)現(xiàn)是無(wú)刷電機(jī)的伺服控制。可以應(yīng)用在小型CNC、人機(jī)交互等場(chǎng)景。
2023-08-02 17:51:42443 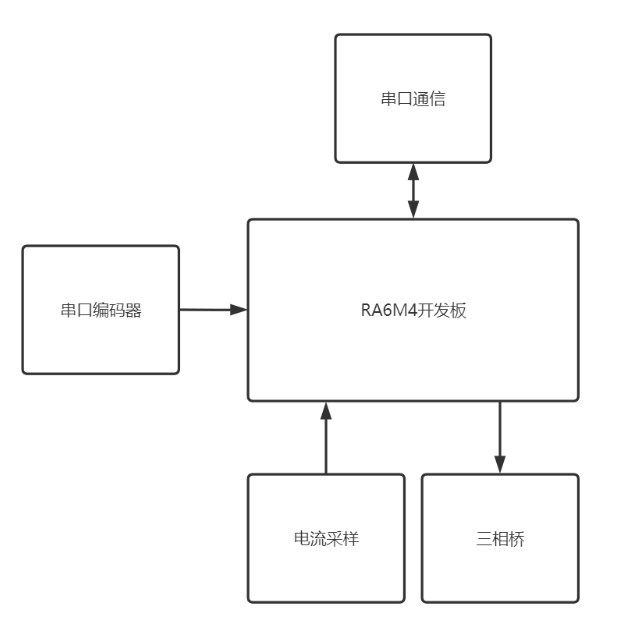
在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-08-09 09:25:28602 電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:10:400 電子發(fā)燒友網(wǎng)站提供《伺服環(huán)路控制器的數(shù)字化設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-26 09:28:050 伺服電機(jī)控制器的類型包括降壓起動(dòng)器、調(diào)速驅(qū)動(dòng)器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式。
2023-11-16 10:26:16269 伺服控制器是一種用于精確控制電機(jī)運(yùn)動(dòng)的電子設(shè)備,通過(guò)接收來(lái)自控制系統(tǒng)的指令以及監(jiān)測(cè)電機(jī)的位置、速度等參數(shù),實(shí)現(xiàn)對(duì)電機(jī)的精確控制。基于高精度、高速度、高可靠性等優(yōu)點(diǎn),在制造業(yè)、航空航天、醫(yī)療設(shè)備等領(lǐng)域
2023-12-14 18:15:01185 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論