ORB特征是一種圖像識(shí)別、追蹤和匹配中常用的特征,大名鼎鼎的ORB-SLAM就是使用的這一特征。它提取FAST特征點(diǎn),并通過特征點(diǎn)附近的窗口矩計(jì)算特征點(diǎn)的方向,含方向的FAST特征也被稱為oFAST
2020-09-26 11:43:23 4761
4761 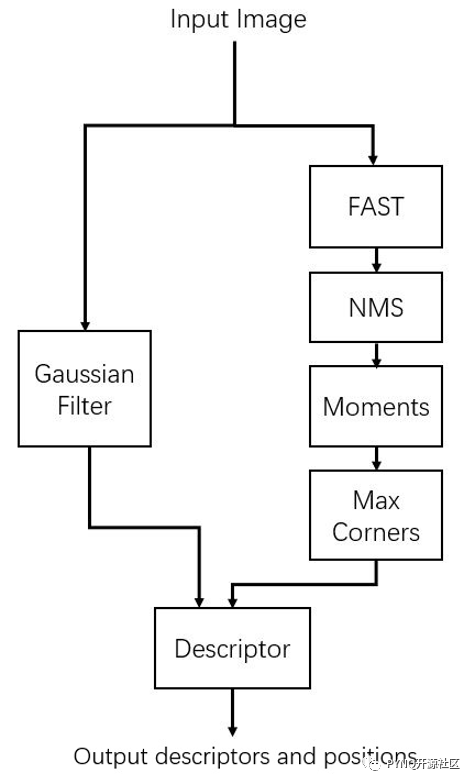
機(jī)器學(xué)習(xí)技術(shù)已被廣泛接受,并且很適合此類分類問題。基于卷積神經(jīng)網(wǎng)絡(luò)的雙重特征提取方法。提出的模型使用Radon拉冬變換進(jìn)行第一次特征提取,然后將此特征輸入卷積層進(jìn)行第二次特征提取。
2023-10-16 11:30:38382 
(3D),以此讓系統(tǒng)來探測(cè)并識(shí)別目標(biāo)。同樣的場(chǎng)景下,其效率是只配備激光雷達(dá)產(chǎn)品的 10-20 倍。除此之外,iDAR 還能將 2D 圖像覆蓋在 3D 點(diǎn)云之上,這樣我們就有了真正的彩色激光雷達(dá)。有了 AI
2018-07-26 20:45:02
目標(biāo)表面的橫截面輪廓,從而生成高密度3D點(diǎn)云。整個(gè)零件的3D點(diǎn)云用于執(zhí)行尺寸和體積測(cè)量以及決策。智能線輪廓傳感器提供內(nèi)置的測(cè)量工具,還可以生成與3D數(shù)據(jù)同步的高度詳細(xì)的2D表面圖像。然后可以使用常見
2020-12-09 14:09:45
學(xué)會(huì)了如何借助創(chuàng)新設(shè)計(jì)神器—浩辰3D制圖軟件,快速進(jìn)行定制化設(shè)計(jì)。作為主流的3D設(shè)計(jì)軟件,浩辰3D制圖軟件能輕松應(yīng)對(duì)零件設(shè)計(jì)、裝配、工程圖、仿真、動(dòng)畫、逆向工程等復(fù)雜設(shè)計(jì)環(huán)境,滿足多場(chǎng)景、多樣化等設(shè)計(jì)需求。
2021-02-26 17:17:57
能映射到三維草圖上,通過方向盤來移動(dòng)草圖;5、特征操作通過對(duì)草圖進(jìn)行特征操作,即可完成三維實(shí)體設(shè)計(jì)。直接編輯主流3D模型數(shù)據(jù)借助浩辰3D,設(shè)計(jì)師不僅可以使用「方向盤」來直接編輯、修改主流3D模型數(shù)據(jù)
2021-02-24 17:22:41
采集為一個(gè)由X,Y和Z坐標(biāo)(表示物體外部表面)組成的點(diǎn)云。對(duì)于一個(gè)3D掃描的分析可以確定被掃描物體的表面積、體積、表面形狀、外形和特征尺寸。 一個(gè)3D掃描儀需要一個(gè)探針來確定到物體表面上每一個(gè)點(diǎn)的距離
2018-08-30 14:51:20
3D軟件中基于草圖的特征設(shè)計(jì)步驟: 借用浩辰3D軟件快速建模下草圖編輯特征,可以直接對(duì)外部模型直接編輯和應(yīng)用,減少重復(fù)工作。關(guān)于浩辰3D軟件中基于草圖的特征設(shè)計(jì)技巧就給大家介紹到這里了,更多相關(guān)浩辰3D軟件使用技巧可以關(guān)注浩辰CAD軟件官網(wǎng)資訊專欄。
2021-03-03 16:34:21
輪廓的方向;(3)其他情況若是放置于圓弧或曲線時(shí),同樣可以通過繪制樣條曲線+旋轉(zhuǎn)的方式,對(duì)文本輪廓進(jìn)行重新定位。3、文本特征生成創(chuàng)建文本輪廓后,可使用「拉伸」命令生成 3D文本特征,如圖所示。4、曲面文本特征
2021-04-22 17:28:02
研究生期間進(jìn)行了基于2D激光雷達(dá)的SLAM的研究,當(dāng)時(shí)主要做了二維激光雷達(dá)的數(shù)據(jù)處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機(jī)會(huì),決定正式邁出第一步,徹底進(jìn)入SLAM的坑!心中
2021-08-30 06:13:31
機(jī)器人定位導(dǎo)航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術(shù)和產(chǎn)品落地上都較為成熟,因而成為現(xiàn)下最為主流的定位導(dǎo)航方式,在家用掃地機(jī)器人及商用送餐機(jī)器人等服務(wù)機(jī)器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
是激光雷達(dá)+SLAM的定位導(dǎo)航技術(shù)。 SLAM表示在不具備周圍環(huán)境信息的前提下,讓移動(dòng)機(jī)器人在運(yùn)動(dòng)過程中根據(jù)自身攜帶的傳感器和對(duì)周圍環(huán)境的感知進(jìn)行自身定位,同時(shí)增量式構(gòu)建周圍環(huán)境地圖。SLAM可以提高
2018-11-09 15:59:01
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統(tǒng)框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
`提供生物特征識(shí)別認(rèn)證能力,即基于人體固有的生理特征和行為特征來識(shí)別用戶身份,供第三方應(yīng)用調(diào)用,可應(yīng)用于設(shè)備解鎖、支付、應(yīng)用登錄等身份認(rèn)證場(chǎng)景。當(dāng)前生物特征識(shí)別能力提供2D人臉識(shí)別、3D人臉識(shí)別
2020-09-23 14:34:09
MATLAB中對(duì)音頻信號(hào)進(jìn)行小波分解和短時(shí)傅里葉分析后怎么對(duì)信號(hào)頻譜圖中能量密度特征用數(shù)學(xué)形態(tài)學(xué)的方法進(jìn)行形態(tài)特征提取?
2020-10-12 18:21:04
計(jì)時(shí)。對(duì)于作者定制的3D到2D投影算法,又設(shè)計(jì)了一個(gè)覆蓋層來加速乘法累加(MAC)操作,然后通過Jupyter筆記本在PYNQ板上進(jìn)行測(cè)試。未來將為視頻輸入設(shè)計(jì)自定義覆蓋,以加速視差圖和三維點(diǎn)云生成
2021-01-07 17:25:42
申請(qǐng)理由:項(xiàng)目描述:板卡將安裝Ubuntu系統(tǒng),進(jìn)行上位機(jī)開發(fā),將使用Opencv視覺庫(kù),pcl點(diǎn)云庫(kù),使用QT開發(fā),通過一字線激光完成對(duì)指定物件掃描得到最終的3D模型。激光成像單元采用了一字線激光
2016-08-03 18:24:11
` 本帖最后由 Micheal-L 于 2016-10-20 20:55 編輯
系統(tǒng)方案本項(xiàng)目基于激光成像的方式,結(jié)合DB410進(jìn)行上位機(jī)開發(fā),完成對(duì)指定物件掃描得到最終的偽3D模型。激光成像
2016-10-20 20:52:03
方便。項(xiàng)目描述:3D激光掃描測(cè)距儀與市面上的原理一樣,采用一個(gè)60fps攝像頭加低通紅外光濾光片,和一個(gè)一字激光器,搭載在無刷電機(jī)上,是個(gè)整個(gè)平臺(tái)能夠繞著電機(jī)軸轉(zhuǎn)動(dòng)。對(duì)周圍環(huán)境進(jìn)行掃描,建模。
2016-01-18 16:22:24
主要內(nèi)容本文提出了一種不依賴于棋盤格等輔助標(biāo)定物體,實(shí)現(xiàn)像素級(jí)相機(jī)和激光雷達(dá)自動(dòng)標(biāo)定的方法。方法直接從點(diǎn)云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續(xù)邊。文中首先指出:以下四種
2021-09-01 07:42:19
控制、醫(yī)療、牙科和原型設(shè)計(jì)。 3D掃描是提取一個(gè)物體的表面和物理測(cè)量,并用數(shù)字的方式將其表示出來。這些數(shù)據(jù)被采集為一個(gè)由X,Y和Z坐標(biāo)(表示物體外部表面)組成的點(diǎn)云。對(duì)于一個(gè)3D掃描的分析可以確定被掃描
2022-11-16 07:48:07
測(cè)量金屬制品的長(zhǎng)度、寬度、高度等維度參數(shù)。
除了測(cè)量金屬表面的形狀和輪廓外,光學(xué)3D表面輪廓儀還可以生成三維點(diǎn)云數(shù)據(jù)和色彩圖像,用于進(jìn)一步分析和展示:
1、三維點(diǎn)云數(shù)據(jù)可以用于進(jìn)行CAD模型比對(duì)、工藝
2023-08-21 13:41:46
本帖最后由 一只耳朵怪 于 2018-5-25 16:17 編輯
現(xiàn)在準(zhǔn)備入手一個(gè)項(xiàng)目,用手工方式畫出目標(biāo)的區(qū)域,進(jìn)行實(shí)時(shí)的特征提取和數(shù)據(jù)分析,視頻是一路720*576的黑白D1,25幀,請(qǐng)問DM642能滿足性能嗎?若不能,有什么好的推薦?謝謝!
2018-05-25 00:43:34
基于matlab的人臉檢測(cè)K-L的人臉識(shí)別(膚色分割和特征提取)[hide] [/hide]《labview人臉識(shí)別》課程鏈接:http://url.elecfans.com/u/bc0e010da8
2012-02-22 16:45:03
音頻特征提取在音頻信號(hào)分析和處理中起著非常重要的作用。考慮到音頻信號(hào)的非平穩(wěn)性,對(duì)音頻信號(hào)進(jìn)行小波包分解,為了獲取健壯的特征,采用改進(jìn)的局域判別基(LDB)技術(shù)對(duì)小波包樹進(jìn)行裁剪,提取局域差別基各子
2011-03-04 20:46:21
的兩維處理方法,并用于三種數(shù)字信號(hào)的特征分析。最后詳細(xì)介紹了基于聯(lián)合頻率分析的特征提取及識(shí)別過程,給出了仿真測(cè)試結(jié)果。
2021-04-21 06:17:47
計(jì)算機(jī)視覺的特征提取算法研究至關(guān)重要。在一些算法中,一個(gè)高復(fù)雜度特征的提取可能能夠解決問題(進(jìn)行目標(biāo)檢測(cè)等目的),但這將以處理更多數(shù)據(jù),需要更高的處理效果為代價(jià)。而顏色特征無需進(jìn)行大量計(jì)算。只需將數(shù)字圖像中的像素值進(jìn)行相應(yīng)轉(zhuǎn)換,表現(xiàn)為數(shù)值即可。因此顏色特征以其低復(fù)雜度成為了一個(gè)較好的特征。
2019-10-12 06:55:23
如何同時(shí)獲取2d圖像序列和相應(yīng)的3d點(diǎn)云?以上來自于谷歌翻譯以下為原文How to obtain the sequence of 2d image and corresponding 3d point cloud at the same time?
2018-11-13 11:25:01
`如何將脈沖耦合神經(jīng)網(wǎng)絡(luò),體視學(xué),F(xiàn)ourier變換,小數(shù)冪指數(shù)濾波器結(jié)合實(shí)現(xiàn)藥材顯微圖像的特征提取?`
2015-04-16 12:25:45
圖像處理,手指靜脈圖像的特征提取和識(shí)別前期研究
2012-05-11 11:51:27
"特點(diǎn)的基礎(chǔ)上,先將手背靜脈圖像"分塊",再對(duì)分塊后的圖像進(jìn)行FRAT變換,并提出一種向量非均衡分布可得最大值的方法,提取手背靜脈圖像紋理特征,最后通過特征匹配進(jìn)行分類識(shí)別
2010-04-24 09:58:17
有大神嗎?可以分享一個(gè)LabVIEW指紋特征提取的資料嗎?感激不盡。
2017-04-19 07:31:13
中用到了小波變換、小波包變換以及多小波變換等來對(duì)電路故障信息進(jìn)行特征提取,對(duì)模擬電路瞬態(tài)信號(hào)的提取、消除電路噪聲和模擬電路特有的元件參數(shù)容差具有良好的效果。圖2 緊致型小波神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖 小波分析技術(shù)
2016-12-09 18:15:39
3D模型設(shè)計(jì)中創(chuàng)建槽特征是十分常見的,那么在浩辰3D軟件中如何創(chuàng)建槽特征呢?下面小編就來給大家介紹一下浩辰3D軟件中創(chuàng)建槽特征的操作技巧吧!浩辰3D軟件中創(chuàng)建槽特征的操作步驟如下:首先打開浩辰3D
2020-09-28 16:16:56
自制低成本3D激光掃描測(cè)距儀(3D激光雷達(dá))
2021-03-04 10:51:54
3D 點(diǎn)云。高度差異化 3D 機(jī)器視覺系統(tǒng)利用 DLP? LightCrafter? 4500 估模塊 (EVM)(采用 DLP? 0.45 英寸 WXGA 芯片組),能夠靈活控制工業(yè)、醫(yī)療和安全
2022-09-22 10:20:04
計(jì)算信息特征(屬性)的權(quán)重問題在信息分類及模式匹配中是一個(gè)研究熱點(diǎn)。該文提出一種基于改進(jìn)ReliefF算法的主成分特征提取方法,利用此算法刪除原始特征中與分類不相關(guān)的特征
2009-04-15 10:06:26 7
7 在現(xiàn)有基于已知特征項(xiàng)特征提取算法的基礎(chǔ)上,提出一種基于已知特征項(xiàng)和環(huán)境相關(guān)量的特征提取算法。該算法通過已知特征項(xiàng)搜索頻繁項(xiàng)集,提高了特征提取速度。環(huán)境相關(guān)量的
2009-04-18 09:37:0117 提出一種基于分塊離散余弦變換(DCT)與奇異值分解閾值壓縮(TCSVD)的人臉特征提取與識(shí)別算法。該算法對(duì)人臉圖像進(jìn)行分塊DCT變換,根據(jù)圖像塊位置和能量分布選擇不同的DCT高低頻分
2009-04-23 09:57:5424 提出了一種新的人臉特征提取方法,該方法采用DCT對(duì)人臉圖像進(jìn)行降維和去噪,并通過KDA提取人臉特征。基于該特征,采用NN分類器,對(duì)ORL人臉庫(kù)進(jìn)行分類識(shí)別,僅用28個(gè)特征平均
2009-05-25 22:04:1015 詳細(xì)介紹了基于KPCA入侵檢測(cè)系統(tǒng)特征提取的工作原理,并在MATLAB環(huán)境下利用KDDCUP99數(shù)據(jù)集進(jìn)行了基于KPCA特征提取的仿真實(shí)驗(yàn),結(jié)果表明KPCA能對(duì)樣本能進(jìn)行很好的降維,并可保持
2009-09-23 11:36:4816 SISAR功率譜特征提取方法:文主要研究了對(duì)SISAR全息信號(hào)功率譜歸一化處理獲得識(shí)別特征的方法。通過分析側(cè)影成像全息信號(hào)和目標(biāo)側(cè)影雷達(dá)截面積的關(guān)系,導(dǎo)出由計(jì)算雷達(dá)截面積的方
2009-10-23 10:26:2112 基于廣義典型相關(guān)分析的仿射不變特征提取方法:該文結(jié)合廣義典型相關(guān)分析(GCCA)理論,提出了一種新的圖像仿射不變特征提取方法。首先,基于多尺度自卷積變換(MSA)構(gòu)造了一組新
2009-10-29 12:52:5317 特征提取是模式識(shí)別中的關(guān)鍵技術(shù)之一,本文提出了一種基于改進(jìn)ReliefF 算法的主成分特征提取方法,通過該方法進(jìn)行主特征特征提取可以有效降維,大大減輕了后續(xù)的分類器的
2009-12-12 13:47:4527 本文介紹了如何應(yīng)用提升小波包變換對(duì)信號(hào)進(jìn)行特征提取,并在此基礎(chǔ)上提出了四條定量的評(píng)價(jià)標(biāo)準(zhǔn),能夠全面地對(duì)此類特征提取方法的有效性進(jìn)行評(píng)價(jià)。通過這四個(gè)標(biāo)準(zhǔn),就能更科
2010-02-22 15:34:3317 非線性PCA在表面肌電信號(hào)特征提取中的應(yīng)用
針對(duì)表面肌電信號(hào)的特點(diǎn),提出了一種應(yīng)用非線性主分量分析( PCA) 提取表面肌電信號(hào)特征的新方法. 該方法在表面肌
2010-02-26 17:08:2617 中圖儀器Novator系列影像儀激光掃描3d成像采用大理石主體機(jī)臺(tái)和精密伺服控制系統(tǒng),將傳統(tǒng)影像測(cè)量與激光測(cè)量掃描技術(shù)相結(jié)合:可支持搭載高精度線掃激光測(cè)頭,無接觸掃描3D輪廓成像,抑制多重反射,能夠
2023-12-27 09:22:57
特征提取是聲目標(biāo)識(shí)別的關(guān)鍵。由于車輛噪聲信號(hào)的非平穩(wěn)特性,傳統(tǒng)特征提取方法有很大局限性。介紹小波分析方法在車輛噪聲信號(hào)特征提取中的應(yīng)用,仿真結(jié)果證
2010-12-31 17:16:280 摘要:針對(duì)常規(guī)特征提取方法存在著問題不足,提出了基于BP神經(jīng)網(wǎng)絡(luò)和基于互信息熵的特征提取方法,并通過特征提取實(shí)例加以說明。結(jié)果表明這兩種方法是可行和有效的。
2006-03-11 13:14:211277 
小波變換在過零調(diào)制信號(hào)特征提取中的應(yīng)用
介紹小波變換理論和算法,說明去除信號(hào)噪聲原理;給出了以db2為小波函數(shù)和選用閾值方法去噪的
2009-10-12 23:47:451446 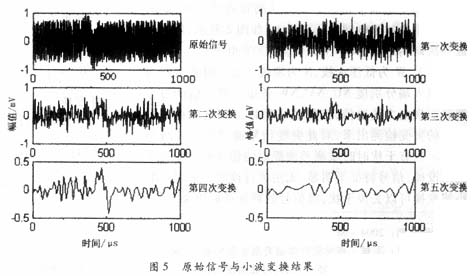
特征提取是目標(biāo)識(shí)別的關(guān)鍵,如何從有限的測(cè)量數(shù)據(jù)中獲取有效、可靠的特征參數(shù),是特征提取中重點(diǎn)考慮的問題。本文采用EMD方法對(duì)語音信號(hào)進(jìn)行頻率特征提取,可以較好地降低語音
2011-10-10 15:11:4241 文中主要介紹了基于分形維數(shù)提取法、小波提取法、Gabor濾波器提取法、灰度共生矩陣提取法等紋理特征提取的原理和步驟等,并對(duì)各個(gè)方法的優(yōu)、缺點(diǎn)進(jìn)行了歸納總結(jié)。
2012-02-22 11:11:2610 針對(duì)人臉識(shí)別中的特征提取問題,提出一種新的基于Gabor的特征提取算法,利用Gabor小波變換良好的提取區(qū)分能力和LDA所具有的判別性優(yōu)勢(shì)來進(jìn)行特征提取。首先利用Gabor小波變換來提取人臉特征
2013-01-22 14:25:2654 脈沖多普勒雷達(dá)特征提取技術(shù)分析,下來看看,
2016-12-24 23:19:109 基于小波包_包絡(luò)樣本熵的故障特征提取方法及其應(yīng)用_李其龍
2016-12-30 14:37:070 基于多尺度融合的甲狀腺結(jié)節(jié)圖像特征提取_王昊
2017-01-08 11:13:290 基于CMF_EEMD的風(fēng)電齒輪箱多故障特征提取_王志堅(jiān)
2017-01-08 13:26:490 基于粒計(jì)算的空間特征提取及其檢索的研究_宋俊雅
2017-03-16 08:00:000 基于線性預(yù)測(cè)原理的艙音特征提取與重構(gòu)_程道來
2017-03-15 08:00:000 紅外火焰探測(cè)信號(hào)的特征提取研究_周永杰
2017-03-19 11:41:392 時(shí)頻分析的工頻通信信號(hào)特征提取
2017-08-31 10:00:2811 計(jì)算機(jī)視覺的特征提取算法研究至關(guān)重要。在一些算法中,一個(gè)高復(fù)雜度特征的提取可能能夠解決問題(進(jìn)行目標(biāo)檢測(cè)等目的),但這將以處理更多數(shù)據(jù),需要更高的處理效果為代價(jià)。而顏色特征無需進(jìn)行大量計(jì)算。只需將數(shù)字圖像中的像素值進(jìn)行相應(yīng)轉(zhuǎn)換,表現(xiàn)為數(shù)值即可。因此顏色特征以其低復(fù)雜度成為了一個(gè)較好的特征。
2017-11-16 14:12:124191 在三維立體視覺中,工件表面的特征提取是三維重構(gòu)的前提和關(guān)鍵。但是,工件表面的自然特征往往表現(xiàn)得不夠明顯,使得特征的提取非常困難。因此,經(jīng)常使用激光網(wǎng)格投影到待檢測(cè)的工件表面,使工件表面具備確定
2017-11-17 17:26:003 人臉檢測(cè)是一個(gè)非常復(fù)雜的模式,人臉面部特征提取及識(shí)別成為當(dāng)前計(jì)算機(jī)圖像處理相關(guān)學(xué)科的一個(gè)極具挑戰(zhàn)的課題。而基于Carvelet變換的人臉特征提取及識(shí)別的意義在于Curvelet繼承了小波分析優(yōu)良
2017-11-30 15:09:363492 
的SIFT特征提取算法。首先提取出SIFT特征點(diǎn),然后根據(jù)特征點(diǎn)周邊梯度情況,判斷特征點(diǎn)是否落于目標(biāo)區(qū)域,進(jìn)而保留目標(biāo)區(qū)域特征點(diǎn),刪除背景區(qū)域特征點(diǎn),減少特征點(diǎn)數(shù)量的同時(shí)也實(shí)現(xiàn)了去冗余。提取所得的特征點(diǎn)質(zhì)量好壞由落入目標(biāo)區(qū)域的點(diǎn)數(shù)和
2017-12-01 15:08:380 針對(duì)復(fù)雜環(huán)境下的深度圖像手勢(shì)特征提取信息冗余量大、編碼不穩(wěn)定等問題,提出了一種改進(jìn)的基于曲率局部二值模式( LBP)的深度圖像手勢(shì)特征提取算法。該算法首先通過坐標(biāo)轉(zhuǎn)換將分割出的手勢(shì)深度數(shù)據(jù)轉(zhuǎn)換
2017-12-11 16:21:064 針對(duì)說話人識(shí)別系統(tǒng)中存在的有效語音特征提取以及噪聲影V向的問題,提出了一種新的語音特征提取方法基于S變換的美爾倒譜系數(shù)( SMFCC)。該方法是在傳統(tǒng)美爾倒譜系數(shù)(MFCC)的基礎(chǔ)上利用S變換的二維
2017-12-18 11:29:041 針對(duì)立體視覺深度圖特征提取精確度低、復(fù)雜度高的問題,提出了一種基于主成分分析方向深度梯度直方圖( PCA-HODG)的特征提取算法。首先,對(duì)雙目立體視覺圖像進(jìn)行視差計(jì)算和深度圖提取,獲取高質(zhì)量深度圖
2017-12-26 14:32:070 針對(duì)現(xiàn)有行為特征提取方法識(shí)別率低的問題,提出了一種融合稠密光流軌跡和稀疏編碼框架的無監(jiān)督行為特征提取方法( DOF-SC)。首先,在稠密光流(DOF)軌跡提取的基礎(chǔ)上,對(duì)以軌跡為中心的原始圖像塊進(jìn)行
2017-12-26 18:48:520 針對(duì)基于紋理信息的行人特征提取算法中存在特征信息冗余度大,無法刻畫人眼視覺敏感性的不足,提出一種融合人類視覺感知特性的基于顯著性局部二值模式( SF-LBP)的行人紋理特征提取算法。該算法首先
2017-12-29 15:06:580 捕獲問題,并對(duì)其特征參數(shù)提取算法進(jìn)行了研究。針對(duì)跳頻信號(hào)的特征提取,研究了一種基于小波脊線的特征提取算法,通過matlab仿真實(shí)驗(yàn)對(duì)方法的性能進(jìn)行了驗(yàn)證,實(shí)驗(yàn)表明基于小波脊線的特征提取算法有很大的性能優(yōu)勢(shì),進(jìn)一步提
2018-01-04 14:04:490 針對(duì)人體動(dòng)作識(shí)別中時(shí)空特征提取問題,提出一種基于層次時(shí)間記憶( HTM)架構(gòu)的深度學(xué)習(xí)模型,用來提取圖像幀的時(shí)空特征。將圖像幀構(gòu)建成樹型節(jié)點(diǎn)層次結(jié)構(gòu),在每一層中,通過歐氏距離分組來提取圖像樣本的空間
2018-01-17 17:27:250 針對(duì)液壓泵故障特征提取問題,提出了一種基于奇異值分解和小波包變換的液壓泵振動(dòng)信號(hào)特征提取方法。通過奇異值分解將噪聲非均勻分布的液壓泵振動(dòng)信號(hào)正交分解為噪聲分布相對(duì)均勻的分量,對(duì)各分量進(jìn)行小波包閾值
2018-03-05 14:07:530 針對(duì)電影評(píng)分中特征提取效率較低的問題,提出了與QR分解相結(jié)合的Nystrom方法。首先,利用自適應(yīng)方法進(jìn)行采樣,然后對(duì)內(nèi)部矩陣進(jìn)行QR分解,將分解后的矩陣與內(nèi)部矩陣進(jìn)行重新組合并進(jìn)行特征分解
2019-01-04 09:36:191 本文檔的主要內(nèi)容詳細(xì)介紹的是圖像邊緣檢測(cè)和特征提取實(shí)驗(yàn)報(bào)告的詳細(xì)資料說明目的包括了:1.了解圖像邊緣檢測(cè)的原理。自己實(shí)現(xiàn)邊緣檢測(cè)算法,對(duì)特定的幾幅圖像進(jìn)行邊緣檢測(cè),并達(dá)到較好的效果。2.了解特征提取的原理,并對(duì)圖像中存在的一些特征進(jìn)行特征提取。
2019-04-19 08:00:002 本文檔的主要內(nèi)容詳細(xì)介紹的是基于Labview的語音模式識(shí)別MFCC原理特征提取。
2020-01-09 08:00:0038 本文主要闡述了語音識(shí)別算法及語音識(shí)別特征提取方法。
2020-04-01 09:24:4929661 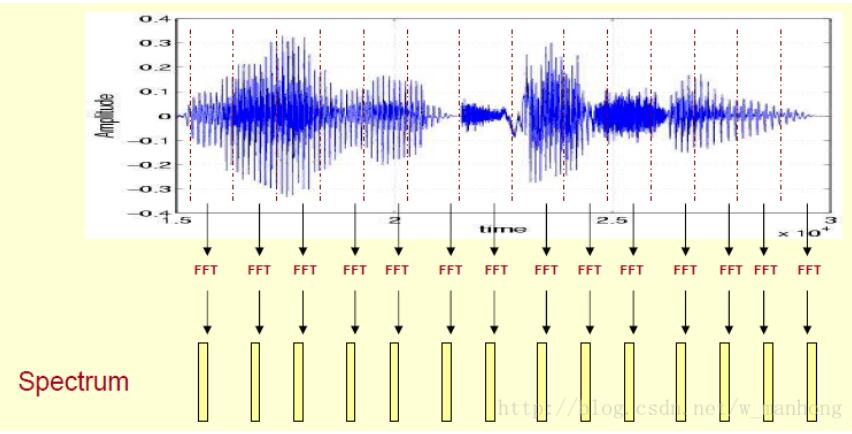
機(jī)器學(xué)習(xí)中特征選擇和特征提取區(qū)別 demi 在 周四, 06/11/2020 - 16:08 提交 1. 特征提取 V.S 特征選擇 特征提取和特征選擇
2020-09-14 16:23:203734 
導(dǎo)讀鑒于顯著性目標(biāo)和偽裝目標(biāo)研究的相似性,本文作者將顯著性目標(biāo)與偽裝目標(biāo)合在一起進(jìn)行研究,文章重點(diǎn)是特征提取網(wǎng)絡(luò)與特征融合技術(shù),主要介紹了三種方法EGNet,PFANet和SINet。
2021-03-12 10:13:579586 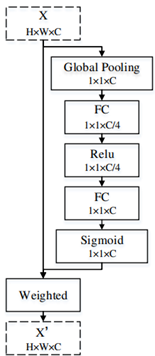
近年來未知的計(jì)算機(jī)漏洞欻量呈海量増長(zhǎng)狀態(tài),對(duì)于大量的漏洞數(shù)據(jù)進(jìn)行及時(shí)準(zhǔn)確的分析和分類管理,是十分重要且有待解決的問題。因此,提出一種基于信息熵與綜合函數(shù)(S-C)特征提取,并利用關(guān)聯(lián)了特征
2021-04-13 13:51:153 利用監(jiān)督性學(xué)習(xí)算法進(jìn)行語音増強(qiáng)時(shí),特征提取是至關(guān)重要的步驟。現(xiàn)有的組合特征和多分辨率特征等聽覺特征是常用的聲學(xué)特征,基于這些特征的増強(qiáng)語音雖然可懂度得到了較大提升,但是仍然殘留大量噪聲,語音
2021-05-19 16:33:1026 基于單標(biāo)記分類的降維及特征選擇方法難以直接運(yùn)用到多標(biāo)記學(xué)習(xí)中,而將多標(biāo)記學(xué)習(xí)問題獨(dú)立分解為多個(gè)單標(biāo)記學(xué)習(xí)問題再進(jìn)行降維會(huì)丟失標(biāo)記的相關(guān)性信息。為此,提出一種基于嵌入式特征提取的多標(biāo)記分類算法
2021-05-24 15:31:144 基于嵌入式特征提取的多標(biāo)記分類算法說明。
2021-06-04 10:18:407 速度。為解決上述問題,文中提出一種基于擴(kuò)展Har特征提取和 DBSCAN密度聚類的鋼軌識(shí)別算法。首先通過仿射變換、池化、灰度均衡仳、邊緣檢測(cè)等算法對(duì)圖像進(jìn)行預(yù)處理,然后基于擴(kuò)展Haar特征提取圖像中鋼軌的特征點(diǎn),最后利用 DBSCAN算法對(duì)特
2021-06-16 15:03:495 基于中軸變換的改進(jìn)骨架特征提取方法
2021-06-27 15:38:1925 無人平臺(tái)在大范圍環(huán)境中 實(shí)現(xiàn)自 主定位與導(dǎo)航的能力 需求日 益嚴(yán)苛, 其中 基于激光雷達(dá)的同步定位和繪圖 技術(shù)(SLAM) 是主流的研究方案。 在這項(xiàng)工作中, 本文系統(tǒng)概述了 3D 激光雷達(dá)SLAM
2022-03-21 16:07:574576 特征提取是計(jì)算機(jī)視覺中的一個(gè)重要主題。不論是SLAM、SFM、三維重建等重要應(yīng)用的底層都是建立在特征點(diǎn)跨圖像可靠地提取和匹配之上。特征提取是計(jì)算機(jī)視覺領(lǐng)域經(jīng)久不衰的研究熱點(diǎn),總的來說,快速、準(zhǔn)確、魯棒的特征點(diǎn)提取是實(shí)現(xiàn)上層任務(wù)基本要求。
2022-07-11 10:28:142288 高光譜遙感技術(shù)具有能同時(shí)反映遙感對(duì)象空間特征和光譜特征等獨(dú)特優(yōu)勢(shì),但這些優(yōu)勢(shì)也帶來了波段眾多 且相關(guān)性強(qiáng)、數(shù)據(jù)冗余度高、不利于進(jìn)一步處理與利用等問題。 通過降維可以減少數(shù)據(jù)中的冗余信息,提高處理效率, 而特征提取作為降維的一種重要方法,具有降維速度快等優(yōu)點(diǎn)。 因此,特征提取對(duì)高光譜圖像的利用有重要意義。
2022-09-26 13:53:003779 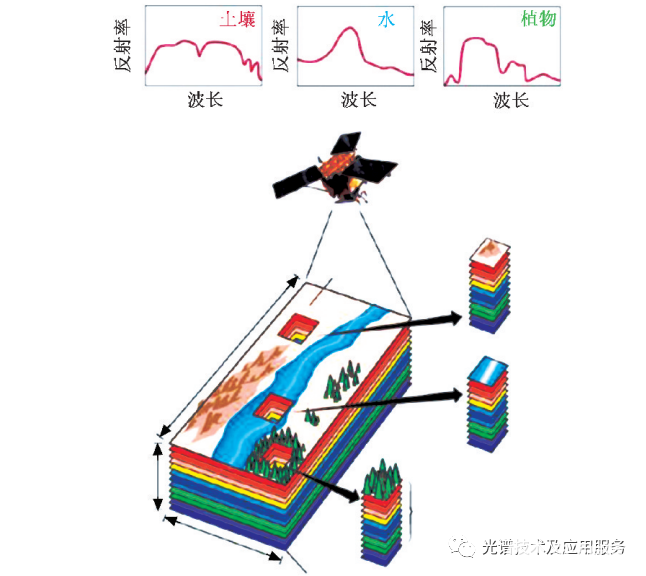
在低紋理區(qū)域,傳統(tǒng)的基于特征點(diǎn)的SfM/SLAM/三維重建算法很容易失敗。因此很多算法會(huì)嘗試去提取線特征來提高點(diǎn)特征的魯棒性,典型操作就是LSD。
2023-01-08 14:29:35846 0引言 視覺顯著性估計(jì)中通常以彩色圖像為輸入,因此,本文以3個(gè)相鄰波段的高光譜影像為輸入,進(jìn)行顯著性特征提取,然后沿光譜維度利用滑窗法獲取各個(gè)波段的顯著性特征,最后將各個(gè)波段的顯著性特征進(jìn)行堆疊形成
2023-01-12 09:45:55931 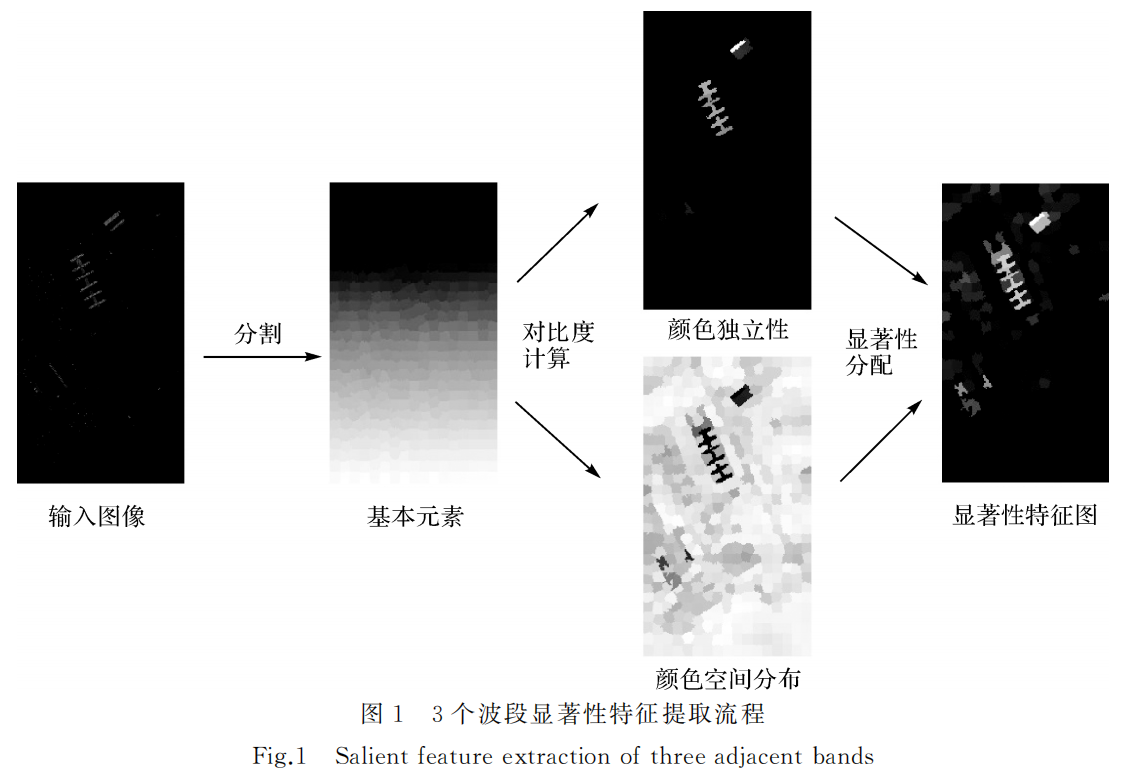
深度學(xué)習(xí)提取的特征就一定好?顯然不是的。因?yàn)閿?shù)據(jù)集的原因,利用深度學(xué)習(xí)訓(xùn)練出的特征子適用性并不一定好。貌似網(wǎng)上有一篇論文,利用orbslam框架,對(duì)比了orb和superpoint的效果。發(fā)現(xiàn)有幾組
2023-05-19 10:25:57829 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論