本文將介紹三相異步電動機(jī)正反轉(zhuǎn)的主電路和控制電路,以及與PLC控制系統(tǒng)的外部接線圖和梯形圖。
2016-09-28 11:37:22 55374
55374 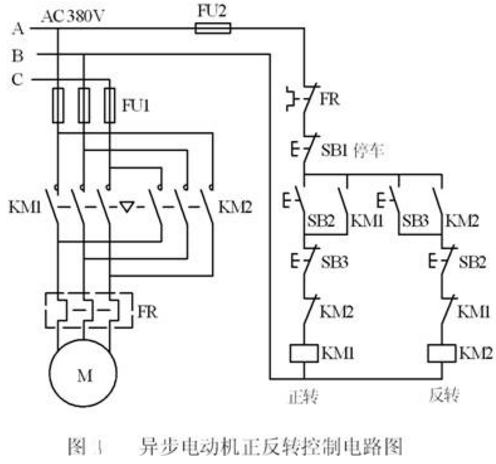
點動控制電動機(jī),一般不用PLC來實現(xiàn)點動控制,但是為了方便大家學(xué)習(xí)SIMATIC S7-1500 PLC內(nèi)容,所以從點動控制由簡單到難的為大家分享PLC實例。
2023-07-06 09:33:024216 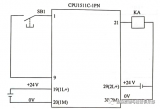
PLC控制電動機(jī)正反轉(zhuǎn)方式圖解
2021-01-27 06:22:49
PLC是怎樣控制電動機(jī)的正反轉(zhuǎn)的?有哪些操作步驟?
2021-10-11 09:08:08
PLC是怎樣控制交流感應(yīng)電動機(jī)的呢?怎樣將正轉(zhuǎn)繼電器和反轉(zhuǎn)繼電器接入PLC的輸出端呢?
2021-10-14 07:04:26
的驅(qū)動電路,然后在連接電動機(jī)。還有一種方案是用PLC作為控制器,來發(fā)送脈沖,控制步進(jìn)電動機(jī)的運行。項目還在嘗試中,大家有做過的嗎,能給點意見嗎
2014-05-03 19:09:58
1.三相交流異步電動機(jī)點動控制線路的檢修點動控制線路是指通過按鈕進(jìn)行控制,完成對三相交流異步電動機(jī)按下開關(guān)即轉(zhuǎn),松開開關(guān)即停的控制方式。典型三相交流異步電動機(jī)點動控制線路圖三相交流異步電動機(jī)點動
2018-10-29 14:41:35
電動機(jī)反接制動控制與電動機(jī)正,反轉(zhuǎn)運行控制的主要區(qū)別是什么?
2023-03-22 10:44:03
三相異步電動機(jī)降壓啟動控制較大容量的籠型異步電動機(jī)(大于10KW)因啟動電流較大,一般都采用降壓起動方式來起動。原理:起動時降低加在電動機(jī)定子繞組上的電壓,起動后再將電壓恢復(fù)到額定值。常用方法:串
2008-12-06 20:59:29
電動機(jī)正反轉(zhuǎn)控制電路
2019-11-11 05:17:39
、【判斷題】()對電路中任一節(jié)點而言流入(或流出)該節(jié)點電流的代數(shù)和恒等于零。(√)2、【判斷題】()絕緣手套應(yīng)存在專用的柜子里,對存放的環(huán)境溫度沒有特殊的要求。(×)3、【判斷題】()電動機(jī)的控制回路屬于電動機(jī)一次回路系統(tǒng)圖的一部分。(×)4、【判斷題】()鉗形電流...
2021-09-17 06:37:21
)考試最新大綱及電工(初級)考試真題匯總,有助于電工(初級)模擬考試題庫考前練習(xí)。1、【判斷題】()將待剝皮的線頭置于剝線鉗鉗頭的刃口中,用手將兩鉗柄一捏,然后一松,絕緣皮便與芯線脫開。(√)2、【判斷題】()電動機(jī)的控制回路屬于電動機(jī)一次回路系統(tǒng)圖的一部分。(×)3、【判斷題】...
2021-09-02 07:20:29
電動機(jī)的數(shù)字控制是電動機(jī)控制的發(fā)展趨勢,用單片機(jī)對電動機(jī)進(jìn)行控制是實現(xiàn)電動機(jī)數(shù)字控制最常用的手段。本書詳盡、系統(tǒng)地介紹了常用的直流電動機(jī)、交流電動機(jī)、步進(jìn)電動機(jī)、無刷直流電動機(jī)、交永磁同步伺服電動機(jī)
2023-09-22 07:05:56
參考設(shè)計為無感應(yīng)器無刷直流電動機(jī)提供完整的系統(tǒng)級解決方案,是開發(fā)人員使用 C8051F85x/6x 產(chǎn)品系列,以評估和采用低成本 BLDC 電動機(jī)控制解決方案的一種工具。C8051F85x/6x 系列
2015-01-28 23:42:28
機(jī)或單片機(jī)可進(jìn)行數(shù)字調(diào)節(jié)器控制或全數(shù)字式直流電動機(jī)控制系統(tǒng)實驗。二、系統(tǒng)構(gòu)成1、立式機(jī)柜(晶閘管三相反并聯(lián)
2021-08-26 12:50:48
內(nèi)容簡介 電動機(jī)的數(shù)字控制是電動機(jī)控制的發(fā)展趨勢,用單片機(jī)對電動機(jī)進(jìn)行控制是實現(xiàn)電動機(jī)數(shù)字控制常用的手段。王曉明編著的這本《電動機(jī)的單片機(jī)控制(第3版)》詳盡、系統(tǒng)地介紹了常用的直流電動機(jī)、交流電動機(jī)
2018-04-24 17:51:25
同步電動機(jī)DTC的最大轉(zhuǎn)矩電流比控制 第7章 正弦波永磁同步電動機(jī)DTC的定子磁鏈幅值恒值控制策略 第8章 兩相導(dǎo)通方式無刷直流電動機(jī)的DTC雙環(huán)控制系統(tǒng)第9章 三相導(dǎo)通無刷直流電動機(jī)的直接轉(zhuǎn)矩控制 第10章
2019-12-03 15:41:30
1、三相交流異步電動機(jī)控制系統(tǒng)中常用的保護(hù)環(huán)節(jié)有哪些短路保護(hù),過載保護(hù),零壓和欠壓保護(hù),過 電流保護(hù), 斷相保護(hù)。2、電氣控制系統(tǒng)圖分哪幾類電氣控制系統(tǒng)圖分為:電氣原理圖、 電氣元件布置圖和電氣安裝
2021-09-17 06:52:56
三相交流異步電動機(jī)控制系統(tǒng)中常用的保護(hù)環(huán)節(jié)有哪些?三相異步電機(jī)能耗制動的原理及特點是什么?抑制變頻器干擾的措施有哪些?可編程控制器的特點有哪些?可編程控制器的選型需要考慮哪些問題?電磁繼電器與接觸器的區(qū)別主要是什么?PLC的主要性能指標(biāo)有哪些?PLC編程語言主要有哪幾種?電動機(jī)常用的保護(hù)環(huán)節(jié)有哪些?
2021-11-15 07:08:19
對于電動機(jī)的起動過程,為了避免定子回路的大電流沖擊,設(shè)計有兩種起動方法。方法一,通過設(shè)置在操作面板上的起動電位器,人工控制起動過程的快慢。方法二,通過單片機(jī)控制器將給定轉(zhuǎn)速按一定的函數(shù)關(guān)系緩慢地增大
2013-10-23 16:18:59
自動控制系統(tǒng)中作執(zhí)行元件,所以又稱為執(zhí)行電動機(jī)。例如數(shù)控車床,刀具由伺服電動機(jī)拖動,他會按照給定目標(biāo)的形狀拖動刀具進(jìn)行切割器件。早期伺服電動機(jī)輸出功率較小,功率范圍一般為0.1~100瓦,而目前伺服
2008-11-19 23:40:31
所需參數(shù)設(shè)定——伺服驅(qū)動器 用PLC的高速輸出點控制伺服電動機(jī),除了接線比用PLC的高速輸出點控制步進(jìn)電動機(jī)復(fù)雜外,后者不需要設(shè)置參數(shù)(細(xì)分的設(shè)置除外),而要伺服系統(tǒng)正常運行,必須對伺服系統(tǒng)進(jìn)行必要
2023-03-03 15:37:03
控制對象。在自動控制系統(tǒng)中,用作執(zhí)行元件,把所收到的電信號轉(zhuǎn)換成電動機(jī)軸上的角位移或角速度輸出。分為直流和交流伺服電動機(jī)兩大類,其主要特點是,當(dāng)信號電壓為零時無自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
2019-06-11 04:20:36
對于電動機(jī)我是個外行,我想請問下直流電動機(jī)或者交流電動機(jī)的轉(zhuǎn)子相對于定子的轉(zhuǎn)速穩(wěn)定性好的是哪個,轉(zhuǎn)動過程中轉(zhuǎn)子轉(zhuǎn)速波動特性是有一定規(guī)律還是隨機(jī)?可不可控?恒定轉(zhuǎn)速下其轉(zhuǎn)子振動角度幅值是否可控?或者說
2016-12-20 19:40:43
1、定時自動循環(huán)控制電路說明:1、 題圖中的三相異步電動機(jī)容量為1.5KW,要求電路能定時自動循環(huán)正反轉(zhuǎn)控制;正轉(zhuǎn)維持時間為20秒鐘,反轉(zhuǎn)維持時間為40秒鐘。2、 按原理圖在配電板上配線,要求線路
2018-11-01 10:50:08
原理便是如此。 為了方便描述,假設(shè)在SB2回路閉合時電動機(jī)轉(zhuǎn)動的方向為正,下文稱SB2所在回路為正轉(zhuǎn)回路,SB3所在回路為反轉(zhuǎn)回路。 我們來看控制回路,為了方便講解,我們在圖中做了數(shù)字的編號,每一個
2018-10-30 18:19:25
現(xiàn)代同步電動機(jī)多采用無刷勵磁系統(tǒng),即同軸裝配的同步電動機(jī)、旋轉(zhuǎn)整流器、交流主勵磁機(jī)的無刷勵磁系統(tǒng)和靜上式副勵磁控制柜的無刷勵磁控制系統(tǒng)。 勵磁控制系統(tǒng)設(shè)計采用的三相橋式整流電路,除其三相橋式
2023-03-02 10:42:23
什么是電磁干擾?基于DSP的電動機(jī)控制系統(tǒng)硬件的電磁兼容該如何去設(shè)計?基于DSP的電動機(jī)控制系統(tǒng)軟件的電磁兼容該如何去設(shè)計?
2021-08-18 07:29:45
【摘要】在分析直流無刷電動機(jī)數(shù)學(xué)模型的基礎(chǔ)上,利用MATLAB/SIMULINK仿真平臺建立系統(tǒng)的仿真模型,給出仿真結(jié)果,通過施加不同的控制策略,以驗證控制算法的合理性,為分析直流無刷電動機(jī)控制系統(tǒng)
2021-07-05 07:08:19
電動機(jī)旋轉(zhuǎn)速度是如何控制的?
2021-01-28 07:06:02
在本Arduino教程中,我們將學(xué)習(xí)如何使用Arduino控制直流電動機(jī)。 我們將介紹一些用于控制直流電動機(jī)的基本技術(shù),并舉兩個例子,通過它們我們將學(xué)習(xí)如何使用L298N驅(qū)動器和Arduino板來
2021-11-17 08:14:00
在本文中,您將學(xué)習(xí)如何使用L298N電動機(jī)驅(qū)動器控制步進(jìn)電動機(jī)。 該驅(qū)動板通常用于控制直流電動機(jī),但它還是控制步進(jìn)電動機(jī)的廉價替代品! 它可以控制大多數(shù)步進(jìn)電機(jī)(例如NEMA 17)的速度和旋轉(zhuǎn)方向
2021-07-08 09:06:09
如何利用PLC控制三相異步電動機(jī)?編程控制器的基本原理是什么?怎么實現(xiàn)三相異步電動機(jī)控制的設(shè)計?
2021-10-14 07:38:29
如何用FX PLC控制三相異步電動機(jī)的啟動與正反轉(zhuǎn)?
2021-10-14 06:14:00
問題:實現(xiàn)單按鈕控制電動機(jī)啟停要求:1.非自鎖式按鈕; 2.按按鈕一次,電動機(jī)開啟,再按一次,電動機(jī)關(guān)閉。首先,非自鎖式按鈕可以理解為自復(fù)式開關(guān),即按下按鈕電路接通電動機(jī)作出反應(yīng),你一松手按鈕彈開
2021-10-29 07:44:51
PLC控制電機(jī)正反轉(zhuǎn)的原理是什么?PLC控制電機(jī)正反轉(zhuǎn)有哪些實例?異步電動機(jī)正反轉(zhuǎn)PLC控制的編程步驟及方法是什么?
2021-06-29 08:16:35
異步電動機(jī)矢量控制系統(tǒng)的研究及仿真
2020-04-04 17:42:20
;在建立異步電動機(jī)數(shù)學(xué)模型的基礎(chǔ)上,用矢量控制技術(shù)來改善異步電動機(jī)的動態(tài)特性,通過對交流電機(jī)的定子電流在M-T坐標(biāo)系中磁化分量和轉(zhuǎn)矩分量的分解,使異步電機(jī)具有如同直流電動機(jī)一樣的轉(zhuǎn)矩瞬時控制特性. 論文然...
2021-09-03 06:12:54
變頻器和PLC的雙饋電動機(jī)節(jié)能技術(shù)優(yōu)勢是什么?怎么實現(xiàn)基于PLC和變頻器的雙饋電動機(jī)節(jié)能控制系統(tǒng)設(shè)計?
2021-05-31 06:37:08
一種基于PIC18Fxx的永磁無刷直流電動機(jī)控制系統(tǒng)的開發(fā)
2021-05-12 06:21:14
電機(jī)為三相變頻電動機(jī)(YPNC-50-2.2-B),無極調(diào)速,基于8051,能完成電動機(jī)起停、正反轉(zhuǎn)控制(有轉(zhuǎn)速控制更好:D),C語言程序。順便求個protel原理圖,感激:loveliness:
2011-05-19 15:57:58
件之類傳感器來檢測轉(zhuǎn)子位置卻加增成本和復(fù)雜性。并且也使到可靠性構(gòu)成挑戰(zhàn)。因此,設(shè)計師要敏銳地以無傳感器檢測方式來獲得轉(zhuǎn)子位置數(shù)據(jù)。圖1. 使用56F8013設(shè)計無電刷直流電動機(jī)控制系統(tǒng)。 為此,具備
2016-01-25 17:31:36
知識架構(gòu)框圖一、步進(jìn)電動機(jī)簡介1、步進(jìn)電機(jī)主要功能1、步進(jìn)電動機(jī)(Stepping Motor,或 Step Motor 、Stepper Motor)是一種可由電脈沖控制運動的特殊電動機(jī),可以通過
2021-06-29 07:40:00
做畢業(yè)設(shè)計:無刷直流電動機(jī)的控制系統(tǒng)設(shè)計,最好有電路圖和程序。謝謝啦
2015-05-08 19:05:47
本帖最后由 峩、那么可笑 于 2014-12-25 14:12 編輯
本次設(shè)計中采用的 DSP 控制步進(jìn)電動機(jī)的原理和方法可以用來進(jìn)一步的開發(fā)基于DSP 的多電動機(jī)控制系統(tǒng),設(shè)計中 DSP
2014-11-05 14:39:34
本次設(shè)計中采用的 DSP 控制步進(jìn)電動機(jī)的原理和方法可以用來進(jìn)一步的開發(fā)基于DSP 的多電動機(jī)控制系統(tǒng),設(shè)計中 DSP 的外圍電路例如復(fù)位電路,外部存儲器,JTAG仿真等等設(shè)計可以直接使用在多電動機(jī)
2014-10-30 13:57:14
固態(tài)繼電器控制電動機(jī)單向運轉(zhuǎn)電路
2019-10-24 02:36:07
PLC控制電動機(jī)正反向運轉(zhuǎn)電路
2019-09-28 23:43:51
步進(jìn)電動機(jī)的微機(jī)控制電路
2019-09-12 09:12:20
能不能用干簧管開關(guān)直接控制電動機(jī)的轉(zhuǎn)與停呢?
2021-04-12 07:00:09
關(guān)停電動機(jī)M1,起反順序停機(jī)的作用。兩臺三相交流電動機(jī)聯(lián)鎖啟停的PLC控制電路是指通過PLC與外接電氣部件配合實現(xiàn)對兩臺電動機(jī)先后啟動、反順序停止進(jìn)行控制。采用PLC對兩臺三相交流電動機(jī)聯(lián)鎖啟停的控制
2020-12-04 17:49:34
電動機(jī)控制電路應(yīng)用實例介紹電動機(jī)的控制實用電路。內(nèi)容包括直流電動機(jī)、交流電動機(jī)、無刷電動機(jī)、步進(jìn)電動機(jī)的控制電路,電動機(jī)的正反轉(zhuǎn)控制電路以及電動機(jī)的保護(hù)電路
2008-11-03 21:27:58 0
0 直流電動機(jī)傳動控制:直流電動機(jī)傳動控制1.1控制系統(tǒng)的組成及系統(tǒng)的要求1.1.1自動控制和自動控制系統(tǒng)1.1.2開環(huán)控制系統(tǒng)].1.3閉環(huán)控制系統(tǒng)1.1.4控制系統(tǒng)
2008-12-05 16:58:2233 本文研究了用電壓矢量變頻器和感應(yīng)電動機(jī)構(gòu)成的變頻電動機(jī)系統(tǒng)。通過對該閉環(huán)控制系統(tǒng)數(shù)學(xué)模型的建立,推導(dǎo)出了它的傳遞函數(shù)。它有著與可控硅直流調(diào)速系統(tǒng)極其相似的傳遞函
2009-06-12 15:59:2021 電動汽車用異步電動機(jī)直接轉(zhuǎn)矩控制系統(tǒng)仿真
采用有關(guān)數(shù)學(xué)模型,建立異步電動機(jī)的仿真模型,并在此基礎(chǔ)之上建立了基于MATLAB/ Simulink 的電動汽車用異步電動機(jī)直接轉(zhuǎn)矩控制
2009-11-18 10:45:3460 本文設(shè)計了一種基于PLC 的異步電動機(jī)調(diào)速與定位綜合控制系統(tǒng),應(yīng)用模糊-PI 復(fù)合控制算法實現(xiàn)了異步電動機(jī)的速度控制,應(yīng)用比例因子自調(diào)整模糊控制算法實現(xiàn)了異步電動機(jī)的位置
2010-01-27 15:38:35203
行波超聲電動機(jī)驅(qū)動控制系統(tǒng)設(shè)計
摘要:提出基于8254的行波超聲電動機(jī)驅(qū)動計算機(jī)控制系統(tǒng)。控制系統(tǒng)電路簡單,
2009-07-08 10:28:45540 
基于DSP無刷電動機(jī)控制系統(tǒng)設(shè)計
眾所周知,直流電動機(jī)調(diào)速性能好,但存在機(jī)械換向裝置易造成換向火花、電磁干擾及需要定期維護(hù)等不足;同步電動機(jī)效率高,功率
2009-10-04 09:45:34730 1. 問題闡述 應(yīng)用概述 電動機(jī)控制系統(tǒng)的設(shè)計是一個涉及多學(xué)科的問題,包括機(jī)械、電氣和控制系統(tǒng)。OPTIMUS 能
2010-06-26 10:27:331009 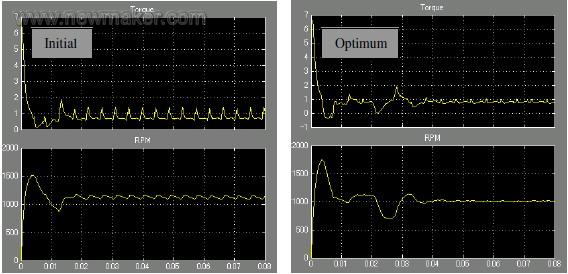
本文設(shè)計了一種基于PLC的異步電動機(jī)調(diào)速與定位綜合控制系統(tǒng),應(yīng)用模糊-PI復(fù)合控制算法實現(xiàn)了異步電動機(jī)的速度控制,應(yīng)用比例因子自調(diào)整模糊控制算法實現(xiàn)了異步電動機(jī)的位置控制。該
2011-06-21 15:08:171539 
介紹基于AT89C52單片機(jī)控制器的多 步進(jìn)電動機(jī) 控制系統(tǒng)的設(shè)計和開發(fā);該系統(tǒng)硬件結(jié)構(gòu)簡單、軟件靈活、人機(jī)界面友好,且可選用不同的驅(qū)動方式對多步進(jìn)電動機(jī)進(jìn)行控制,具有廣泛的
2011-08-24 15:44:2799 本文在分析感應(yīng)電動機(jī)矢量控制原理的基礎(chǔ)上,基于matlab/simulink建立了感應(yīng)電動機(jī)轉(zhuǎn)差型矢量控制系統(tǒng)仿真模型,仿真結(jié)果證明了該模型的合理性。并在此基礎(chǔ)上進(jìn)行系統(tǒng)的軟、硬件設(shè)
2011-09-27 09:35:223012 
基于模糊PID的永磁同步電動機(jī)數(shù)字控制系統(tǒng)-2005。
2016-04-05 16:23:4720 基于SVPWM的異步電動機(jī)矢量控制系統(tǒng)仿真
2016-04-18 10:28:4616 基于SVPWM調(diào)制的異步電動機(jī)矢量控制系統(tǒng)的仿真
2016-04-18 10:46:5314 基于TMS320LF2407的無刷直流電動機(jī)控制系統(tǒng)設(shè)計
2016-05-05 11:37:396 系統(tǒng)的電機(jī)控制,在設(shè)計中,采用了西門子SP-200 可控制編程器(PLC) 作為整個控制系統(tǒng)的控制電機(jī)的核心部分,實現(xiàn)對電動機(jī)順序轉(zhuǎn)的控制; 本課程的教學(xué)目的是讓學(xué)生熟悉電氣控制系統(tǒng)的基本控制電路,具有電氣控制系統(tǒng)分析和設(shè)計的基本能力
2017-10-25 17:36:2731 如何將三相異步電動機(jī)的Y-△降壓啟動的繼電接觸器控制改造為PLC控制系統(tǒng),以及如何將串自耦變壓器降壓啟動的繼電接觸器控制改造為PLC控制系統(tǒng)。
2017-11-29 09:22:2413918 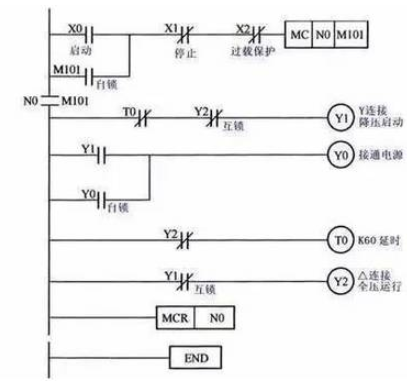
本文設(shè)計了一種基于PLC的異步電動機(jī)調(diào)速與定位綜合控制系統(tǒng),應(yīng)用模糊-PI復(fù)合控制算法實現(xiàn)了異步電動機(jī)的速度控制,應(yīng)用比例因子自調(diào)整模糊控制算法實現(xiàn)了異步電動機(jī)的位置控制。該系統(tǒng)集異步電動機(jī)速度控制和位置控制為一體,達(dá)到了一定的控制精度。
2018-09-07 09:14:006009 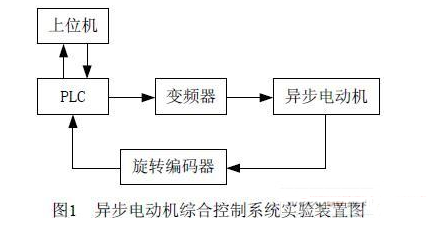
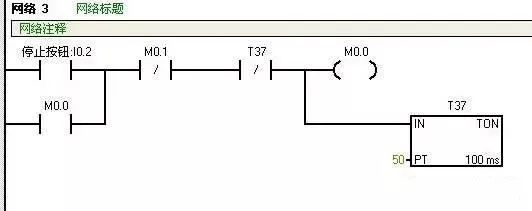
根據(jù)三相交流電動機(jī)正反轉(zhuǎn)控制的主電路,設(shè)計一個PLC控制電動機(jī)正停反的控制系統(tǒng)。
2018-09-06 13:32:3511011 
電動機(jī)的數(shù)字控制是電動機(jī)控制的發(fā)展趨勢,為電動機(jī)控制而專門設(shè)計的DSP已逐漸地成為實現(xiàn)電動機(jī)全數(shù)字實時控制的最有力的工具。木書以11公司的DSP為例。詳及、系統(tǒng)地介紹了直流電動機(jī)、交流異步電動機(jī)
2018-09-12 15:33:25176 根據(jù)下圖的三相交流電動機(jī)正反轉(zhuǎn)控制的主電路,設(shè)計一個PLC控制電動機(jī)正停反的控制系統(tǒng)。控制要求如下:
(1)正常情況下,按啟動按鈕SB1,電機(jī)正轉(zhuǎn),按下反轉(zhuǎn)啟動按鈕SB2,電機(jī)反轉(zhuǎn)。
(2)電機(jī)
2018-10-03 18:41:008499 
該控制系統(tǒng)適用于永磁同步型電動機(jī)(PMSM),可作為電動車用電動機(jī)的驅(qū)動控制系統(tǒng)。在傳統(tǒng)控制器采用的矢量控制方案基礎(chǔ)上,添加電機(jī)的損耗模型控制,通過采集加速踏板信號、車速信號、制動信號等車輛狀態(tài)信號,進(jìn)而實現(xiàn)電動車用電機(jī)的高效運動控制。
2019-09-25 11:14:313245 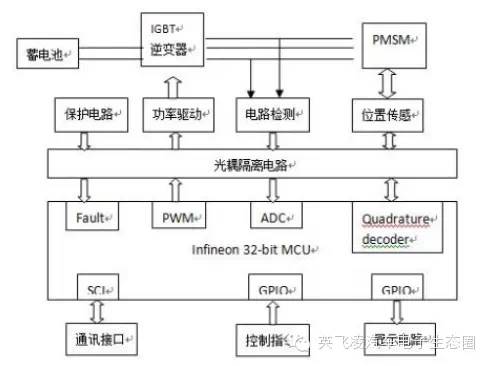
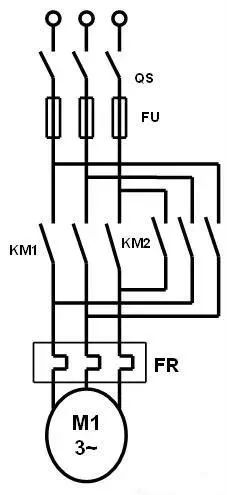
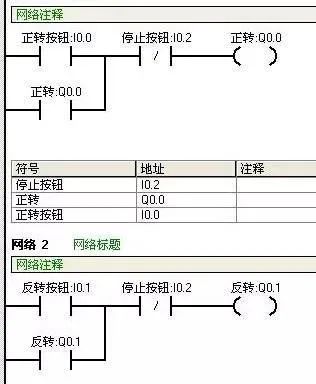
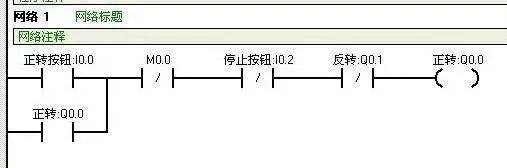
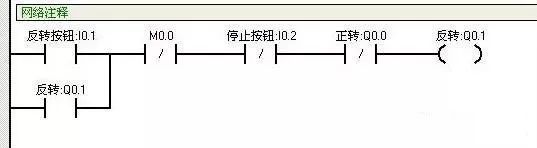
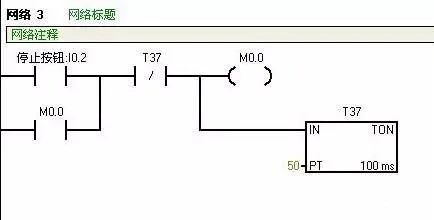
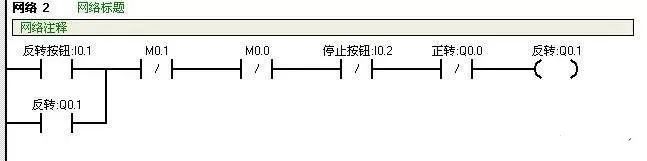
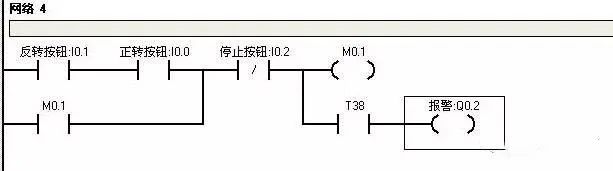
在圖1是三相異步電動機(jī)正反轉(zhuǎn)控制的主電路和繼電器控制電路圖,圖2與3是功能與它相同的plc控制系統(tǒng)的外部接線圖和梯形圖,其中,KM1和KM2分別是控制正轉(zhuǎn)運行和反轉(zhuǎn)運行的交流接觸器。
2021-02-02 06:57:3523 首先我們先確定一下按鈕、KM的使用輔助觸點情況,這里是正反轉(zhuǎn)的主回路,主回路必須有互鎖電路,其他的按鈕用常開觸點。
2022-09-07 11:24:061534 伺服電動機(jī)(servo motor)與普通電動機(jī)的區(qū)別在于,伺服電動機(jī)及驅(qū)動器是一個伺服控制系統(tǒng)(servo control system),即可以精確地跟隨輸入信號的閉環(huán)反饋控制系統(tǒng)。控制
2022-11-01 14:17:43777 伺服電動機(jī)(servo motor)與普通電動機(jī)的區(qū)別在于,伺服電動機(jī)及驅(qū)動器是一個伺服控制系統(tǒng)(servo control system),即可以精確地跟隨輸入信號的閉環(huán)反饋控制系統(tǒng)。控制量是電動機(jī)的轉(zhuǎn)角或速度、力矩。
2022-11-01 14:37:03974 首先我們先確定一下按鈕、KM的使用輔助觸點情況,這里是正反轉(zhuǎn)的主回路,主回路必須有互鎖電路,其他的按鈕用常開觸點。
2023-02-01 11:32:09475 在控制電動機(jī)的過程中,需要考慮諸如保護(hù)電機(jī)、控制速度、控制轉(zhuǎn)矩等方面的問題,具體控制方式還需要根據(jù)電動機(jī)的型號和應(yīng)用場景進(jìn)行定制化設(shè)計。
2023-03-16 16:02:525604 在實際應(yīng)用中,當(dāng)需要控制電動機(jī)正轉(zhuǎn)時,PLC會通過控制電路給電動機(jī)的正轉(zhuǎn)繼電器發(fā)送信號,使其閉合,電動機(jī)便可以正向運行;當(dāng)需要控制電動機(jī)反轉(zhuǎn)時,PLC會通過控制電路給電動機(jī)的反轉(zhuǎn)繼電器發(fā)送信號,使其閉合,電動機(jī)便可以反向運行。通過這樣的方式,即可實現(xiàn)電動機(jī)的正反轉(zhuǎn)控制。
2023-03-22 17:26:0913630 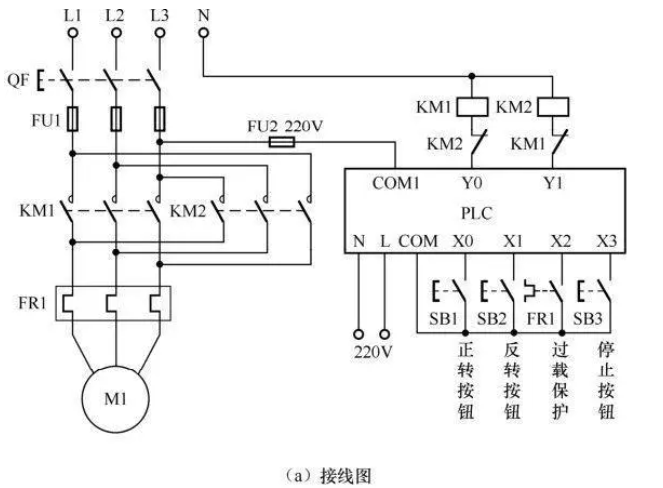
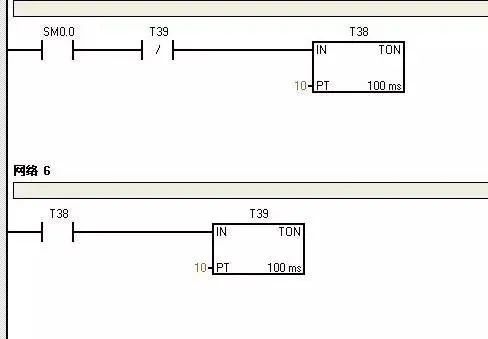
如果SB1和SB2同時按下,電動機(jī)停止轉(zhuǎn)動,并且不起動,同時報警燈L1亮1秒暗1秒不斷閃爍。此時按SB3停止按鈕進(jìn)行復(fù)位。
2023-04-06 16:12:14665 一、實驗?zāi)康?
1.學(xué)習(xí)和掌握電動機(jī)主回路的設(shè)計及接線; 2.學(xué)習(xí)和掌握電動機(jī)控制回路的設(shè)計及聯(lián)鎖保護(hù)方法; 3.加深對電氣控制系統(tǒng)各種保護(hù)、自鎖、互鎖等環(huán)節(jié)的理解; 4.學(xué)習(xí)和掌握電氣控制系統(tǒng)的現(xiàn)場接線與調(diào)試方法。
2023-04-21 14:43:470 ? 根據(jù)下圖的三相交流電動機(jī)正反轉(zhuǎn)控制的主電路,設(shè)計一個PLC控制電動機(jī)正停反的控制系統(tǒng)。 控制要求如下: ? (1)正常情況下,按啟動按鈕SB1,電機(jī)正轉(zhuǎn),按下反轉(zhuǎn)啟動按鈕SB2,電機(jī)反轉(zhuǎn)
2023-05-31 11:09:431721 
根據(jù)下圖的三相交流電動機(jī)正反轉(zhuǎn)控制的主電路,設(shè)計一個PLC控制電動機(jī)正停反的控制系統(tǒng)。
2023-07-18 10:07:251578 
電子發(fā)燒友網(wǎng)站提供《基于一種多電動機(jī)網(wǎng)絡(luò)控制系統(tǒng)的設(shè)計方法.pdf》資料免費下載
2023-10-19 10:18:040 電子發(fā)燒友網(wǎng)站提供《小功率開關(guān)磁阻電動機(jī)控制系統(tǒng)的設(shè)計.pdf》資料免費下載
2023-11-10 10:44:190 電動機(jī)。通用電動機(jī)控制器主要用于控制電動機(jī)保持良好的運行狀態(tài),而專用電動機(jī)控制器,例如伺服電動機(jī)控制器(Servo Controller),其主要控制目的是保證整個伺服系統(tǒng)(包含電動機(jī)、減速裝置和傳感裝置)正常工作。
2023-12-25 11:01:22300
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論