 電子發燒友App
電子發燒友App


近幾年,隨著線陣相機的普及,更多的行業,在機器視覺應用方案中,使用線陣相機。
線陣相機的優勢很突出,困難也很突出 — 開發和部署,比面陣相機更復雜。
這篇文章,把線陣相機的相關基礎知識,做了一個總的梳理和歸納,希望對使用線陣相機的您,有所助益。
1
為什么會需要線陣相機?
客戶使用線陣相機的原因、場景很多,總結起來,基本是下面三個因素:
a.被拍攝物的特殊性
? 運動著的,無限長的被拍攝物,如布匹、鋼帶、薄膜材料、紙張
??傳送帶上大小,顏色、分布各異的產品:果蔬、礦石、金屬零件等
??圓柱形物體:易拉罐、滾筒裝置
b.對光的均勻性,要求很高
??線陣光源比面陣光源,更容易實現打光的均勻性
c.成本考量
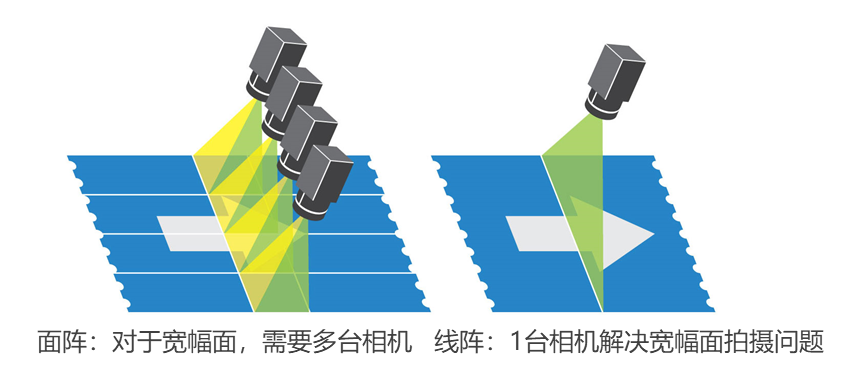
? 1臺線陣相機 vs 多臺面陣相機:成本更低,部署更方便。
??線陣相機 vs 高分辨率面陣相機:成本更低。例如,高分辨率平板檢測行業,使用高分辨率面陣相機,成本很高,而用線陣相機,成本可以低很多。同時,屏幕的外形特點,也對線陣相機很友好:長寬均勻。線陣相機從上往下掃描一遍,可達到高分辨率面陣相機的成像效果。
2
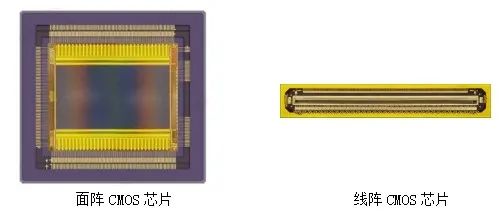
什么是線陣相機?
線陣相機,顧名思義,拍出的圖像,像一條線,故,稱之為線陣相機。
線陣相機和面陣相機的區別,從使用的芯片開始,就大不同:
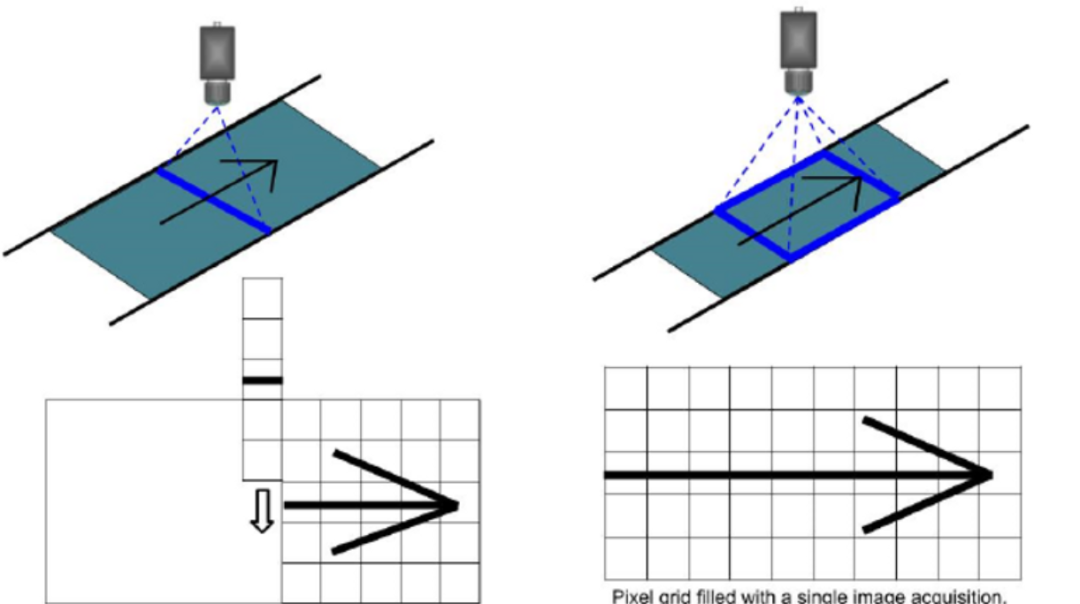
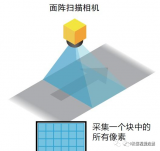
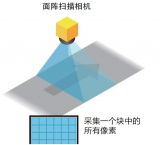
面陣相機和線陣相機每次曝光拍照,成像對比:
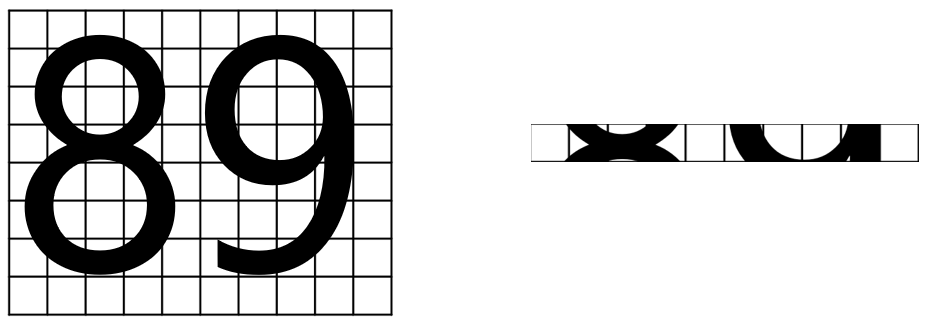
面陣相機
線陣相機
上圖,每個方框,代表1個像素。
3
線陣相機工作原理
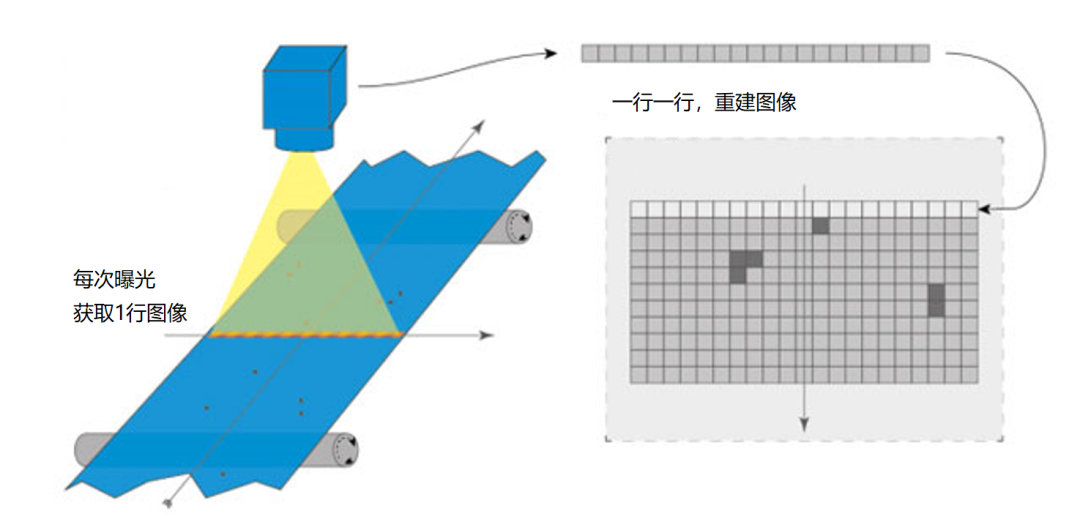
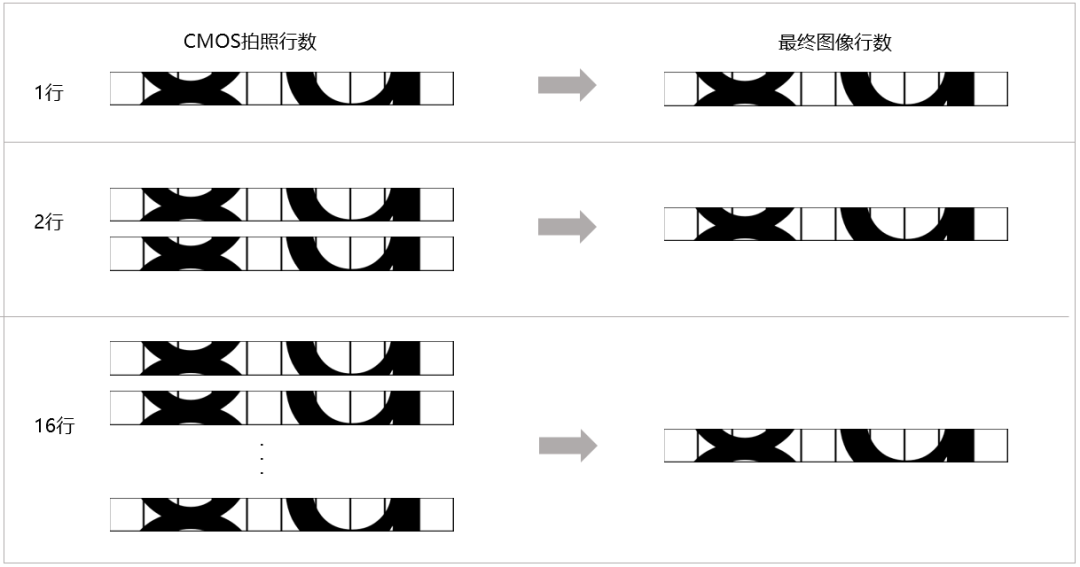
注意:這里說的每次曝光,獲取1行圖像,是指線陣相機里的CMOS傳感器的一行進行了拍照。不表示最終輸出的圖像,就是由這1行CMOS芯片輸出的。最終輸出的圖像,可能是由1行,2行,3行,4行,6行,8行或16行CMOS芯片拍攝的圖像處理而來,最終獲得1行圖像。
4
線陣相機怎么拍出一幅“面陣”圖像?
在電腦里看到的圖像:
??每一行圖像,是線陣相機拍1-16行,再進行圖像處理后得來(不排除未來還會有超過16行的應用)
??每一幅圖像,是每一行圖像拼接而來
5
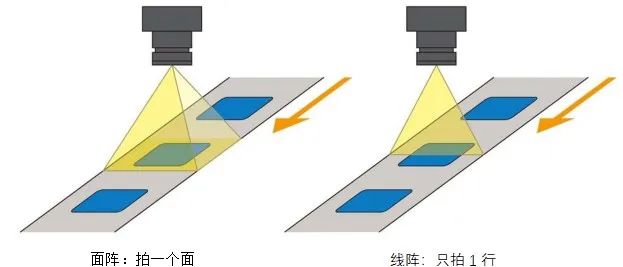
線陣和面陣相機的拍照方式不同點
?
6
線陣相機 vs 面陣相機,主要優勢
7
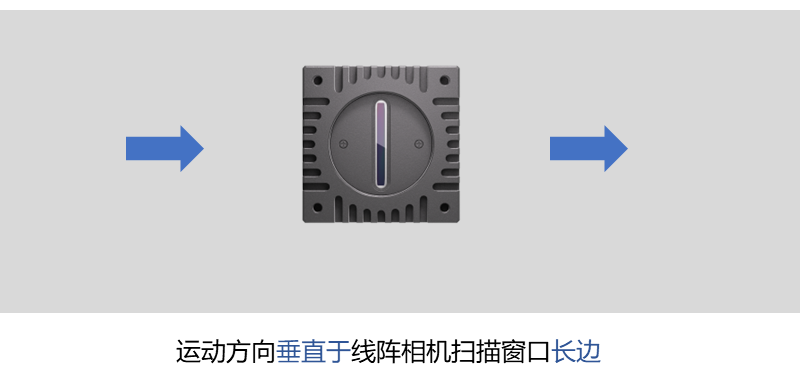
線陣相機的拍攝方向
8
線陣相機的行頻與面陣相機的幀率
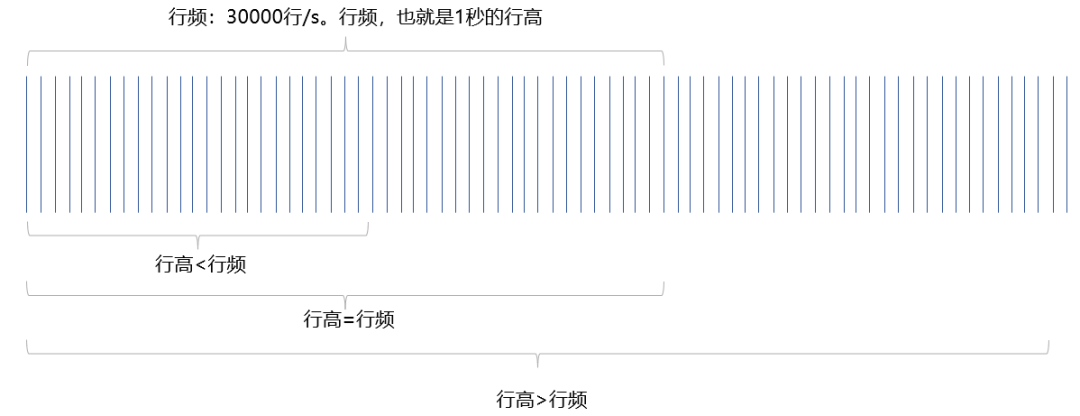
??幀率,是相機的拍照速度,通常用每秒拍的圖像張數來定義。它的單位是FPS,即Frame per Second
??行頻,其實是一種特殊的幀率:針對只有幾行像素的的CMOS,其拍照速度很快,能達到每秒幾萬張-幾十萬張,說出來很嚇人,但因為拍出來的圖,近似一條線,不能直接用,為避免誤解,就不把它叫幀率,而叫行頻。
說到頻率,大家首先會想到波,周期。
如果把上圖藍色線條(線陣相機的一次拍照,一幅線狀圖像)想象為波峰,一秒中出現的紅線次數,就是這個波的頻率。
這也是“行頻” 這個詞的由來。
9
線陣相機的行高
??理論上來說,線陣相機可以無限拍下去,通過拼接,我們能得到一幅無限長的圖像。
??無限長意味著無限大,這樣的圖像,這樣的數據量,沒有任何計算機能處理。
??所以,實際應用中,都需要根據應用需求,每拍了X行后,就截取一幅圖像。
??這個X行,就是行高,就是這幅圖像有多少像素“高”
10
線陣相機的觸發方式:行觸發與幀觸發
行觸發
??線陣相機接收到行觸發信號后,就拍一行圖像。
??行觸發適用于運動速度不那么均勻,或需要用到一些特殊成像技術的場景,例如:長短曝光HDR,分時頻閃等,這些都需要用到行觸發。
幀觸發
??線陣相機接收到幀觸發信號后,就拍一幀圖像。這里的一幀圖像,可自定義行高。幀觸發后,線陣相機一直按設定行頻拍照,直到達到指定行高。
??幀觸發,比較適用于運動比較勻速的物體拍攝。
11
理想行頻與運動速度、客戶要求精度
什么是理想行頻?
拍照速度,要與運動速度匹配,才能拍出清晰的圖像。理想行頻,就是與被拍攝物運動速度相匹配的行頻。每一個具體應用,其理想行頻,都不相同。
??客戶要求精度。一般客戶說精度要達到0.xmm,表達的意思,是拍出來的圖像,要能分辨這個長或寬為0.xmm的圖案。而要達到這個要求,一般就需要用2-5個像素,來表現、呈現這個0.xmm。這樣,圖像算法或人的大腦,看到這幅圖像時,就能比較容易的找到、識別出,檢測出這個0.xmm的圖案。
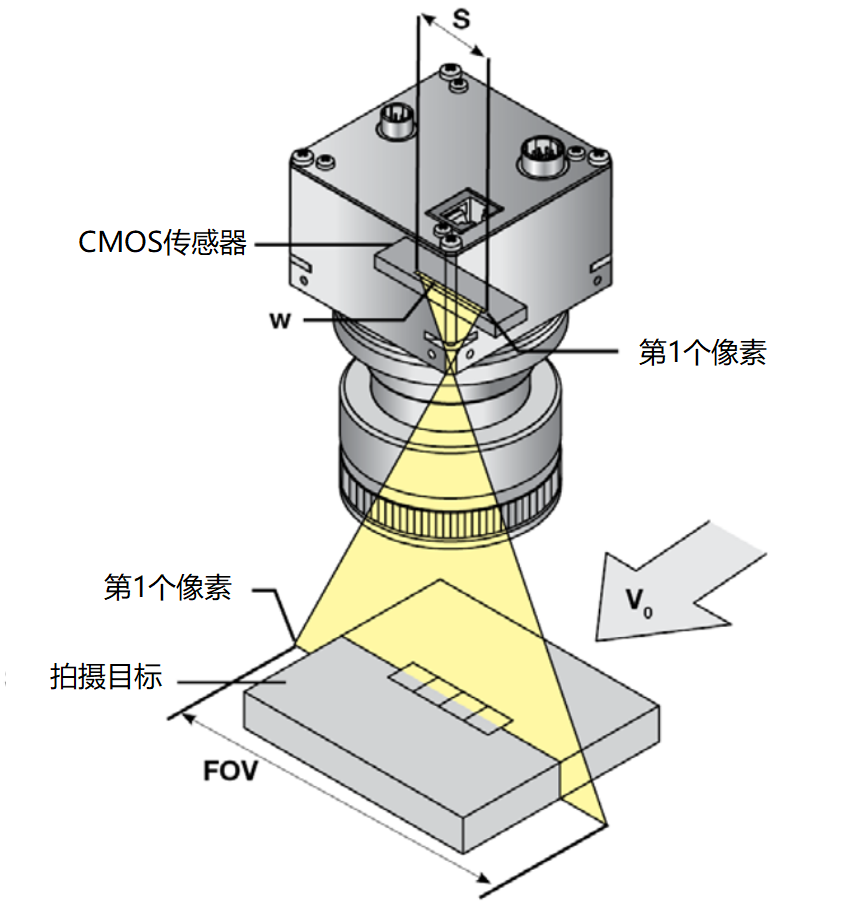
??像素精度。如下圖所示,像素精度,就是被拍攝目標的一段長度,用多少個像素在該目標上的投影,來代表和表達。一個像素,與物體距離的遠近,決定了其能表達的長度(精度):可以是0.1mm,也可以是幾米,甚至幾光年(韋伯望遠鏡)
??像素都是正方形,所以,也就決定了,X方向精度 = Y方向精度。
??理想行頻 = 運動速度/像素精度。例如,一個物體,運動速度2000mm/s,像素精度0.1mm,則理想行頻 = 2000mm/s / 0.1mm = 20000/s,即20k(這個公式的另一層意思,是2000mm,可以劃分成多少個0.1mm)。
??分辨率;如果該物體寬1000mm,像素精度0.1mm,考慮到兩側冗余,則分辨率 = 1050/0.1=10500,即,這個精度下,需要10500個像素,才能對這么寬的物體進行清晰的成像。
12
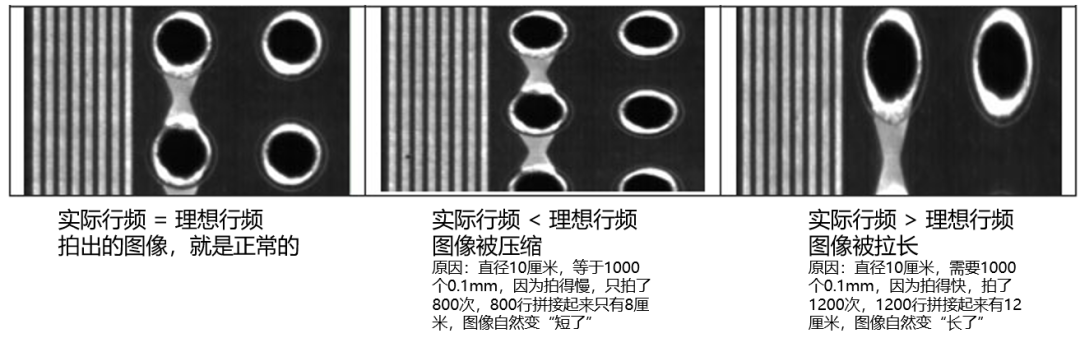
實際行頻與運動速度、理想行頻的關系
像素精度確定的前提下,運動速度越快,理想行頻越高。
13
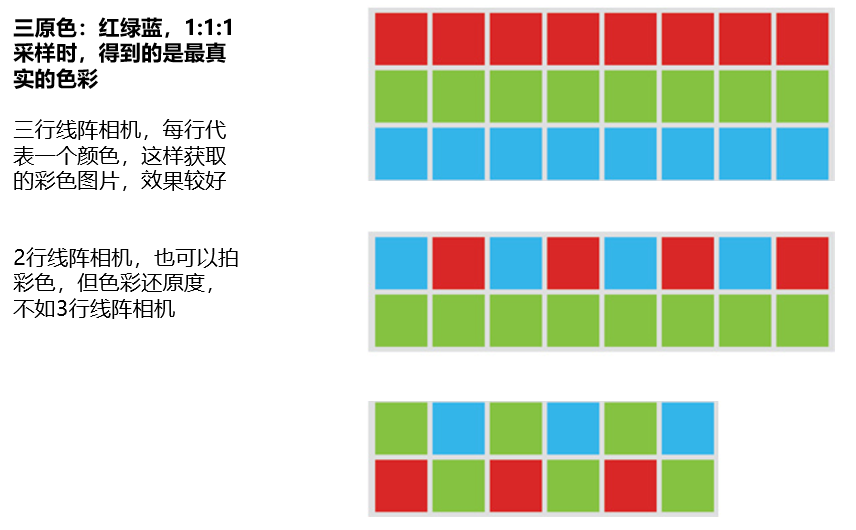
線陣相機怎么拍攝彩色圖像?
彩色圖像,包括了R,G,B三個分量,因此,線陣相機要拍彩色圖像,也需要對三個分量進行采集。
如下圖所示,是常見的線陣相機R、G、B分量采集模式:
14
黑白線陣相機有幾行?
黑白圖像,只有1維變量,即灰度值。所以,在光照足夠的情況下,1行線陣相機,即可對目標清晰成像。
那為什么還有2行,4行,8行,甚至16行的黑白線陣相機呢?
這是因為:
??一些應用,難以安裝光源,光照充足這個條件不好滿足,于是用TDI技術來實現弱光情況下的清晰成像(TDI技術本文后面會講到)。
??分時頻閃技術(本文后面會講到),需要用到多行線陣相機。
??長短曝光技術(本文后面會講到),需要用到多行線陣相機。
15
黑白線陣相機的多線技術:TDI
在比較暗的環境下拍照,清晰成像的條件,是CMOS芯片獲取足夠的光,而獲得足夠光的方法有:
方案1:增加單位時間的光照強度(光源、大鏡頭收集光)
方案2:增加CMOS感光時長(延長曝光時間)
方案3:增加CMOS的感光面積(大靶面大像元)
小故事:7月12日,webb望遠鏡的第一張正式星空照片,用12.5小時的曝光時間,獲得了比哈勃望遠鏡10天曝光時間更清晰的成像。主要原因就是webb望遠鏡收集光的能力更強 — 鏡片更大。
下列限制,使得TDI有了用武之地。
a. 由于線陣相機的拍照頻率(行頻),要與運動速度保持匹配,所以,曝光時間不能隨意增加,方案2不能用。
b. 而某些場景下,又無法增強光照(狹小空間),方案1不能用。
c. 用大靶面CMOS芯片,成本太高,或體積太大,無法在現場安裝,方案3不能用。
TDI的本質:用不同行的芯片區域,對物體同一個區域拍照,每一行被光子激發的電子,都疊加到下一行,讓下一行間接獲得了上一行的“光”,經過多次疊加后,最后一行的圖像就足夠“亮”,足夠清晰了。
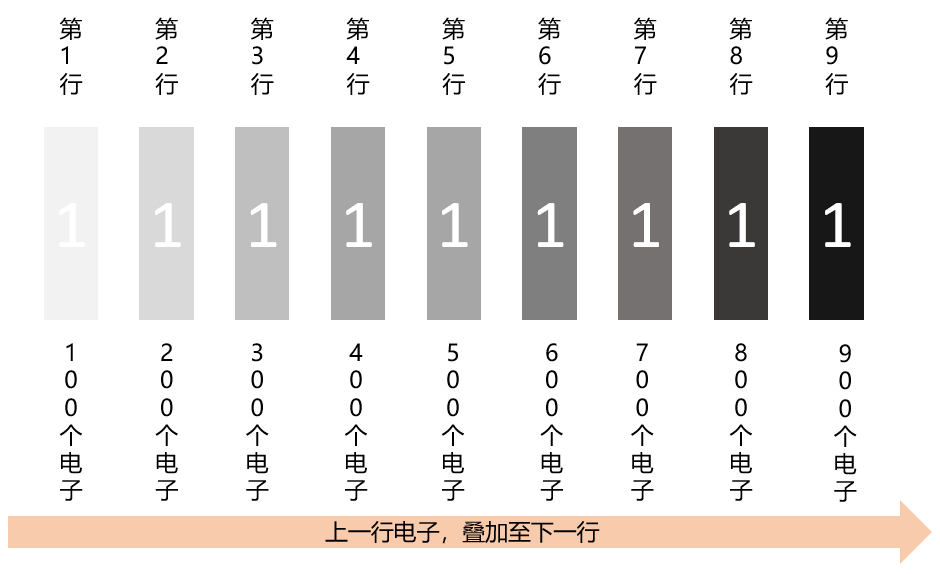
TDI成像效果:從第1行到第10行,圖像逐漸變明亮、清晰。

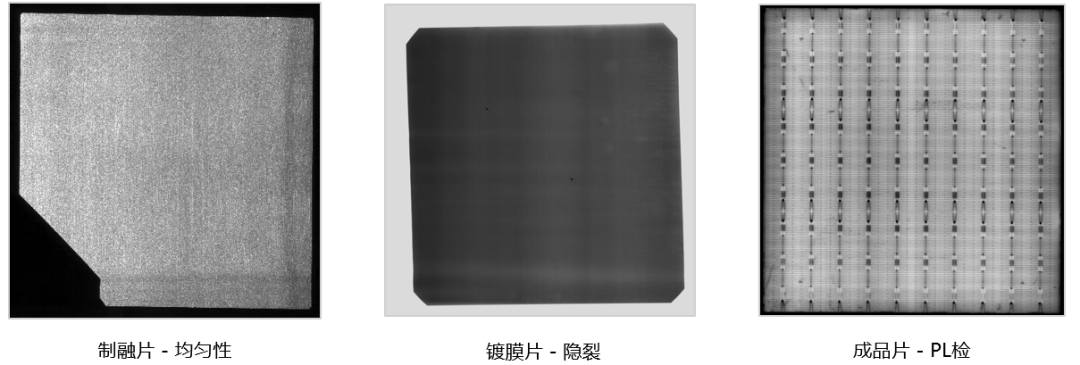
TDI成像效果:光伏行業案例
16
線陣相機的多線技術:分時頻閃
分時頻閃,是一種特殊的線陣掃描方式。
區別于傳統線陣掃描的恒定照明方式,分時頻閃控制器在線陣相機每采集一行圖像時切換光源的種類或亮度,使得多種光源成像有序地間隔排列在圖像中。(是不是與長短曝光技術很像?但HDR長短曝光,光源是恒定的;而分時頻閃,更多是為了獲取不同角度或波長的光照效果)
采集完成后對原始圖像進行拆分重組,即可在一次掃描中獲得多種光源效果圖像,從而降低成本,提高兼容性,獲得最佳成像效果。
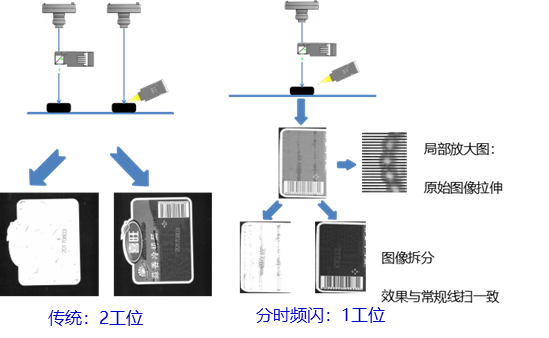
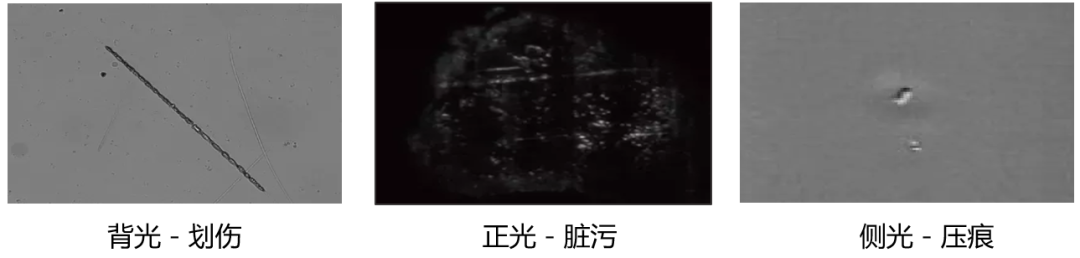
分時頻閃在光伏行業的實際應用案例
17
線陣相機的多線技術:長短曝光HDR
什么是HDR:High Dynamic Range,高動態范圍。HDR主要作用,就是讓一幅圖片里
??暗的地方(欠曝),變亮點
??亮的地方(過曝),變暗點
用大白話來形容HDR,就是:對被拍攝物不同區域的光照明暗,有更強的適應性,讓各個區域都能清晰地成像。
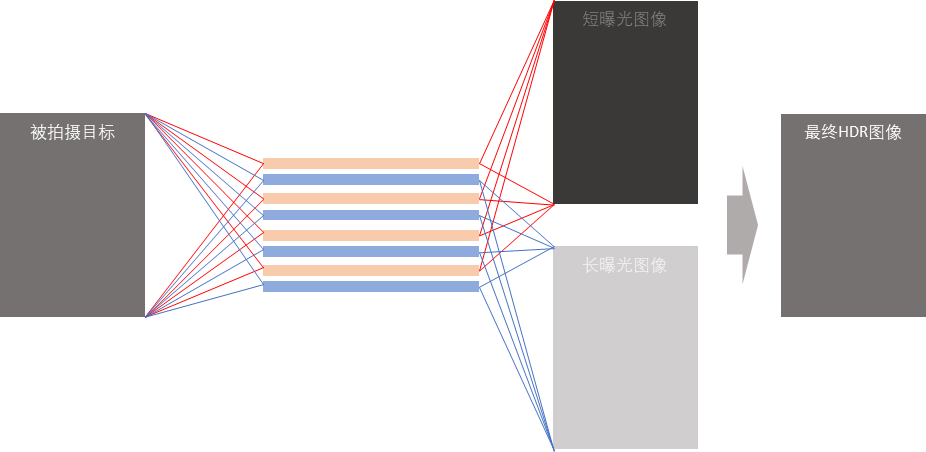
HDR的實現方式有很多種,對于線陣相機,有一種實現技術,叫長短曝光
??奇數行:短曝光
??偶數行:長曝光
??最終獲得2幅圖像,用算法,將2幅圖像合并為一幅,就得到一個HDR圖像。
是奇數行短曝光還是偶數行短曝光,這個無所謂。重點是隔行長、短曝光就行。
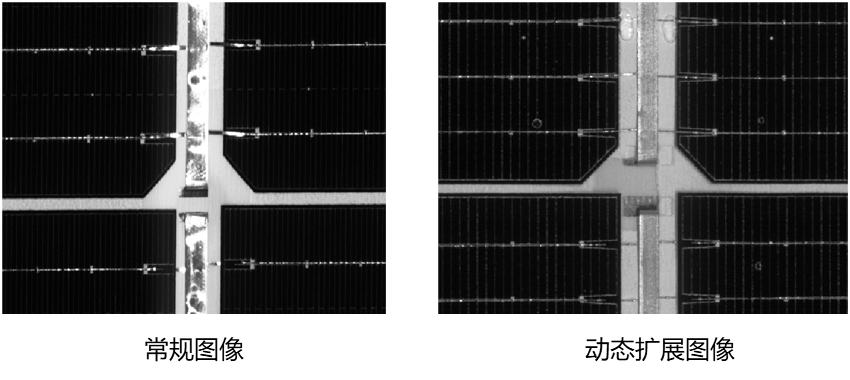
長短曝光HDR在光伏行業的應用案例:
18
線陣相機如何選型
線陣相機選型的基本步驟如下:
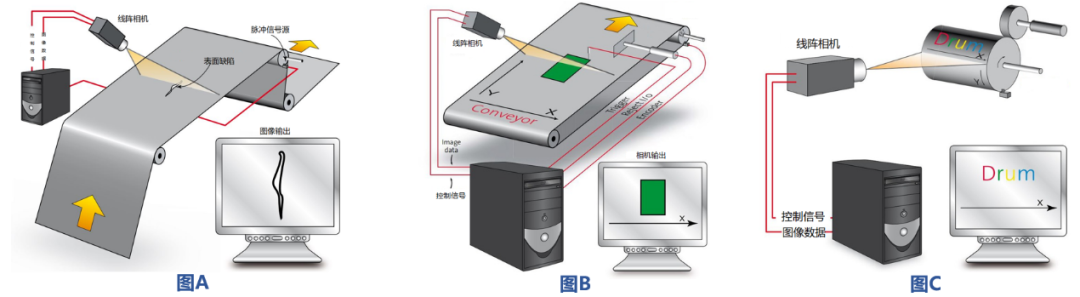
1.計算分辨率:幅寬/最小檢測精度=每行需要的像素(圖A:幅寬>>被拍攝物;圖B:幅寬>被拍攝物;圖C:幅寬≈被拍攝物 )
2.確定像素精度:幅寬/像素數=像素精度
3.確定行頻:每秒運動速度/像素精度=理想行頻
4.根據分辨率與行頻,選定相機
計算實例:
* 如幅寬為1800毫米、客戶要求精度1毫米、運動速度25000mm/s
* 相機:1800/1=1800像素,最少2000像素,選定為2k相機。如想提高清晰度,則可用2-5個像素表達1mm,則在現有像素值上乘以2-5倍。
* 像素精度:1800/2048=0.9
* 理想行頻:25000mm/0.9mm=27.8KHz
* 選擇實際行頻大于27.8KHz的2K相機即可
編輯:黃飛
?










 工商網監
工商網監
評論