旋轉(zhuǎn)時(shí),兩個(gè)信號發(fā)生器即輸出電壓波動(dòng)信號A 和B,如圖7.9(b)所示。信號頻率隨轉(zhuǎn)速而變,但兩者之間的相位差(即初始相位差)θ0 卻是某一常值。當(dāng)扭軸傳遞轉(zhuǎn)矩時(shí),扭軸發(fā)生扭轉(zhuǎn)變形,其兩端的圓盤產(chǎn)生
2017-12-20 17:34:04
)所示。信號頻率隨轉(zhuǎn)速而變,但兩者之間的相位差(即初始相位差)θ0 卻是某一常值。當(dāng)扭軸傳遞轉(zhuǎn)矩時(shí),扭軸發(fā)生扭轉(zhuǎn)變形,其兩端的圓盤產(chǎn)生相對轉(zhuǎn)角φ,使兩信號間的相位關(guān)系發(fā)生變化,如圖7.9(b)中的A 和B
2018-01-19 11:06:12
思考的能力。好了回到正題。轉(zhuǎn)矩給定在哪?轉(zhuǎn)矩的給定在轉(zhuǎn)速環(huán)PI調(diào)節(jié)器的輸出,也是Q軸PI調(diào)節(jié)器的給定,說是轉(zhuǎn)矩給定,其實(shí)是iq給定。 哈哈哈,其實(shí)就是這句話之前么理解,一直覺得轉(zhuǎn)速調(diào)節(jié)器輸出...
2021-08-27 08:03:53
3、轉(zhuǎn)矩電流關(guān)系最大轉(zhuǎn)矩電流比控制方式最重要的是要將上一步中最小定子電流下的Id、Iq與電磁轉(zhuǎn)矩的關(guān)系求出來,轉(zhuǎn)速環(huán)的輸出轉(zhuǎn)矩電流關(guān)系模塊的輸入,轉(zhuǎn)矩電流關(guān)系模塊的輸出作為Id與Iq的給定輸入,最后
2018-09-24 11:25:47
和控制器三部份組成,可用于恒轉(zhuǎn)距負(fù)載場合,特別適宜在遞減轉(zhuǎn)矩負(fù)載中使用,有較明顯的節(jié)能效果。YCT電磁調(diào)速電機(jī)調(diào)速范圍內(nèi)均勻地、連續(xù)地?zé)o級調(diào)速、并能輸出額定轉(zhuǎn)矩,電機(jī)在運(yùn)行中當(dāng)負(fù)載轉(zhuǎn)矩變動(dòng)時(shí)可通過控制器
2020-09-14 10:39:27
神經(jīng)網(wǎng)絡(luò)(RBFNN)算法結(jié)合,實(shí)現(xiàn)了對無數(shù)直流電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩的控制。研究所提出的改進(jìn)的無橋單端初級電感變換器,可用于調(diào)節(jié)比例積分微分(PID)控制器的參數(shù),從而提高無刷直流電機(jī)轉(zhuǎn)矩控制中轉(zhuǎn)速閉環(huán)(PID
2023-03-23 15:11:25
公司的一個(gè)客戶自己選的伺服電機(jī)6.9KW,額定轉(zhuǎn)矩22N.m,他說伺服電機(jī)在50Hz和60Hz的情況下輸出轉(zhuǎn)速都1800r/min,這個(gè)我不能理解,輸出轉(zhuǎn)速和頻率是什么關(guān)系?本人對伺服不懂,三相
2023-03-16 10:50:33
最近在做電機(jī)測試,關(guān)于利用LabVIEW測量
轉(zhuǎn)速轉(zhuǎn)矩的方案,大家都有哪些經(jīng)驗(yàn)?zāi)兀恳黄饋碛懻摚?/div>
2016-12-15 20:53:39
現(xiàn)在的設(shè)備是用ARM做處理器,用一個(gè)自整定PID算法來實(shí)現(xiàn)對轉(zhuǎn)矩轉(zhuǎn)速的控制,但是反應(yīng)速度很慢,從2500轉(zhuǎn)調(diào)到2000轉(zhuǎn),穩(wěn)定時(shí)間要2秒左右。一方面我正在對PID的參數(shù)進(jìn)行進(jìn)一步整定(不過
2015-03-26 16:43:02
如題,想請教各位達(dá)人,風(fēng)機(jī)轉(zhuǎn)速與PWM占空比有什么定量關(guān)系沒?我只知道是正相關(guān)而不是正比。比如我想讓風(fēng)機(jī)以30%的轉(zhuǎn)速工作,占空比應(yīng)該怎么設(shè)置?(PS:手頭沒有測速儀等工具)
2013-11-27 21:52:12
永磁同步電機(jī)控制時(shí),如果負(fù)載轉(zhuǎn)矩出現(xiàn)周期性脈動(dòng),轉(zhuǎn)速一般也會出現(xiàn)周期性的波動(dòng)。比如單轉(zhuǎn)子空調(diào)壓縮機(jī),其負(fù)載特性是:負(fù)載在一個(gè)機(jī)械周期內(nèi)是變化的,即負(fù)載與機(jī)械角度存在一定的關(guān)系。利用Simulink
2021-08-27 08:19:12
說到變頻器輸出電流和頻率的關(guān)系,更準(zhǔn)確來說,應(yīng)該是電磁轉(zhuǎn)矩和頻率的關(guān)系。 先說下電磁轉(zhuǎn)矩和電流的關(guān)系: 電機(jī)拖動(dòng)負(fù)載主要靠電磁轉(zhuǎn)矩,而電磁轉(zhuǎn)矩的大小和電流與磁通的乘積成正比: TM-
2020-11-26 17:18:07
本帖最后由 gk320830 于 2015-3-9 06:36 編輯
可逆直流調(diào)速器在異步電機(jī)轉(zhuǎn)矩-轉(zhuǎn)速曲線測試中的應(yīng)用
2012-07-31 22:05:20
,θ??作為磁鏈位置檢測的輸入信號,確定磁鏈的準(zhǔn)確位置θ。另外電磁轉(zhuǎn)矩Te 和電機(jī)磁鏈經(jīng)速度觀測器計(jì)算出電動(dòng)機(jī)的轉(zhuǎn)速,輸出ω信號參與電機(jī)轉(zhuǎn)速的閉環(huán)控制。最后,θ 與轉(zhuǎn)矩調(diào)節(jié)器的輸出D以及電磁調(diào)節(jié)器的輸出
2009-06-14 00:23:25
如圖所示,i是參考轉(zhuǎn)速減反饋轉(zhuǎn)速之差,經(jīng)PI調(diào)節(jié)得到參考轉(zhuǎn)矩,用C語言怎么編寫?請大神賜教,萬謝!
2015-07-18 16:12:34
當(dāng)電機(jī)的旋轉(zhuǎn)速度改變時(shí),其輸出轉(zhuǎn)矩會怎樣? 變頻器驅(qū)動(dòng)時(shí)的起動(dòng)轉(zhuǎn)矩和最大轉(zhuǎn)矩要小于直接用工頻電源驅(qū)動(dòng)時(shí)的起動(dòng)轉(zhuǎn)矩和最大轉(zhuǎn)矩。 我 們經(jīng)常聽到下面的說法:“電機(jī)在工頻電源供電時(shí),電機(jī)的起動(dòng)和加
2016-01-29 10:09:24
怎樣去計(jì)算IPMSM的電磁轉(zhuǎn)矩呢?怎樣去計(jì)算IPMSM的FOC驅(qū)動(dòng)最大轉(zhuǎn)矩電流比?
2021-10-09 07:56:40
轉(zhuǎn)矩與負(fù)載轉(zhuǎn) 矩相等 T N = T L ,那么不論運(yùn)行在什么轉(zhuǎn)速上,電動(dòng)機(jī)的電樞電流 I a = I N 不變,電動(dòng)機(jī)得到了充分利用。稱這種 恒轉(zhuǎn)矩調(diào)速方式與恒轉(zhuǎn)矩負(fù)載性質(zhì)的配合關(guān)系為匹配
2011-06-13 14:22:24
恒轉(zhuǎn)矩負(fù)載應(yīng)該用什么控制方式的變頻器恒轉(zhuǎn)矩調(diào)速是指負(fù)載轉(zhuǎn)矩保持不變,但對轉(zhuǎn)速有不同的要求;恒轉(zhuǎn)矩負(fù)載的特點(diǎn)是負(fù)載轉(zhuǎn)矩與轉(zhuǎn)速無關(guān),任何轉(zhuǎn)速下轉(zhuǎn)矩總保持恒定或基本恒定。應(yīng)用的場合比如傳送帶、攪拌機(jī)
2013-05-21 10:35:29
感應(yīng)電動(dòng)機(jī)的轉(zhuǎn)速―轉(zhuǎn)矩特性,如下圖所示。空載時(shí)以接近同步轉(zhuǎn)速的速度旋轉(zhuǎn),但隨著負(fù)載的增加,轉(zhuǎn)速也同時(shí)下降,并且以負(fù)載及電動(dòng)機(jī)的轉(zhuǎn)矩TP的平衡點(diǎn)P進(jìn)行旋轉(zhuǎn)。負(fù)載若再增加到M點(diǎn)時(shí),因電動(dòng)機(jī)無法產(chǎn)生更大
2023-03-14 09:24:09
無刷電機(jī)的極對數(shù)與轉(zhuǎn)速有何關(guān)系?無刷電機(jī)的極對數(shù)與扭矩有何關(guān)系?
2021-07-20 06:36:12
何為步進(jìn)電機(jī)和步進(jìn)驅(qū)動(dòng)器?步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖頻率的關(guān)系是什么?細(xì)分步進(jìn)驅(qū)動(dòng)器有何優(yōu)點(diǎn)?
2021-10-28 08:04:59
步進(jìn)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩是什么關(guān)系?轉(zhuǎn)速高低對轉(zhuǎn)矩的影響?
2023-12-12 07:00:21
一般在步進(jìn)電機(jī)的書里面說的大多是這樣的:隨著步進(jìn)電機(jī)的脈沖頻率增大,轉(zhuǎn)矩變小。但是都沒有具體說數(shù)學(xué)關(guān)系,有沒有公式之類的描述?
2016-01-18 09:34:00
大家好,永磁同步發(fā)電機(jī)的三相通過整流橋或者直接連接固定阻值的電阻后,電機(jī)的轉(zhuǎn)速和電磁力的關(guān)系是什么樣的?是成正比嗎?有公式進(jìn)行計(jì)算嗎?小弟對電機(jī)是新手,懇求大神賜教!
2017-12-21 19:36:55
永磁電機(jī)直接轉(zhuǎn)矩的詳細(xì)原理可以自行理解,不懂可以參考其他文章或者聯(lián)系我。目錄永磁同步電機(jī)直接轉(zhuǎn)矩控制(PMSM-DTC)simulink仿真整體框圖永磁同步電機(jī)電機(jī)模塊磁鏈和轉(zhuǎn)矩滯環(huán)比較模塊轉(zhuǎn)速環(huán)
2021-08-27 07:41:22
求教大神,基于labview測量電極轉(zhuǎn)速轉(zhuǎn)矩怎么做?
2018-05-19 00:18:37
用labview和研華的USB4711a采集轉(zhuǎn)速轉(zhuǎn)矩信號,程序求助啊
2017-05-02 12:48:44
電動(dòng)機(jī)轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系是怎么樣的呢?在了解之前,首先我們需要了解什么是電動(dòng)機(jī)輸出額定轉(zhuǎn)速和電機(jī)輸出扭矩,這兩者彼此之間息息相關(guān)。額定轉(zhuǎn)速是指在額定功率下電機(jī)的轉(zhuǎn)速。也即滿載時(shí)的電機(jī)轉(zhuǎn)速,故又叫做滿載
2021-06-29 13:53:06
功率=力*速度轉(zhuǎn)矩(T)=扭力(F)*作用半徑(R)線速度(V)=2πR*每秒轉(zhuǎn)速(n秒)P=F*V 公式--1 推出F=T/R -公式--2=2πR*每分轉(zhuǎn)速(n分)/60=πR*n分/30----公式--3將公式2、3代入公式1得:P=F*V=T/R*πR*n分/30=π/30...
2021-09-13 08:03:25
剛體轉(zhuǎn)動(dòng)慣性大小、衡量剛體抵抗旋轉(zhuǎn)運(yùn)動(dòng)的慣性的物理量。轉(zhuǎn)矩和轉(zhuǎn)動(dòng)慣量關(guān)系:T=J?wT=J*wT=J?w轉(zhuǎn)矩=轉(zhuǎn)動(dòng)慣量*角加速度...
2021-08-31 06:35:47
電機(jī)功率和轉(zhuǎn)矩、轉(zhuǎn)速之間的關(guān)系功率=力*速度P=F*V--------------------------------------------------公式--1轉(zhuǎn)矩(T)=扭力(F)*作用半徑
2021-08-27 06:38:19
列表2.2 參數(shù)關(guān)系2.2.1 額定轉(zhuǎn)速2.2.2 功率和轉(zhuǎn)矩2.2.3 轉(zhuǎn)矩與重力加速度2.2.4 磁通量[^3]與電壓2.2.5 電壓,電感,電流2.2.6 轉(zhuǎn)矩,體積,功率2.3...
2021-09-15 08:58:36
電機(jī)的極數(shù)和轉(zhuǎn)速有什么關(guān)系 如何退出運(yùn)行的無銘牌電動(dòng)機(jī)的極數(shù)
2021-02-25 07:33:22
電機(jī)額定轉(zhuǎn)速與額定轉(zhuǎn)矩怎么計(jì)算?電機(jī)額定轉(zhuǎn)矩作用是什么?
2021-10-08 06:55:58
的前提下,通過控制電機(jī)的瞬時(shí)電壓輸入來控制電機(jī)定子磁鏈的瞬時(shí)旋轉(zhuǎn)速度,來改變它對轉(zhuǎn)子的瞬時(shí)轉(zhuǎn)差率,達(dá)到直接控制電機(jī)輸出的目的。 在直接轉(zhuǎn)矩控制中,電機(jī)定子磁鏈的幅值通過上述電壓的矢量控制而保持為額定值
2016-01-20 10:37:18
1、簡述矢量變換控制調(diào)速原理并畫出異步電動(dòng)機(jī)矢量變換控制系統(tǒng)圖及直接磁場定向矢量變換控制變頻調(diào)速系統(tǒng)圖,并對分析兩圖中的輸入與輸出量之間的關(guān)系表達(dá)式2、簡述直接轉(zhuǎn)矩控制原理并畫出直接轉(zhuǎn)矩控制系統(tǒng)
2021-01-11 17:47:31
額定功率 P、額定轉(zhuǎn)速 N 和額定轉(zhuǎn)矩 T:轉(zhuǎn)矩 T 可以從功率 P 和轉(zhuǎn)速 N算得:公式說明,同一功率下,轉(zhuǎn)矩和轉(zhuǎn)速成反比,即使用減速箱放大輸出轉(zhuǎn)矩時(shí),同時(shí)會減少轉(zhuǎn)速。從力的做功角度,得推導(dǎo)過程
2021-09-15 07:16:13
減速器效率實(shí)驗(yàn)中轉(zhuǎn)速轉(zhuǎn)矩測量裝置:本文介紹了基于80C31 單片機(jī)的轉(zhuǎn)速轉(zhuǎn)矩測量儀的測量原理、硬件結(jié)構(gòu)及軟件設(shè)計(jì)方法。關(guān)鍵詞:傳感器;轉(zhuǎn)速;轉(zhuǎn)矩
在減速器效率實(shí)驗(yàn)中
2009-06-06 17:53:59 19
19 電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速是最重要的兩個(gè)參數(shù),對它們的測量必須準(zhǔn)確。根據(jù)用戶提出的測量航空電機(jī)具體要求,本文分析了轉(zhuǎn)矩和轉(zhuǎn)速的測量原理,指出了采用應(yīng)變式和光電式傳感器構(gòu)成測
2009-07-07 08:48:5939 為了測量轉(zhuǎn)矩和轉(zhuǎn)速,將轉(zhuǎn)矩、轉(zhuǎn)速信號通過JCZ型轉(zhuǎn)矩轉(zhuǎn)速傳感器轉(zhuǎn)換成兩路正弦信號的電信號的進(jìn)行測量;介紹了相位差檢測電路,對相位差檢測電路中各結(jié)點(diǎn)的信號波形和檢測
2009-07-07 15:16:0345 電機(jī)功率和轉(zhuǎn)速的關(guān)系:P=T×n/9550其
2010-10-22 16:40:490 著直接轉(zhuǎn)矩控制等高性能控制技術(shù)研究的深入與成熟,交流電氣調(diào)速系統(tǒng)正在逐步擴(kuò)大其應(yīng)用領(lǐng)域。交流調(diào)速系統(tǒng)往往要求對轉(zhuǎn)速實(shí)施閉環(huán)控制,這是通過轉(zhuǎn)速PI調(diào)節(jié)器實(shí)現(xiàn)的;但
2010-11-08 08:34:0343 怎樣選用轉(zhuǎn)矩轉(zhuǎn)速傳感器
下面給大家講講扭矩傳感器的有關(guān)知識。我想先問問大家,你知道如何挑選傳感器嗎?究竟什么樣的傳感器嗎?究竟什么樣的傳感器生產(chǎn)商是值得
2010-12-31 02:12:5136 直流電機(jī)的電磁轉(zhuǎn)矩
定義:根據(jù)電磁力定律,當(dāng)電樞繞組中有電樞電流 流過時(shí),在磁場內(nèi)將受到電磁力的
2008-11-19 16:38:15 7935
7935 
磁電式傳感器結(jié)構(gòu)示意圖
圖1 轉(zhuǎn)速轉(zhuǎn)矩傳感器結(jié)構(gòu)示意圖11 內(nèi)
2009-06-06 17:55:593863 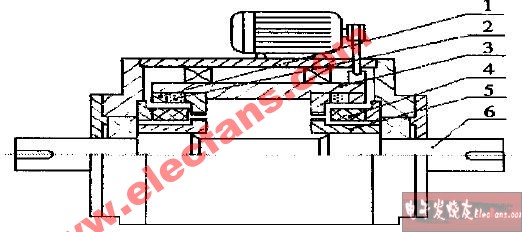
0 引言
電動(dòng)機(jī)及機(jī)械動(dòng)力裝置旋轉(zhuǎn)軸的轉(zhuǎn)矩一轉(zhuǎn)速特性是電動(dòng)機(jī)及機(jī)械動(dòng)力裝置的一項(xiàng)重要參數(shù),轉(zhuǎn)矩轉(zhuǎn)速特性曲線的形狀及曲線中的起動(dòng)轉(zhuǎn)矩、最小轉(zhuǎn)矩、最大轉(zhuǎn)
2010-08-19 11:04:541295 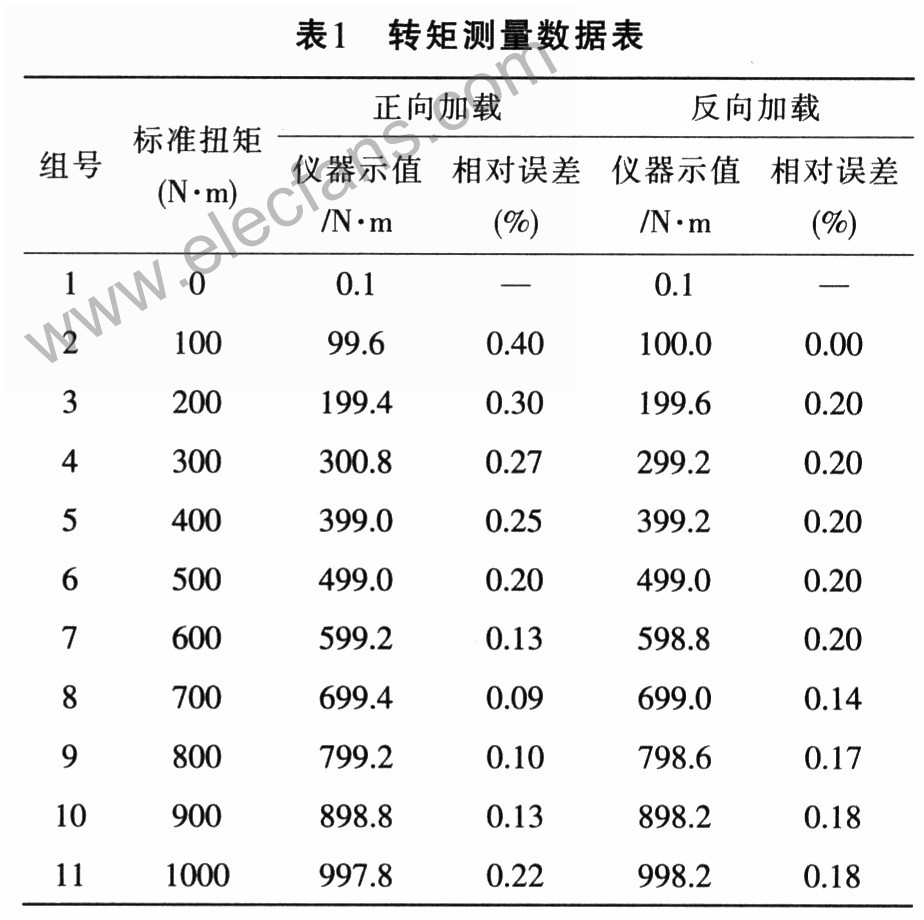
功率的概念是單位時(shí)間所做的功,在一定功率的條件下,轉(zhuǎn)速轉(zhuǎn)速越高,扭矩就越低,反之就越高。比如同樣1.5kw 電機(jī),6 級輸出轉(zhuǎn)矩就比4 級高,也可用公式M=9550P/n 粗算,對于交流電機(jī):額定
2017-11-08 17:36:25174024 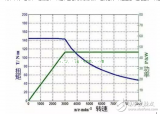
角速度與轉(zhuǎn)速的關(guān)系,角速度通常用rad/s表示,轉(zhuǎn)速的常用單位是r/min。角速度與轉(zhuǎn)速有換算的關(guān)系,將轉(zhuǎn)速化為角速度:分子×2π,分母×60,相當(dāng)于將轉(zhuǎn)速n×π/30,反之,將角速度化為轉(zhuǎn)速,相當(dāng)于將角速度ω×30/π,或ω÷π/30。
2017-11-15 14:35:1479939 針對常規(guī)EKF估計(jì)結(jié)果受給定的噪聲協(xié)方差陣影響較大的問題,提出了一種基于自適應(yīng)卡爾曼濾波(Adaptive Kalman filtering,AEKF)來同時(shí)估計(jì)電機(jī)轉(zhuǎn)速和負(fù)載轉(zhuǎn)矩的方法。在用
2018-03-09 13:35:181 本文主要介紹了基于電磁轉(zhuǎn)矩反饋補(bǔ)償?shù)挠来磐诫姍C(jī)新型IP速度控制器。
2018-06-05 08:00:000 橋來檢測轉(zhuǎn)矩信號,并采用導(dǎo)電滑環(huán)來耦合電源輸入及應(yīng)變信號輸出,由于導(dǎo)電滑環(huán)屬于磨擦接觸,因此不可避免地存在著磨損和發(fā)熱,這樣不但限制了旋轉(zhuǎn)軸的轉(zhuǎn)速及導(dǎo)電滑環(huán)的使用壽命,同時(shí)由于接觸不可靠,也不可避免
2020-06-02 07:58:004731 
日本伺服電機(jī)的轉(zhuǎn)矩和性能的關(guān)系 我們都知道當(dāng)下國內(nèi)市場工業(yè)自動(dòng)化用到的伺服電機(jī)70%左右都是日系伺服,日本伺服電機(jī)有松下、安川、富士和三菱這幾個(gè)伺服品牌。 日系伺服電機(jī)作為補(bǔ)助馬達(dá)間接變速裝置
2020-06-12 14:58:583132 日常工作中,經(jīng)常聽到"轉(zhuǎn)矩"這個(gè)詞兒,什么是電機(jī)的轉(zhuǎn)矩呢?使機(jī)械元件轉(zhuǎn)動(dòng)的力矩稱為轉(zhuǎn)動(dòng)力矩,簡稱轉(zhuǎn)矩。
2019-02-22 08:36:1979288 步進(jìn)電機(jī)的線圈通直流電時(shí),帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機(jī)的靜態(tài)特性。
2019-10-08 15:36:133881 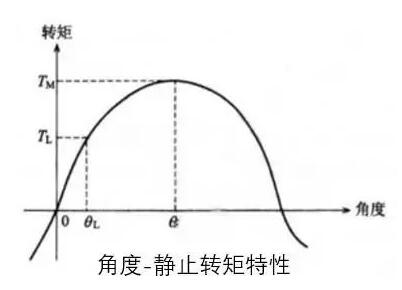
電磁轉(zhuǎn)矩是電動(dòng)機(jī)旋轉(zhuǎn)磁場各極磁通與轉(zhuǎn)子電流相互作用而在轉(zhuǎn)子上形成的旋轉(zhuǎn)力矩。是電動(dòng)機(jī)將電能轉(zhuǎn)換成機(jī)械能最重要的物理量之一,至今仍是阻尼分析與控制的理論基礎(chǔ)。
2019-11-15 08:53:3320713 
根據(jù)轉(zhuǎn)矩的不同情況,可以采取不同的轉(zhuǎn)矩測量方法。轉(zhuǎn)矩=9550*功率/轉(zhuǎn)速同樣功率=轉(zhuǎn)速*轉(zhuǎn)矩/9550平衡方程式中:功率的單位(kW);轉(zhuǎn)速的單位(r/min);轉(zhuǎn)矩的單位(N.m);9550是計(jì)算系數(shù)。
2019-11-15 09:16:0411125 可以用左手定則判定:左手四指和拇指在同一平面并成90度關(guān)系,讓磁通穿過手心,四指代表電流方向,而電磁轉(zhuǎn)矩T的方向即為拇指所指的方向。
2019-11-15 09:53:398475 電機(jī)功率、轉(zhuǎn)速、扭矩的關(guān)系。功率的概念是單位時(shí)間所做的功,在一定功率的條件下,轉(zhuǎn)速轉(zhuǎn)速越高,扭矩就越低,反之就越高。
2019-12-30 14:09:1429151 電磁轉(zhuǎn)矩應(yīng)該是電機(jī)理論轉(zhuǎn)矩,忽略摩擦定因素輸出轉(zhuǎn)矩。電機(jī)的輸出轉(zhuǎn)矩就是電機(jī)的電磁轉(zhuǎn)矩減去電機(jī)的摩擦輸出的轉(zhuǎn)矩。負(fù)載轉(zhuǎn)矩就是電機(jī)經(jīng)減速機(jī)等作用到負(fù)載的轉(zhuǎn)矩。
2020-01-15 14:46:2029816 電動(dòng)機(jī)轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系及異同綜述
2021-06-30 09:24:103 電動(dòng)機(jī)轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系是怎么樣的呢?在了解之前,首先我們需要了解什么是電動(dòng)機(jī)輸出額定轉(zhuǎn)速和電機(jī)輸出扭矩,這兩者彼此之間息息相關(guān)。 額定轉(zhuǎn)速是指在額定功率下電機(jī)的轉(zhuǎn)速。也即滿載時(shí)的電機(jī)轉(zhuǎn)速,故又叫
2021-07-13 17:23:0526798 電機(jī)的電壓和頻率都有專門的設(shè)計(jì)。對于變頻器而言,低速時(shí)轉(zhuǎn)矩高;對于電機(jī)而言,若通過減速機(jī)計(jì)算扭矩時(shí),要考慮齒輪傳動(dòng)效率損失的因素。低速時(shí)轉(zhuǎn)矩越高,轉(zhuǎn)矩和轉(zhuǎn)速的乘積的k倍等于功率,也就是說,功率一定的時(shí)候,轉(zhuǎn)速與轉(zhuǎn)矩成反比關(guān)系。
2021-10-01 09:20:0038364 本文將以有刷直流電機(jī)為例,探討有刷直流電機(jī)的轉(zhuǎn)矩負(fù)載、有刷直流電機(jī)的轉(zhuǎn)速、有刷直流電機(jī)的電機(jī)電流之間的關(guān)系。
2022-01-18 14:33:1812479 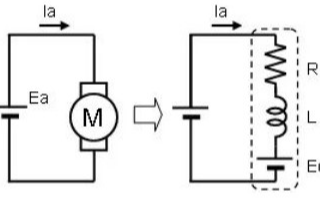
由于公式【2】中的功率P的單位為kw,而電壓U的單位是V,電流I的單位是A,而UI乘積的單位是V.A,即w,所以將公式【6】代入到公式【2】中時(shí),UI需要除以1000以統(tǒng)一單位。
2022-08-24 11:47:1716385 本文將以有刷直流電機(jī)為例,探討有刷直流電機(jī)的轉(zhuǎn)矩負(fù)載、有刷直流電機(jī)的轉(zhuǎn)速、有刷直流電機(jī)的電機(jī)電流之間的關(guān)系。
2023-02-15 16:11:582118 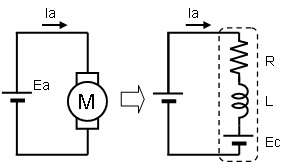
直流電動(dòng)機(jī)轉(zhuǎn)速與電流之間存在著一定的關(guān)系。一般來說,直流電動(dòng)機(jī)的轉(zhuǎn)速與電流成正比關(guān)系,即電流越大,轉(zhuǎn)速越快。
2023-03-06 18:14:0614265 對于任何極數(shù)的電動(dòng)機(jī)產(chǎn)品,相對較高的轉(zhuǎn)速和較大的轉(zhuǎn)矩,對于拖動(dòng)負(fù)載是比較理想的結(jié)果,兩者的關(guān)系如何確定和權(quán)衡,是電機(jī)設(shè)計(jì)與實(shí)際工況適應(yīng)性的關(guān)鍵要素。
2023-03-08 11:24:351085 永磁同步電機(jī)的直接轉(zhuǎn)矩控制(四)一一一基于滑模轉(zhuǎn)速控制器的DTC目錄 永磁同步電機(jī)的直接轉(zhuǎn)矩控制(四)一一一基于滑模轉(zhuǎn)速控制器的DTC 0研究背景 1基于滑模的轉(zhuǎn)速控制器設(shè)計(jì) 2基于滑模的轉(zhuǎn)速控制器
2023-03-15 11:29:593 電磁轉(zhuǎn)矩是電動(dòng)機(jī)中最基本、最常見的轉(zhuǎn)矩形式,常見的如直流電機(jī)、交流異步電機(jī)、交流同步電機(jī)等都是通過不同的電磁轉(zhuǎn)矩原理實(shí)現(xiàn)轉(zhuǎn)動(dòng)。電磁轉(zhuǎn)矩大小與電流、磁場強(qiáng)度等有關(guān),因此在設(shè)計(jì)電機(jī)時(shí)通常要考慮這些因素并進(jìn)行合理的匹配。
2023-03-28 14:08:281486 電磁轉(zhuǎn)矩是指電動(dòng)機(jī)中通過電流產(chǎn)生的磁場和磁場中的磁極相互作用形成的轉(zhuǎn)矩。它的大小取決于線圈中的電流和磁場的強(qiáng)度。而負(fù)載轉(zhuǎn)矩是指電動(dòng)機(jī)輸出的機(jī)械轉(zhuǎn)矩減去負(fù)載阻力和慣性等因素的影響后的實(shí)際轉(zhuǎn)矩。
2023-03-28 14:13:115537 電磁轉(zhuǎn)矩是指在電動(dòng)機(jī)中通過電流產(chǎn)生的磁場和磁場中的磁極相互作用形成的轉(zhuǎn)矩。它的大小取決于線圈中的電流和磁場的強(qiáng)度。而輸出轉(zhuǎn)矩則是指電機(jī)輸出的機(jī)械轉(zhuǎn)矩減去負(fù)載阻力和慣性等因素的影響后的實(shí)際轉(zhuǎn)矩。
2023-03-28 14:19:443361 在理論分析中,電磁轉(zhuǎn)矩與電壓成正比例關(guān)系,即電磁轉(zhuǎn)矩隨著施加在電機(jī)定子上的電壓的增加而增大。這是由于電機(jī)定子上施加電壓后,電流的大小與定子電壓成正比例關(guān)系,而電磁轉(zhuǎn)矩與電流強(qiáng)度成正比例關(guān)系,因此電磁轉(zhuǎn)矩與電壓同步變化。
2023-03-28 14:26:222475 電磁轉(zhuǎn)矩是電機(jī)的一個(gè)重要指標(biāo),電磁轉(zhuǎn)矩的準(zhǔn)確計(jì)算也會影響一臺電機(jī)的性能。最常用的兩種方法就是麥克斯韋應(yīng)力張量法和磁通法。這兩種方法都基于有限元計(jì)算,有限元分析軟件功能比較強(qiáng)大,可以通過節(jié)點(diǎn)磁位很容易計(jì)算電磁轉(zhuǎn)矩。
2023-03-28 14:30:586102 工業(yè)企業(yè)通常建議使用手冊或產(chǎn)品銘牌中提供的數(shù)據(jù)代替電動(dòng)機(jī)參數(shù)來計(jì)算轉(zhuǎn)矩特性曲線Tem=f(s)。這些計(jì)算可以使用以下實(shí)際表達(dá)式:電磁轉(zhuǎn)矩公式。
2023-03-28 14:34:314425 
與線圈軸向與磁場軸線的夾角正弦值成正比:電磁轉(zhuǎn)矩的大小還與線圈軸向與磁場軸線的夾角正弦值成正比,即夾角越大,電磁轉(zhuǎn)矩越小。
2023-03-28 14:38:501523 穩(wěn)定電機(jī)運(yùn)行:電磁轉(zhuǎn)矩的大小與線圈中的電流和磁場的強(qiáng)度相關(guān),因此在電動(dòng)機(jī)工作時(shí),需要通過合理地調(diào)節(jié)電磁裝置參數(shù)來保持電磁轉(zhuǎn)矩的穩(wěn)定,從而保證機(jī)器平穩(wěn)運(yùn)行。
2023-03-28 14:47:411119 當(dāng)通電線圈的電流在磁場中受到力矩時(shí),線圈開始轉(zhuǎn)動(dòng),產(chǎn)生一定大小的電磁轉(zhuǎn)矩。這個(gè)電磁轉(zhuǎn)矩是由安培定理和洛倫茲力相互作用所產(chǎn)生的。線圈旋轉(zhuǎn)時(shí),在線圈內(nèi)產(chǎn)生的感應(yīng)電動(dòng)勢與提供電源給線圈的電動(dòng)勢方向相反,這種感應(yīng)電動(dòng)勢稱為“反電動(dòng)勢”,它越大電機(jī)效率越高。
2023-03-28 14:52:571770 在直流電動(dòng)機(jī)中,電磁轉(zhuǎn)矩是由線圈中的電流和磁場的相互作用產(chǎn)生的。由于直流電機(jī)的線圈在工作時(shí)通過電源提供的電流,線圈周圍產(chǎn)生磁場。磁場中存在極性,并與磁鐵中的極性相作用。當(dāng)電機(jī)的轉(zhuǎn)子開始旋轉(zhuǎn)時(shí),磁極也會隨之旋轉(zhuǎn),從而與周圍的磁場斷續(xù)地相互作用,產(chǎn)生變化的轉(zhuǎn)矩作用力,即電磁轉(zhuǎn)矩。
2023-03-28 14:59:062874 我們在選擇伺服電機(jī)的時(shí)候,最關(guān)心的參數(shù)便是額定轉(zhuǎn)速以及額定轉(zhuǎn)矩。那么,它們之間的關(guān)系是怎么的呢?它們之間如何進(jìn)行換算呢?簡單說一下。 先說關(guān)系,電機(jī)的轉(zhuǎn)速與轉(zhuǎn)矩是成反比例關(guān)系的,轉(zhuǎn)速越高,轉(zhuǎn)矩越小
2023-05-20 12:55:013799 使機(jī)械元件轉(zhuǎn)動(dòng)的力矩稱為轉(zhuǎn)動(dòng)力矩,簡稱轉(zhuǎn)矩。機(jī)械元件在轉(zhuǎn)矩作用下都會產(chǎn)生一定程度的扭轉(zhuǎn)變形,故轉(zhuǎn)矩有時(shí)又稱為扭矩。
2023-07-02 14:20:276177 
使機(jī)械元件轉(zhuǎn)動(dòng)的力矩稱為轉(zhuǎn)動(dòng)力矩,簡稱轉(zhuǎn)矩。機(jī)械元件在轉(zhuǎn)矩作用下都會產(chǎn)生一定程度的扭轉(zhuǎn)變形,故轉(zhuǎn)矩有時(shí)又稱為扭矩。
2023-08-01 15:26:011112 電機(jī)轉(zhuǎn)矩分為電磁轉(zhuǎn)矩和磁阻轉(zhuǎn)矩。本期,從能量的角度來聊聊什么是電磁轉(zhuǎn)矩和磁阻轉(zhuǎn)矩,盡量讓大家不通過死記硬背學(xué)知識。
2023-07-14 17:31:281096 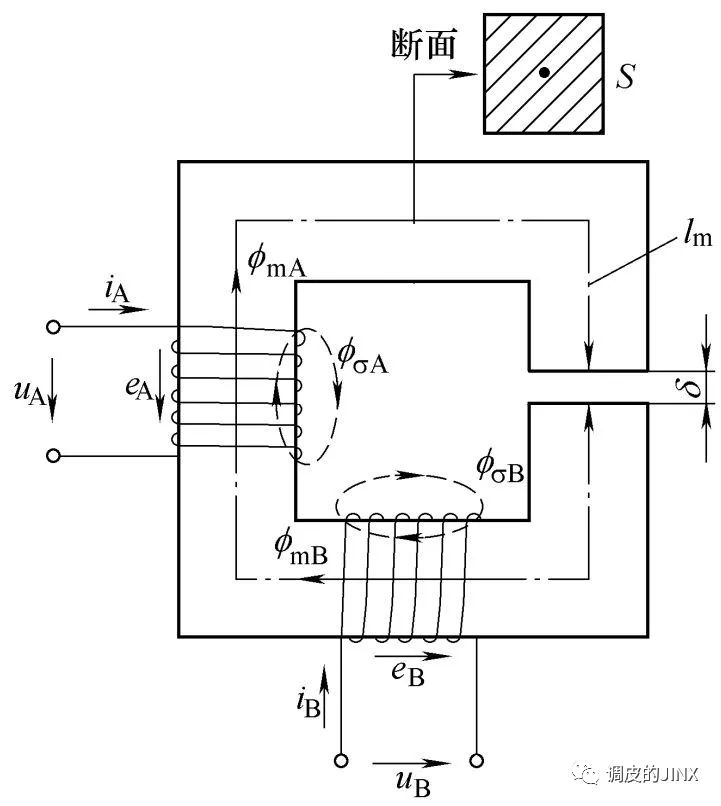
靜態(tài)轉(zhuǎn)矩是值不隨時(shí)間延長而變化或變化很小、很緩慢的轉(zhuǎn)矩,包括靜止轉(zhuǎn)矩、恒定轉(zhuǎn)矩、緩變轉(zhuǎn)矩和微脈動(dòng)轉(zhuǎn)矩。
2023-07-26 14:15:562648 
電機(jī)的電流和轉(zhuǎn)速的關(guān)系是:負(fù)載越大,轉(zhuǎn)速越慢;負(fù)載不變,電流越大,轉(zhuǎn)速越大。它們之間的關(guān)系可以由電動(dòng)機(jī)的工作原理和電學(xué)方程來解釋。一般來說,這個(gè)關(guān)系可以概括為兩個(gè)規(guī)律: 對于一個(gè)固定的加載力矩,電機(jī)
2023-09-06 17:08:118295 具備許多獨(dú)特的優(yōu)點(diǎn)。 首先,永磁同步電動(dòng)機(jī)具有高效率。由于其采用了永磁體產(chǎn)生磁場,相對于異步電動(dòng)機(jī)的勵(lì)磁線圈產(chǎn)生的磁場,永磁同步電動(dòng)機(jī)的機(jī)械、電磁耦合更高,因此在轉(zhuǎn)矩的轉(zhuǎn)換上更加高效。其電磁轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系更為線性,通過適當(dāng)控制,可以實(shí)現(xiàn)高速調(diào)節(jié)。此外,永磁同步
2024-01-19 10:42:05218  電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論