 電子發燒友App
電子發燒友App


由于 RT-Thread 穩定高效的內核,豐富的文檔教程,積極活躍的社區氛圍,以及設備驅動框架、Kconfig、Scons、日志系統、海量的軟件包……很難不選擇 RT-Thread 進行項目開發。但也正是因為這些優點的覆蓋面較廣,很多初學者會覺得無從下手,但只要步入 RT-Thread 的大門,你就發現她的美好。這系列文檔將作為本人基于 RT-Thread 開發 RoboMaster 電控框架的記錄與分享,希望能幫助到更多初識 RT-Thread 的小伙伴,也歡迎大家交流分享,指正不足,共同進步。
背景
Robomaster 機器人比賽包含多個兵種,為了提高研發效率,模塊化尤為重要,使用 RT-Thread 有助于面對對象思想開發;通過配備的 Kconfig,Scons 等工具可以實現工程的靈活配置;軟件定時器可用作各電機等模塊監控,RingBuffer 可以實現傳感器信息的高效處理 …….
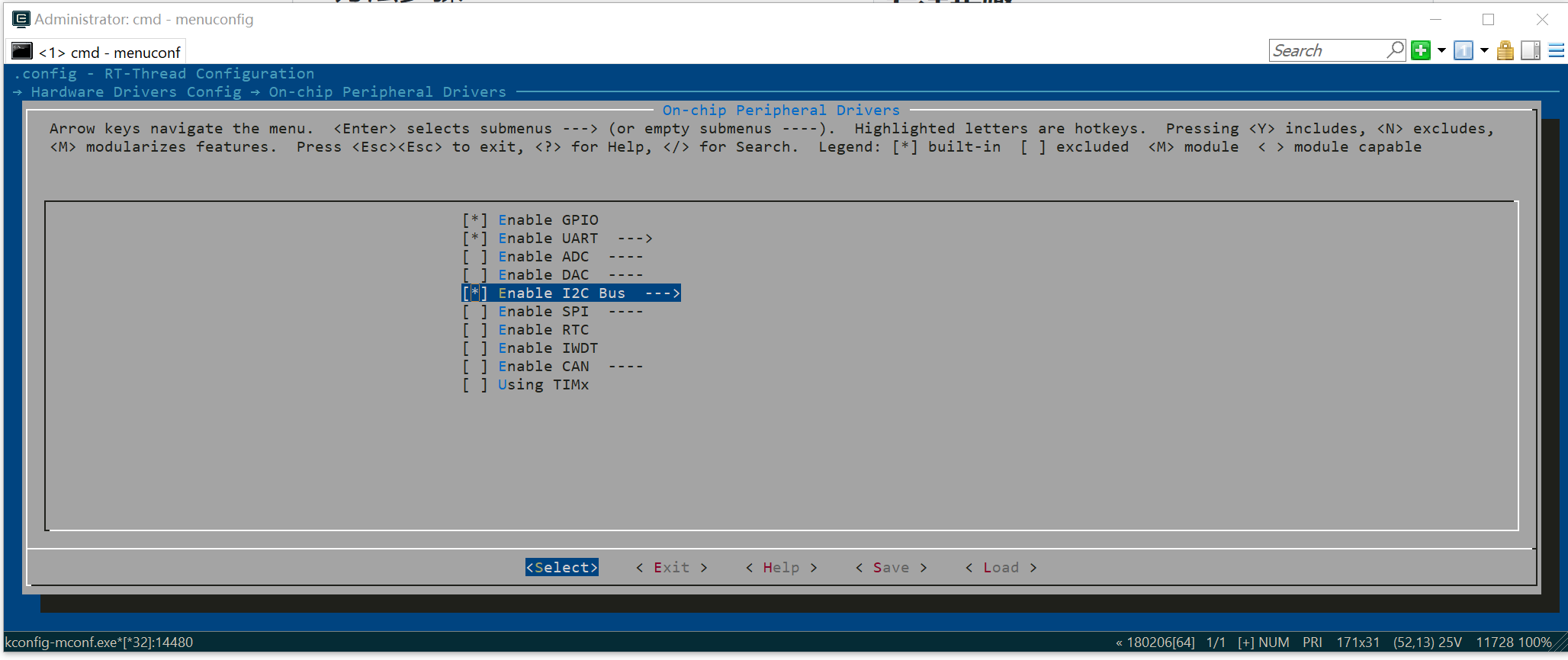
使用的開發板為大疆的 RoboMaster-C 型開發板,基礎工程為 rt-thread>bsp>stm32f407-robomaster-c
電機模塊開發
使用電機和電調均為大疆官方出品,如 2006,3508,6020 等,采用 CAN 通訊方式。
構建對象
首先我們根據使用的電機特性,構建一個通用的電機對象
/**
@brief DJI intelligent motor typedef
/
typedef struct dji_motor_object
{
rt_device_t can_dev; // 電機CAN實例
dji_motor_measure_t measure; // 電機測量值
uint32_t tx_id; // 發送id(主發)
uint32_t rx_id; // 接收id(主收)
/ 分組發送設置 /
uint8_t send_group; // 同一幀報文分組
uint8_t message_num; // 一幀報文中位置
motor_type_e motor_type; // 電機類型
motor_working_type_e stop_flag; // 啟停標志
/ 監控線程相關 /
rt_timer_t timer; // 電機監控定時器
/ 電機控制相關 */
void *controller; // 電機控制器
int16_t (*control)(dji_motor_measure_t measure); // 控制電機的接口 用戶可以自定義,返回值為16位的電壓或電流值
} dji_motor_object_t;
因為這些電機我們均使用 CAN 方式進行驅動,是 CAN 設備的延申,于是將 rt_device_t can_dev 父類結構體對象內嵌。
dji_motor_measure_t 結構體中為,電機控制時需要用到的一些反饋值,包括電調直接反饋的數據以及進一步解算的得出的:
/**
@brief DJI motor feedback
/
typedef struct
{
/ 以下是處理得出的數據 /
float angle_single_round; // 單圈角度
float speed_aps; // 角速度,單位為:度/秒
float total_angle; // 總角度,注意方向
int32_t total_round; // 總圈數,注意方向
float target; // 目標值(輸出軸扭矩矩/速度/角度(單位度))
/ 以下是電調直接回傳的數據 */
uint16_t ecd; // 0-8191
uint16_t last_ecd; // 上一次讀取的編碼器值
int16_t speed_rpm; //電機的轉速值
int16_t real_current; // 實際轉矩電流
uint8_t temperature; // Celsius
} dji_motor_measure_t;
注冊實例
通過 dji_motor_object_t *dji_motor_register(motor_config_t *config, void *controller) 注冊對應的電機實例,用戶通過 motor_config_t *config 對實例進行靈活配置:
/**
@brief 電機初始化,返回一個電機實例
@param config 電機配置
@return dji_motor_object_t* 電機實例指針
*/
dji_motor_object_t *dji_motor_register(motor_config_t *config, void *controller)
{
dji_motor_object_t *object = (dji_motor_object_t )rt_malloc(sizeof(dji_motor_object_t));
rt_memset(object, 0, sizeof(dji_motor_object_t));
// 對接用戶配置的 motor_config
object->motor_type = config->motor_type; // 6020 or 2006 or 3508
object->rx_id = config->rx_id; // 電機接收報文的ID
object->control = controller; // 電機控制器
/ 查找 CAN 設備 /
object->can_dev = rt_device_find(config->can_name);
// 電機分組,因為至多4個電機可以共用一幀CAN控制報文
motor_send_grouping(object, config);
// 電機離線檢測定時器相關
object->timer = rt_timer_create("motor1",
motor_lost_callback,
object, 20,
RT_TIMER_FLAG_PERIODIC);
rt_timer_start(object->timer);
dji_motor_enable(object);
dji_motor_obj[idx++] = object;
return object;
}
/ 電機配置結構體 */
typedef struct
{
motor_type_e motor_type;
const char *can_name;
uint32_t tx_id; // 發送id(主發)
uint32_t rx_id; // 接收id(主收)
void *controller; // 電機控制器
} motor_config_t;
motor_config_t 結構體中的 void *controller 為電機所使用到的控制器集合,是一個控制器類型為其成員的結構體變量,如下:
static struct chassis_controller_t{
pid_object_t *speed_pid;
}chassis_controller;
static struct gimbal_controller_t{
pid_object_t *speed_pid;
pid_object_t *angle_pid;
}gimbal_controlelr;
調用 dji_motor_object_t *dji_motor_register 時傳入的 void *controller 為電機對應的控制器具體實現,如進行 pid 計算,濾波等,會賦值給電機對象對應的函數指針,在進行電機控制計算時被執行,如下:
rt_int16_t chassis_control(dji_motor_measure_t measure){
static rt_int16_t set = 0;
set = pid_calculate(chassis_controller.speed_pid, measure.speed_rpm, 1000);
return set;
}
數據處理
電機對象離不開對數據穩定快速的收發和解析計算,接下來展開討論使用 RT-Thread 的 CAN 設備驅動收發數據的思路。
首先是數據的接收,stm32f4 擁有 2 個 CAN 外設,所有電機和使用 CAN 總線的設備都掛載在這兩條總線上,但 RT-Thread 的每個 CAN 總線只能通過 rt_device_set_rx_indicate(can_dev, can_rx_call); 注冊一個對應的接收回調函數。但不同類型電機,不同 CAN 設備的數據解析處理都是不一樣的,我這里的解決思路是:首先創建了一個 usr_callback 文件,用于統一管理 CAN、串口等設備可能用到的用戶接收對調函數;將一個大的設備類型回調函數注冊到對應 CAN 設備,其中再細分各掛載設備的數據解析,實現如下:
#ifdef BSP_USING_CAN
rt_err_t can_rx_call(rt_device_t dev, rt_size_t size)
{
struct rt_can_msg rxmsg = {0};
uint8_t rxbuff = rxmsg.data;
/ 從 CAN 讀取一幀數據 /
rt_device_read(dev, 0, &rxmsg, sizeof(rxmsg));
/ CAN 接收到數據后產生中斷,調用此回調函數,然后發送接收信號量 /
#ifdef BSP_USING_DJI_MOTOR
dji_motot_rx_callback(rxmsg.id, rxbuff);
#endif / BSP_USING_DJI_MOTOR /
return RT_EOK;
}
#endif / BSP_USING_CAN */
但是這其中也有一點問題,rt_err_t can_rx_call(rt_device_t dev, rt_size_t size) 傳入的參數無法判斷具體的 CAN 設備來源,因此所有使用到的 CAN 外設數據處理函數都會被調用,但目前問題不大,因為同一條總線上不會掛載相同 ID 的設備,這也是一開始就應該避免的錯誤。
接下來是 CAN 報文的發送,調用 rt_device_write 發送填充好的 CAN 報文幀即可。
離線檢測
這里使用 RT-Thread 的軟件定時器對電機進行離線檢測,當超過定時間沒有接收到對應電機反饋報文,則進入超時回調,并輸出警告日志:
/**
@brief 電機定時器超時回調函數
@param motor_ptr
*/
static void motor_lost_callback(void *motor_ptr)
{
dji_motor_object_t *motor = (dji_motor_object_t *)motor_ptr;
// dji_motor_stop(motor);
LOG_W("[dji_motor] Motor lost, can bus [%s] , id 0x[%x]", motor->can_dev->parent.name, motor->rx_id);
}
使用實例
封裝完成的電機模塊使用示例如下:
static struct chassis_controller_t{
pid_object_t *speed_pid;
}chassis_controller;
static struct gimbal_controller_t{
pid_object_t *speed_pid;
pid_object_t *angle_pid;
}gimbal_controlelr;
static dji_motor_object_t *chassis_motor;
static dji_motor_object_t *gimbal_motor;
rt_int16_t chassis_control(dji_motor_measure_t measure){
static rt_int16_t set = 0;
set = pid_calculate(chassis_controller.speed_pid, measure.speed_rpm, 1000);
return set;
}
rt_int16_t gimbal_control(dji_motor_measure_t measure){
static rt_int16_t set = 0;
set = pid_calculate(gimbal_controlelr.speed_pid, measure.speed_rpm, 0);
return set;
}
static void example_init()
{
pid_config_t chassis_speed_config = {
.Kp = 10, // 4.5
.Ki = 0, // 0
.Kd = 0, // 0
.IntegralLimit = 3000,
.Improve = PID_Trapezoid_Intergral | PID_Integral_Limit | PID_Derivative_On_Measurement,
.MaxOut = 12000,
};
pid_config_t gimbal_speed_config = {
.Kp = 50, // 50
.Ki = 200, // 200
.Kd = 0,
.Improve = PID_Trapezoid_Intergral | PID_Integral_Limit | PID_Derivative_On_Measurement,
.IntegralLimit = 3000,
.MaxOut = 20000,
};
chassis_controller.speed_pid = pid_register(&chassis_speed_config);
gimbal_controlelr.speed_pid = pid_register(&gimbal_speed_config);
motor_config_t chassis_motor_config = {
.motor_type = M3508,
.can_name = CAN_CHASSIS,
.rx_id = 0x201,
.controller = &chassis_controller,
};
motor_config_t gimbal_motor_config = {
.motor_type = GM6020,
.can_name = CAN_GIMBAL,
.rx_id = 0x206,
.controller = &gimbal_controlelr,
};
chassis_motor = dji_motor_register(&chassis_motor_config, chassis_control);
gimbal_motor = dji_motor_register(&gimbal_motor_config, gimbal_control);
}
到此就可以方便且靈活的配置和使用電機模塊啦。
存在問題及優化方向
目前 rt-thread 下 stm32 can驅動似乎僅支持 FIFO0 ,但 stm32f4 系列 can 具備兩個 FIFO,如能同時使能所有 FIFO,應該能有效提高性能和穩定性。
電機的離線回調可以增加相應的聲光報警。
后續考慮能不能也優化為,read,write,control 等形式。


















 工商網監
工商網監
評論