導(dǎo)讀:本期文章主要是介紹電壓型磁鏈觀測器和電流型磁鏈觀測器。兩種磁鏈觀測器運(yùn)用到異步電機(jī)矢量控制中,外環(huán)磁鏈環(huán)用磁鏈觀測器形成閉環(huán),分析電壓型和電流型磁鏈觀測器的觀測性能。
2022-09-06 10:35:37 1281
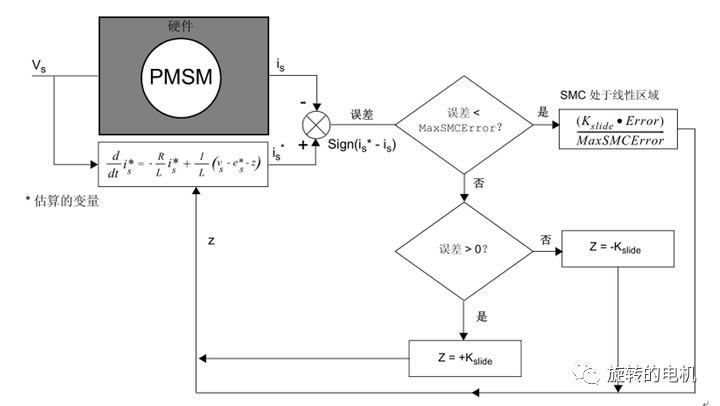
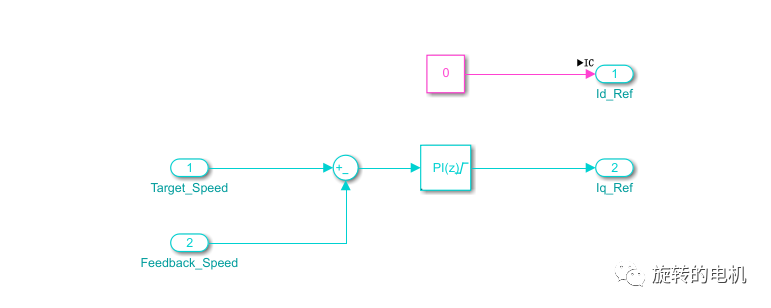
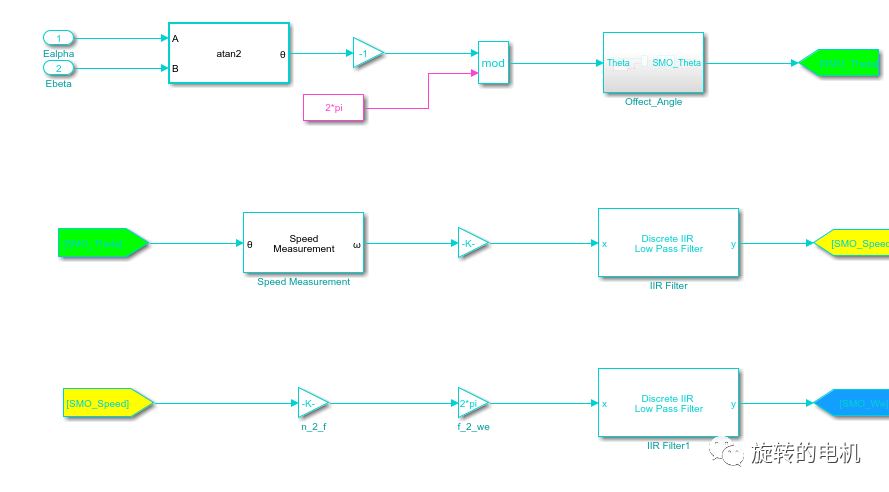
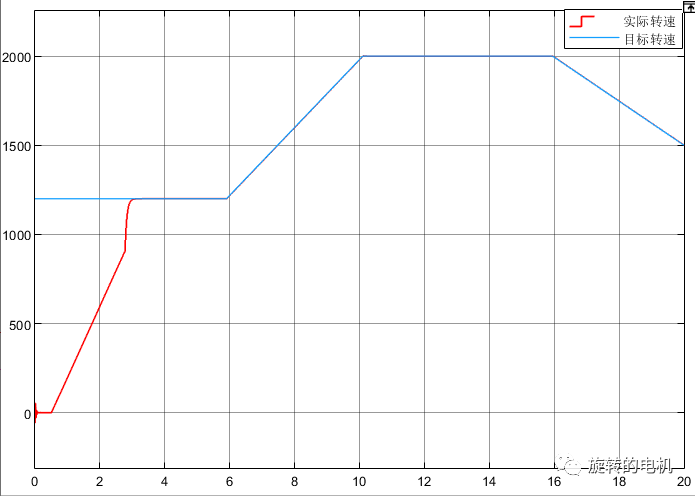
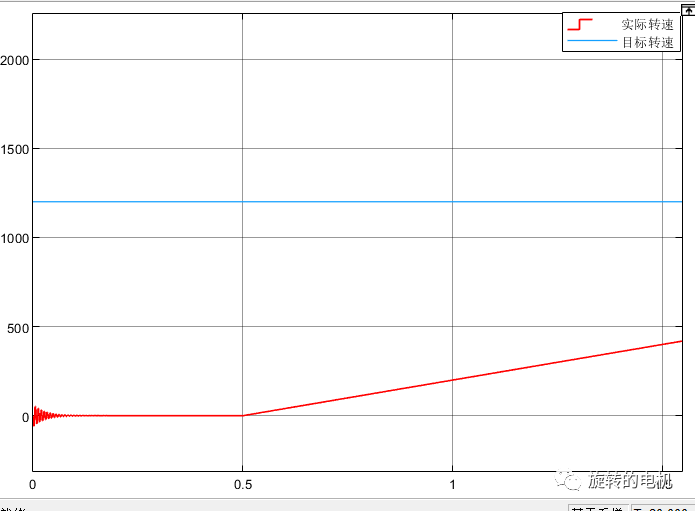
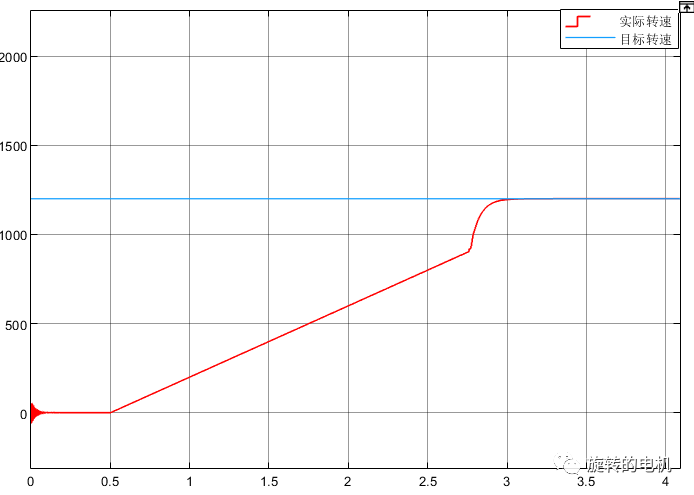
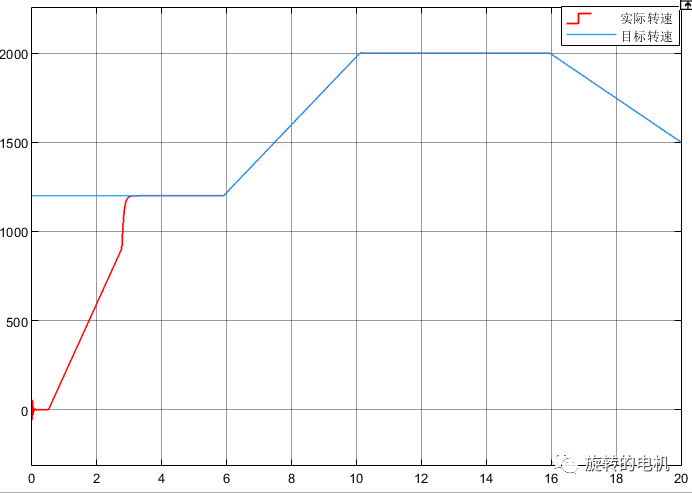
1281 進(jìn)行改進(jìn),采用電控屆經(jīng)典資料AN1078的滑膜觀測器改進(jìn)方案進(jìn)行控制,最后通過Matlab/Simulink采用傳統(tǒng)的三段式啟動方法對該方案進(jìn)行仿真分析。
2023-05-24 11:36:49969 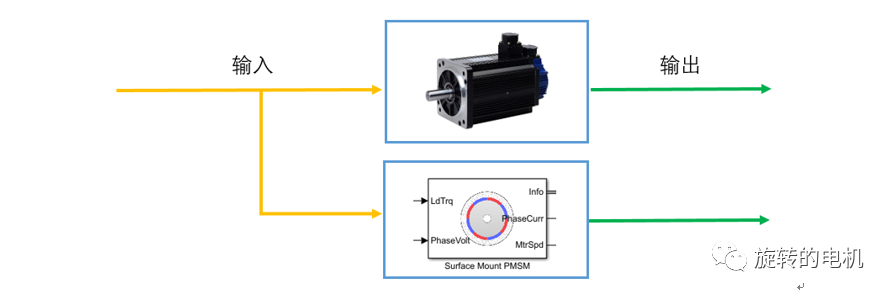
MATLAB simulink仿真
2013-07-08 15:18:37
本文小結(jié)一下,電機(jī)無位置控制中的一種--滑模觀測器的設(shè)計(jì),還有自適應(yīng)觀測器的設(shè)計(jì)等其他內(nèi)容,等有時間之后再來總結(jié)。現(xiàn)代永磁同步電機(jī)控制原理及MATLAB仿真永磁同步電機(jī)無位置傳感器控制系統(tǒng)的研究
2021-08-30 06:33:08
一道難題需要解答。請幫忙在18號完成,越快越好。希望能給出簡單輔導(dǎo)。謝謝!涉及內(nèi)容包括matlab simulink知識點(diǎn)涉及 lqr控制 全狀態(tài)回授,狀態(tài)觀測器聯(lián)系電話(微信同號):***
2023-04-16 10:11:06
摘要: 基于Matlab/Simulink,本文設(shè)計(jì)了一個無刷直流電機(jī)的控制方案,詳細(xì)闡述了無刷直流電機(jī)的運(yùn)行原理,并用Matlab/Simulink對其進(jìn)行了仿真。實(shí)驗(yàn)證明,用Matlab
2021-07-05 07:22:46
一個插件,現(xiàn)在上傳不了,文件大了,需要的朋友可以找我。算法是非線性磁鏈觀測器,各位可以網(wǎng)上搜索一下。
如果需要方案或者需要定制方案的兄弟們也可以找我聊我,提供完善的包括算法講解MATLAB仿真代碼生成等服務(wù)。
2023-05-21 22:06:47
英里外的蘇聯(lián)潛艇位置,這是一個了不起的位置觀測器。在無感FOC,正是通過觀測含有轉(zhuǎn)子位置信息的電機(jī)反電動勢,設(shè)計(jì)轉(zhuǎn)子位置和速度觀測器,觀測器可以直接采用控制器的所有研究成果,控制器上的穩(wěn)定性、帶寬等
2022-10-12 15:23:20
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機(jī)驅(qū)動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd大家好,小弟在做滑膜控制時,發(fā)現(xiàn)在電機(jī)空載時角度能夠觀測正確,但是帶重載后發(fā)現(xiàn)角度誤差就比較大了,多達(dá)180度。請問大家可能是哪里出了問題。
2019-06-04 17:41:51
*與Ualpha、Ubeta應(yīng)該不相等?是不是用Ualpha*、Ubeta*更好點(diǎn)?2、如下構(gòu)造的滑模觀測器模型,為啥說開關(guān)信號中包含了反電勢的信息,低通濾波后就能夠得到反電勢?在滑模面S=0運(yùn)動時,開關(guān)信號等于0,反電勢不也為0嗎?
2016-08-21 15:50:59
1、高頻注入法前面已經(jīng)講過了一種無速度傳感器實(shí)現(xiàn)的方法——滑模觀測器法。在開始一個新的位置估計(jì)策略之前,我們先聊一聊這個方法本身的特點(diǎn)。從前面對滑模的講述可知,滑模觀測器法是通過構(gòu)造一個滑模面,然后
2021-08-27 08:17:23
AN1078構(gòu)造的滑模觀測器中用了es*和z,es*是z經(jīng)過低通濾波后的結(jié)果,我看很多地方就直接利用es*(vs-es*)。由于es*是z經(jīng)過低通濾波后的結(jié)果,所以感覺AN1078將估算的反電勢減了
2016-08-21 15:44:47
前言:PMSM常見的無感FOC方法,以滑模SMO最為知名。尤其在現(xiàn)階段SPM更為廣泛應(yīng)用的低壓小功率電機(jī)領(lǐng)域,高頻注入HFI更多應(yīng)用在初始啟動階段。滑模的實(shí)質(zhì)是基于PMSM的反電勢模型,讓系統(tǒng)進(jìn)入
2021-08-17 07:17:07
根據(jù)如下公式應(yīng)該就能直接計(jì)算反電勢,然后算得角度哇,為啥還要構(gòu)造滑模觀測器呢?
2016-08-21 15:58:08
pmsm無感ekf永磁同步電機(jī)無感foc控制,采用ekf觀測器。帶原理圖,代碼純手寫,方便移植。用于學(xué)習(xí),用于學(xué)習(xí)。
2021-08-27 06:28:10
…………………………………………………………………………… 113第2部分 進(jìn)階篇第5章 基于基波數(shù)學(xué)模型的三相永磁同步電機(jī)無傳感器控制………………… 1175.1 傳統(tǒng)滑模觀測器算法……………………………………………………… 1175.1.1
2019-12-03 14:59:13
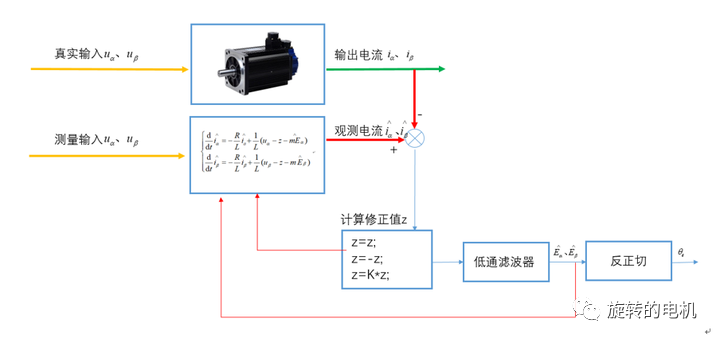
、理論與現(xiàn)實(shí)的差異2.2 、仿真驗(yàn)證而已2.3 、誤差校正3、轉(zhuǎn)子位置觀測器3.1、搭建一個真正的觀測器3.2、看看效果引言上一篇文章中提到了使用滑膜觀測器通過估計(jì)反電動勢實(shí)現(xiàn)轉(zhuǎn)子位置解算,本質(zhì)上
2021-06-29 07:10:38
的問題,該文提出一種基于滑模觀測器的電流偏差解耦控制方法。通過計(jì)算偏差解耦控制電流的耦合項(xiàng),發(fā)現(xiàn)相對于傳統(tǒng)電壓前饋解耦,偏差解耦的耦合項(xiàng)簡單且易于控制,解決了傳統(tǒng)電壓前饋解耦控制解耦效果不理想的問題。通過電流滑模觀測器的跟蹤特性,將定子電流的估計(jì)值作為狀態(tài)變量,反饋到系統(tǒng)輸入端,...
2021-08-27 06:41:40
提示:文章寫完后,目錄可以自動生成,如何生成可參考右邊的幫助文檔永磁同步電機(jī)的無感控制(一)——— 傳統(tǒng)的滑模觀測器前言1、傳統(tǒng)滑模觀測器的設(shè)計(jì)2、傳統(tǒng)滑模觀測器的仿真2.1傳統(tǒng)滑模觀測器的仿真搭建
2021-08-27 08:07:21
滑模觀測器SMO例程中定義的數(shù)據(jù)結(jié)構(gòu)有下面兩個參數(shù)v.Fsmopos和v.Gsmopos:#define SMO_CONST_MACRO(v) \ \ v.Fsmopos = exp((-v.Rs
2020-07-18 14:06:03
我測試LEVEL4,滑模觀測器顯示的轉(zhuǎn)速600RPM,而電機(jī)實(shí)際轉(zhuǎn)速為300RPM,滑模是其的2倍,這是為啥呢?
2021-06-13 20:25:13
在matlab的simulink仿真模塊里面進(jìn)行仿真SPWM時怎么設(shè)置調(diào)制比?如何實(shí)現(xiàn)空間矢量面寬調(diào)制SVPWM的仿真輸出?
2015-08-05 18:12:25
與應(yīng)用、Stateflow有限狀態(tài)機(jī)、虛擬現(xiàn)實(shí)工具箱等中高級使用方法,最后還介紹了半實(shí)物仿真技術(shù)與實(shí)時控制技術(shù)。 基于MATLAB/Simulink的系統(tǒng)仿真技術(shù)與應(yīng)用簡介:1,系統(tǒng)仿真技術(shù)與應(yīng)用2,MATLAB
2008-06-19 13:15:29
PMSM無傳感器矢量控制原理PSoC4簡介基于PSoC4的無傳感器矢量控制方案基于PSoC4的設(shè)計(jì)實(shí)例
2021-02-24 06:12:44
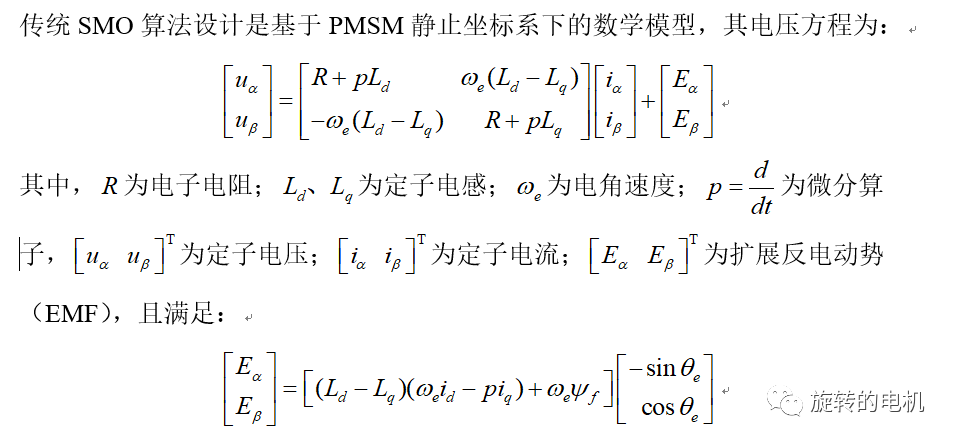
對于觀測器的設(shè)計(jì),一般會選取一個數(shù)學(xué)模型進(jìn)行參照。而對于PMSM而言,一般會根據(jù)電機(jī)的電壓模型或者電流模型來設(shè)計(jì)觀測器。由于電機(jī)的負(fù)載狀態(tài)會影響擴(kuò)展反電動勢的大小,而電機(jī)在高速重載的情況下,定子電流將會有較大的變化。因此,對于估算擴(kuò)展反電動勢的滑模觀測器,按照PMSM的電流模型來設(shè)計(jì)會更合理。
2021-08-27 06:52:55
鏈的觀測精度。仿真和實(shí)驗(yàn)結(jié)果表明基于ISOGI的定子磁鏈觀測器是可行的。引言永磁同步電機(jī)因其結(jié)構(gòu)簡單、維護(hù)成本低、效率高等優(yōu)點(diǎn)而在風(fēng)力發(fā)電、電動汽車驅(qū)動等領(lǐng)域得到廣泛應(yīng)用。永磁同步電機(jī)的直接轉(zhuǎn)矩控制
2018-10-19 09:55:40
直播內(nèi)容:
針對無感FOC位置觀測器如下亮點(diǎn):
1.無速度閉環(huán)啟動
重載或者額定負(fù)載啟動
啟動平滑無抖動
可高速運(yùn)行3000hz也能正常工作
耐電機(jī)高低溫(-35度-130度)電機(jī)正常工作
低速
2023-06-14 11:36:04
如何去實(shí)現(xiàn)一種基于磁鏈模型的非線性觀測器設(shè)計(jì)呢?如何對其模型進(jìn)行仿真?其波形是怎樣的?
2021-11-19 07:34:36
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機(jī)驅(qū)動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd如圖,異步電機(jī)無速度傳感器控制中,觀測器在觀測磁鏈時需要用到轉(zhuǎn)速信息,而在速度估計(jì)時有需要用到磁鏈的信息,這樣不矛盾嗎?
2019-05-21 09:48:53
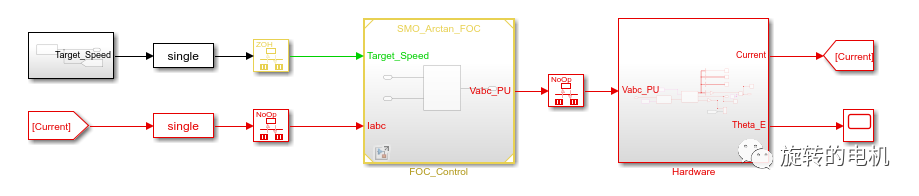
(無.lib文件)。本次直播,主講無感FOC框架.MATLAB,SIMULINK從0搭建一個FOC框架,并代碼生成。無感觀測器算法原理及代碼生成。
這是搭建的MATLAB模型,可以仿真電機(jī)參數(shù)和算法
2023-05-26 14:00:49
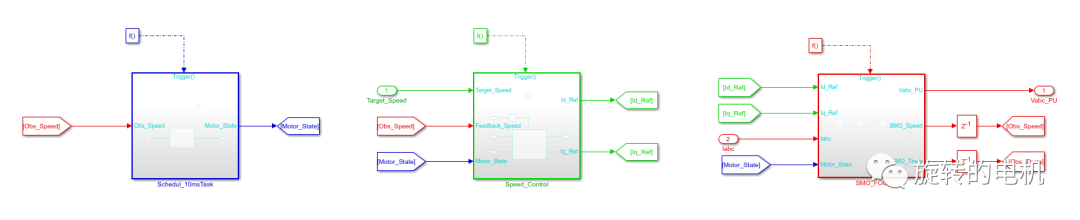
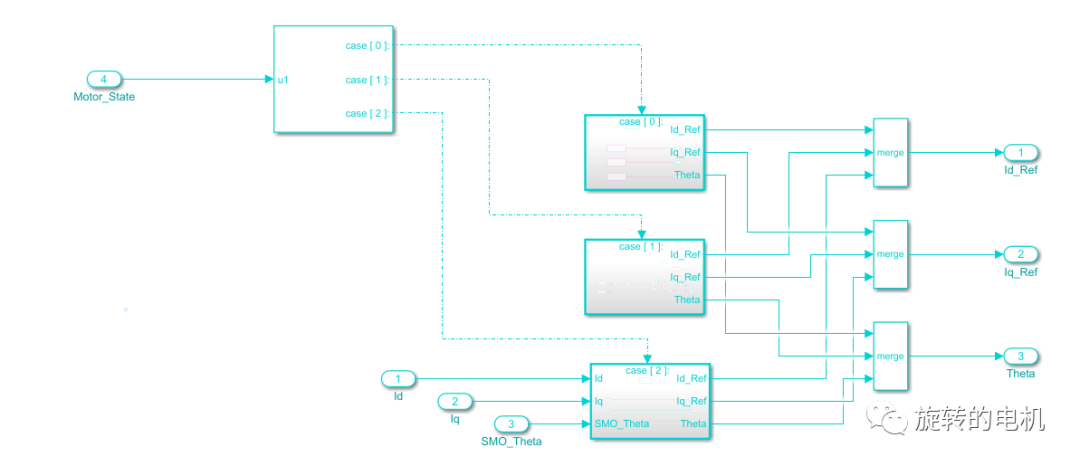
FOC框架基本完成,那么往下我們講無感觀測器
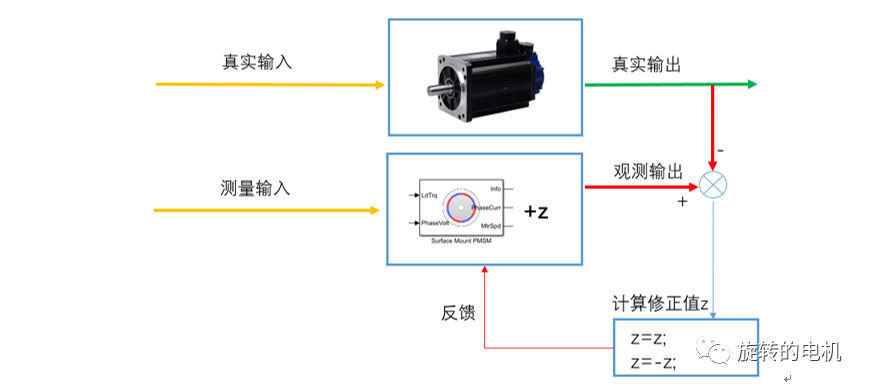
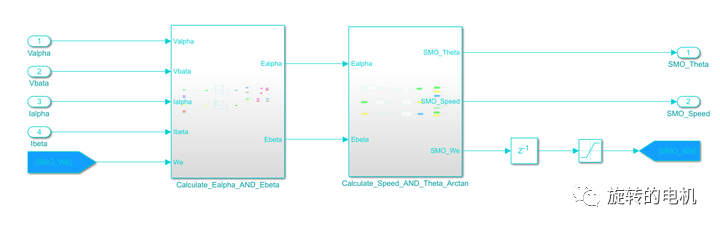
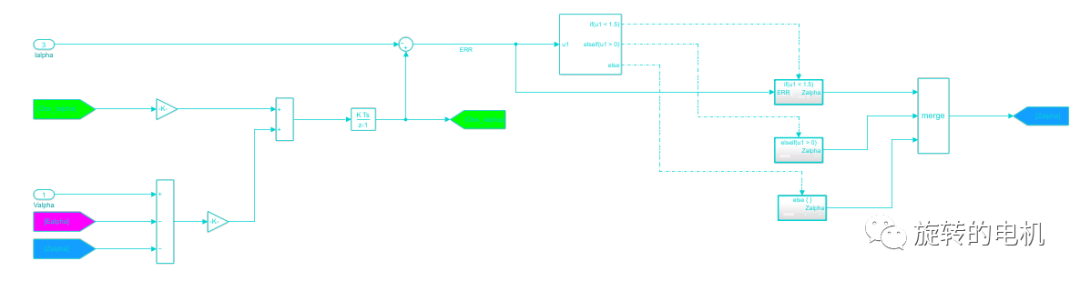
無感觀測器是基于電流積分誤差估算的PLL位置鎖相觀測器:該觀測器優(yōu)點(diǎn):重載啟動,耐高低溫,表貼凸極一樣好用。我們來看看觀測器公式:
通過引入Kd,Kq來消除
2023-05-29 10:11:10
FOC框架基本完成,那么往下我們講無感觀測器
無感觀測器是基于電流積分誤差估算的PLL位置鎖相觀測器:該觀測器優(yōu)點(diǎn):重載啟動,耐高低溫,表貼凸極一樣好用。我們來看看觀測器公式:
通過引入Kd,Kq來消除
2023-05-28 12:33:39
FOC框架基本完成,那么往下我們講無感觀測器
無感觀測器是基于電流積分誤差估算的PLL位置鎖相觀測器:該觀測器優(yōu)點(diǎn):重載啟動,耐高低溫,表貼凸極一樣好用。我們來看看觀測器公式:
通過引入Kd,Kq來消除
2023-05-29 10:12:34
永磁同步電機(jī)無傳感器控制!基于非奇異終端滑模觀測器。模型的轉(zhuǎn)速估計(jì)已經(jīng)很好了,初始階段信號難以提取,有點(diǎn)誤差很正常呀!模型調(diào)參花了我一些時間,所以比有傳感的模型稍貴一點(diǎn),這很良心了。哈哈哈!...
2021-08-27 07:49:30
最好是基于滑模觀測器,其他可以商量
2020-11-28 21:18:29
有償求 基于滑膜觀測器的永磁同步電機(jī)無位置傳感器研究的例程
2019-06-12 14:48:32
高頻注入永磁同步電機(jī)無感控制,采用高頻注入啟動,高速采用磁鏈觀測器,包含電阻、電感、磁鏈參數(shù)辯識。算法全部手寫,方便移植到其他平臺。用于學(xué)習(xí),用于學(xué)習(xí)。
2021-08-27 07:16:52
永磁同步電機(jī)無感foc位置估算源碼無刷直流電機(jī)無感foc源碼,無感foc算法源碼速度位置估算部分代碼所使用變量全部使用國際標(biāo)準(zhǔn)單位,使用不到60行代碼實(shí)現(xiàn)完整的位置速度觀測器。提供完整的觀測器文檔
2021-07-05 06:50:37
永磁同步電機(jī)無感代碼,使用的滑膜觀測器和鎖相環(huán)
2021-08-27 07:48:38
上一篇文章,寫到了滑模觀測器的設(shè)計(jì)過程,此過程過后可以得到滑模輸出的擴(kuò)展反電動勢。按照反正切函數(shù)的原理,只需要對擴(kuò)展反電動勢進(jìn)行求解反正切即可。如下所示:但是事實(shí)上,直接通過滑模觀測器輸出的擴(kuò)展
2021-07-13 08:40:34
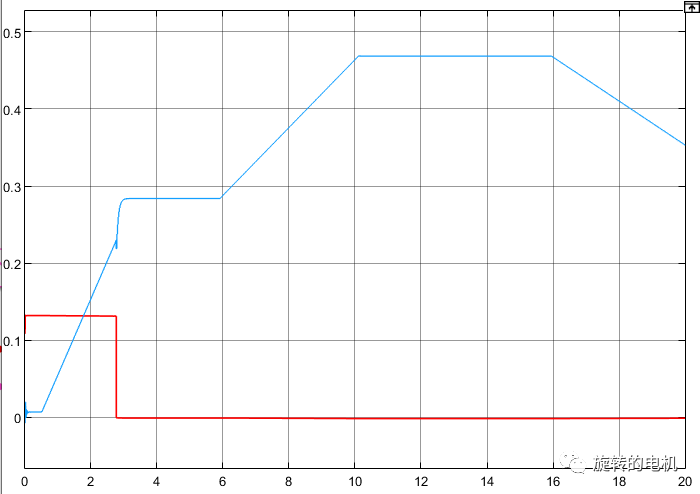
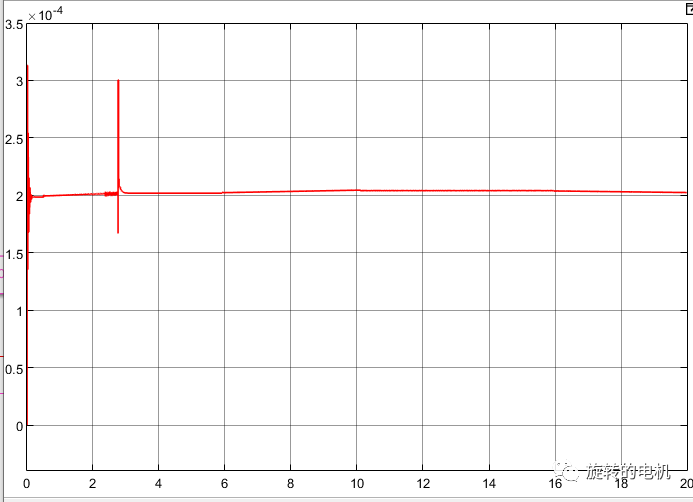
1、滑模仿真框圖2、仿真結(jié)果波形的簡要分析1、轉(zhuǎn)速響應(yīng)曲線 下圖為滑模無位置控制的轉(zhuǎn)速響應(yīng),其中藍(lán)色為估計(jì)轉(zhuǎn)速,內(nèi)部被遮蓋的為實(shí)際轉(zhuǎn)速,可以從圖中看出,估計(jì)轉(zhuǎn)速和實(shí)際轉(zhuǎn)速基本重合,驗(yàn)證了滑模觀測器
2021-08-27 06:47:54
和雙矢量或者可以成為三矢量的有限集預(yù)測控制)和無差拍預(yù)測控制,模型預(yù)測控制可以是單環(huán)模型預(yù)測控制和雙環(huán)模型預(yù)測控制,(基于龍伯格負(fù)載觀測器)(foc控制)轉(zhuǎn)矩,本人自己做的,有不懂的也可以交流一下,+v:lang1578382118,數(shù)字是企鵝,有需要的可以來找我...
2021-07-05 07:18:55
一.內(nèi)容開始進(jìn)行無霍爾的學(xué)習(xí),首先根據(jù)原理及仿真,初步了解實(shí)現(xiàn)方法。二.知識點(diǎn)1.傳統(tǒng)滑模觀測器設(shè)計(jì)電機(jī)電壓方程:擴(kuò)展反電動勢:由式2可以得知,擴(kuò)展反電動勢的大小和電機(jī)的轉(zhuǎn)速、定子電流id和定子電流
2021-07-09 06:25:15
在網(wǎng)上找了找沒有找到,哪位大神有PMSM的滑模觀測器的例程程序,郵箱留下:hykxqq@163.com
2018-10-12 14:50:45
無感Foc電機(jī)控制算法采用滑膜觀測器,啟動采用Vf,全開源c代碼,全開源,啟動順滑,很有參考價值。帶原理圖,筆記僅僅展示一部分,都是我自己做的,版權(quán)所有。
2021-08-27 07:34:20
請問那位大神有《詳解MATLAB/Simulink通信系統(tǒng)建模與仿真劉學(xué)勇》這本書啊,求發(fā)郵箱 liu406698526@163.com.感激不盡!!!
2013-05-28 15:34:20
現(xiàn)在課題需要,要做一個四階系統(tǒng)的狀態(tài)觀測器設(shè)計(jì),基于matlab設(shè)計(jì),四種(全維觀測器 降維觀測器 自適應(yīng)觀測器 滑模觀測器),并且在matlab里仿真后對其性能進(jìn)行比較(穩(wěn)態(tài)精度,動態(tài)響應(yīng)速度
2013-04-16 10:13:13
基于滑模觀測器的永磁同步電機(jī)SPMSM無位置傳感器仿真
2021-08-27 07:24:21
現(xiàn)代永磁同步電機(jī)控制原理及MATLAB仿真,本讀書筆記主要把《現(xiàn)代永磁控制電機(jī)原理及MATLAB仿真》書中關(guān)于電控算法的介紹扣出來,主要是PI控制器和滑膜控制器。
2021-07-09 06:58:10
開源程序、基于查詢表的弱磁控制、基于最大轉(zhuǎn)矩電流比MTPA及電壓反饋的弱磁控制、直接轉(zhuǎn)矩控制DTC、自抗擾控制ADRC、基于高頻注入、卡爾曼濾波、模型參考自適應(yīng)MRAS、滑模觀測器SMO的無速度傳感器
2019-07-29 15:41:00
學(xué)習(xí)了TI的SMO算法程序,發(fā)現(xiàn)其中電感是不區(qū)分dq軸的,這樣對于凸極電機(jī)是否還能夠保證觀測的精度呢?有沒有用過這個算法來做控制的?能否給點(diǎn)參考意見,謝謝啦!我看了下,如果區(qū)分dq軸,那么alpha
2018-12-17 14:54:33
有滑膜控制的仿真么?
2018-11-25 14:19:20
負(fù)載轉(zhuǎn)矩觀測器的設(shè)計(jì)與仿真實(shí)現(xiàn)假定負(fù)載轉(zhuǎn)矩在永磁同步電機(jī)控制系統(tǒng)中被認(rèn)作外部負(fù)載擾動,負(fù)載是不可測的,但是可觀的。從而,依據(jù)PMSM數(shù)學(xué)模型(1)中進(jìn)行負(fù)載轉(zhuǎn)矩觀測器的設(shè)計(jì),具體如下:1.1負(fù)載轉(zhuǎn)矩
2021-09-15 07:56:33
龍貝格負(fù)載轉(zhuǎn)速觀測器pmsm永磁電機(jī) 可提供文檔
2021-08-31 09:04:59
系統(tǒng)設(shè)計(jì):狀態(tài)觀測器的設(shè)計(jì)及其響應(yīng)3.0 實(shí)驗(yàn)設(shè)備PC 計(jì)算機(jī)1 臺(要求P4-1.8G 以上)、MATLAB6.X 軟件1 套。3.1 實(shí)驗(yàn)?zāi)康蘑賹W(xué)習(xí)狀態(tài)觀測器的設(shè)計(jì)方法。②
2009-05-15 00:03:29 28
28 對矢量控制系統(tǒng)動態(tài)結(jié)構(gòu)進(jìn)行了研究, 應(yīng)用狀態(tài)估計(jì)與狀態(tài)觀測器理論, 提出了新型磁通觀測器結(jié)構(gòu)和速度推算方法, 對控制系統(tǒng)進(jìn)行建模, 并用仿真實(shí)驗(yàn)證明所提方案的磁通觀測器
2009-07-17 08:22:0126 MIMO-OFDM的matlab和simulink仿真程序或模型(有OFDM的simulink仿真模型):關(guān)于MIMO-OFDM的matlab和simulink仿真程序或模型(有OFDM的simulink仿真模型,有mimo-ofdm的信道估計(jì)仿真程序)。里面包含7個文
2010-02-08 14:38:21538 基于MatLab/Simulink的GPS系統(tǒng)仿真:快速可靠的GPS (全球定位系統(tǒng))系統(tǒng)仿真可對雙頻GPS 接收機(jī)的設(shè)計(jì)、接收算法的研究提供有效的幫助。文中詳細(xì)介紹了在MatLab/Simulink 環(huán)境下GPS 系統(tǒng)仿
2010-02-08 14:55:27112 電路實(shí)驗(yàn)與Matlab/Simulink仿真:摘要:在探索和研究電路實(shí)驗(yàn)的改革創(chuàng)新過程中,分析電路實(shí)驗(yàn)存在的不足,對電路實(shí)驗(yàn)提出改進(jìn)的措施.提出采用工程軟件Matlab/Simulink進(jìn)行電路仿真
2010-04-14 08:26:59167
基于MATLAB Simulink的系統(tǒng)仿真技術(shù)與應(yīng)用 教材
目錄第一章 系統(tǒng)仿真技術(shù)與應(yīng)用
2010-04-29 14:51:580 討論直接轉(zhuǎn)矩控制方法在永磁同步電機(jī)中的應(yīng)用問題,利用MATLAB仿真工具對永磁同步電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)仿真。針對直接轉(zhuǎn)矩控制低速時存在較大轉(zhuǎn)矩脈動的問題,采用觀測器方
2010-12-28 10:40:2615 基于MATLAB的simulink仿真2Fsk調(diào)制解調(diào)
2015-11-12 10:36:1832 基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究
2015-12-29 10:32:500 matlab仿真詳解好看的MATLAB書籍。
2016-02-19 15:44:2631 《Matlab Simulink與控制系統(tǒng)仿真》,感興趣的小伙伴們可以看看。
2016-08-09 17:33:1381 MATLAB SIMUlink 與控制系統(tǒng)仿真 王正林等編
2016-12-10 13:33:080 基于負(fù)載轉(zhuǎn)矩觀測器的PMSM抗負(fù)載擾動控制策略_荀倩
2017-01-05 15:34:548 帶擾動觀測器的網(wǎng)側(cè)逆變器高階終端滑模控制_吳忠強(qiáng)
2017-01-07 16:52:061 基于卡爾曼濾波滑模變結(jié)構(gòu)轉(zhuǎn)子位置觀測器的PMSM無差拍控制_邱忠才
2017-01-07 17:01:106 基于干擾觀測器的飛行仿真轉(zhuǎn)臺完全跟蹤控制_陳松林
2017-01-08 11:20:200 帶阻抗觀測器的單相逆變器抗擾控制_閆士杰
2017-01-07 15:34:270 基于MATLAB-Simulink的BLDC直接轉(zhuǎn)矩控制系統(tǒng)仿真-李曉竹
2017-01-21 12:00:2921 基于MATLAB通信仿真及應(yīng)用實(shí)例詳解
2017-09-04 09:01:5349 代替常用的電壓一電流模型的方法,結(jié)合直接轉(zhuǎn)矩控制、空間矢量脈寬調(diào)劑技術(shù)以及船槳模型,建立基于PI-PLL磁鏈觀測器的SVM-DTC系統(tǒng)仿真模型,仿真結(jié)果表明,定子磁鏈觀測的精度大幅提高,系統(tǒng)的性能有所改善。
2017-11-08 11:18:4916 絡(luò)拓?fù)錇橛邢驁D且在切換拓?fù)鋱D的情況下給出基于觀測器的自適應(yīng)控制協(xié)議。利用Lyapunov穩(wěn)定性理論和矩陣?yán)碚摲治觯玫绞瓜到y(tǒng)實(shí)現(xiàn)一致性的充分條件。仿真結(jié)果表明,在局部觀測器和控制協(xié)議及自適應(yīng)控制下,跟隨者可以跟蹤到
2018-02-08 16:54:360 系統(tǒng),并對傳感器集成浮球的正弦定深控制和爬坡定深控制進(jìn)行了M atlab仿真分析,以深度偏差平方作為評判標(biāo)準(zhǔn),分析了常規(guī)PID和干擾觀測器PID的控制效果。研究結(jié)果表明,與常規(guī)PID定深控制相比,基于干擾觀測器的PID可以觀測和抑制外界干擾對系統(tǒng)
2018-03-26 10:18:370 SIMUUNK是MATLAB提供用來對動態(tài)系統(tǒng)進(jìn)行建模、仿真、分析的軟件包。SIMULINK包含許多模塊庫,利用這些模塊庫可以很方便的進(jìn)行復(fù)雜系統(tǒng)構(gòu)建與仿真分析,為研究者提供了一個實(shí)用的仿真平臺。本文對基于MATLAB/SIMULINK異步電動機(jī)的直接轉(zhuǎn)矩控制離散系統(tǒng)仿真模型做出分析和介紹。
2019-10-17 07:57:003834 
本文檔的主要內(nèi)容詳細(xì)介紹的是Matlab與系統(tǒng)控制simulink仿真的PPT課件合集免費(fèi)下載包括了:SIMULINK仿真基礎(chǔ),Matlab及其應(yīng)用 動態(tài)系統(tǒng)仿真——Simulink,測試系統(tǒng)
2019-07-02 08:00:0022 基于MATLAB_Simulink的光伏電池建模與仿真說明。
2021-04-28 11:14:56101 基于Matlab/Simulink的車輛起步過程的仿真說明。
2021-06-03 15:07:1743 基于觀測器的多智能體有限時間包含控制問題
2021-06-23 15:14:42120 基于滑模觀測器的永磁同步電機(jī)控制系統(tǒng)設(shè)計(jì)
2021-08-24 09:32:289 自己做的PMSM SMO,性能優(yōu)越,放心取用
2022-09-05 09:17:571 導(dǎo)讀:本期文章主要介紹在MATLAB/simulink中建模時的兩種不同實(shí)現(xiàn)方式,一種是直接用現(xiàn)成的文件庫中的模塊進(jìn)行搭建,一種是用Sfunction代碼實(shí)現(xiàn)。接下來以電壓型磁鏈觀測器為建模目標(biāo),來比較這兩種實(shí)現(xiàn)建模方式的各自優(yōu)勢。
2022-09-15 10:07:411421 導(dǎo)讀:本期文章主要介紹在MATLAB/simulink中建模時的兩種不同實(shí)現(xiàn)方式,一種是直接用現(xiàn)成的文件庫中的模塊進(jìn)行搭建,一種是用Sfunction代碼實(shí)現(xiàn)。接下來以電壓型磁鏈觀測器為建模目標(biāo),來比較這兩種實(shí)現(xiàn)建模方式的各自優(yōu)勢。
2022-09-15 10:10:524292 導(dǎo)讀:本期主要介紹異步電機(jī)的全階磁鏈觀測器。從工作原理到帶入到矢量控制中,比較不同觀測器的估計(jì)效果對電機(jī)控制性能的影響大小。
2022-11-08 09:34:323284 系統(tǒng)仿真(Simulink)環(huán)境是MATLAB最早開發(fā)的基于框圖的仿 真平臺。 Simulink是Simulation和Link兩個英文單詞的縮寫,意思 是仿真鏈接,MATLAB模型庫都在此環(huán)境中使用,從模型庫中提 取模型放到Simulink的仿真平臺上進(jìn)行仿真。
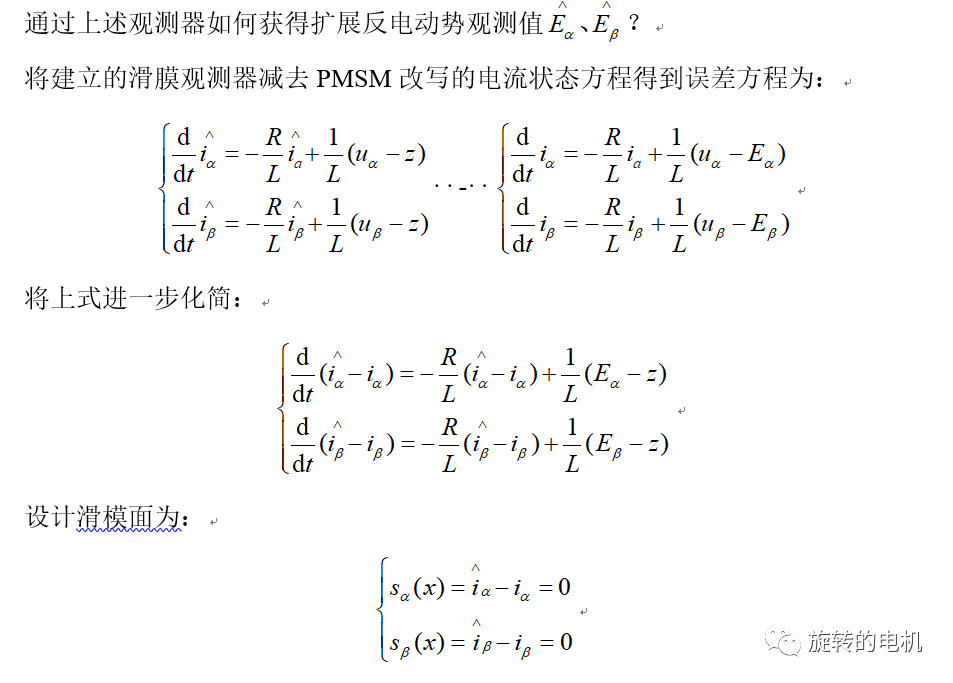
2022-11-08 16:16:4010 1、自適應(yīng)滑模觀測器算法 對于表貼式三相PMSM重寫靜止坐標(biāo)系下的電流方程為為了設(shè)計(jì)SMO首先定義滑模面函數(shù)為設(shè)計(jì)自適應(yīng)SMO為 將兩個電流方程相減可得由于系統(tǒng)進(jìn)人滑模面后,即有所以可得到反電動勢
2023-03-15 09:53:201 本章節(jié)采用龍伯格觀測器進(jìn)行永磁同步電機(jī)的無傳感器控制,首先分析了龍伯格觀測器的原理,然后設(shè)計(jì)了PMSM的全階龍伯格觀測器,最后通過Matlab/Simulink對該觀測器方案進(jìn)行仿真分析,為了進(jìn)行
2023-06-08 14:46:031988 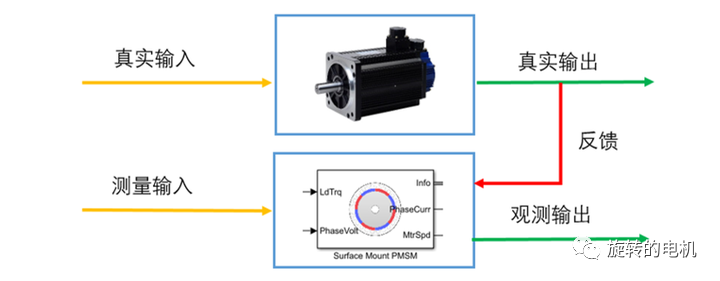
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論