 電子發燒友App
電子發燒友App


電機在現代社會中是個再普通不過的機電類產品,電機技術的成熟運用,使得這種能把電能轉換為機械能的設備可以說是無處不在了,近到我們隨身攜帶的手機,遠到探索星際的飛船都有它們的存在。它們有著多種多樣的分類和用途,能制成大大小小的體積,實現各種各樣的控制、傳動需求,是機電一體化設備中有著不可取代的地位。在電子愛好者中它們一樣有著十足的用武之地,能制作各式各樣的小型機器人、遙控玩具車船、散熱設備、電動工具、甚至是簡易的發電裝備等等。這個系列的文章就是簡單的對一些常用的小型電機做介紹,大家一起了解和使用這些讓我們著迷的小精靈。
直流電機如何工作
直流電機,英文directcurrent machine,DC machine,在百科的詞條中是這樣定義的:將直流電能轉換成機械能(直流電動機)或將機械能轉換成直流電能(直流發電機)的旋轉電機。在一些地方俗語中會稱之為馬達、摩打等,多為英文的音譯。
從英國科學家邁克爾.法拉第(Michael Faraday)發明世界第一臺電機到現在已經有199年的歷史了(1821年),直流電機的制造及應用技術已經是相當成熟的了。回頭看看法拉第的第一臺電機是怎么樣子的呢?他的實驗是在一個碟子中倒入水銀,其中為永磁鐵,在碟子上面懸掛一導線,導線一端連接電池的正極,另一端則浸泡在水銀中,水銀則和電池負極相連,水銀有導電性和流動性,在這里就充當了電刷的角色了。電流通過導線,產生磁場,和放置在碟子中的磁鐵產生相互作用力,這使得導線翹起圍著磁鐵旋轉。圖一就是原始的法拉第實驗示意圖。雖然這個實驗中的裝置并沒有實用的價值,但從原理上是符合了直流電機的定義,我們也可以用這個實驗原理仿制一些小的電動機實驗玩具。
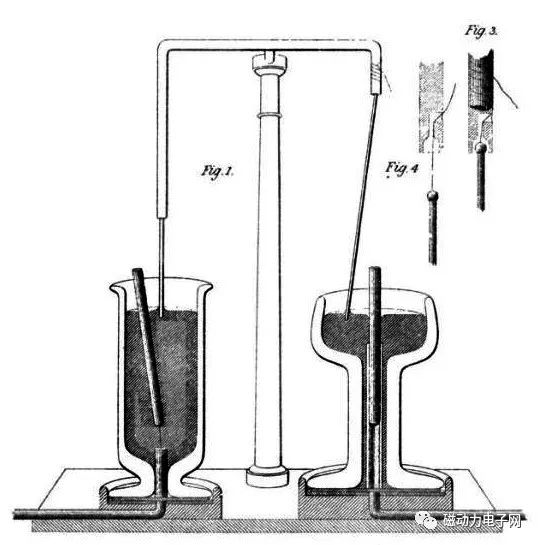
圖一
一個利用這個原理制作的最簡單電機實驗,制作用料很簡單,電池、銅絲和圓柱形釹鐵硼磁鐵塊。制作方法是先把銅絲做成直徑比電池直徑略大一點的銅絲圈,把圓柱形釹鐵硼磁鐵塊吸在電池的負極,銅絲圈接口處的銅線放在正極上相當于電機上的轉軸,銅絲圈的另一端接觸到電池負極下的磁鐵塊,釹鐵硼磁鐵塊具有導電性就相當于直流有刷電機中的電刷,放置好后電流流過銅圈,產生磁場,當和釹鐵硼磁鐵塊的磁場相互作用時,線圈就轉動了(注:圖中釹鐵硼下面的普通磁鐵塊只起固定作用,可以不使用)。有興趣的朋友可以做來哄小朋友,簡單而又有教學作用。
然而法拉弟并沒有把這個實驗實用化,直到1832年,電磁鐵的發明者英國的威廉.斯特格恩(William Sturgeon)制作出第一臺具有實用性的四芯電機,最重要的這個電機已具有了電刷來換相,是現代電機的原形。它的原理圖如圖三。到了1834年,美國人托馬斯·達文波特ThomasDavenport制造出第一輛直流電機驅動的電動車模型,如圖四。雖然現代的直流電機和它們的老祖宗在性能及造型上有著天壤之別,但是其基本原理結構的組成要素都是一樣的,只是實現的形式不同了。在商業化供電網還沒出現之前,電機只能靠酸性電池來做能源,能源問題使得電機的發展一度停滯不前。而今,在網絡供電時代,電機的能源供給問題得以解決,電機得以飛速的發展,同時借助越來越先進的驅動控制技術,不單單是可以實現輸出更大的動力,而且能實現更高速和準確的控制。
以上那個小實驗我們可以直觀的看到電流流過處在磁場中的導體時,會受到一種力的作用。電機正因為受到這種力的作用才會轉動。這種力稱之為洛倫茲力,是荷蘭物理學家洛倫茲最先提出這個觀點,它是指運動電荷在磁場中所受到的力,即磁場對運動電荷的作用力,力作用方向與電流方向和磁場方向都保持垂直。洛倫茲力的作用方向可以用左手法則來確定。那么如何使用左手法則來判定洛倫茲力的方向呢?還是用上面那個電機小實驗來說明,如圖五,首先我們要找出磁力線的方向,可以借助指南針,或手機上的電子指南針,指南針的南(S極)會指向磁場的N極,這樣就可以得知磁力線的方向,從N極指向S極,電流方向是從電源正極指向負極,得知這2個方向后,伸出左手,拇指與其余四指呈90度,四指指向電流方向,拇指指向磁場方向,那么掌心所對的方向就是洛倫茲力的作用方向,所以這時銅圈就會做逆時針旋轉。也可以參看圖六來理解通電導體在磁場中的受洛倫茲力作用的情況,您也可以試著伸出左手在這圖上試試左手定則。

圖五

圖六
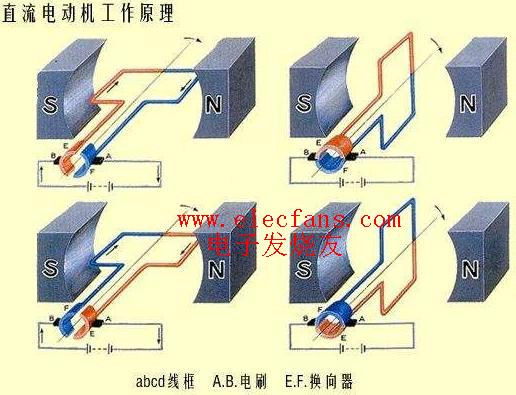
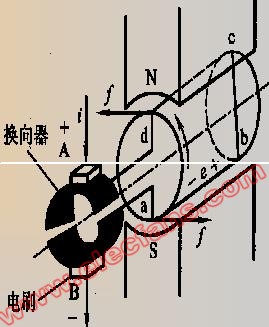
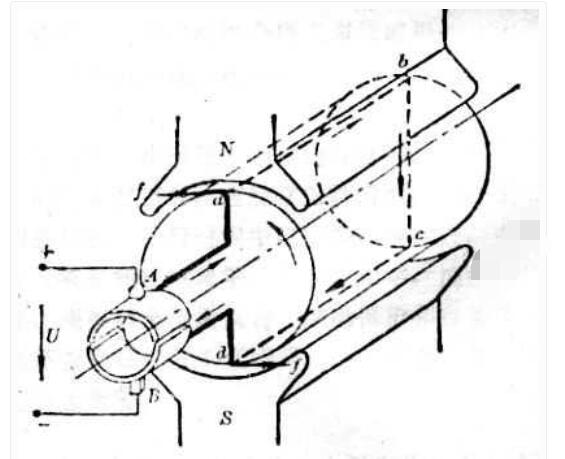
細心的讀者可以看出上面那個銅圈在電路中最多只算是兩段通電的導體,兩者電流方向是一致的,但所處位置不同,受到的磁場作用有所不同,受力后導體位置不斷改變,所處在磁場位置也變化,受力不會平衡,所以會旋轉起來。然而我們使用的電機在原理上并不可能用這樣的結構,實際上常見的直流電機用于產生磁場的導體是做成環狀的線圈,電源連接于線圈的二端,其原理結構如圖七。我們同樣可以使用左手定則來分析環形線圈在磁場中的受力情況。從圖中可以看到,環形線圈中,電流的走向可以分為兩段,A、B兩段的方向正好相反,使用左手定則分開來分析得出A段受到向上的力,而B段受到向下的力,當線圈平面沒有處于鉛垂位置時,兩股力會形成力矩使得線圈向順時針方向轉動,當到達鉛垂位置時,A段向上的力與B段向下的力在同一垂直線上,不產生力矩,這時達到平衡停止轉動。為了繼續旋轉,必須改變一下電源的極性,極性改變后A段受向下的力,B段受向上的力,受力狀態在極性改變的瞬間被打破,繞圈繼續順時針方向轉動,直到再次到達鉛垂位置再次平衡。由此可知,只要在鉛垂位置上進行電源極性轉換,線圈就會一直轉動下去,這種方式也已被廣泛用于大多數的直流電機中,這種交替改變線圈中電流方向的過程稱為換向。常見的永磁直流電機中實現轉向功能的裝置有換向器和電刷。

圖七
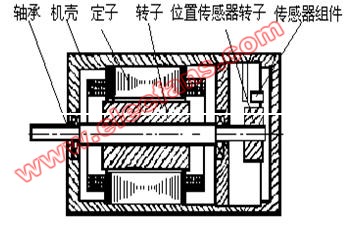
通過拆解小型直流電機來了解一下常用小型直流電機的主要組成部分,如圖八,直流電機主要由以下幾個主要組成部分所組成:
轉子 轉子的結構是在電機中心軸上固定單匝或多匝線圈,線圈通過電刷連接到換向器獲取交替變化的電流,使其在磁場洛倫茲力的作用下,產生旋轉的轉矩并通過中心軸輸出。圖八中間所示的就是轉子,電機軸上面固定了三匝線圈組成一組繞組,線圈引線連接在電刷上。實際使用的直流電機中線圈一般至少為三匝或以上,多線圈組成的繞組目的在于增強洛倫茲力強度以及減少繞組轉動過程中力矩波動導致的轉動不均勻,同時也提高了能量的轉換效率。
** 定子** 定子是圍繞安置在轉子周圍,用于在電機中產生的磁場的裝置。一般小型直流電機的定子多是使用永磁體制作,在大功率的直流電機定子會使用線圈制作的電磁鐵。圖八左邊所示的是定子,由一塊環形圓柱形永磁鐵組成。
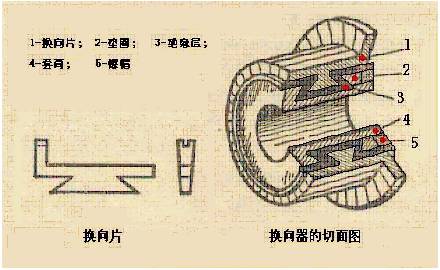
換向器 換向器的結構是二塊分開的金屬彈片,用于接觸電刷來給線圈提供交替變化的電流。換向器是固定的,電機軸在旋轉時,電刷會旋轉的角度變化,交替的換向器二極接觸,變換線圈的電源極性。
在制作機電結合的DIY作品時,我們通常要用到小型的直流電機,那么我們如何選購所需要的電機呢?現今我們不但可以在電子市場上買到需要元件,也可以足不出戶在網絡上購買到需要的元件,但無論我們從那一種渠道購買電機,應該在第一時間向供應商索要或詢問電機的技術參數,最好是廠商提供的技術文檔,當然也可以在網絡上根據電機型號來查找相關的資料。從這些文檔中我們可以詳盡的得知該型號電機的所有詳細技術資料,如外形、安裝尺寸、力矩、電壓、軸長等等,有了這些資料可以在制作項目中更精準的進行設計。然而實際上我們在購買時往往不會索要到這些文檔,對于小廠商生產的產品或是二手貨物,更沒法保證能獲取全部的技術資料,但有些電機會在電機的銘牌或招紙上有標示電壓、功率、轉速等參數。那么愛好者可以在選購時關注以下幾個基本指標,來看商品是否滿足自己的要求:
**輸入電壓、電流 **無論到那購買電機,商家首先都會問“需要多少伏電壓的電機”。常見的小型直流電機的額定輸入電壓有3V、6V、12V、24V和36V。選用時可以根據控制電路所能提供的電壓值去選取合適的電機,盡量不要選用需要電路額外提供電源的電壓值。當然同時也要考慮電機的輸出,同樣功率的電機,而輸入電壓不一樣時,需求的電流是不樣的。6V的電機要輸出和12V電機一樣的功率時,電流則需要后者的2倍。供應商一般不會提供輸入電流值,但比較容易求得,我們將在下面的段落再做討論。
** 轉速 **供應商一般會提供一個轉速值,單位多為r/min(轉/分),常見的小型電機空載轉速一般在5000-20000r/min之間。需要更低轉速時則需要選擇帶減速機構的電機或使用調速電路進行調速。圖九是小型金屬齒輪減速電機。
** 轉矩** 轉矩就是距軸心一定半徑距離上所輸出的切向力。轉矩的單位為牛頓?米(N?m)。如果一個電機的輸出轉矩為1N.m,也就相當于在軸心上安裝一個1米的大圓盤,而電機帶著圓盤的邊緣掛著1公斤重物順利旋轉。如果需要精確要求轉矩,在購買時一定參考詳細的電機的技術文檔。通常是通過對電機增加減速機構來實現增大力矩,但同時會把終端輸出的轉速降低。
** 尺寸** 小型直流電機種類繁多,大小不一,所以在購買時務必要注意其體積大小、定位孔、軸直徑、軸長等關鍵尺寸,以確保電機能正確安裝到設備中去。
除了詢問以上基本技術參數外,如有條件,在購買時可以試著加電或手動使電機轉動,聽聽電機有沒異響,感覺一下轉子是不是轉動順暢。特別是在跳蚤市場上選擇二手電機時,如果轉動不順暢或有異響那可能是電刷、換向器、軸承或減速機構有問題。
當我們手上有一個直流電機時,我們只知它的額定輸入電壓,那么我們可以用如下的方法求得堵轉電流和空載電流。
當電機在運轉時無法帶動負載轉動,轉子停止轉動,形成堵轉,這里所通過的電流也稱之為堵轉電流。因轉子不轉,此時繞組線圈就可以簡單的看成是一個電阻。所以其電流值可以簡單用歐姆定律求得,電流=電壓/電阻。小型直流電機的繞組電阻通常都很小,所以要用精度高的萬用表測得電阻值來計算。如一個6歐的電機,在供電電壓為6V時,堵轉電流就為1安。
空載電流可以直接在電機和電源間串入電流表來直接測得。也可以串入小阻值的功率電阻再測功率電阻二端的電壓值,再用串聯電路公式求得電流。
使用電機時輸入的電壓值不應超過額定值,電機運轉時輸入電壓越高繞組線圈所流過的電流也越大,發熱量也越大,長期工作在電壓超標的狀態,電機的壽命會大大縮短。電機軸上的承受的載荷越大,電流也會越大,同時對于電機軸或減速機構的磨損也越嚴重,所以要使電機壽命延長,電機軸上的載荷越小越好,或是選用更大功率的電機已滿足載荷要求,如果有條件的可以安裝滾珠軸承減少摩擦所增加的額外載荷。要求大轉矩的情況時,可以選擇使用行星齒輪減速電機,基本條件一樣的情況下蝸輪蝸桿以及直齒轉減速電機輸出的轉矩相對會小一些。定期在軸承、減速機構上加注潤滑油保持機件的小摩擦量,一來可以延長電機壽命,二來也可以減輕運轉時的噪聲。在固定電機時使用橡膠墊片,可以減少噪聲及減少對電機及減速機構帶來的沖擊和震動,這在制作機器人或機器小車時很有用。
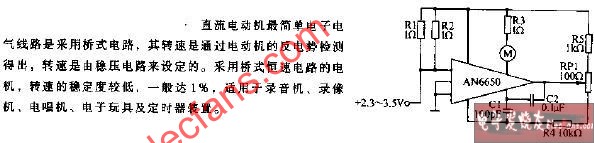
直流電機的驅動方法是最簡單的了,只需要在電極上接下直流電源,電機就可以轉動了,反相接入電源時,電機就反轉。簡單的調速方法就是升降輸入電壓。但是這些簡單的方法只能適用于調節好后就不變的情況。要想方便的調速或換向就需要控制電路進行調節控制。下面介紹最基本的電機控制方法。
雖然可以簡單的通過調節電機的電流來調速,但從原理上可知,這樣會使電路功耗大,發熱也會嚴重。而最普遍使用的一種方法是通過PWM技術,PWM(Pulse Width Modulation)中文全稱脈沖寬度調制,簡稱脈寬調制,是可以用于電機調速且最為有效的方法。其原理就相當于在電機中安裝了一個開關,相象一下在規定的時間里,接通電機的時間為30%和接通電機的時間為20%,前者所消耗的電能要大于后者,那么在全段時間內接通電機的話電機的能耗就是100%,而不接通電機則不消耗電能。比較常用的一種PWM信號是以固定頻率產生脈沖,然后根據需要改變其占空比。高電平持續時間越長,其占空比越大。可以參看圖十來理解,高電平持續看成是電機導通,占空比越大,導通時間就越長,能耗就越大,輸出轉速也就大。另一種產生PWM的方法是把脈沖的占空比固定,改變其頻率,但這種方法需要產生不同的頻率,實現不方便,而且在多種頻率間切換時可能會讓電機產生共振或加大噪聲,一般不使用這種方式生成PWM信號。

圖十
根據PWM的原理,筆者設計制作了一個適用于小型直流電機的PWM調速電路。這是一款簡單而通用的調速電路,使用AVR的ATtiny13單片機生成PWM信號,所以電路極其簡單、靈活,且具有寬電壓輸入,255檔連續可調等功能。圖十一為電路圖。電源部分使用了78L05為單片機提供穩定的5V,其輸入電壓為直流7到30伏,也就使得這個電路的最高支持電壓為30伏,J1接口的1、2腳為電機輸出端口,3、4為電源輸入端口。電機驅動使用了型號為IRL510的MOSFET管,該管G極電壓只需要5V就可以驅動,所以直接用單片機的IO腳就可以驅動,PWM信號控制著MOSFET管的導通,形成了一個高速自動的電源開關,實現PWM原理,其最大負載電流可以達5.6A,可以滿足大部分小型直流電機的需求,如需要實現更大電流的電機調速可以換用功率更大的MOSFET管來實現。tiny13芯片使用內置的復位及震蕩電路,電路十分簡潔,J2為芯片的編程接口。調節部分使用了帶中央按鍵的編碼開關,中央按鍵用于啟停電路,左右旋轉則可以使電機加減速,使用了編碼器可以使得調節更加精準,也不會像使用普通電位器那樣時間久會有阻值變化使得調節失常。圖十二則是筆者用萬用板焊接的本電路。

圖十一
程序的編制也比較簡單,PWM的生成使用芯片內部PWM硬件功能產生,生成PWM頻率約為38KHz,使用硬件生成的好處是不占用系統時間,輸出波形不受代碼影響。圖十三為電路運行時tiny13的5腳輸出的大約40%占空比的PWM波形。本文的程序源碼及編譯好的HEX文件在本文的附件文檔,讀者朋友到 http://diy.cdle.net/?page_id=457下載,或點擊文章下方的“原文閱讀”進行鏈接下載。讀者朋友可以通過修改電路和程序源碼,來修改調節檔數、增加速度保存功能、實現正反轉控制等。本電路除了可以控制有刷電機也可以控制小散熱風扇、LED燈等。

圖十三
小型直流電機要實現正反轉控制,通常是使用H橋電路,用單電源供電可以使電電機雙向運轉。圖十四就是其原理圖,圖中的電路單元是由兩對互補的三極管構成的最基本H橋電路,4個管子聯結形H字形,H橋也因此而得名。當需要順時針正轉時,使三極管A1及A2導通,而B1和B2關斷,電子從電源負極流經A2、電機負極、電機正極、A1,最后到電源正極,這樣在電機二極產生了正向的電壓差,使得電機正轉。同理逆時針反轉時,要使三極管B1及B2導通,A1和A2關斷。

圖十四
繞組線圈其實就是一個大電感,在電路上就是一個感性負載,具有阻礙電流變化的特性,當線圈中的電流變化越快其阻礙能力越大,在線圈斷電的瞬間,電感阻礙電流變化在其兩端產生反向電動勢,電壓幅值可能是原輸入電壓值的數倍。因產生的反向電壓過高,容易造成連接電機的其它元件被反向擊穿,如三極管。通常為了保護電機驅動電路,會在電機兩端并為一個反接的二極管,當有反向電壓產生時,對于這二極管來說正好是正向導通,電流會經二級管流回線圈,消耗掉,形成續流作用,這時二極管二端電壓是其壓降值,從而保護其后的驅動電路,二極管稱為續流二極管。如圖十一中的VD2就是起到續流作用的續流二極管,筆者選用的整流管,如果條件許可續流二極管最好是選用快速恢復二極管或者肖特基二極管。同樣在H橋中也需要續流二極管進行保護,原理圖看圖十五,原理分析和上面的是一樣的。

圖十五
使用續流二極管同時也會產生一些問題,二極管會分流一些電流到電源回路上,可能會造成電壓的瞬變產生干擾噪聲。在使用PWM信號控制的驅動電路中可能會產生更為嚴重的后果就是產生過沖電流,其產生原因是PWM信號關斷三極管,這時產生了反向電壓,續流二極管導通,如果二極管的關斷時間較慢,在二極管還沒關斷時三極管受PWM控制再次導通,這時因為三極管相當于直接導通電源和地線,產生過沖電流及噪聲,其維持時間取決于續流二極管關斷時間,所以要盡可能選用高速的快速恢復二極管或者肖特基二極。同時最好在電源電路上加入旁路電容來平滑電流電壓脈動和吸收噪聲,旁路電容一般選用0.1uf-0.22uf的瓷片或鉭電容。如圖十一中的C2。
小功率的H橋集成芯片有好多型號可以選擇,比較常見的如L293B、L293D、L298、754410、UCN2998等等。這些都很容易在網上或電子市場購買到。這些集成芯片電流多是1、2A的,如果需要更大的電流則需要購買大功率直流電機驅動模塊,常見的有10-30A的,在淘寶網店也有許多。動手能力好的朋友當然也可以用大功率三極管或場管來自制。圖十六是TI公司的LMD18200芯片的典型應用圖,55V耐壓3A電流,應用圖有調速和正向轉控制功能。
本文描述的內容只是直流電機的基本應用基礎,要實現電機的更精確的控制還需要學習反饋、閉環控制等更高級的技術。

圖十六









 工商網監
工商網監
評論